拉氏变换练习题(14级)
- 格式:doc
- 大小:202.00 KB
- 文档页数:3
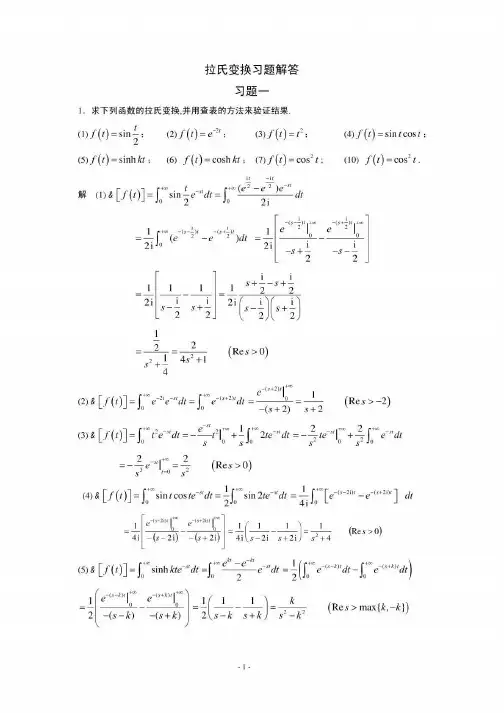
第四章 习题解4-1 根据拉氏变换定义,求下列函数的拉普拉斯变换。
(1)ate --1(2)()()t t 5cos 73sin 2+ (3)tet 3-(4)()t et5cos 4-(5)()[]tb e at --cos 1(6)()tett 22531-++(7)5232++t t (8)()te t 732--δ(9)()t Ω2cos (10)t t e e βα--- (11)()t et5cos 22-(12)()ϕω+t cos解:(1))(111]1[a s s a s s e L at +=+-=-- (2)()()2579657323]5cos 73sin 2[222222+++=+++⨯=+s s s s s s t t L (3)23)3(1][+=-s et L t(4)())](21[)](21[]5cos [)54()54(45544t j t j t t j t j t te e e jL e e e j L t eL --+-----+=+= 25)4(5)541541(212++=+++-+=s j s j s j (5)()[]()]cos []cos 1[at e e L e at L t b t b tb ----=-22)(1ab s a b s ++++=(6)由于1!][+=n ns n t L ,由s 域频移特性得()]53[]531[222222t t t t e t te e L e t t L ----++=++ 3232)2(207)2(10)2(3)2(1+++=+++++=s s s s s s (7)32232526526]523[ss s s s s t t L ++=++=++ (8)()732]32[7+-=--s et L tδ(9)()()22242121]2cos 2121[]cos [Ω+⋅+=Ω+=Ωs ss t L t L (10)))((11][βααββαβα++-=+-+=---s s s s e eL t t(11)在(9)的计算结果基础上由s 域频移特性得()25)2(221)2(21]5cos [222+++⋅++=-s s s t e L t (12)()]sin sin cos cos []cos [ϕωϕωϕωt t L t L -=+222222s i n c o s s i n c o s ωϕωϕωϕωωϕ+-=+-+=s s s s s4-7 求下列函数的拉普拉斯反变换。
积分变换练习题 第二章 Laplace 变换________系_______专业 班级 姓名______ ____学号_______§1 Laplace 变换的概念 §2 Laplace 变换的性质一、选择题1.设()(1)t f t e u t -=-,则[()]f t =L [ ](A )(1)1s e s --- (B )(1)1s e s -++ (C )1s e s -- (D )1se s -+11[(1)][()];1[(1)](1)ss t s u t e u t se e u t s e --+⎛⎫-== ⎪ ⎪ ⎪-= ⎪+⎝⎭由延迟性质可得,再由位移性质可得,L L L2.设2sinh ()tf t t =,则[()]f t =L [ ] (A )1ln 1s s -+ (B )1ln 1s s +- (C )12ln 1s s -+ (D )12ln 1s s +-见课本P84二、填空题1.设2()(2)f t t u t =-,则[]()f t =L。
