航模螺旋桨基础知识1
- 格式:doc
- 大小:236.00 KB
- 文档页数:4
模型无刷电机KV值解释模型无刷电机的参数指标,除了外形尺寸(外径、长度、轴径等)、重量、电压范围、空载电流、最大电流等参数外,还少不了一个重要指标--KV值,这个数值是无刷电机独有的一个性能参数,是判断无刷电机性能特点的一个重要数据。
KV值定义无刷电机KV值定义为转速/V,意思为输入电压增加1伏特,无刷电机空转转速增加的转速值。
总这个定义来看,我们能知道,无刷电机电压的输入与电机空转转速是遵循严格的线性比例关系的。
KV值的意义无刷电机的意义不只是说明电机转速与电压成严格的线性比例关系,还对于电机的性能有一个开阔性的表示。
用过无刷电机的朋友大都有这种感觉,同级别(外径)的无刷电机,外转子的和内转子的通电比较一下,会发觉外转子电机扭力大一些,要“硬”一些,内转子电机扭力稍微小一些,要“软”一些,一看电机参数,外转子电机KV值800多,内转子电机1000多到2000多。
再看一下转速,内转子电机的转速明显高于外转子电机。
其实这些特性都与KV 值有关,按照KV值的定义来解释,无刷电机的空转极速,是KV值乘以输入的电压,这也就解释了内转子电机的转速为什么高于外转子无刷电机。
就扭力特性来看,KV值一定意义上体现了电机扭力性能,拿外转子电机来说,电机的空载极速一般般,但是加上负载(例如螺旋桨)后,其极速降落到空载极速的60%-70%,但是拿同级别的内转子电机来测试的话,其带负载的转速只能到其空载极速的30%-40%,这明显体现出这两种电机的扭力特性差别,内转子电机的带负载的能力相对较低,为了满足扭力做功,内转子电机必需自行降速,增加通过电流,在电压不变的情况下,这样电机的输出功率就增加了,内转子电机的这种扭力特性也体现在具体的应用上,以前不少轻型泡沫固定翼飞机,最初都用的是内转子无刷电机,但是因为扭力特性的缘故,飞机螺旋桨并不是直接连接在电机上(非直驱),而是增加了一个减速齿轮组,为的就是改善内转子电机的扭力性能。
空气螺旋桨把发动机旋转作功形式转变为直线作功形式;把发动机的功率转变为拉动飞机前进的有效功率。
它的工作效率及与发动机有配合程度,直接影响模型飞机的性能。
在航模竞技比赛中,出于追求动力组极限水平的需要,对螺旋桨的要求更为“苛刻”;因此以“量体裁衣”手工方式制作螺旋桨的好处显而易见。
航模初学者能够扎实地掌握这一手艺很有必要。
本文以一个直径(D)200mm、几何桨距(H)120mm的两叶等距螺旋桨(适用于装有1.5cc 压燃式发动机或2.5cc电热式发动机的特技模型飞机)为例,介绍削制螺旋桨的方法。
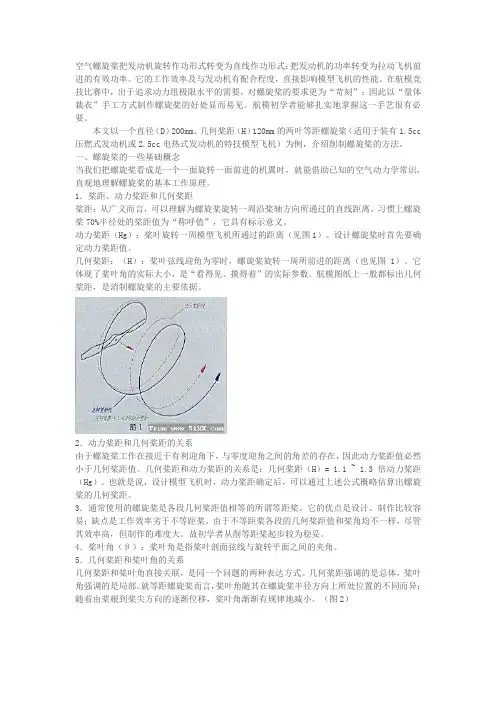
一、螺旋桨的一些基础概念当我们把螺旋桨看成是一个一面旋转一面前进的机翼时,就能借助已知的空气动力学常识,直观地理解螺旋桨的基本工作原理。
1.桨距、动力桨距和几何桨距桨距:从广义而言,可以理解为螺旋桨旋转一周沿桨轴方向所通过的直线距离。
习惯上螺旋桨70%半径处的桨距值为“称呼值”,它具有标示意义。
动力桨距(Hg):桨叶旋转一周模型飞机所通过的距离(见图1)。
设计螺旋桨时首先要确定动力桨距值。
几何桨距:(H):桨叶弦线迎角为零时,螺旋桨旋转一周所前进的距离(也见图1)。
它体现了桨叶角的实际大小,是“看得见、摸得着”的实际参数。
航模图纸上一般都标出几何桨距,是消制螺旋桨的主要依据。
2.动力桨距和几何桨距的关系由于螺旋桨工作在接近于有利迎角下,与零度迎角之间的角差的存在,因此动力桨距值必然小于几何桨距值。
几何桨距和动力桨距的关系是:几何桨距(H)= 1.1 ~ 1.3倍动力桨距(Hg)。
也就是说,设计模型飞机时,动力桨距确定后,可以通过上述公式概略估算出螺旋桨的几何桨距。
3.通常使用的螺旋桨是各段几何桨距值相等的所谓等距桨。
它的优点是设计、制作比较容易;缺点是工作效率劣于不等距桨。
由于不等距桨各段的几何桨距值和桨角均不一样,尽管其效率高,但制作的难度大。
故初学者从削等距桨起步较为稳妥。
4.桨叶角(β):桨叶角是指桨叶剖面弦线与旋转平面之间的夹角。
