课后习题及答案_第2章时域离散信号和系统的频域分析--习题答案.doc
- 格式:pdf
- 大小:253.99 KB
- 文档页数:21


《信号与系统》课后习题参考答案第二章 连续信号与系统的时域分析2-9、(1)解:∵系统的微分方程为:)(2)(3)(t e t r t r '=+',∴r(t)的阶数与e(t) 的阶数相等,则h(t)应包含一个)(t δ项。
又∵系统的特征方程为:03=+α,∴特征根3-=α∴)()(2)(3t u Ae t t h t -+=δ∴)]()(3[)(2)(33t e t u e A t t h t t δδ--+-+'=')()(3)(23t A t u Ae t t δδ+-'=-将)(t h 和)(t h '代入微分方程(此时e(t)= )(t δ),得:)()(3)(23t A t u Ae t t δδ+-'-+3)(2)]()(2[3t t u Ae t t δδ'=+-∴A=-6则系统的冲激响应)(6)(2)(3t u et t h t --=δ。
∴⎰⎰∞--∞--==t td ue d h t g τττδτττ)](6)(2[)()(3⎰∞-=t d ττδ)(2⎰∞---t d u e τττ)(63 )()(6)(203t u d e u t t ⎰-∞--=τττ )()3(6)(203t u e t u t --=-τ)()1(2)(23t u e t u t -+=- )(23t u e t -=则系统的阶跃响应)(2)(3t u et g t -=。
2-11、解:①求)(t r zi : ∵系统的特征方程为:0)3)(2(652=++=++αααα,∴特征根:21-=α,32-=α ∴t t zi e C eC t r 3221)(--+= (t ≥0) ②求)(t r zs :t t e A eA t h 3221)(--+= (t ≥0),可求得:11=A ,12-=A (求解过程略) ∴)()()(32t u e e t h t t ---=∴)(*)()(*)()]()[(*)()(*)()(3232t u e t u e t u e t u e t u e e t u e t h t e t r t t t t t t t zs --------=-==)()2121()()(21)()(3232t u e e e t u e e t u e e t t t t t t t -------+-=---= ③求)(t r :)(t r =)(t r zi +)(t r zs ++=--)(3221t te C e C )2121(32t t t e e e ---+- t tt e C e C e 3221)21()1(21---++-+= (t ≥0) ∵)()(t u Ce t r t -=,21=C 21=C ∴ 011=-C , ∴ 11=C0212=+C 212-=C ∴=-)0(r 21211)0(21=-=+=+C C r zi , ='-)0(r 2123232)0(21-=+-=--='+C C r zi 2-12、解:(1)依题意,得:)(2)(*)()(t u e t h t u t r tzi -=+)()()(t t h t r zi δ=+∴)(2)]()([*)()(t u e t r t t u t r t zi zi -=-+δ)(2)()()()1(t u e t r t u t r t zi zi --=-+∴)()12()()()1(t u e t r t r t zi zi -=---,两边求导得:)()12()(2)()(t e t u e t r t r t t zi ziδ-+-=-'-- )(2)()()(t u e t t r t r t zi zi--=-'δ ∴)(11)(112)()()1(t p p t p t t r p zi δδδ+-=+-=- ∴)()(11)(t u e t p t r t zi -=+=δ (2)∵系统的起始状态保持不变,∴)()(t u e t r t zi -=∵)()()(t t h t r zi δ=+,∴)()()(t u e t t h t--=δ∴)]()([*)()()(*)()()(33t u e t t u e t u e t h t e t r t r t t t zi ----+=+=δ )()()(t u te t u e t u e tt t ----+=)()2(t u e t t --= 2-16、证:∑∑∞-∞=--∞-∞=--=-=k k t k t k t u e k t t u e t r )3()3(*)()()3(δ∑∞-∞=--=k k t k t u e e )3(3 ∵当t-3k>0即3t k <时:u(t-3k)为非零值 又∵0≤t ≤3,∴k 取负整数,则:3003311)(---∞=∞=----===∑∑e e e e e et r t k k k t k t 则t Ae t r -=)(,且311--=e A 。



