b样条曲线曲面
- 格式:ppt
- 大小:128.00 KB
- 文档页数:16
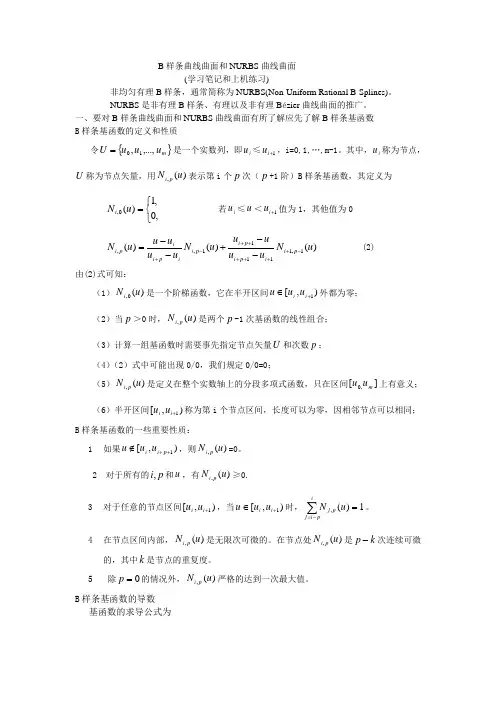
B 样条曲线曲面和NURBS 曲线曲面(学习笔记和上机练习)非均匀有理B 样条,通常简称为NURBS(Non-Uniform Rational B-Splines)。
NURBS 是非有理B 样条、有理以及非有理B ézier 曲线曲面的推广。
一、要对B 样条曲线曲面和NURBS 曲线曲面有所了解应先了解B 样条基函数 B 样条基函数的定义和性质令{}m u u u U ,...,,10=是一个实数列,即i u ≤1+i u ,i=0,1,…,m-1。
其中,i u 称为节点,U 称为节点矢量,用)(,u N p i 表示第i 个p 次(p +1阶)B 样条基函数,其定义为⎩⎨⎧=,0,1)(0,u N i 若i u ≤u <1+i u 值为1,其他值为0 )()()(1,11111,,u N u u u u u N u u u u u N p i i p i p i p i i p i ip i -++++++-+--+--= (2)由(2)式可知:(1))(0,u N i 是一个阶梯函数,它在半开区间),[1+∈i i u u u 外都为零; (2)当p >0时,)(,u N p i 是两个p -1次基函数的线性组合;(3)计算一组基函数时需要事先指定节点矢量U 和次数p ; (4)(2)式中可能出现0/0,我们规定0/0=0;(5))(,u N p i 是定义在整个实数轴上的分段多项式函数,只在区间][,0m u u 上有意义; (6)半开区间),[1+i i u u 称为第i 个节点区间,长度可以为零,因相邻节点可以相同; B 样条基函数的一些重要性质:1 如果),[1++∉p i i u u u ,则)(,u N p i =0。
2 对于所有的p i ,和u ,有)(,u N p i ≥0.3 对于任意的节点区间),[1+i i u u ,当),[1+∈i i u u u 时,∑-==ipi j pj u N1)(,。
第二章三维形态基本建模方法第一节形体的空间定位及表示方法一、空间、物体和结构我们每天的生活发生在三维环境中,而且充满着三维物体,我们总是看到、感到三维。
当设计实体模型时,我们通常认为许多事情理所当然。
但在用计算机对三维场景模型化时,那么我们不得不熟悉大量的计算机软件工具,这些工具可用于模型化物体和环境。
在描述三维场景的三维模型化软件中使用的许多基本约定是基于各种行业中使用的传统约定。
例如,建筑师为了用一个简明的方法表达他们设计的空间,使用各种涉及测量、构图和定序的约定。
即使简单的矩形房间设计也要测量多次,以便于房间的所有构件放在被设计放置的地方。
此外,为了准确地按照设计师的图纸来建造,泥瓦工需要进行测量。
多年来泥瓦工和建筑师已形成约定,如何测量空间、建造物体、在结构中安装,它们的约定是精确、简洁的。
我们用类似的约定来描述用一个计算机程序模拟的三维空间中物体的尺寸、位置和次序。
让我们从定义空间或场景的边界开始三维空间的定义,最简单的方法是想象我们是在一个大立方体内工作。
可以将这个立方体当作我们的空间或环境。
在这个立方体中的物体是可见的,在其外部的物体是不可见的。
在这个空间中的主参考点称为主空间原点。
这个原点通常位于这个空间的中心。
根据模型需要和方案,该点也可放在或重新放在其他点上。
所有三维空间都有3个基本的维:宽度、高度和深度。
表达三维空间中这些维的普遍方法是使用箭头或轴。
通常用字母X表示标记三维空间宽度的轴;用Y表示标记三维空间高度的轴;用Z表示标记三维空间深度的轴。
这三个轴交叉的空间点就是主坐标原点。
直角坐标系可以用来定义三维空间中特定的位置,精确定位三维空间中物体的点。
René Descartes是一位18世纪法国的哲学家和数学家,他正式使用标记为X、Y、Z的3个轴表示三维空间中维的思想。
他推导出的坐标系称为笛卡尔坐标系,在该系统中每个轴被分成许多测量单位。
原理上,这些单位是抽象的值,它可表示不同的测量单位和维刻度。
上课内容
区间非零
次数p=2
顶点数n+1=4+1 M=n+p+1=4+2+1节点数m+1=8次数p=3
顶点数n+1=6+1
M=n+p+1=6+3+1
节点数m+1=11
9/17
11/17
例题:
三、NURBS 曲线形状的修改
(1)NURBS 曲线形状是由那些因素决定的?实际应用中,若要对NURBS 曲线作局部修改,一般可采取什么办法?