(1)伯努利原理如果两手各拿一张薄纸,使它们之间的距离大约4~6厘米。
然后用嘴向这两张纸中间吹气,你会看到,这两张纸不但没有分开,反而相互靠近了,而且用最吹出的气体速度越大,两张纸就越靠近。
从这个现象可以看出,当两纸中间有空气流过时,压强变小了,纸外压强比纸内大,内外的压强差就把两纸往中间压去。
中间空气流动的速度越快,纸内外的压强差也就越大。
(2)机翼升力原理飞机机翼地翼剖面又叫做翼型,一般翼型的前端圆钝、后端尖锐,上表面拱起、下表面较平,呈鱼侧形。
前端点叫做前缘,后端点叫做后缘,两点之间的连线叫做翼弦。
当气流迎面流过机翼时,由于机翼地插入,被分成上下两股。
通过机翼后,在后缘又重合成一股。
由于机翼上表面拱起,是上方的那股气流的通道变窄。
根据气流的连续性原理和伯努利定理可以得知,机翼上方的压强比机翼下方的压强小,也就是说,机翼下表面受到向上的压力比机翼上表面受到向下的压力要大,这个压力差就是机翼产生的升力。
(3)失速原理在机翼迎角较小的范围内,升力随着迎角的加大而增大。
但是,当迎角加大到某个值时,升力就不再增加了。
这时候的迎角叫做临界迎角。
当超过临界迎角后,迎角再加大,阻力增加,升力反而减小。
这现象就叫做失速。
产生失速的原因是:由于迎角的增加,机翼上表面从前缘到最高点压强减小和从最高点到后缘压强增大的情况更加突出。
当超过临界迎角以后,气流在流过机翼的最高点不多远,就从翼表面上分离;了,在翼面后半部分产生很大的涡流,造成阻力增加,升力减小。
(4)人工扰流方案要推迟失速的发生,就要想办法使气流晚些从机翼上分离。
机翼表面如果是层流边界层,气流比较容易分离;如果是絮流边界层,气流比较难分离。
也就是说,为了推迟失速,在机翼表面要造成絮流边界层。
一般来说,雷诺数增大,机翼表面的层流边界层容易变成絮流边界层。
但是,模型飞机的速度很低,翼弦很小,所以雷诺数不可能增大很大。
要推迟模型飞机失速的发生,就必须要想别的办法。

航模新手入门指南第一章:航模基本原理1.基本原理固定翼模型之所以能飞起来,是因为是因为机翼产生的升力。
机翼的横截面是流线型的,上弧的长度大于下弧的长度。
根据伯努力的流体压力差关系,流速越快受到的压强小,所以,机翼就在气流的作用下产生了一个向上的合力,这就是升力。
2.翼型翼型分为五种:1,平板;2,平凸;3,凹凸;4,双凸;5,s型。
其中最后一种的升力最大。
3.机身机身一般分为板身和仓身两种。
机身的作用主要是连接飞机各部分,调节尾力臂的长度。
尾力臂越长,升降舵和方向舵的舵效越好。
4.尾翼尾翼最主要分为三大类:1垂尾平尾型;2 V型;3无尾翼型。
垂尾平尾型也叫T 型,分为正T型倒T型,以及平尾在垂尾中间的三种情况。
根据垂尾的数量可分为单垂尾,双垂尾和多垂尾三种情况。
V型尾翼分为正V型和倒V型两种。
5.舵面(★重点★)接下来介绍各种舵面的作用。
舵面主要有以下四种:副翼,襟翼,升降舵和方向舵。
在介绍各舵面的作用之前,我先说说模型飞机的三轴,横轴,纵轴,立轴。
纵轴是与机身的几何对称轴,穿过机身;横轴与纵轴垂直且穿过机翼的一条直线;立轴是与上述二者皆垂直的直线。
这三者交与一点,这一点就是模型飞机重力的合力点,即重心。
(以下说明皆以上面的模型俯视图作分析。
)副翼:机翼后面可以上下运动且左右运动方向想反的舵面。
副翼的作用是使飞机绕纵轴做旋转运动。
当活动面左边向上运动,右边向下运动时,由于受到空气阻力,飞机以纵轴向左倾斜,反之向右;(自己空间想象思考一下。
)襟翼:机翼后面靠近内侧的,且只能向下运动且两侧只能同向运动的舵面;襟翼的作用是起降时提高飞机稳定性,降落时减速,也叫空气刹车。
(在我们的航模中少见,因为小型的航模起降的要求低,用不着。
)升降舵:水平尾翼后面可以上下运动的舵面;升降舵使飞机绕横轴做旋转运动,翼面手受阻使飞机上升或下降。
飞行时滑跑一段距离可以轻轻的拉动拉杆一点,保持不动,看着飞机缓慢上升一定高度后松开,防止飞机迅速抬升,受阻,动力又不够而失速;方向舵:垂直尾翼后面可以左右摆动的舵面。
]航模基础第一步,整体设计。
1。
确定翼型。
我们要根据模型飞机的不同用途去选择不同的翼型。
