
平析了细分特点,并详控流法和峰值电流法的制摘:要讨论了平均电。形波实验最后提供了流法控制芯片UC3854BN的应用,均电
;偿斜坡补因数校正;;峰值电流控制;功率关键词:平均电流控制
荡振次谐波
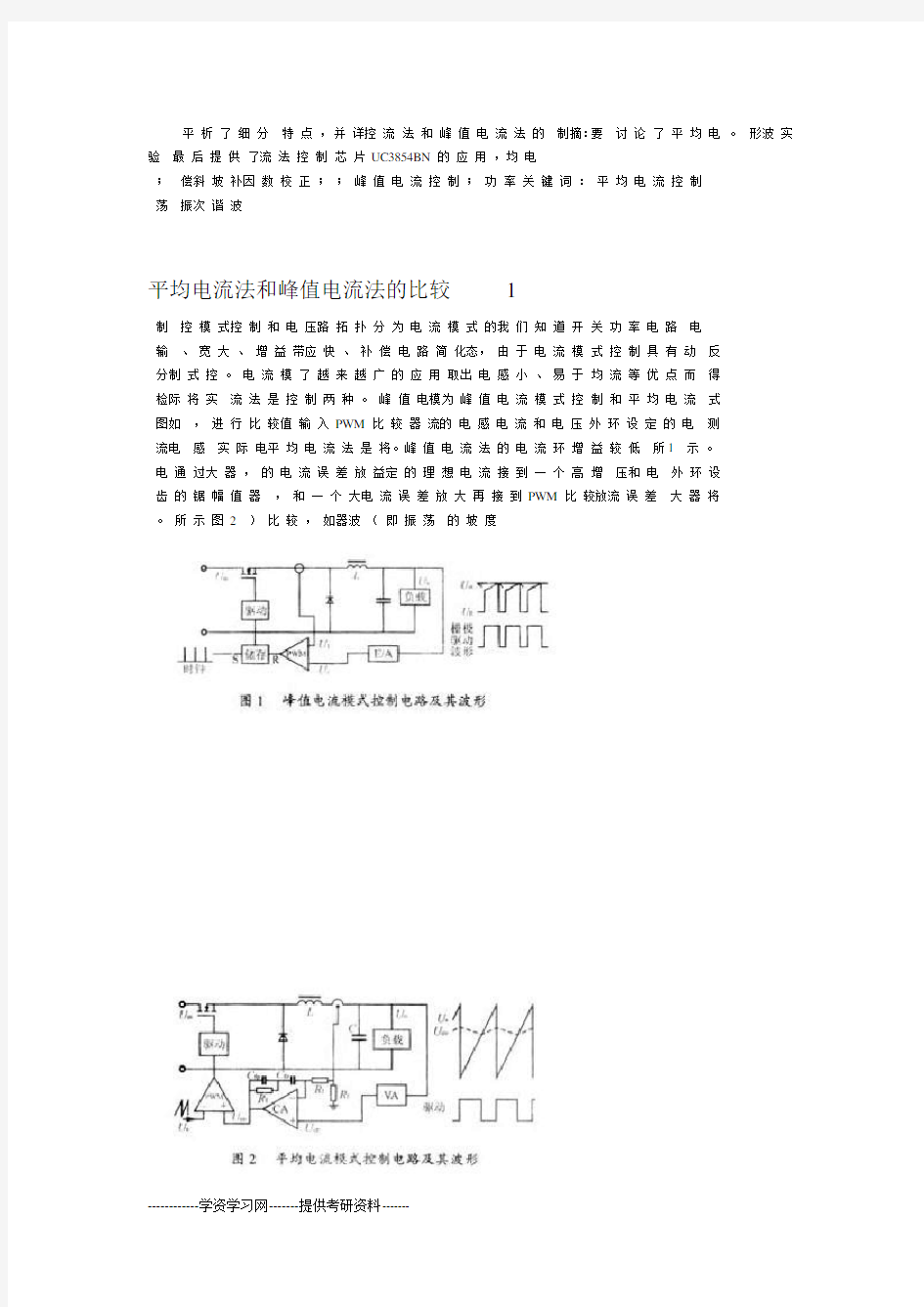
平均电流法和峰值电流法的比较1
制控模式控制和电压路拓扑分为电流模式的我们知道开关功率电路电
输、宽大、增益带应快、补偿电路简化态,由于电流模式控制具有动反
分制式控。电流模了越来越广的应用取出电感小、易于均流等优点而得
检际将实流法是控制两种。峰值电模为峰值电流模式控制和平均电流式
图如,进行比较值输入PWM比较器流的电感电流和电压外环设定的电测
流电感实际电平均电流法是将。峰值电流法的电流环增益较低所1示。
电通过大器,的电流误差放益定的理想电流接到一个高增压和电外环设
齿的锯幅值器,和一个大电流误差放大再接到PWM比较放流误差大器将
。所示图2)比较,如器波(即振荡的坡度
:点以下缺比主要有和平均电流模式控制相峰值电流模式控制
流电关开升沿(即制是将电感电流的上式声1)对噪敏感峰值电流模控
翻出器输PWM比较电流达到设定值,瞬电)同设定的流值相比较,当态
小)很度即(到设定值的坡升将功率开关管关断。电感电流上转/L U-U Oin关开。每次受噪声干扰控更小,所以这种制方法易度,特别是小时坡U in就压小电电路的一个尖峰。并且耦合到控制管通断时都会产生一个噪声
。波纹生很大的波运做模式而产能使开关管迅速关断,使电路处于次谐功使钟脉冲比较,当时是将电流放大器的输出和晶振而平均电流模式而
抗式电流模低值,所以平均率开关管开通后,晶振幅度迅速降到了一个。强能力干扰值峰时%50于小和%50于大)比空占(D是别分4图及3图偿补坡斜需)2.,值定电流设压放大器输出的的电感电流波形图。其中Ue是电电流控制
中图率。从沿及下降沿斜感流,、分别是电电流的上升是扰动电IoΔm m21动时扰D>50%I1变小,而扰动电流引起的电流误差Δ可以看出当D<50%时
工路时电式控制在%值差变大。所以峰电流模电流引起的电流误D>50ΔI1补,电路路。对于Buck稳加坡度补偿以定电较不作稳定,需给PWM比器是,但算并恒定便,所以补偿值于计,偿坡度是由于输出电压恒定U/L o(是度,补偿坡性;对于Boost 电路补偿电路还是增加了整个电路的复杂使这恒定,偿,所以补值不输由于入电压随电网波动而变
化),U U/L oin导并的性能电降低了路生,很多时候会发过补偿,络定设计的固补偿网
度坡补偿够供足的晶控制用振幅度来提式均变了致波形畸。而平电流模
。路偿电外加补无,而须
比空随着占控制模式中示如值误差图5所,峰值电流均3)具有尖峰值/平
偿补过斜坡。虽然可以通同、平感不、的同,电电流的均值也不D D I I2211路电增加了来获得不同占空比下一致的电感电流,如图6所示,但这也。性杂复的
即,的值Ue设定电流跟随误差电压电流模式控制的实质是使平均电感峰但。降为一阶整个系统由二阶电感用一个恒流源来代替,从而使可将感电于路中由在差值,在BUCK电法电感电流的平均值和峰值间存值电流用正作环的校且存在电压外对电感电流的平均值很小,并电流的纹波相跟值要中,峰;在BOOST电路平均
值的这种误差可以忽略,所以峰值和是其流,尤大,在低电所以和平均值间的误差很随输入电网的正弦波,输使,它会误差最大输入电流过零时,这种电流不连续时,如每半周期但,变小流的纹波个大电感来使电感电入电流波形畸变。这时就需要一
