人工鱼群算法的仿真程序-matlab
- 格式:docx
- 大小:16.89 KB
- 文档页数:2

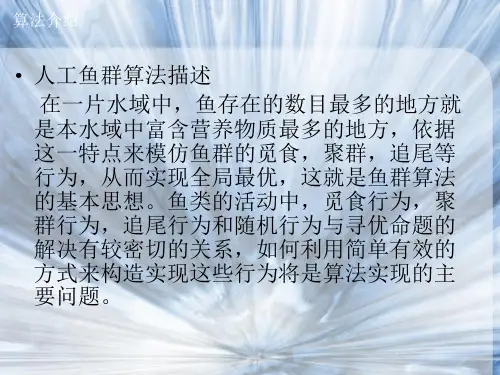

基于多智能体系统的人工鱼群算法研究人工智能领域近年来发展迅速,多智能体系统(Multi-Agent Systems,MAS)作为其中一个研究重点,受到了越来越多的关注。
在MAS中,人工鱼群算法(Artificial Fish Swarm Algorithm,AFSA)是其中一个重要的算法,在优化问题、图像处理、机器学习等领域都得到了广泛应用。
本文将从多智能体系统的角度出发,对人工鱼群算法的研究进行探讨。
一、多智能体系统概述多智能体系统是由多个智能体组成的,这些智能体可以相互通信协作,完成一定的任务。
每个智能体都有自己的意识、思考、行动方式,即使不同智能体之间的行动策略可能有所不同,但是它们能够在一定程度上相互协调,实现共同的目标。
多智能体系统中的智能体可以包括机器人、无人机、传感器、计算节点等,它们之间通过信息交流和决策协作,共同完成一定的任务。
研究多智能体系统的目的不只是因为多智能体具有高度的自适应性和智能性,而且是因为多智能体系统中的协作是人工智能技术在现实世界中的应用之一,这与现实生活中智能化发展的趋势是一致的。
二、人工鱼群算法基础概念人工鱼群算法是基于生物群体智能的优化算法,模拟了鱼群跳跃寻优的行为。
在算法中,鱼个体通过觅食和聚群两种行为方式进行探测和搜索空间,以达到全局最优目标。
与传统遗传算法、粒子群算法、模拟退火算法等计算机智能算法相比,人工鱼群算法更加稳定、鲁棒和易于实现。
人工鱼群算法的基本流程如下:(1)初始化鱼群,确定群体大小和搜索空间范围;(2)根据目标函数,计算每个鱼个体的适应度值;(3)根据当前的适应度值,进行随机游动;(4)根据新位置,更新适应度值;(5)通过聚群行为相互交流学习,提升整个鱼群的性能。
三、基于多智能体系统的人工鱼群算法研究随着智能化技术的发展,多智能体系统的应用越来越广泛,而人工鱼群算法作为其中一个重要的算法,正在受到越来越多的关注。
在多智能体系统中,人工鱼群算法具有以下特点:(1)可以处理多约束优化问题,将局部探测和全局搜索的过程相互分离,提高了算法的收敛速度和搜索精度;(2)适用于不确定性较高的复杂环境下解决问题,例如路径规划、数据聚类等问题;(3)具有良好的鲁棒性,能够适应环境变化和噪声扰动;(4)能够自适应地调整参数,减少了手动调整的复杂性。
淘宝网人工鱼群算法及应用淘宝网人工鱼群算法是一种模拟自然鱼群行为的智能优化算法,它主要应用于淘宝网的推荐系统中。
人工鱼群算法模拟了鱼群觅食行为,通过个体间的交流与合作来寻找最佳解决方案。
淘宝网作为中国最大的电商平台,每天都面临着海量的商品与用户,如何将最合适的商品推荐给用户成为了一个重要的问题。
人工鱼群算法的应用能够有效地解决这个问题。
首先,淘宝网人工鱼群算法通过模拟鱼群觅食行为来寻找最佳解决方案。
在淘宝网的推荐系统中,每个商品可以看作一个虚拟的食物源,每个用户可以看作一个鱼。
人工鱼群算法通过模拟个体的觅食行为来寻找最佳匹配的商品。
鱼群中的每个个体通过觅食行为相互影响,通过正反馈和负反馈的机制,每个个体都能够获取到一定的信息。
其次,淘宝网人工鱼群算法通过个体间的交流与合作来优化推荐结果。
在鱼群中,个体之间会通过信息素的交流来共同优化搜索过程。
这样,每个个体就能够借助其他个体的经验和信息来加速搜索最佳匹配的商品。
而在淘宝网的推荐系统中,用户的行为数据就是一种信息素。
通过分析用户的行为数据,可以将用户划分为不同的群体,并将同一群体中的用户的喜好进行统计分析。
这些统计结果就是交流与合作中的信息素,在人工鱼群算法中被用来引导每个个体的搜索行为。
最后,淘宝网人工鱼群算法通过优化推荐结果来提升用户体验。
在鱼群中,每个个体都会根据自己的目标函数来进行搜索,而目标函数的选择会对搜索效果产生影响。
在淘宝网的推荐系统中,用户的满意度可以作为目标函数,通过优化目标函数来提升用户对推荐结果的满意度。
通过不断地调整目标函数,可以使得推荐系统更加符合用户的需求,提升用户体验。
总之,淘宝网人工鱼群算法是一种模拟自然鱼群行为的智能优化算法,它通过模拟鱼群觅食行为、个体间的交流与合作、优化推荐结果等方式来提升淘宝网的推荐系统。
通过应用人工鱼群算法,淘宝网能够更精准地向用户推荐最合适的商品,提升用户的购物体验。
白鲸优化算法(Whale Optimization Algorithm,WOA)是一种基于鲸鱼社会行为的启发式优化算法。
与其他启发式算法相比,白鲸优化算法具有较快的收敛速度和较高的优化精度,适用于多种优化问题的求解。
而Matlab作为一种功能强大的编程工具,可以用来实现白鲸优化算法,快速求解各种复杂的优化问题。
本文将从以下几个方面介绍白鲸优化算法的原理和在Matlab中的实现:一、白鲸优化算法的原理白鲸优化算法是一种模拟鲸鱼族群行为的优化算法,其核心思想是模拟鲸鱼在觅食过程中的捕食行为。
白鲸在觅食时会根据自身的经验和邻近白鲸的经验来调整自己的行进方向,以寻找最佳的觅食位置。
在算法中,每条白鲸都被看作一个潜在的解,而整个白鲸族群则被看作是一个解空间。
白鲸通过迭代寻找最优解,不断调整自身位置和速度,直到达到最优解或者迭代次数达到预定值。