翼型很多,好几千种。
但归纳起来,飞机的翼型大致分为三种。
一是平凸翼型,这种翼型的特点是升力大,尤其是低速飞行时。
不过,阻力中庸,且不太适合倒飞。
这种翼型主要应用在练习机和像真机上。
二是双凸翼型。
其中双凸对称翼型的特点是在有一定迎角下产生升力,零度迎角时不产生升力。
飞机在正飞和到飞时的机头俯仰变化不大。
这种翼型主要应用在特技机上。
三是凹凸翼型。
这种翼型升力较大,尤其是在慢速时升力表现较其它翼型优异,但阻力也较大。
这种翼型主要应用在滑翔机上和特种飞机上。
另外,机翼的厚度也是有讲究的。
同一个翼型,厚度大的低速升力大,不过阻力也较大。
厚度小的低速升力小,不过阻力也较小。
因为我做的是练习机,那就选用经典的平凸翼型克拉克Y了。
因伟哥有一定飞行基础,速度可以快一些,所以我选的厚度是12%的翼型。
实际上就选用翼型而言,它是一个比较复杂、技术含量较高的问题。
其基本确定思路是:根据飞行高度、翼弦、飞行速度等参数来确定该飞机所需的雷诺数,再根据相应的雷诺数和您的机型找出合适的翼型。
还有,很多真飞机的翼型并不能直接用于模型飞机,等等。
这个问题在这就不详述了。
机翼常见的形状又分为:矩形翼、后掠翼、三角翼和纺锤翼(椭圆翼)。
矩形翼结构简单,制作容易,但是重量较大,适合于低速飞行。
后掠翼从翼根到翼梢有渐变,结构复杂,制作也有一定难度。
后掠的另一个作用是能在机翼安装角为0度时,产生上反1-2度的上反效果。
三角翼制作复杂,翼尖的攻角不好做准确,翼根受力大,根部要做特别加强。
这种机翼主要用在高速飞机上。
纺锤翼的受力比较均匀,制作难度也不小,这种机翼主要用在像真机上。
因为我做的是练习机,就选择制作简单的矩形翼。
翼梢的处理。
由于机翼下面的压力大于机翼上面的压力,在翼梢处,从下到上就形成了涡流,这种涡流在翼梢处产生诱导阻力,使升力和发动机功率都会受到损失。

![2024版航模初级培训教程[1]](https://uimg.taocdn.com/023d1a9a77eeaeaad1f34693daef5ef7bb0d125b.webp)
航模培训资料一.航模基本知识1.什么叫航模模型在国际航联制定的竞赛规则里明确规定“航空模型是一种重于空气的,有尺寸限制的,带有或者不带有发动机的,不能载人的航空器,就叫航空模型。
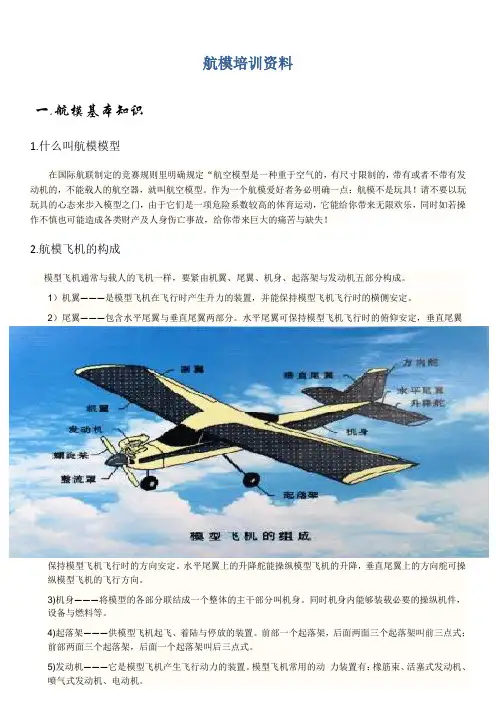
作为一个航模爱好者务必明确一点:航模不是玩具!请不要以玩玩具的心态来步入模型之门,由于它们是一项危险系数较高的体育运动,它能给你带来无限欢乐,同时如若操作不慎也可能造成各类财产及人身伤亡事故,给你带来巨大的痛苦与缺失!2.航模飞机的构成模型飞机通常与载人的飞机一样,要紧由机翼、尾翼、机身、起落架与发动机五部分构成。
1)机翼———是模型飞机在飞行时产生升力的装置,并能保持模型飞机飞行时的横侧安定。
2)尾翼———包含水平尾翼与垂直尾翼两部分。
水平尾翼可保持模型飞机飞行时的俯仰安定,垂直尾翼保持模型飞机飞行时的方向安定。
水平尾翼上的升降舵能操纵模型飞机的升降,垂直尾翼上的方向舵可操纵模型飞机的飞行方向。
3)机身———将模型的各部分联结成一个整体的主干部分叫机身。
同时机身内能够装载必要的操纵机件,设备与燃料等。
4)起落架———供模型飞机起飞、着陆与停放的装置。
前部一个起落架,后面两面三个起落架叫前三点式;前部两面三个起落架,后面一个起落架叫后三点式。
5)发动机———它是模型飞机产生飞行动力的装置。
模型飞机常用的动力装置有:橡筋束、活塞式发动机、喷气式发动机、电动机。
典型的常规飞机通常都具有以上五部分,但在特殊形式的飞机也有例外。
比如弹射与手掷模型滑翔机,就没有动力与起落装置。
3.航空模型的常见术语1).翼展:左右机翼终端两点间的最大直线距离。
2).翼型:机翼或者尾翼的剖面形状。
3).上反角:机翼与模型飞机横轴之间的夹角。
4).安装角:翼弦与机身量度用的基准线的夹角。
5).重心:模型各部分重力的合力点称之重心。
6).前缘:机翼最前面的边缘。
7).尾力臂:由重心到尾翼前缘1/4弦长处的距离。
8).(翼)载荷:每平方米升力面积所承受的(以克为单位的)重量。

