基于改进遗传算法优化的气动盾形闸门模糊PID控制研究
- 格式:pdf
- 大小:920.44 KB
- 文档页数:4

基于改进遗传算法的模糊pid控制器设计
随着现代社会的发展,自动控制技术在各个领域的应用越来越广泛,
其中模糊PID控制器的应用也越来越普遍。
模糊PID控制器是一种基
于模糊控制理论的控制器,它具有良好的抗干扰能力和自适应性,可
以有效地提高系统的稳定性和性能。
然而,由于模糊PID控制器的参
数设置比较复杂,传统的参数设置方法往往无法得到最优的控制效果。
为了解决这一问题,研究人员提出了基于改进遗传算法的模糊PID控
制器设计方法。
该方法首先将模糊PID控制器的参数设置问题转化为
一个优化问题,然后利用改进的遗传算法对模糊PID控制器的参数进
行优化设置,以获得最优的控制效果。
改进的遗传算法是一种基于遗传算法的优化算法,它结合了遗传算法
和粒子群算法的优点,具有较强的搜索能力和收敛速度。
它可以有效
地搜索出最优的参数设置,从而提高模糊PID控制器的控制效果。
此外,基于改进遗传算法的模糊PID控制器设计方法还具有计算效率高、收敛速度快等优点,可以有效地提高模糊PID控制器的控制效果。
综上所述,基于改进遗传算法的模糊PID控制器设计方法具有良好的
搜索能力和收敛速度,可以有效地提高模糊PID控制器的控制效果,
为现代社会的自动控制技术的发展提供了有力的支持。
收稿日期:2009-04-27作者简介:乔志杰(1983-),男,安徽固镇人,安徽电子信息职业技术学院,硕士,教师。
基于遗传算法优化的模糊PID 控制研究及其仿真乔志杰1,程翠翠2(1.安徽电子信息职业技术学院,安徽 蚌埠 233000;2.蚌埠机电工程学校,安徽 蚌埠 233000)摘 要:本文提出了一种基于遗传算法优化的模糊PI D 控制系统:采用遗传算法优化模糊控制中的隶属函数和控制规则,进一步完善了模糊PI D 控制器的性能,提高了系统的控制精度。
最后对优化后的模糊控制器进行了M atlab 仿真研究,仿真结果表明:经过优化后的控制器明显地改善了控制系统的动态性能,能使系统达到满意的控制效果,对进一步应用研究具有较大的参考价值。
关键词:MATLAB ;模糊PI D 控制;遗传算法;仿真中图分类号:TP273 文献标识码:A 文章编号:1672-9706(2009)03-0098-05R esearch on Opti m ization of Fuzzy PI D Control Basedon G enetic A lgorith m and Its Si m ulationQIAO Zhi -J ie 1,CHENG Cui -cui2(1.Anhui Vocational C ollege o f E lectronic&Infor m ation Technology,B engbu 233000,China;2.B engbu School of M echanical&E lectric E ng ineering,B engbu 233000,China )Abst ract :In th is paper ,a k i n d of opti m izati o n of fuzzy PI D con tro l syste m based on Genetic A lgorith m is discussed:The using o fGenetic A l g orith m to opti m ize the m e m bersh i p functi o n and contro l r u les o f fuzzy contro l syste m perfects the pr operties o f fuzzy PI D contro ller and i m proves the precisi o n o f control syste m.A t l a s,t theMATLAB si m ulati o n o f opti m ized fuzzy PI D contro l syste m is carried ou.t The result of si m u -lation ind i c ated that the opti m ized control syste m i m proves the dyna m ic pr operty .It can g i v e a good con -tro l perfor m ance and has a h i g h reference value for further applicati o ns .K ey w ords :MATLAB ;fuzzy PI D contro;l Genetic A l g orith m;si m u lati o n0 引言众所周知,模糊控制是当今控制领域中令人瞩目的新的控制方法和技术,它无需建模,只通过把专家的经验和控制策略总结成若干规则,采用简便、快速、灵活的手段,来完成那些用经典和现代控制难以实现的自动化和智能化的目标,因而在多个领域中得到越来越广泛的应用。