二、白鲸优化算法的具体步骤1. 初始化白鲸族群:随机生成初始解,即随机生成白鲸的位置和速度。
2. 设定迭代终止条件:设定迭代次数的上限或者设定目标函数值的阈值,以确定算法的终止条件。
3. 更新白鲸位置和速度:根据特定的更新规则,不断调整白鲸的位置和速度,以寻找最优解。
4. 评估适应度:计算每条白鲸的适应度,即目标函数值,以确定是否达到最优解。
5. 确定最优解:根据迭代结果,确定最优解的位置和目标函数值。
三、在Matlab中实现白鲸优化算法在Matlab中,可以利用其强大的算法库和矩阵运算功能,比较容易地实现白鲸优化算法。
下面以一个简单的优化问题为例,介绍在Matlab中如何实现白鲸优化算法。
(这里应该有一段代码示例,以展示在Matlab中实现白鲸优化算法的具体代码)四、使用白鲸优化算法解决实际问题白鲸优化算法可以用来解决各种优化问题,包括函数优化、工程优化、机器学习等领域。
在实际应用中,可以根据具体问题的特点,调整白鲸优化算法的参数和参数设置,来获得更好的优化效果。
五、总结白鲸优化算法是一种较新的启发式优化算法,具有快速的收敛速度和较高的优化精度。
⼈⼯鱼群算法-python实现AFSIndividual.py1import numpy as np2import ObjFunction3import copy456class AFSIndividual:78"""class for AFSIndividual"""910def__init__(self, vardim, bound):11'''12 vardim: dimension of variables13 bound: boundaries of variables14'''15 self.vardim = vardim16 self.bound = bound1718def generate(self):19'''20 generate a rondom chromsome21'''22 len = self.vardim23 rnd = np.random.random(size=len)24 self.chrom = np.zeros(len)25 self.velocity = np.random.random(size=len)26for i in xrange(0, len):27 self.chrom[i] = self.bound[0, i] + \28 (self.bound[1, i] - self.bound[0, i]) * rnd[i]29 self.bestPosition = np.zeros(len)30 self.bestFitness = 0.3132def calculateFitness(self):33'''34 calculate the fitness of the chromsome35'''36 self.fitness = ObjFunction.GrieFunc(37 self.vardim, self.chrom, self.bound)AFS.py1import numpy as np2from AFSIndividual import AFSIndividual3import random4import copy5import matplotlib.pyplot as plt678class ArtificialFishSwarm:910"""class for ArtificialFishSwarm"""1112def__init__(self, sizepop, vardim, bound, MAXGEN, params):13'''14 sizepop: population sizepop15 vardim: dimension of variables16 bound: boundaries of variables, 2*vardim17 MAXGEN: termination condition18 params: algorithm required parameters, it is a list which is consisting of[visual, step, delta, trynum]19'''20 self.sizepop = sizepop21 self.vardim = vardim22 self.bound = bound23 self.MAXGEN = MAXGEN24 self.params = params25 self.population = []26 self.fitness = np.zeros((self.sizepop, 1))27 self.trace = np.zeros((self.MAXGEN, 2))28 self.lennorm = 60002930def initialize(self):31'''32 initialize the population of afs33'''34for i in xrange(0, self.sizepop):35 ind = AFSIndividual(self.vardim, self.bound)36 ind.generate()37 self.population.append(ind)3839def