中南大学航模协会换届培训——第一环节致航协的各位同学:本次培训资料是本人自己在网上整理的,不涉及任何学术论文,第一环节内容比较详细,不过就我个人看来有些地方说的比较ls,本来想全部删掉,但是涉及各位会员能力不同,所以自己有选择的看吧。
本环节全部内容均为航模基础常识,希望各位同学能打印并全部掌握(基本要求)。
1.有哪几种固定翼(航模与无人机)飞机?怎么确定空速针管的安装位置?从舵面布局的角度出发,有三类固定翼飞机:常规布局(无舵面混控,带有升降舵面、左副翼舵个差动舵面)和V 尾布局(升降方向混控,带有两个差动舵面)。
“舵面”和“混控”的概念参见下文。
其中,无副翼布局(一是没有舵面混控,也没有副翼舵面;二是无混控且有副翼舵面,但闲置不用)也归类为常规布局。
飞翼布局可分为两个子类:飞翼布局带方向舵,飞翼布局不带方向舵。
V 尾布局也可分为两个子类:V 尾布局带副翼,V 尾布局不带副翼。
从螺旋桨的安装位置出发,还可以分为前拉式和背推式两种飞机类型。
上图所示的常规布局机型,螺旋桨装在机头位置,那么它就是前拉式飞机.螺旋桨带起的涡流,会影响空速(即飞机飞行时相对于空气的速度)测量的精确性,而空速针管(空气从此处进入机体内,并作用于飞行控制处理器上的空速传感器)必须与飞机纵轴垂直,指向前方,所以对前拉式飞机而言,空速针管只能装在机翼上。
对背推式飞机,空速针管可以装在机翼上2对背推式飞机,空速针管还可以装在机头空速测量的问题,以后再讲,这里暂时略过。
还有其他分类,如涵道和非涵道等,与固定翼航拍这个主题关联不大,不再赘述。
如需深究,请自行.查阅相关技术资料。
2.什么是舵面?什么是混控?舵面有哪些使用规则?行业习惯:以机头方向为准(即机头为前)来区分前后左右。
对常规布局机型,所谓舵面就是机翼后侧和机尾后侧可以自由转动的部分。
其中升降舵面是水平尾翼后侧的可以上下转动的部分,方向舵面是垂直尾翼后侧的可以左右转动的部分(垂尾在平尾上方,为上单翼飞机,垂尾在平尾下方,为下单翼飞机);左副翼舵面就是左机翼后侧的可以上下转动的部分,右副翼舵面就是右机翼后侧的可以上下转动的部分,一般而言,左右副翼舵面遵守“同时等幅反向转动”的使用规则,即:左副翼舵面以某个转动角向上运动,同时右副翼舵面必须以同等大小的转动角向下运动,左副翼舵面以某个转动角向下运动,同时右副翼舵面必须以同等大小的转动角向上运动。
第一讲航模基础知识一、什么叫航空模型在国际航联制定的竞赛规则里明确规定“航空模型是一种重于空气的,有尺寸限制的,带有或不带有发动机的,不能载人的航空器,就叫航空模型。
其技术要求是:最大飞行重量同燃料在内为五千克;最大升力面积一百五十平方分米;最大的翼载荷100克/平方分米;活塞式发动机最大工作容积10亳升。
1、什么叫飞机模型一般认为不能飞行的,以某种飞机的实际尺寸按一定比例制作的模型叫飞机模型。
2、什么叫模型飞机一般称能在空中飞行的模型为模型飞机,叫航空模型。
二、模型飞机的组成模型飞机一般与载人的飞机一样,主要由机翼、尾翼、机身、起落架和发动机五部分组成。
1、机翼——是模型飞机在飞行时产生升力的装置,并能保持模型飞机飞机飞行时的横侧安定。
2、尾翼——包括水平尾翼和垂直尾翼两部分。
水平尾翼可保持模型飞机飞行时的俯仰安定,垂直尾翼保持模型飞机飞行时的方向安定。
水平尾翼上的升降舵能控制模型飞机的升降,垂直尾翼上的方向舵可控制模型飞机的飞行方向。
3、机身——将模型的各部分联结成一个整体的主干部分叫机身。
同时机身内可以装载必要的控制机件,设备和燃料等。
4、起落架——供模型飞机起飞、着陆和停放的装置。
前部一个起落架,后面两面三个起落架叫前三点式;前部两面三个起落架,后面一个起落架叫后三点式。
5、发动机——它是模型飞机产生飞行动力的装置。
模型飞机常用的动力装置有:橡筋束、活塞式发动机、喷气式发动机、电动机。
三、航空模型技术常用术语1、翼展——机翼(尾翼)左右翼尖间的直线距离。
(穿过机身部分也计算在内)。
2、机身全长——模型飞机最前端到最末端的直线距离。
3、重心——模型飞机各部分重力的合力作用点称为重心。