(2)如题图所示,由顶点V 0、V 1、V 2、V 3、V 4、V 5构造NURBS 曲线,改变顶点V 3所对应的权因子ω3得到的三条不同形状的曲线,B ,N ,B i 分别是ωi =0,ωi =1,ωi ≠{0,1}的对应曲线上的点。
1) 请写出ω3与点B ,N ,B i 及V 3四点之间的关系。
2) 定性分析ωi 对曲线形状的影响。
12/17圆锥曲线、圆弧及圆的NURBS 表示
CSF=ω2/ωω,
优弧、半圆可以利用重节点将两段、三段劣弧拼接组成。
内部重节点的一种给法:采用二重节点(端点仍为三重)
18/17。
第十二章B样条曲面B样条曲面在CAD/CAM中具有非常重要的地位,它可由B样条曲线通过直积推广而得,正如由Bézier曲线经由直积推广而得Bézier曲面一样。
本章主要讨论B样条曲面的性质及其相关的配套技术。
12.1 B样条曲面的定义及性质给定三维空间个点,参数和的节点矢量、,参数曲面:(12.1.1)称为次B样条曲面。
式中称为曲面的控制顶点或de Boor点,逐次用线段连接点列中相邻两点组成的空间网格叫做曲面的控制网格或de Boor网格,分别是由节点矢量定义的规范B样条基函数,次数分别为和。
由式(12.1.1)可以看出,次B样条曲面是由片次参数多项式曲面组合而成的多项式样条曲面。
其性质可由B样条曲线的性质推广而得。
1. 局部性。
次B样条曲面上参数为的点至多与个控制顶点有关,与其他控制顶点无关。
移动控制顶点至多影响到定义在区域上的那一部分曲面形状,对曲面的其余部分不产生影响。
2. 参数连性。
B样条曲面的每一片在其内部连续,而在节点处则是连续,其中分别是节点的重数。
3. 凸包性。
B样条曲面的每一片都位于定义该片曲面的控制顶点,的凸包之中,整个B样条曲面位于定义各片曲面的控制顶点的凸包的并集之中。
这样以来,B样条曲面的凸包区域就比同一组顶点定义的Bézier曲面的凸包区域要小,至多相同。
由凸包性质可以导出以下结果:•若控制顶点重合时,由这个控制顶点定义的次B样条曲面片便退化为这个重合点;•若上述的个控制顶点共面,那么所定义的曲面片便是平面片。
4. 磨光性质等。
同一组控制顶点定义的B样条曲面,随着次数的升高越来越光滑。
5. 仿射不变性。
B样条曲面在仿射变换下不便。
6. 对Bézier曲面的包含性。
若,且参数节点矢量选择如下:则由此确定的B样条曲面就是次Bézier曲面。
7. 等参数线。
固定,那么曲线是一条次B样条曲线,其控制顶点为同理,固定,其参数曲线为一条次B样条曲线,相应的控制顶点为然而,与Bézier曲面一样,变差缩减性对B样条曲面将不再成立。
样条曲面拟合在计算机图形学和计算机辅助设计中起着至关重要的作用。
而点云补全算法则可以用来处理三维模型中的空洞,使得模型更加完整。
本文将介绍样条曲面拟合和点云补全算法,以及它们在实际应用中的重要意义。
一、样条曲面拟合1. 什么是样条曲面样条曲面是一种平滑的、连续的曲面模型。
它由一个或多个贝塞尔曲线或B样条曲线组成。
样条曲面通常用来近似表示物体的外形,因为它具有高度的灵活性和精度。
2. 样条曲面拟合的意义样条曲面拟合可以用来找到一组曲面,使得这些曲面与给定的点集的拟合误差最小。
在实际应用中,样条曲面拟合可以用来重建缺失的曲面数据、对原始数据进行平滑处理、提取数据中的特征等。
3. 样条曲面拟合的算法常见的样条曲面拟合算法包括最小二乘法拟合、最小二乘法加惩罚项拟合、移动最小二乘法拟合等。
这些算法在拟合过程中会考虑拟合误差和模型的复杂度,以找到最优的拟合曲面。
二、点云补全算法1. 什么是点云补全点云补全是指通过给定的部分点云数据,来推断出完整的三维模型。