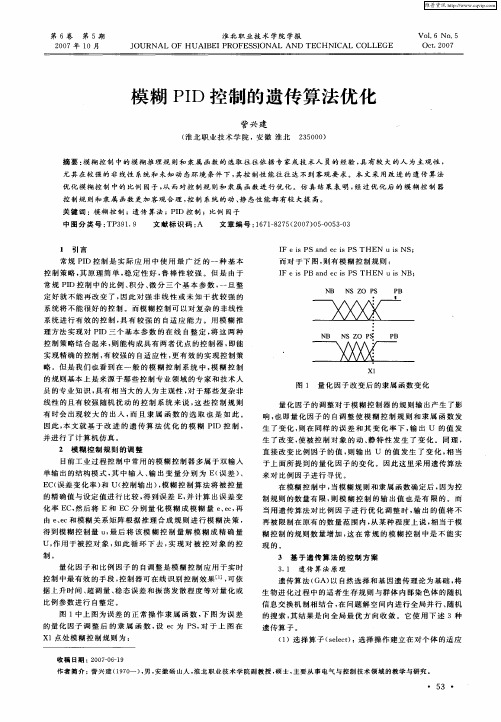
模糊控制具有能够适用于复杂工况等特性,在各个领域得到了广泛的应用[1]。
一个模糊控制系统的控制效果,在一定程度上取决于规则表的建立和隶属度函数的选取,选取得好会使控制系统适应复杂的工业过程[2]。
传统选取规则表的方式,大多是根据工业知识、专家经验等,但因为经验的差异性使得规则表和隶属度函数的选取大相径庭,难以推广,并且过程繁琐。
因此,模糊控制领域学者关注的重点一般都在如何对模糊规则和隶属度函数进行优化上。
Karr C L和Gentry E J早在1993年就进行了隶属度函数问题方面的研究,其主要的成果是采用SGA(简单遗传算法)对论域中语言变量的模糊集进行重新设定,构成了自适应控制系统[3]。
Buckley J J认为可以优先确定隶属度函数的形状,如矩形、三角形等,然后对构成这些形状的参数进行寻优[4]。
此外,Thrift P则是在固定隶属度函数的前提下,对整个模糊规则库进行寻优[5]。
屈文忠和邱阳针对多变量模糊控制系统,提出采用遗传算法来设计模糊规则,这种方法不但适合非常复杂的控制系统,同时也能提高模糊控制器的鲁棒性[6]。
张景元通过对遗传算法的改进,使得模糊控制系统能够在一定程度上实现规则表的自适应,并且控制效果较理想[7]。
董海鹰等的研究则侧重于基于多种群的变论域方面,也实现了模糊规则的自整定[8]。
以上研究成果的不局限性是在优化过程中分别对隶属度函数和模糊控制规则进行单独处理,没有考虑到二者之间存在的内在联系,割裂后的二者只能代表模糊控制器的一部分,因此上述方法通常只是做到了局部最优。
与上述研究不同的是,Homaifar A和McCormick E首次同时考虑隶属度函数和规则表[9],但是却没有考虑到在进化进程中以及初始设置时可能出现的规则相互矛盾的问题,并且在整个整定过程中同时有可能出现某些值域没有被覆盖的现象,导致产生失控点。
笔者结合现有的研究成果,兼顾隶属度函数和规则表,提出了一种新的寻优算法。

第19卷 第3期2006年6月传感技术学报CHIN ES E JOURNAL OF S ENSORS AND ACTUA TORSVol.19 No.3J un.2006N eural N et work PID Control Method and Its Application on OptimizationW U X i ao 2j i ng(I nf .Tech.&S ci.S chool ,Zhanj iang N ormal College ,Zhanj iang Guang dong 524048,China )Abstract :Considering t he fact t hat t he initial value of neural network PID controller affected t he system performance ,a neural network PID cont rol met hod based on parameters optimization via modified GA is p resented ,in which parameters of t he PID cont roller are optimized off 2line using GA ,t he result of optimi 2zation is regarded as initial value of p roportion ,integral and differential.The neural network PID control system is devised according to t he above met hod.The experimental result s to level process indicate t hat t he proposed app roach