4、尾心臂——由重心到水平尾翼前缘四分之一弦长处的距离。
5、翼型——机翼或尾翼的横剖面形状。
6、前缘——翼型的最前端。
7、后缘——翼型的最后端。
8、翼弦——前后缘之间的连线。
9、展弦比——翼展与平均翼弦长度的比值。
航模基础知识题库100道及答案(完整版)1. 航模通常指的是()A. 航空模型B. 航海模型C. 航天模型D. 以上都是答案:A2. 以下哪种材料常用于制作航模机身?()A. 木材B. 塑料C. 铝合金D. 以上都是答案:D3. 航模发动机的类型不包括()A. 电动发动机B. 燃油发动机C. 蒸汽发动机D. 太阳能发动机答案:C4. 电动航模常用的电池类型是()A. 镍氢电池B. 镍镉电池C. 锂电池D. 铅酸电池答案:C5. 以下哪种翼型的升力系数较大?()A. 平凸翼型B. 双凸翼型C. 对称翼型D. 凹凸翼型答案:D6. 航模遥控器的通道数量越多,意味着()A. 功能越简单B. 可控制的动作越少C. 操作越复杂D. 价格越低答案:C7. 航模飞机的重心通常位于()A. 机头B. 机尾C. 机翼前缘D. 机翼平均弦长的25% - 30%处答案:D8. 以下哪种控制面用于控制航模飞机的滚转?()A. 副翼B. 升降舵C. 方向舵D. 襟翼答案:A9. 用于增加航模飞机升力的装置是()A. 扰流板B. 缝翼C. 减速板D. 水平安定面答案:B10. 航模螺旋桨的旋转方向通常为()A. 顺时针B. 逆时针C. 视发动机安装位置而定D. 随机答案:C11. 以下哪种材料的航模螺旋桨强度较高?()A. 木质B. 塑料C. 碳纤维D. 铝合金答案:C12. 航模飞机的失速通常是由于()A. 速度过快B. 速度过慢C. 迎角过大D. 迎角过小答案:C13. 以下哪种飞行姿态表示航模飞机正在爬升?()A. 机头向上B. 机头向下C. 机翼向左倾斜D. 机翼向右倾斜答案:A14. 固定翼航模飞机的主要结构包括()A. 机身、机翼、尾翼B. 发动机、螺旋桨、起落架C. 电子设备、控制系统D. 以上都是答案:D15. 航模飞机的翼展是指()A. 机翼前缘到后缘的距离B. 机翼两端的距离C. 机身的长度D. 机翼的面积答案:B16. 以下哪种飞行模式常用于航模初学者练习?()A. 手动模式B. 自稳模式C. GPS 模式D. 无头模式答案:B17. 航模接收机的主要作用是()A. 发送控制信号B. 接收控制信号C. 控制发动机转速D. 测量飞行高度答案:B18. 以下哪种舵机响应速度较快?()A. 数字舵机B. 模拟舵机C. 微型舵机D. 大型舵机答案:A19. 航模飞机的飞行速度通常用()表示。
2.起飞前的准备工作。
首先检查您的遥控器是否已装入8 粒 5 号电池并且确定直升机的电池电力充足(选择适当的飞行场地)3.打开遥控器电源检查电源指示灯(亮)并确定右控制杆(油门)在最下方。
然后接通直升机机身电源(注意机身电源接通后不要立即操作遥控器,飞机保持约5 秒钟不动,保证陀螺仪正常检测锁定。
4.练习时最好先用“青蛙跳”的方法。
首先站离直升机约3 米外的距离,并保证直升机机尾对准您(如果直升机机头对着您,您的操作则是反向)。
慢慢推动油门控制杆让直升机螺旋桨加速旋转,螺旋桨高速旋转产生升力带动直升机慢⋯⋯慢的上升,初飞时操作直升机离地面不要高过 1 米的距离,在此过程中学习控制直升机的飞行方向。
如觉得控制不住时再慢慢的拉下油门控制杆使飞机慢⋯⋯慢着地。
象“青蛙跳”一样反复练习。
5.如果您想在练习的过程中更稳定的操作,推荐使用直升机练习架,练习架可以有效的降低您练习遥控直升机时摔机的损失率,同时帮助您尽快的学会遥控直升机飞行技巧。
理想的情形是在不使直升机摔落时,一边练习一边变得顺手。
6.在练习时常保持遥控直升机与地面完全平行,呈现垂直于地面的起降姿态,并注意着陆的动作。
着陆时让机体稍微稍程往前滑行的方式着陆,尽量避免飞机尾部先落。
手,以下简要介绍了遥控直升机的的飞行原理 ,希望对众多的爱好者有所帮助。
通常的遥控直升机维持飞行的动力,来自于其不断旋转的旋翼。
旋翼旋转产生升力:当旋翼叶片与相对气流之间的角度变大,发动机同时加大功率,旋翼产生的升力大于飞机重量,于是上升;反之,则下降;相同,则处于悬停或平飞状态。