evaluation(self, x):40'''41 evaluation the fitness of the individual42'''43 x.calculateFitness()4445def forage(self, x):46'''47 artificial fish foraging behavior48'''49 newInd = copy.deepcopy(x)50 found = False51for i in xrange(0, self.params[3]):52 indi = self.randSearch(x, self.params[0])53if indi.fitness > x.fitness:54 newInd.chrom = x.chrom + np.random.random(self.vardim) * self.params[1] * self.lennorm * (55 indi.chrom - x.chrom) / np.linalg.norm(indi.chrom - x.chrom)56 newInd = indi57 found = True58break59if not (found):60 newInd = self.randSearch(x, self.params[1])61return newInd6263def randSearch(self, x, searLen):64'''65 artificial fish random search behavior66'''67 ind = copy.deepcopy(x)68 ind.chrom += np.random.uniform(-1, 1,69 self.vardim) * searLen * self.lennorm70for j in xrange(0, self.vardim):71if ind.chrom[j] < self.bound[0, j]:72 ind.chrom[j] = self.bound[0, j]73if ind.chrom[j] > self.bound[1, j]:74 ind.chrom[j] = self.bound[1, j]75 self.evaluation(ind)76return ind7778def huddle(self, x):79'''80 artificial fish huddling behavior81'''82 newInd = copy.deepcopy(x)83 dist = self.distance(x)84 index = []85for i in xrange(1, self.sizepop):86if dist[i] > 0 and dist[i] < self.params[0] * self.lennorm:87 index.append(i)88 nf = len(index)89if nf > 0:90 xc = np.zeros(self.vardim)91for i in xrange(0, nf):92 xc += self.population[index[i]].chrom93 xc = xc / nf94 cind = AFSIndividual(self.vardim, self.bound)95 cind.chrom = xc96 cind.calculateFitness()97if (cind.fitness / nf) > (self.params[2] * x.fitness):98 xnext = x.chrom + np.random.random(99 self.vardim) * self.params[1] * self.lennorm * (xc - x.chrom) / np.linalg.norm(xc - x.chrom) 100for j in xrange(0, self.vardim):101if xnext[j] < self.bound[0, j]:102 xnext[j] = self.bound[0, j]103if xnext[j] > self.bound[1, j]:104 xnext[j] = self.bound[1, j]105 newInd.chrom = xnext106 self.evaluation(newInd)107# print "hudding"108return newInd109else:110return self.forage(x)111else:112return self.forage(x)113114def follow(self, x):115'''116 artificial fish following behivior117'''118 newInd = copy.deepcopy(x)119 dist = self.distance(x)120 index = []121for i in xrange(1, self.sizepop):122if dist[i] > 0 and dist[i] < self.params[0] * self.lennorm:123 index.append(i)124 nf = len(index)125if nf > 0:126 best = -999999999.127 bestIndex = 0128for i in xrange(0, nf):129if self.population[index[i]].fitness > best:130 best = self.population[index[i]].fitness131 bestIndex = index[i]132if (self.population[bestIndex].fitness / nf) > (self.params[2] * x.fitness):133 xnext = x.chrom + np.random.random(134 self.vardim) * self.params[1] * self.lennorm * (self.population[bestIndex].chrom - x.chrom) / np.linalg.norm(self.population[bestIndex].chrom - x.chrom) 135for j in xrange(0, self.vardim):136if xnext[j] < self.bound[0, j]:137 xnext[j] = self.bound[0, j]138if xnext[j] > self.bound[1, j]:139 xnext[j] = self.bound[1, j]140 newInd.chrom = xnext141 self.evaluation(newInd)142# print "follow"143return newInd144else:145return self.forage(x)146else:147return self.forage(x)148149def solve(self):150'''151 evolution process for afs algorithm152'''153 self.t = 0154 self.initialize()155# evaluation the population156for i in xrange(0, self.sizepop):157 self.evaluation(self.population[i])158 self.fitness[i] = self.population[i].fitness159 best = np.max(self.fitness)160 bestIndex = np.argmax(self.fitness)161 self.best = copy.deepcopy(self.population[bestIndex])162 self.avefitness = np.mean(self.fitness)163 self.trace[self.t, 0] = (1 - self.best.fitness) / self.best.fitness164 self.trace[self.t, 1] = (1 - self.avefitness) / self.avefitness165print("Generation %d: optimal function value is: %f; average function value is %f" % (166 self.t, self.trace[self.t, 0], self.trace[self.t, 1]))167while self.t < self.MAXGEN - 1:168 self.t += 1169# newpop = []170for i in xrange(0, self.sizepop):171 xi1 = self.huddle(self.population[i])172 xi2 = self.follow(self.population[i])173if xi1.fitness > xi2.fitness:174 self.population[i] = xi1175 self.fitness[i] = xi1.fitness176else:177 self.population[i] = xi2178 self.fitness[i] = xi2.fitness179 best = np.max(self.fitness)180 bestIndex = np.argmax(self.fitness)181if best > self.best.fitness:182 self.best = copy.deepcopy(self.population[bestIndex])183 self.avefitness = np.mean(self.fitness)184 self.trace[self.t, 0] = (1 - self.best.fitness) / self.best.fitness185 self.trace[self.t, 1] = (1 - self.avefitness) / self.avefitness186print("Generation %d: optimal function value is: %f; average function