possesses satisfactory stability and robust ness.K ey w ords :Genetic algorit hm (GA );neural network ;PID cont roller ;level process EEACC :1293基于改进遗传算法寻优的神经网络PID 控制及应用伍筱菁(湛江师范学院信息科技学院,广东湛江524048)收稿日期:2005210212作者简介:伍筱菁(19642)女,硕士,高级工程师,研究方向为电气自动化及其应用,ls 2wxj @摘 要:根据神经网络PID 控制器初值的选取影响系统控制性能的特点,提出了一种基于改进遗传算法寻优的神经网络PID 控制方法。
基于遗传算法优化的模糊pid控制研究及其仿真随着工业生产自动化和精密控制的发展,PID控制器已成为控制系统中最常用的控制技术之一。
传统的PID控制方法具有一定的稳定性和可靠性,但也存在一定的缺陷,例如参数设置困难、优化效率低等问题。
为了解决这些问题,研究人员提出了基于遗传算法的模糊PID控制研究方法。
遗传算法是一种以自然选择为基础的模仿自然进化和模拟计算思想,由John Holland于1960年代提出,它能够自动调节参数并为优化问题提供有效解决方案。
它大大简化了传统PID控制中的参数设定和优化过程,使PID控制系统更加精确和可靠。
方法基于遗传算法的模糊PID控制研究方法,主要分为以下几个步骤:(1)首先,根据模糊控制的原理,为模糊PID控制器设定优化目标。
(2)确定遗传算法的迭代次数和基因池的大小。
(3)根据模糊逻辑和技术,使用遗传算法的特性建立一个模糊系统,利用遗传算法计算模糊系统参数。
(4)将计算出的参数应用到PID控制器中,进行系统仿真。
(5)根据仿真结果,对模糊系统参数进行调整,使系统性能更加稳定可靠。
结果和讨论通过基于遗传算法的模糊PID控制研究,可以得到较佳的控制系统参数,使系统稳定性和可靠性得到很大的提高。
仿真结果表明,基于遗传算法优化的模糊PID控制器在系统参数设置和稳定性方面有着良好的优势。
结论是,在工业生产自动化和精密控制中,基于遗传算法优化的模糊PID控制是一种有效的控制策略,它能够有效改善系统性能,提高系统稳定性和可靠性。
结论基于遗传算法优化的模糊PID控制是一种有效的控制策略,能够提高其稳定性和可靠性,从而有效改善系统性能。
但是,需要指出的是,以上研究主要集中在参数设计和优化上,而对系统动态和实时应用方面尚未有深入研究,仍有许多工作需要去完善。
基于遗传算法优化的模糊PID-Smith控制方法的研究的开题报告一、选题背景PID控制器是工业中最为广泛应用的控制方法之一,具有结构简单、易于实现、调节简便等优点。
但传统PID控制器具有参数调节困难、容易出现超调等缺点,不能满足大多数控制系统需求。
因此,近年来研究者在传统PID控制器的基础上进行改进,其中模糊PID控制是一种较有代表性的改进型PID控制器之一。
模糊PID控制器能够较好地对系统的动态性能进行控制,能够在不确定或不清楚系统模型情况下进行控制,但控制性能仍不尽人意。
Smith预估补偿技术能够改善模糊PID控制器的动态响应和鲁棒性能,但又带来了新的参数调节问题,降低了实际工程应用的实用性。
因此,本研究拟在模糊PID控制器的基础上,引入遗传算法类优化算法,快速求解参数优化问题,进一步改善模糊PID-Smith控制器的控制性能,使之能够更好地应用于实际工程中。
二、研究内容本研究将围绕模糊PID-Smith控制器进行深入研究,重点包括以下内容:1. 模糊PID-Smith控制器原理及动态性能研究,建立控制器动态模型;2. 遗传算法及其变种算法的原理、评价方法、遗传基因编码方案、交叉操作、变异操作等进行总结并掌握;3. 将遗传算法类优化算法引入模糊PID-Smith控制器的参数优化中,提高优化速度和精度;4. 设计算法实验平台,通过仿真实验以及实际控制实验来进行实验验证研究成果。
三、研究意义通过本研究,能够将优化算法引入模糊PID-Smith控制器中,实现控制性能的最优化,大大提高控制系统的性能,降低了调试难度,使之能够更好地应用于实际工程中。
四、研究方法本研究主要采取理论分析和实验验证相结合的方法。
首先,对模糊PID-Smith控制器和遗传算法进行Matlab仿真,验证理论后,利用LabVIEW平台建立实际硬件系统,进行控制实验,验证算法的实用性和可行性。