要使遥控直升机前进一般是操纵遥控杆使各桨叶的角度在不同位置时按一定规律变化,旋翼产生的拉力相对于旋转轴向前倾,拉动遥控直升机前进。
使遥控直升机向左或向右飞行也是同样的道理。
平衡翼对灵敏度影响很大,在旋转的过程中,平衡翼因周期性的攻角变化而作周期性的上下细微摆动,平衡翼上下摆动幅度越大,主旋翼攻角差也就越大,攻角差越大,升力差也就越大机体的动作量也越大,而能改变平衡翼上下摆动幅度的就是平衡翼攻角、重量、面积、平衡杆长度平衡翼片中心轴位置、转速... 等,一般情况下大面积、轻量的平衡翼片,重量较轻,陀螺效应越小,越容易上下摆动,拉动的主旋翼角度越大,升力差也就越大,翻滚动作也就越快速。
航模螺旋桨基础知识1(总3页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--一、工作原理可以把螺旋桨看成是一个一面旋转一面前进的机翼进行讨论。
流经桨叶各剖面的气流由沿旋转轴方向的前进速度和旋转产生的切线速度合成。
在螺旋桨半径r1和r2(r1<r2)两处各取极小一段,讨论桨叶上的气流情况。
V—轴向速度;n—螺旋桨转速;φ—气流角,即气流与螺旋桨旋转平面夹角;α—桨叶剖面迎角;β—桨叶角,即桨叶剖面弦线与旋转平面夹角。
显而易见β=α+φ。
空气流过桨叶各小段时产生气动力,阻力ΔD和升力ΔL,见图1—1—19,合成后总空气动力为ΔR。
ΔR沿飞行方向的分力为拉力ΔT,与旋螺桨旋转方向相反的力ΔP 阻止螺旋桨转动。
将整个桨叶上各小段的拉力和阻止旋转的力相加,形成该螺旋桨的拉力和阻止螺旋桨转动的力矩。
从以上两图还可以看到。
必须使螺旋桨各剖面在升阻比较大的迎角工作,才能获得较大的拉力,较小的阻力矩,也就是效率较高。
螺旋桨工作时。
轴向速度不随半径变化,而切线速度随半径变化。
因此在接近桨尖,半径较大处气流角较小,对应桨叶角也应较小。
而在接近桨根,半径较小处气流角较大,对应桨叶角也应较大。
螺旋桨的桨叶角从桨尖到桨根应按一定规律逐渐加大。
所以说螺旋桨是一个扭转了的机翼更为确切。
从图中还可以看到,气流角实际上反映前进速度和切线速度的比值。
对某个螺旋桨的某个剖面,剖面迎角随该比值变化而变化。
迎角变化,拉力和阻力矩也随之变化。
用进矩比“J”反映桨尖处气流角,J =V/nD。
式中D—螺旋桨直径。
理论和试验证明:螺旋桨的拉力(T),克服螺旋桨阻力矩所需的功率(P)和效率(η)可用下列公式计算:T=Ctρn2D4 P=Cpρn3D5 η=J·Ct/Cp 式中:Ct—拉力系数;Cp—功率系数;ρ—空气密度;n—螺旋桨转速;D—螺旋桨直径。
其中Ct和Cp取决于螺旋桨的几何参数,对每个螺旋桨其值随J变化。
学航模零基础系列教程之螺旋桨(一)CattleCattle带您进入航模的世界!Cattle与您一路同行,让我们从今天开始吧!(参考Martin Simons的 Model Aircraft Aerodynamics 4th)螺旋桨效率螺旋桨效率= 有效输出功率/传动轴输入功率 = 推力*速度/功率螺旋桨转动,螺旋桨前被减小的压力使得空气向螺旋桨加速。
若前方来流速度为V,当气流穿过螺旋桨时速度变为V+v。
在螺旋桨后面,由于压力增加,气流加速,因此在螺旋桨后方一定距离,速度进一步增加到V+2v。
滑流速度的增加有一半发生在螺旋桨前,有一半发生在螺旋桨后。
滑流的直径在螺旋桨前后都有收缩。
v与V的比值,飞行速度和通过螺旋桨时流速增量的比非常重要,被称为“入流系数”。
将推力与飞行速度和入流系数联系在一起,可以得到螺旋桨的“理想”效率。
其数值一定小于1.0.效率能达到90%的是非常罕见的。
对于全尺寸飞机螺旋桨和直升机旋翼的直径限制于桨叶桨尖的速度。
如果桨叶桨尖速度接近声速时,效率会下降,会产生很大的应力,噪声也会增加作为旋翼系统的螺旋桨螺旋桨的每片桨叶都是一个旋转的机翼。
桨叶与其扫掠成的圆盘成某个角度,称为桨距,这样它们在解决垂直于旋转面的方向上产生升力。
气动阻力抵制旋转方向运动,产生作用在传动轴上的反作用扭矩。