22''222321[(2)][()];1442[(1)]ss s s u t e u t se s s t u t se s e -⎛⎫-== ⎪ ⎪++ ⎪⎛⎫-== ⎪ ⎪⎝⎭⎝⎭由延迟性质可得,再由象函数的微分性质P83(2.7)可得,L L L 2.设2()t f t t e =,则[]()f t =L。
(1)00''231[](Re()1);112[]1(1)t t st s t te e e dt e dt s s t e s s +∞+∞---⎛⎫===> ⎪- ⎪ ⎪⎛⎫== ⎪ ⎪--⎝⎭⎝⎭⎰⎰再由象函数的微分性质P83(2.7)可得,L L 三、解答题1.求下列函数的Laplace 变换:(1)302()12404t f t t t ≤<⎧⎪=-≤<⎨⎪≥⎩242242422402[()]()3(1)33334ststst st st s s s s s f t f t e dt e dt e dte e e e e e e s s s s s s s+∞----------==+--+=+=-++-=-⎰⎰⎰L(2)3,2()cos ,2t f t t t ππ⎧<⎪⎪=⎨⎪>⎪⎩20222222()22202222[()]()3cos 3333,cos cos()sin 2133[()].1stst st sst stst s s sts ssf t f t e dt e dt te dtee e dt ss se te dt ed ee d s e ef t s s sπππππππτππττππππττττ+∞+∞--------=+∞+∞+∞-+-----==+==-+-=+=-=-+=--++⎰⎰⎰⎰⎰⎰⎰,从而L L(3)()sin2tf t = 222002[()]sin 2sin .241t st s t f t e dt e d s ττττ=+∞+∞--===+⎰⎰L(4)()cos ()sin ()f t t t t u t δ=⋅-⋅200[()][cos ()sin ()]cos ()sin ()1cos sin 1.1st stst stst t f t t t t u t e dtt t e dt t u t e dttete dt s δδ-+∞-+∞+∞--+∞--==⋅-⋅=⋅-⋅=-=-+⎰⎰⎰⎰L2.求以2b 为周期的函数1,0()1,2t bf t b t b<≤⎧=⎨-<≤⎩的Laplace 变换。
拉普拉斯变换1. 当系统函数)(s H 的极点位于 时,)(t h 绝对可积,系统稳定。
A 、左半平面 B 、右半平面C 、虚轴D 、实轴2011-2012期末卷B2、当系统函数为()()231KH s s K s =+-+时,K 满足 系统稳定。
A 、1K < B 、3K > C 、03K << D 、3K < 2012-2013期末卷A3. 一个连续LTI 因果系统稳定(不包括临界稳定)的条件不包括( ) A .有界输入产生有界输出 B .()h t dt M∞-∞≤⎰,M 为有界正值C .s 平面的右半平面没有极点D .lim ()0t h t →∞=4.某系统的系统函数21()32H s s s K=++-,则常数K 取值范围为( )时系统稳定。
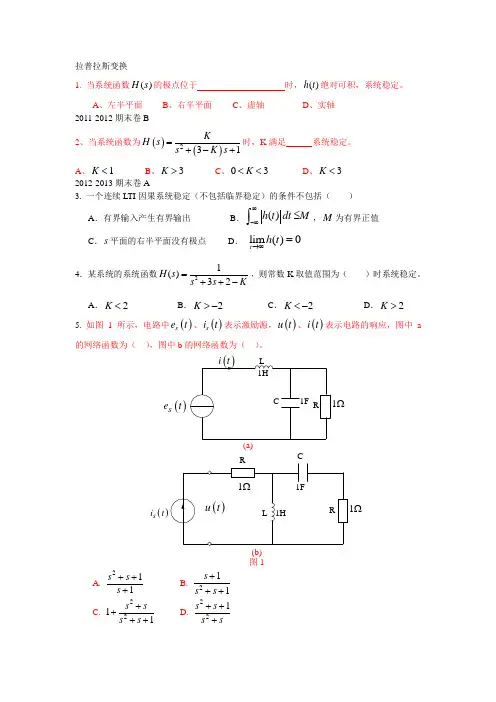
A .2K < B .2K >- C .2K <- D .2K > 5. 如图1所示,电路中()s e t 、()s i t 表示激励源,()u t 、()i t 表示电路的响应,图中a 的网络函数为( ),图中b 的网络函数为( )。