value is %f" % (187 self.t, self.trace[self.t, 0], self.trace[self.t, 1]))188189print("Optimal function value is: %f; " % self.trace[self.t, 0])190print"Optimal solution is:"191print self.best.chrom192 self.printResult()193194def distance(self, x):195'''196 return the distance array to a individual197'''198 dist = np.zeros(self.sizepop)199for i in xrange(0, self.sizepop):200 dist[i] = np.linalg.norm(x.chrom - self.population[i].chrom) / 6000201return dist202203def printResult(self):204'''205 plot the result of afs algorithm206'''207 x = np.arange(0, self.MAXGEN)208 y1 = self.trace[:, 0]209 y2 = self.trace[:, 1]210 plt.plot(x, y1, 'r', label='optimal value')211 plt.plot(x, y2, 'g', label='average value')212 plt.xlabel("Iteration")213 plt.ylabel("function value")214 plt.title("Artificial Fish Swarm algorithm for function optimization") 215 plt.legend()216 plt.show()运⾏程序:1if__name__ == "__main__":23 bound = np.tile([[-600], [600]], 25)4 afs = AFS(60, 25, bound, 500, [0.001, 0.0001, 0.618, 40])5 afs.solve()ObjFunction见。
Unity 中鱼群复杂行为的算法研究与优化仿真环境下鱼群算法复杂行为分析在虚拟仿真领域,经常会涉及到对一些生物群组行为的虚拟仿真控制,例如在水中游动的鱼群、在天空盘旋的鸟群,以及在特定场景中移动的动物群、人群等。
群组行为的虚拟仿真主要涉及两个方面:一是个体行为的特征模拟,二是群组行为的特征模拟。
个体与个体之间通常会存在随机性的差异化行为,实现个体差异性行为的智能模拟较为容易,但在群组层面,个体的差异性行为则需要得到统一的控制,以避免群组行为的失控。
特别是针对一些特殊行为的控制实现,例如群组的随机行为控制和障碍物的避让路径规划,具体分析如下: 1) 群组中的随机行为一般的鱼群算法所实现的群组移动轨迹都是固定的,群组中节点的行为更新的频率也是固定的,鱼群会在相同的轨迹上一直飞,所有的鱼都会在同一时间变快或者变慢。
但在真实环境中群组移动的轨迹不会一成不变,每个群组成员的行为改变也不可能同时发生,因此模拟群组行为时,增加一些随机行为效果是非常必要的。
2)障碍物的避让行为在真实场景中群组移动经常会遇到各类障碍物,群组就会依据实际情况及时做出避让反应,例如鱼群在水中游动时遇到的礁石,或者其他游动的生物等。
障碍物在场景中的存在形式也各有不同,有些障碍物是静态存在的,这类障碍物在虚拟场景中可以预判到它的存在,那么最简单的方式就是通过预先的路径设定,使群组直接绕开障碍物。
但是还有些障碍物是动态随机出现的,这就需要群组具备实时的碰撞检测功能,并依据检测结果产生相应的避让行为,这也是本研究中鱼群算法改进策略中重点研究的内容之一。
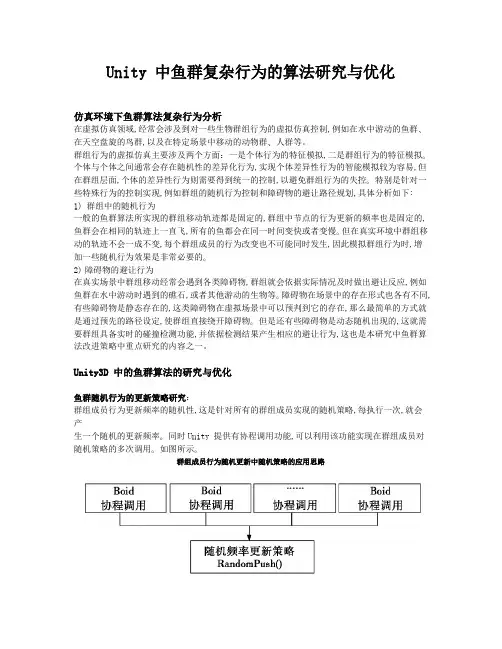
Unity3D 中的鱼群算法的研究与优化鱼群随机行为的更新策略研究:群组成员行为更新频率的随机性,这是针对所有的群组成员实现的随机策略,每执行一次,就会产生一个随机的更新频率。
同时Unity 提供有协程调用功能,可以利用该功能实现在群组成员对随机策略的多次调用。
如图所示。
群组成员行为随机更新中随机策略的应用思路RandomPush()函数的功能,是在整个群组移动过程中,以基于FreqRandom 的频率对PushVel 的值进行更新。
使用MATLAB进行数学建模和仿真的步骤和注意事项随着科技的发展,数学建模和仿真在工程、科学、经济等领域中扮演着至关重要的角色。
MATLAB作为一种强大的数学建模和仿真工具,在各种研究领域都广泛应用。
本文将介绍使用MATLAB进行数学建模和仿真的步骤和注意事项,帮助读者更好地进行数学模型的开发和仿真实验。
一、数学建模的步骤1. 确定问题和目标:首先明确所要解决的问题和需要达到的目标。
这一步是建立数学模型的基础,为后续的步骤提供方向。
2. 收集数据和背景信息:收集与问题相关的数据和背景信息,包括实验数据、文献资料等。
这些信息将作为建模的依据和参考,有助于更好地理解问题和找到解决方案。