这一扭矩作用到飞机上,产生使飞机向一侧转动的力,方向取决于螺旋桨转动的方向。
当阻力反作用力矩与发动机的轴扭矩相等时,就达到了给定状态下的最大转速。
一种提高螺旋桨效率的途径是减小桨叶的气动阻力,使得在给定输入功率时可以实现一个更高的转动速率,进而在桨盘后达到一个更大的压力差和更大的推力。
和机翼一样,桨叶的气动阻力分为涡诱导阻力和型阻两个部分。
由于是通过在上下表面间形成的压力差来产生升力,在桨叶的根部和尖部,也就是外侧和内侧的端面都会产生漩涡。
漩涡产生气动阻力,和机翼一样,阻力的大小取决于桨叶的展弦比、平面形状和扭转。
航模螺旋桨基础知识1 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
一、工作原理
二、可以把螺旋桨看成是一个一面旋转一面前进的机翼进行讨论。
流经桨叶
各剖面的气流由沿旋转轴方向的前进速度和旋转产生的切线速度合成。
在螺旋桨半径r1和r2(r1<r2)两处各取极小一段,讨论桨叶上的气流情况。
V—轴向速度;n—螺旋桨转速;φ—气流角,即气流与螺旋桨旋转平面夹角;α—桨叶剖面迎角;β—桨叶角,即桨叶剖面弦线与旋转平面夹角。
显而易见β=α+φ。
三、空气流过桨叶各小段时产生气动力,阻力ΔD和升力ΔL,见图1—1—
19,合成后总空气动力为ΔR。
ΔR沿飞行方向的分力为拉力ΔT,与旋螺桨旋转方向相反的力ΔP 阻止螺旋桨转动。
将整个桨叶上各小段的拉力和阻止旋转的力相加,形成该螺旋桨的拉力和阻止螺旋桨转动的力矩。
四、从以上两图还可以看到。
必须使螺旋桨各剖面在升阻比较大的迎角工
作,才能获得较大的拉力,较小的阻力矩,也就是效率较高。
螺旋桨工作时。
轴向速度不随半径变化,而切线速度随半径变化。
因此在接近桨尖,半径较大处气流角较小,对应桨叶角也应较小。
而在接近桨根,半径较小处气流角较大,对应桨叶角也应较大。
螺旋桨的桨叶角从桨尖到桨根应按一定规律逐渐加大。
所以说螺旋桨是一个扭转了的机翼更为确切。
五、从图中还可以看到,气流角实际上反映前进速度和切线速度的比值。
对
某个螺旋桨的某个剖面,剖面迎角随该比值变化而变化。
迎角变化,拉力和阻力矩也随之变化。
用进矩比“J”反映桨尖处气流角,J=V/nD。
式中D—螺旋桨直径。
理论和试验证明:螺旋桨的拉力(T),克服螺旋桨阻力矩所需的功率(P)和效率(η)可用下列公式计算:
六、T=Ctρn2D4
七、P=Cpρn3D5
八、η=J·Ct/Cp
九、式中:Ct—拉力系数;Cp—功率系数;ρ—空气密度;n—螺旋桨转速;
D—螺旋桨直径。
其中Ct和Cp取决于螺旋桨的几何参数,对每个螺旋桨其值随J变化。
图1—1—21称为螺旋桨的特性曲线,它可通过理论计算或试验获得。
特性曲线给出该螺旋桨拉力系数、功率系数和效率随前进比变化关系。
是设计选择螺旋桨和计算飞机性能的主要依据之一。
十、从图形和计算公式都可以看到,当前进比较小时,螺旋桨效率很低。
对
飞行速度较低而发动机转速较高的轻型飞机极为不利。
例如:飞行速度为72千米/小时,发动转速为6500转/分时,η≈32%。
因此超轻型飞机必须使用减速器,降低螺旋桨的转速,提高进距比,提高螺旋桨的效率。
十一、二、几何参数
十二、直径(D):影响螺旋桨性能重要参数之一。
一般情况下,直径增大拉力随之增大,效率随之提高。
所以在结构允许的情况下尽量选直径较大的螺旋桨。
此外还要考虑螺旋桨桨尖气流速度不应过大(<音速),否则可能出现激波,导致效率降低。
十三、桨叶数目(B):可以认为螺旋桨的拉力系数和功率系数与桨叶数目成正比。
超轻型飞机一般采用结构简单的双叶桨。
只是在螺旋桨直径受到限制时,采用增加桨叶数目的方法使螺旋桨与发动机获得良好的配合。
十四、实度(σ):桨叶面积与螺旋桨旋转面积(πR2)的比值。
它的影响与桨叶数目的影响相似。
随实度增加拉力系数和功率系数增大。
十五、桨叶角(β):桨叶角随半径变化,其变化规律是影响桨工作性能最主要的因素。
习惯上以70%直径处桨叶角值为该桨桨叶角的名称值。
十六、螺距:它是桨叶角的另一种表示方法。
图1—1—22是各种意义的螺矩与桨叶角的关系。