在现实世界中,许多三维扫描设备得到的数据存在缺失或者噪声,因此需要进行点云补全来修复这些缺陷。
2. 点云补全的意义点云补全算法可以用来处理三维重建、虚拟现实、医学图像处理等领域。
它可以帮助用户从不完整的数据中还原出完整的物体模型,提高数据的有效性和可视化效果。
3. 点云补全算法的分类点云补全算法可以分为基于拓扑结构的算法、基于形态学的算法、基于学习的算法等。
这些算法在补全过程中考虑了点云数据的拓扑关系、形状信息和学习模型,以较好地还原出完整的三维模型。
三、样条曲面拟合与点云补全的结合1. 样条曲面拟合在点云补全中的应用通过对局部点云数据进行样条曲面拟合,可以得到平滑的曲面模型。
这些模型可以用来填补点云数据中的空缺,从而实现点云补全的目的。
2. 点云补全在样条曲面重建中的应用点云补全算法可以用来处理样条曲面模型中的缺失部分,从而得到完整的曲面模型。
这样可以提高样条曲面的精度和完整性,使得它更加逼真和可靠。
B样条曲线曲⾯(附代码)样条曲线1.1 B样条曲线⽅程B样条⽅法具有表⽰与设计⾃由型曲线曲⾯的强⼤功能,是形状数学描述的主流⽅法之⼀,另外B样条⽅法是⽬前⼯业产品⼏何定义国际标准——有理B样条⽅法 (NURBS)的基础。
B样条⽅法兼备了Bezier⽅法的⼀切优点,包括⼏何不变性,仿射不变性等等,同时克服了Bezier⽅法中由于整体表⽰带来不具有局部性质的缺点(移动⼀个控制顶点将会影响整个曲线)。
B样条曲线⽅程可表⽰为其中,d i(i=0,1...n)为控制顶点(坐标),N i,k(i=0,1...n)为k次规范B样条基函数,最⾼次数是k。
基函数是由⼀个称为节点⽮量的⾮递减参数u的序列U:u0≤u1≤...≤u n+k+1所决定的k次分段多项式。
B样条的基函数通常采⽤Cox-deBoor递推公式:(2)式中i为节点序号,k是基函数的次数,共有n+1个控制顶点。
注意区分节点和控制顶点,节点是在节点⽮量U中取得,控制顶点则是坐标点,决定B样条的控制多边形。
Cox-deBoor递推公式是B样条曲线的定义的核⼼,该公式在程序中的实现可采⽤递归的⽅式:1function Nik_u = BaseFunction(i, k , u, NodeVector)2 % 计算基函数Ni,k(u),NodeVector为节点向量34if k == 0 % 0次B样条5if (u >= NodeVector(i+1)) && (u < NodeVector(i+2))6 Nik_u = 1.0;7else8 Nik_u = 0.0;9 end10else11 Length1 = NodeVector(i+k+1) - NodeVector(i+1);12 Length2 = NodeVector(i+k+2) - NodeVector(i+2); % ⽀撑区间的长度13if Length1 == 0.0 % 规定0/0 = 014 Length1 = 1.0;15 end16if Length2 == 0.017 Length2 = 1.0;18 end19 Nik_u = (u - NodeVector(i+1)) / Length1 * BaseFunction(i, k-1, u, NodeVector) ...20 + (NodeVector(i+k+2) - u) / Length2 * BaseFunction(i+1, k-1, u, NodeVector);21 endCox-deBoor递推公式所给程序可⽤于计算基函数N i,k(u)的值,程序中对不同类型的B样条曲线区别在于节点⽮量 NodeVector 的取值不同。