3. 建立数学模型:选择合适的数学方法和工具,将问题转化为数学表达式。
根据问题的特点和需求,可以选择不同的数学模型,如代数方程、微分方程、优化模型等。
4. 参数估计和模型验证:根据已有的数据和背景信息,对模型的参数进行估计,并通过实验数据验证模型的准确性和适用性。
如果需要对模型进行修改和改进,可以返回第三步进行调整。
5. 模型求解和分析:使用MATLAB进行模型求解和分析。
根据建立的数学模型,利用数学工具和算法,得到问题的解或结果。
可以使用MATLAB各种内置函数和工具箱,例如符号计算工具箱、优化工具箱等。
6. 结果评估和应用:对模型的结果进行评估和分析,判断模型的有效性和可行性。
根据实际问题的需求,将模型结果应用于实际情况中,提供决策和解决方案。
二、MATLAB数学建模和仿真的注意事项1. 确定合适的数学工具:MATLAB提供了丰富的数学工具和函数,可以满足不同问题的需求。
在建模过程中,需要根据具体的问题特点和要求,选择合适的数学工具和函数。
同时,要善于利用MATLAB的帮助文档和在线资源,充分了解和掌握所使用的函数和工具的功能和使用方法。
2. 数据准备和预处理:良好的数据质量对于建模的准确性和仿真的可靠性至关重要。
78•理论研究•文章编号:1673-887X(2020)07-0078-02基于MATLAB的鱼苗自动计数方法与实现王紫聪,多功昊,张航(天津农学院计算机与信息工程学院,天津300384)摘要在鱼苗养殖的过程中,饲养、运输、销售等环节均需对鱼苗进行定量计数。
传统的人工计数方法费时费力且准确率不高,文章提出了一种基于MATLAB图像处理实现鱼苗自动计数的方法。
首先对鱼苗图像进行灰度化处理,然后对图像进行滤波、去噪、阈值分割等处理,最后实现对鱼苗数量的自动计数。
结果表明,此方法具有较高的准确性。
关键词MATLAB;鱼苗计数;图像处理中图分类号TP391.4文献标志码A doi:10.3969/j.issn.1673-887X.2020.07.034 Automatic Counting Method and Realization of Fish Fry Based on MATLABWang Zicong,Duo Gonghao,Zhang Hang(Tianjin Agricultural University,Colle g el of Computer and Information Engineering,Tianjin300384,China)Abstract:In the process of fish fry breeding,the fish fry needs to be counted in feeding,transportation and sales.The traditional manual counting method is time-consuming,labor-intensive and the accuracy is not high.This paper proposes a method for automatic counting of fish fry based on MATLAB image processing.First,the collected fish fry images are grayed,then image filtering,denoising,threshold segmentation and other processing are performed,and finally the automatic counting of fish fry is achieved.The results show that this method has high accuracy.Key words:MATLAB,fish fry counting,image processing在鱼苗养殖的过程中,饲养、运输、销售等环节都需要对鱼苗进行定量计数。
动物集群运动⾏为模型-19鱼群⾏为的建模与仿真摘要本⽂主要对⼈⼯鱼的集群⾏为,对天敌的有效躲避,和在集群中部分个体获得⾷物信息的情况下,整个鱼类集群的运动⾏为进⾏了研究。
并利⽤MATLAB ⼯具进⾏了模拟仿真。
针对问题⼀,我们对鱼类的集群运动主要提出了聚集、和邻居速度匹配、避免碰撞三个原则。
基于这三个原则建⽴了鱼类单个个体的⾃治模型,每个个体通过相互作⽤,使集群形成。
本⽂对三个原则的具体实现进⾏了分析和假设。
得到了计算机模拟仿真下的鱼类集群图形。
针对问题⼆,在模型⼀的基础上,我们增加了鱼群有效逃避天敌的规则。
并利⽤MATLAB进⾏在天敌存在的情况下,鱼类集群⾏为的运动特征,并且得出了较好的仿真结果。
针对问题三,我们建⽴了鱼群觅⾷过程中的信息交流机制,得出了在部分⼈⼯鱼知悉⾷物信息的情况下,整个鱼群的运动状态的仿真结果。
关键词:集群运动模拟仿真个体⾃治⼀、问题的提出在动物界,⼤量集结成群进⾏移动或者觅⾷的例⼦并不少见,这种现象在⾷草动物、鸟、鱼和昆⾍中都存在。
这些动物群在运动过程中具有很明显的特征:群中的个体聚集性很强,运动⽅向、速度具有⼀致性。
通过数学模型来模拟动物群的集群运动⾏为以及探索动物群中的信息传递机制⼀直是仿⽣学领域的⼀项重要内容。