十七、几何螺距(H):桨叶剖面迎角为零时,桨叶旋转一周所前进的距离。
它反映了桨叶角的大小,更直接指出螺旋桨的工作特性。
桨叶各剖面的几何螺矩可能是不相等的。
习惯上以70%直径处的几何螺矩做名称值。
国外可按照直径和螺距订购螺旋桨。
如 64/34,表示该桨直径为60英寸,几何螺矩为34英寸。
十八、实际螺距(Hg):桨叶旋转一周飞机所前进的距离。
可用Hg=v/n 计算螺旋桨的实际螺矩值。
可按H=~粗略估计该机所用螺旋桨几何螺矩的数值。
十九、理论螺矩(HT):设计螺旋桨时必须考虑空气流过螺旋桨时速度增加,流过螺旋桨旋转平面的气流速度大于飞行速度。
因而螺旋桨相对空气而言所前进的距离一理论螺矩将大于实际螺矩。
二十、三、螺旋桨拉力在飞行中的变化
二十一、1.桨叶迎角随转速的变化
二十二、在飞行速度不变的情况下,转速增加,则切向速度(U)增大,进距比减小桨叶迎角增大,螺旋桨拉力系数增大(图1—1—20所示)。
又由于拉力与转速平方成正比,所以增大油门时,可增大拉力。
二十三、2.桨叶迎角随飞行速度的变化:
二十四、在转速不变的情况下,飞行速度增大,进距比加大,桨叶迎角减小,螺旋桨拉力系数减小。
如图1—1—20所示,拉力随之降低。
二十五、当飞行速度等于零时,切向速度就是合速度,桨叶迎角等于桨叶角。
飞机在地面试车时,飞行速度(V)等于零,桨叶迎角最大,一些剖面由于迎角过大超过失速迎角气动性能变坏,因而螺旋桨产生的拉力不一定最大。
二十六、3.螺旋桨拉力曲线:
二十七、根据螺旋桨拉力随飞行速度增大而减小的规律,可绘出螺旋桨可用拉力曲线。
二十八、4.螺旋桨拉力随转速、飞行速度变化的综合情况:
二十九、在飞行中,加大油门后固定。
螺旋桨的拉力随转速和飞行速度的变化过程如下:
三十、由于发动机输出功率增大,使螺旋桨转速(切向速度)迅速增加到一定值,螺旋桨拉力增加。
飞行速度增加,由于飞行速度增大,致使桨叶迎角又开始逐渐减小,拉力也随之逐渐降低,飞机阻力逐渐增大,从而速度的增加趋势也逐渐减慢。
当拉力降低到一定程度(即拉力等于阻力)后,飞机的速度则不再增加。
此时,飞行速度、转速、桨叶迎角及螺旋桨拉力都不变,飞机即保持在一个新的速度上飞行。
三十一、四、螺旋桨的自转:
三十二、当发动机空中停车后,螺旋桨会象风车一样继续沿着原来的方向旋转,这种现象,叫螺旋桨自转。
三十三、螺旋桨自转,不是发动机带动的,而是被桨叶的迎面气流“推着”
转的。
它不但不能产生拉力,反而增加了飞机的阻力。
三十四、从图1—1—24中看出,螺旋桨发生自转时,由于形成了较大的负迎角。
桨叶的总空气动力方向及作用发生了质的变化。
它的一个分力(Q)与切向速度(U)的方向相同,成为推动桨叶自动旋转的动力,迫使桨叶沿原来方向续继旋转:另一个分力(-P)与速度方向相反,对飞行起着阻力作用。
三十五、一些超轻型飞机的发动机空中停车后由于飞行速度较小,产生自旋力矩不能克服螺旋桨的阻旋力矩时螺旋桨不会出现自转。
此时,桨叶阻力较大,飞机的升阻比(或称滑翔比)将大大降低。
三十六、五、螺旋桨的有效功率:
三十七、1.定义:螺旋桨产生拉力,拉着飞机前进,对飞机作功。
螺旋桨单位时间所作功,即为螺旋桨的有效功率。
三十八、公式: N桨=PV
三十九、式中: N桨—螺旋桨的有效功率;P—螺旋桨的拉力;V—飞行速度
四十、2.螺旋桨有效功率随飞行速度的变化:
四十一、(1)地面试车时,飞机没有前进速度(V=0),拉力没有对飞机作功,故螺旋桨的有效功率为“零”。
四十二、(2)飞行速度增大时,从实际测得的螺旋桨有效功率曲线:
四十三、在OA速度范围内,螺旋桨的效功率随飞行速度的增大而增大;
在大于该速度范围后螺旋桨有效功率则随飞行速度的增大而减小。
在OA速度范围内,当飞行速度增大时,拉力减小较慢,随速度的增大,螺旋桨有效功率逐渐提高。
当飞行速度增大到A时,螺旋桨的有效功率最大。
当飞行速度再增大时,由于拉力迅速减小,因此随着飞行速度的增加而螺旋桨有效功率反会降低。
四十四、螺旋桨是发动机带动旋转的,螺旋桨的作用是把发动机的功率转变为拉着飞机前进的有效功率。
四十五、螺旋桨有效功率与发动机输出功率之比,叫螺旋桨效率。
四十六、η=N桨/N有效。