————第一章———— 时域离散信号与系统理论分析基础本章1.1节“学习要点”和1.2节“例题”部分的内容对应教材第一、二章内容。
为了便于归纳总结,我们将《数字信号处理(第二版)》教材中第一章和第二章的内容合并在一起叙述,这样使读者对时域离散线性时不变系统的描述与分析方法建立一个完整的概念,以便在分析和解决问题时,能全面考虑各种有效的途径,选择最好的解决方案。
1.1 学 习 要 点1.1.1 时域离散信号——序列时域离散信号(以下简称序列)是时域离散系统处理的对象,研究时域离散系统离不开序列。
例如,在时域离散线性时不变系统的时域描述中,系统的单位脉冲响应()n h 就是系统对单位脉冲响应()n δ的响应输出序列。
掌握()n δ的时域和频域特征,对分析讨论系统的时域特性描述函数()n h 和频域特性描述函数()ωj e H 和()z H 是必不可少的。
1. 序列的概念在数字信号处理中,一般用()n x 表示时域离散信号(序列)。
()n x 可看作对模拟信号()t x a 的采样,即()()nT x n x a =,也可以看作一组有序的数据集合。
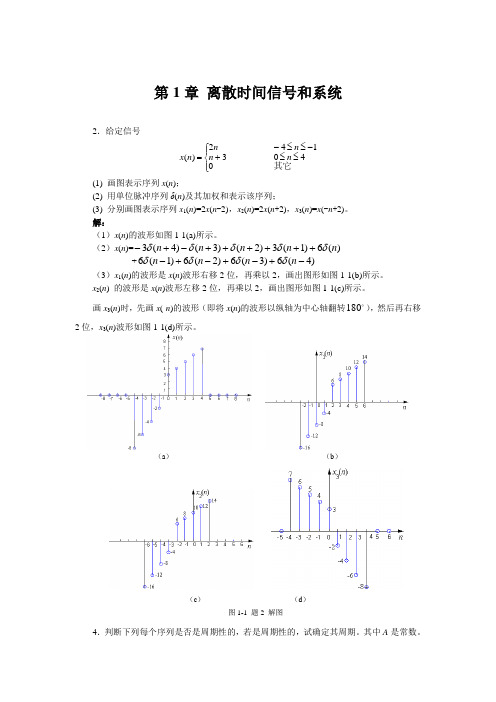
要点 在数字信号处理中,序列()n x 是一个离散函数,n 为整数,如图1.1所示。
当≠n 整数时,()n x 无定义,但不能理解为零。
当()()nT x n x a =时,这一点容易理解。
当=n 整数时,()()nT x n x a =,为()t x a 在nT t =时刻的采样值,非整数T 时刻未采样,而并非为零。
在学习连续信号的采样与恢复时会看到,()n x 经过低通滤波器后,相邻的()T n nT 1~+之间的()t x a 的值就得到恢复。
例如,()n x 为一序列,取()()2n x n y =,n 为整数是不正确的,因为当=n 奇数时,()n y 无定义(无确切的值)。
2. 常用序列常用序列有六种:①单位脉冲序列()n δ,②矩形序列()n R N ,③指数序列()n u a n,④正弦序列()n ωcos 、()n ωsin ,⑤复指数序列nj eω,⑥周期序列。


第2章 时域离散信号和系统的频域分析上级习题答案1.解:调用MATLAB函数filter计算该系统。
系统响应的程序ex230.m如下:%程序ex230.m%调用roots函数求极点,并判断系统的稳定性A=[3,-3.98, 1.17, 2.3418,-1.5147];%H(z)的分母多项式系数p=roots(A) %求H(z)的极点pm=abs(p);%求H(z)的极点的模if max(pm)<1 disp(′系统因果稳定′),else,disp(′系统不因果稳定′),end程序运行结果如下:极点:-0.7486 0.6996-0.7129i0.6996+0.7129i0.6760由极点分布判断系统因果稳定。
2. 解:(1)求解程序ex231.m如下:%程序ex231.m%判断系统的稳定性A=[2,-2.98,0.17, 2.3418,-1.5147];%H(z)的分母多项式系数B=[0,0,1,5,-50];%H(z)的分子多项式系数用极点分布判断系统是否稳定subplot(2,1,1);zplane(B,A);%绘制H(z)的零极点图p=roots(A);%求H(z)的极点pm=abs(p);%求H(z)的极点的模if max(pm)<1 disp(′系统因果稳定′),else,disp(′系统不因果稳定′),end%画出u(n)的系统输出波形进行判断un=ones(1,700);sn=filter(B,A,un);n=0:length(sn)-1;subplot(2,1,2);plot(n,sn)xlabel(′n′);ylabel(′s(n)′)程序运行结果如下:系统因果稳定。
系统的零极点图如下图所示。
(2)系统对于单位阶跃序列的响应如题31*解图所示,因为它趋于稳态值,因此系统稳定。