根据相关资料,建⽴数学模型刻画动物集群运动、躲避威胁等⾏为,解决如下问题:问题⼀:建⽴数学模型模拟动物的集群运动。
问题⼆:建⽴数学模型刻画鱼群躲避⿊鳍礁鲨鱼的运动⾏为。
问题三:假定动物群中有⼀部分个体是信息丰富者(如掌握⾷物源位置信息,掌握迁徙路线信息),请建模分析它们对于群运动⾏为的影响,解释群运动⽅向决策如何达成。
⼆、基本假设1、假设除视觉外其他感官在第⼀问中的影响忽略,如嗅觉,听觉;2、假设每条鱼体型、感知能⼒相同;3、假设鱼群在集群运动中没有死亡;4、假设鱼的反应速度很快,改变速度所需时间⾮常短;5、假设鱼遇到边界,以反射的⽅向反弹。
三、定义符号说明四、问题的分析及模型的建⽴、求解4.1 对于问题⼀4.1.1 问题的分析关于集群⾏为的研究,⼤致可以分为三个阶段:第⼀阶段是⽣物学家做了⼤量研究,发现了许多⽣物群体特有的动态⾏为;第⼆阶段是实验物理学家和计算机专家做了许多实验和仿真,⽤模拟仿⽣的⽅法证明这种⽣物群体现象可以由个体的简单⾏为规律获得;第三阶段就是利⽤数学对群集⾏为进⾏严格建模及分析。
鱼群集群行为的的建模与仿真摘要本文利用人工生命技术的特点,把每条鱼看成是一个能够自主决策的Agent,它们会根据自己的观察来感知周围的环境,并按照一定的规则决策。
然后采用自底向上的建模方法,根据鱼群游动的规律建立了一种基于群体中每个个体运动方程的数学模型, 并通过matlab算法设计各种运算, 从而完成整个鱼群游动的模拟。
对于问题一,首先我们确定鱼群游动的三个规则:凝聚性(向心性),同向性,排斥性;然后根据这三个规则,建立了群体中每个个体的运动方程,最后通过matlab实现对鱼群集群运动的模拟。
对于问题二,首先我们将刻画鱼群躲避黑鳍礁鲨鱼的运动行为一般化,将其作为刻画鱼群躲避捕食者的运动行为来研究。
然后我们将捕食者看成是鱼群中的特殊鱼(对所有其它鱼只有排斥力而没有吸引力,所有其它鱼对其只有吸引力而没有排斥力),然后再运用问题一所建立的模型进行模拟刻画。
对于问题三,首先我们将鱼群中的鱼分为普通鱼与信息鱼(信息丰富者),并假设在运动过程中普通鱼会向信息鱼靠拢。
然后通过问题一中的模型进行仿真,并研究了当信息鱼的比例为不同值时的情况,从而分析了信息鱼对于群运动行为的影响及解释群运动方向决策是如何达成的。
关键词: 集群运动人工生命仿真 Matlab编程1 问题重述在生态系统中,动物个体的行为相对简单,集群后却能表现出复杂的群体行为。
这些动物群在运动过程中具有很明显的特征:群中的个体聚集性很强,运动方向、速度具有一致性。
请查阅相关资料,思考动物集群运动的机理,建立数学模型刻画动物集群运动、躲避威胁等行为,例如,可以考虑以下问题的分析建模:(1)建立数学模型模拟动物的集群运动。
(2)建立数学模型刻画鱼群躲避黑鳍礁鲨鱼的运动行为。
(3)假定动物群中有一部分个体是信息丰富者(如掌握食物源位置信息,掌握迁徙路线信息),请建模分析它们对于群运动行为的影响,解释群运动方向决策如何达成。
2 模型的假设与符号的约定2.1模型的假设与说明(1)所有的鱼生活在一个宽为width、长length的二维世界。
基于人工鱼群算法的多元线性回归分析问题处理李媛【摘要】人工鱼群算法(AFsA)是一种基于动物行为的自治体寻优模式,依据鱼类活动特点构建的新型智能仿生算法.简要介绍了AFSA算法的基本原理,描述了使用AFSA算法解决多元线性回归分析问题的步骤和结果.仿真实验结果表明,AFSA算法在处理多元线性回归分析问题上是一种简单、高效的算法.%A brief introduction is made of the basic principles of Artificial Fish Swarm Algorithm (AFSA), a new algorithm with autonomous optimization mode according to the behavior of fish swarm. The steps are analyzed for the solution to problems concerning AFSA - based multiple linear regression analysis. The simulation experiment proves that it is simple and efficient.【期刊名称】《渤海大学学报(自然科学版)》【年(卷),期】2011(032)002【总页数】4页(P168-171)【关键词】人工鱼群;优化;多元线性回归分析【作者】李媛【作者单位】渤海大学工学院,辽宁锦州,121013【正文语种】中文【中图分类】TP2740 引言多元线性回归问题就是在很多工程技术和科学实验的实际问题中,用来讨论多个变量之间试验结果的数学表示。
它在实验数据处理、经验公式求得、仪器的精度分析及自动控制中的数学模型的制定中都有很广泛的应用。
解决多元线性回归分析问题的重点就是多个参数估计。
目前,可以采用传统的最小二乘法〔1〕;也可以采用遗传算法(GA)〔1〕或粒子群优化算法(PSO)〔2〕等智能算法解决此类问题。