五、预期成果本研究通过理论分析和实验验证,获得以下预期成果:1. 深入研究模糊PID-Smith控制器的原理及动态性能,建立控制器动态模型;2. 总结遗传算法及其变种算法的原理、评价方法、遗传基因编码方案、交叉操作、变异操作等,设计遗传算法类优化算法;3. 提出将遗传算法类优化算法引入模糊PID-Smith控制器的参数优化中,实现控制性能的最优化,提高约束控制系统控制性能;4. 设计算法实验平台,通过仿真实验以及实际控制实验来进行实验验证研究成果。
一种遗传算法优化模糊PID控制器的设计与仿真遗传算法是一种模拟生物进化过程的优化算法,通过模拟生物的自然选择和遗传交叉等过程,不断优化目标函数,达到寻找最优解的目的。
PID控制器是最常用的控制器之一,但是其参数的调节通常需要依靠经验或者试错法。
利用遗传算法优化模糊PID控制器的设计可以大大减少这种调参的耗时,并且可以获得更优的控制效果。
首先,在设计模糊PID控制器前,我们需要明确控制对象的模型和控制目标。
控制对象可以是任何具有反馈机制的系统,如机械控制系统、电子控制系统等。
控制目标可以是任何我们希望达到的状态,比如保持温度稳定、保持速度恒定等等。
接下来,我们需要确定需要优化的PID控制器的参数范围。
PID控制器有三个参数:比例增益Kp、积分增益Ki和微分增益Kd。
我们需要确定这三个参数的合理取值范围。
一般情况下,Kp和Ki的范围可以在0到10之间,而Kd的范围也可以在0到10之间。
然后,我们需要定义适应度函数。
适应度函数用于衡量每个个体的优劣程度。
在模糊PID控制器的设计中,适应度函数可以是控制器的误差指标,比如稳态误差、超调量等等。
我们希望优化的结果是最小化这些指标,因此适应度函数应该是一个相反的函数。
接下来,我们需要确定遗传算法的参数。
遗传算法的参数包括种群大小、交叉率、变异率等等。
种群大小决定了算法的空间大小,一般情况下设为几十到几百个个体。
交叉率和变异率决定了交叉和变异的概率,一般情况下设为0.8和0.1然后,我们需要编写遗传算法的代码。
遗传算法的代码可以使用任何编程语言来实现,如Python、Matlab等等。
在编写代码时,我们需要注意以下几点:首先,需要实现种群的初始化,可以使用随机数生成初始种群;其次,需要实现适应度函数的计算,根据控制目标计算每个个体的适应度;最后,需要实现选择、交叉和变异的操作,并根据适应度函数进行优化。
最后,我们需要进行仿真实验。
在仿真中,我们可以使用Matlab或者其他仿真软件来搭建控制对象的模型和控制系统,并将优化后的PID控制器与传统PID控制器进行比较。
基于遗传算法的模糊控制器参数优化研究在现代工业领域,控制系统是非常重要的一部分,而模糊控制器是其中的一种非线性控制系统。
模糊控制器的优化是一个非常关键的问题,因为它的控制能力直接影响到工业应用的性能和效果。
而遗传算法可以通过模拟基因的变化来优化模糊控制器的参数,从而提升其控制性能。
本文将探讨基于遗传算法的模糊控制器参数优化的研究。
一、模糊控制器的基本原理模糊控制器是一种非线性控制系统,通过模糊逻辑模型的建立,将输入量映射到输出量上,在不知道系统的确切参数的情况下能够进行控制。
其基本原理是将输入量和输出量映射到一个模糊集合中,通过模糊集合之间的关系进行计算,最终得出控制命令。
二、遗传算法的基本原理遗传算法是模拟生物进化原理的一种计算机算法,通过选择、交叉和变异等操作来模拟进化过程,从而寻找最优的参数组合。
遗传算法将问题看作一组参数的空间,通过不断的优化这些参数,来求解问题的最优解。
三、基于遗传算法的模糊控制器参数优化在优化模糊控制器参数时,遗传算法是一种非常有效的方法。
首先,需要确定参数的优化目标,例如控制系统的响应时间、稳定性等等。
然后,需要将参数映射到一个编码中,这可以使用二进制编码、格雷编码等方式进行。
接着,在遗传算法的迭代过程中,通过选择、交叉和变异等操作对基因进行修改,生成新的一代个体,并计算每个个体的适应度值。
最终,通过精英选择等策略,挑选出适应度最高的个体,即为最优参数组合。
四、基于遗传算法的模糊控制器参数优化实例为了更好地说明基于遗传算法的模糊控制器参数优化过程,下面给出一个实例如下:假设有一个二极管温度控制系统,需要优化模糊控制器的两个参数Kp和Ki。
首先,我们需要确定优化目标是使得控制系统的温度响应时间尽可能短。
其次,将Kp和Ki分别映射到二进制编码中,假设Kp编码为10100101,Ki编码为01011010。
接着,通过选择、交叉和变异等操作产生下一代基因,例如选择操作选择了前两个适应度最高的个体,交叉操作以Kp的第5位和Ki的第4位为界点,交叉而得到新的两个个体,变异操作将Kp的第7位和Ki的第2位进行取反。