3. 解:求解程序为ex232.m,程序如下:%程序ex232.mA=[1,-1.6,0.9425];%H(z)的分母多项式系数B1=1;B2=[1,-0.3];B3=[1,-0.8];B4=[1,-1.6,0.8];%H(z)的分子多项式系数b1=[1 0 0];b2=[1 -0.3 0]; b3=[1,-0.8,0];b4=[1,-1.6,0.8];%H(z)的正次幂分子多项式系数p=roots(A) %求H1(z),H2(z),H3(z),H4(z)的极点z1=roots(b1) %求H1(z)的零点z2=roots(b2) %求H2(z)的零点z3=roots(b3) %求H3(z)的零点z4=roots(b4) %求H4(z)的零点[h1n,n]=impz(B1,A,100);%计算单位脉冲响应h1(n)的100个样值[h2n,n]=impz(B2,A,100);%计算单位脉冲响应h1(n)的100个样值[h3n,n]=impz(B3,A,100);%计算单位脉冲响应h1(n)的100个样值[h4n,n]=impz(B4,A,100)%计算单位脉冲响应h1(n)的100个样值%======================================%以下是绘图部分subplot(2,2,1);zplane(B1,A);%绘制H1(z)的零极点图subplot(2,2,2);stem(n,h1n,′.′);%绘制h1(n)的波形图line([0,100],[0,0])xlabel(′n′);ylabel(′h1(n)′)subplot(2,2,3);zplane(B2,A);%绘制H2(z)的零极点图subplot(2,2,4);stem(n,h2n,′.′);%绘制h2(n)的波形图line([0,100],[0,0])xlabel(′n′);ylabel(′h2(n)′)figure(2);subplot(2,2,1);zplane(B3,A);%绘制H3(z)的零极点图subplot(2,2,2);stem(n,h3n,′.′);%绘制h3(n)的波形图line([0,100],[0,0])xlabel(′n′);ylabel(′h3(n)′)subplot(2,2,3);zplane(B4,A);%绘制H4(z)的零极点图subplot(2,2,4);stem(n,h4n,′.′);%绘制h4(n)的波形图line([0,100],[0,0])xlabel(′n′);ylabel(′h4(n)′)程序运行结果如下图所示。

1第2章时域离散信号和系统的频域分析z 2.1 引言z 2.2 序列的傅里叶变换的定义及性质z 2.4 时域离散信号的傅里叶变换与模拟信号傅里叶变换之间的关系z 2.5 序列的Z 变换z 2.6 利用Z变换分析信号和系统的频域特性22.1 引言信号和系统的分析方法:时域分析方法和变换域分析方法。
频域变换(傅里叶变换->复频域拉氏变换)连续时间信号(系统微分方程)频域变换(傅里叶变换->复频域Z 变换)时域离散信号(系统差分方程)本章学习内容是本书也是数字信号处理这一领域的基础。
3第2章时域离散信号和系统的频域分析z 2.1 引言z 2.2 序列的傅里叶变换的定义及性质z 2.4 时域离散信号的傅里叶变换与模拟信号傅里叶变换之间的关系z 2.5 序列的Z 变换z 2.6 利用Z变换分析信号和系统的频域特性2.2 序列的傅里叶变换的定义及性质5例2.2.1 设x(n)=R 4(n),求x(n)的DTFT 图2.2.1 R (n)的幅度与相位曲线sin /2ω常用序列的傅立叶变换7(2)()j M nn x n eωπ∞−+=−∞=∑二、序列离散时间傅里叶变换(DTFT)的性质1. DTFT 的周期性()()j j nn X e x n eωω∞−=−∞=∑(2)()j M X eωπ+=时域离散,频域周期函数。
周期是2π。
由于DTFT 的周期,一般只分析0-2π之间的DTFT 。
2. 线性1122:()[()],()[()]j j X e DTFT x n X e DTFT x n ωω==若1212:[()()]()()j j DTFT ax n bx n aX e bX e ωω+=+则3. 时移与频移00(0:[()](),[()]()j n j nj j DTFT x n n eX e DTFT ex n X eωωωωω−−−==则:()[()]j X e DTFT x n ω=若4. 反转7. 帕斯维尔(Parseval)定理8. 频域微分序列的Fourier变换的对称性质*()x n−)n也可分解成:e−*(e对称性质•序列Fourier 变换()()j x n X e ωRe[()]()j e x n X e ωIm[()]()j o j x n X e ω()Re[()]j e x n X e ω()Im[()]j o x n j X e ω实数序列的对称性质•序列Fourier 变换Re[()]()()j j e x n X e X e ωω=Im[()]0()0j o j x n X e ω==()Re[()]j e x n X e ω()Im[()]j o x n j X e ω)j eω−变换满足共轭对称性()]j X eω−Im[()]j X e ω−)arg[结论:z序列分成实部与虚部两部分,实部对应的DTFT具有共轭对称性,虚部和j一起对应的DTFT具有共轭反对称性。