()s e t 1Ω()s i t 1Ω图1A. 211s s s +++B.211s s s +++ C. 2211s ss s ++++D. 221s s s s+++6.象函数()()2211+=+s F s s 的初值()0+f 为( ) A 、0B 、1C 、2D 、37.如果一个因果线性时不变系统的系统函数()H s 的所有极点的实部都小于零,则( ) A 、系统为非稳定系统 B 、()h t <∞ C 、系统为稳定系统D 、()00h t dt ∞=⎰8.象函数()()2211+=+s F s s 的终值()f ∞为( ) A 、0B 、1C 、2D 、39.因果系统的系统函数为()2232H s s s =++,则该系统是( )A 、稳定的B 、不稳定的C 、临界稳定的D 、不确定10. 函数()1t t e e αββα----的拉氏变换为( )A 、11s s αβ+++ B 、s s βα++ C 、s s αβ++D 、()()1s s αβ++11. 象函数()22125s s s s +++的终值为( )A 、0B 、1C 、15D 、1212. 函数sin 2cos t t +的拉氏变换为( ) A 、2211s s ++ B 、()2211s s ++ C 、21s s ++ D 、211s s ++ 13. 象函数231056s s s +++的初值为( ) A 、0B 、3C 、53D 、8514.0cos ()t t ωε的拉氏变换为( )。
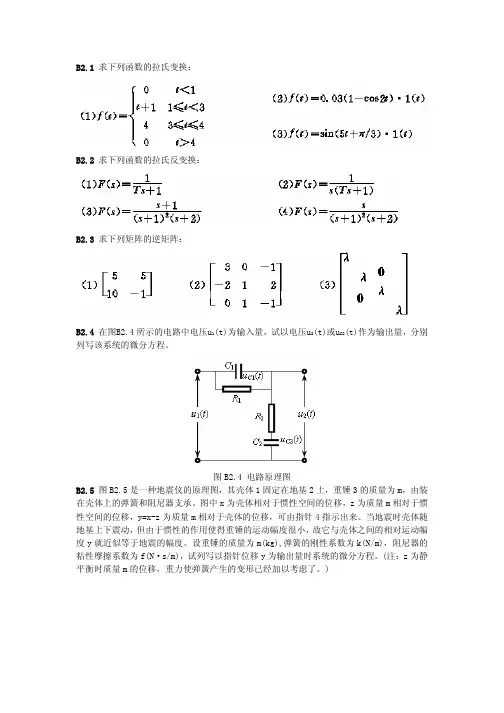
B2.1 求下列函数的拉氏变换:B2.2 求下列函数的拉氏反变换:B2.3 求下列矩阵的逆矩阵:B2.4 在图B2.4所示的电路中电压u1(t)为输入量,试以电压u2(t)或u C2(t)作为输出量,分别列写该系统的微分方程。
图B2.4 电路原理图B2.5 图B2.5是一种地震仪的原理图,其壳体1固定在地基2上,重锤3的质量为m,由装在壳体上的弹簧和阻尼器支承。
图中x为壳体相对于惯性空间的位移,z为质量m相对于惯性空间的位移,y=x-z为质量m相对于壳体的位移,可由指针4指示出来。
当地震时壳体随地基上下震动,但由于惯性的作用使得重锤的运动幅度很小,故它与壳体之间的相对运动幅度y就近似等于地震的幅度。
设重锤的质量为m(kg),弹簧的刚性系数为k(N/m),阻尼器的粘性摩擦系数为f(N·s/m),试列写以指针位移y为输出量时系统的微分方程。
(注:z为静平衡时质量m的位移,重力使弹簧产生的变形已经加以考虑了。
)图B2.5 地震仪原理图图B2.6 机械系统原理图B2.6 设机械系统如图B2.6所示,图中z i为输入位移,z o为输出位移。
试分别列写各系统的微分方程。
B2.7 例A1.2所讨论的液位控制系统(如图1.29所示),设液箱的横截面积为S,希望的液位高度为h 0,若液位高度的变化率与液体流量差(Q1-Q2)成正比,试列写以液位高度为输出量时系统的微分方程。
B2.8 设系统的微分方程为试用拉氏变换法进行求解。
B2.9 已知控制系统的微分方程(或微分方程组)为 式中r(t)为输入量,y(t)为输出量,z1(t)、z2(t)和z3(t)为中间变量,τ、β、K1和K2均为常数。
试求:(a)各系统的传递函数Y(s)/R(s);(b)各系统含有哪些典型环节?B2.10 求题B2.4~B2.7各系统的传递函数。
B2.11 设控制系统的结构图如图B2.11所示,图中G1(s)和G2(s)所对应环节的微分方程分别为0.125u•+u=e•+3e和0.5y¨+y•=2u,试求该系统的传递函数Y(s)/R(s)和E(s)/R(s)。