ticfigure(1);hold onezplot('x*sin(10*pi*x)+2',[-1,2]);%% 参数设置fishnum=50; %生成50只人工鱼MAXGEN=50; %最多迭代次数try_number=100;%最多试探次数visual=1; %感知距离delta=0.618; %拥挤度因子step=0.1; %步长%% 初始化鱼群lb_ub=[-1,2,1];X=AF_init(fishnum,lb_ub);LBUB=[];for i=1:size(lb_ub,1)LBUB=[LBUB;repmat(lb_ub(i,1:2),lb_ub(i,3),1)];endgen=1;BestY=-1*ones(1,MAXGEN); %每步中最优的函数值BestX=-1*ones(1,MAXGEN); %每步中最优的自变量besty=-100; %最优函数值Y=AF_foodconsistence(X);while gen<=MAXGENfprintf(1,'%d\n',gen)for i=1:fishnum%% 聚群行为[Xi1,Yi1]=AF_swarm(X,i,visual,step,delta,try_number,LBUB,Y);%% 追尾行为[Xi2,Yi2]=AF_follow(X,i,visual,step,delta,try_number,LBUB,Y);if Yi1>Yi2X(:,i)=Xi1;Y(1,i)=Yi1;elseX(:,i)=Xi2;Y(1,i)=Yi2;endend[Ymax,index]=max(Y);figure(1);plot(X(1,index),Ymax,'.','color',[gen/MAXGEN,0,0])if Ymax>bestybesty=Ymax;bestx=X(:,index);BestY(gen)=Ymax;[BestX(:,gen)]=X(:,index);elseBestY(gen)=BestY(gen-1);[BestX(:,gen)]=BestX(:,gen-1);endgen=gen+1;endplot(bestx(1),besty,'ro','MarkerSize',100) xlabel('x')ylabel('y')title('鱼群算法迭代过程中最优坐标移动') %% 优化过程图figureplot(1:MAXGEN,BestY)xlabel('迭代次数')ylabel('优化值')title('鱼群算法迭代过程')disp(['最优解X:',num2str(bestx,'%1.5f')]) disp(['最优解Y:',num2str(besty,'%1.5f')]) toc。
tic
figure(1);hold on
ezplot('x*sin(10*pi*x)+2',[-1,2]);
%% 参数设置
fishnum=50; %生成50只人工鱼
MAXGEN=50; %最多迭代次数
try_number=100;%最多试探次数
visual=1; %感知距离
delta=0.618; %拥挤度因子
step=0.1; %步长
%% 初始化鱼群
lb_ub=[-1,2,1];
X=AF_init(fishnum,lb_ub);
LBUB=[];
for i=1:size(lb_ub,1)
LBUB=[LBUB;repmat(lb_ub(i,1:2),lb_ub(i,3),1)];
end
gen=1;
BestY=-1*ones(1,MAXGEN); %每步中最优的函数值
BestX=-1*ones(1,MAXGEN); %每步中最优的自变量
besty=-100; %最优函数值
Y=AF_foodconsistence(X);
while gen<=MAXGEN
fprintf(1,'%d\n',gen)
for i=1:fishnum
%% 聚群行为
[Xi1,Yi1]=AF_swarm(X,i,visual,step,delta,try_number,LBUB,Y);
%% 追尾行为
[Xi2,Yi2]=AF_follow(X,i,visual,step,delta,try_number,LBUB,Y);
if Yi1>Yi2
X(:,i)=Xi1;
Y(1,i)=Yi1;
else
X(:,i)=Xi2;
Y(1,i)=Yi2;
end
end
[Ymax,index]=max(Y);
figure(1);
plot(X(1,index),Ymax,'.','color',[gen/MAXGEN,0,0])
if Ymax>besty
besty=Ymax;
bestx=X(:,index);
BestY(gen)=Ymax;
[BestX(:,gen)]=X(:,index);
else
BestY(gen)=BestY(gen-1);
[BestX(:,gen)]=BestX(:,gen-1);
end
gen=gen+1;
end
plot(bestx(1),besty,'ro','MarkerSize',100) xlabel('x')
ylabel('y')
title('鱼群算法迭代过程中最优坐标移动') %% 优化过程图
figure
plot(1:MAXGEN,BestY)
xlabel('迭代次数')
ylabel('优化值')
title('鱼群算法迭代过程')
disp(['最优解X:',num2str(bestx,'%1.5f')]) disp(['最优解Y:',num2str(besty,'%1.5f')]) toc。