。力扰能降低抗干电流的坡度变窄,这将使电感
要重个制的一峰是电流模式控生次谐波振荡内部电流环的增益尖4)产
路致电,导相移超出范围峰发生在1/2开关频率处,使问题。这种增益尖时冲动脉续固定的驱次谐波振荡。导致在连工作不稳定,使电压环进入波谐次偿来抑制。这时也需斜坡补,输出占空比却在变化,如图7所示
。荡振
控制电路设计2UC3854BN
均、平路的拓扑用数校正电路,采了电因功计我们设的率P=1200WBoost o:下数如芯片。电路参电流法的控制电路及UC3854BN的控制~)%~%(电输入压:V275V=165220=U75 125in:率关开频kHz=80f s>0.95η:率效.
1001:比:变压器变检测:压出电输V410U=DC o0.993>:PF功率因数Hμ:600电感Ω15阻:检测电计设部分 2.1功率
计设电感1)
点算为计该时刻选以计算电感时取小输入电压最时电感电流最大,所感电,含量越多波关,允许的纹和感的大小还开关中允许的纹波有。电(ILIN峰值线电流的20%。最大的波,一般选纹含量为线电流峰值值越小。比空时的占D为电流峰值PK)
发生在最小的输入电压时,
择容选输出电2)
、电压直流波电流、输出次和开关频率纹波电流、谐出输电容的大小
波纹关频率电流等于开电输出保持时间有关。容波输出纹电压、功率及
式公计算出电容的输当考虑保持时间时,谐电流和波电流之和。C100Hz o为
内范围压在一定后输入关断,输出电电式中:容的保持时间,指t——H;s~50μ一般为15间保存的时,
。电压最小工作负荷U——omin波纹流波电、间,只考虑纹,一般按~选取若不考虑保存时12μF/W C o。选,在此压,则按选取电FμC=1C2000.2μF/W oo择选极管的二率MOS管和3)功二压。升择,,,,主管选pFI=20A C IRFP460=870U=500VR=0.27ΩMOS OSSDS(ON)DSSD要(25ns复时间反APT30S60B,30A/600V,向恢二快选极管择高频速恢复极管。)75ns求小于
。极管的栅电阻到开关一放信动号被TC4424大后接个10Ω的驱UC3854BN的
路电法器乘法器/除4)根是作用示。该电路的器乘是核UC3854的心一法/除法器电路,如图8所波流电形准流弦个生,电半正后整据流的弦波压产一正电标波际实,I MO.
功高取得,所以能的入电压正弦波形跟形就踪该波形,即相当于跟踪输:下程如其设计过率因数。
)5.5V围0~工作范Uff设定范围1.5~4.7V,——选择Uff分压电阻(
有则Uff=1.5V,165×0.9)时(165V其平均值为设低进线电压0.9/1.5=99:1165×
则,kΩ阻Rff3为10设分压电
,--设,则,10010=880kΩR=900R=10×99=990kΩ=100kΩR ff1TOTALff2为定波极点滤二阶滤波器,、分别并联滤波电容、构成R C C R ff1ff3ff2ff2:定的过程确是根据如下的15Hz(fp=15Hz),滤波极点
输器响乘法小将直接影)倍频(正弦半波,而的大由于是二100Hz U U ffin求要。因此次谐波分量并,使该正弦半波包含4出的100Hz正弦半波的大小
度速响应压幅值的虑到乘法器对输入电时尽量为平滑的直流量,同考U ff得获为了低,并且的转折频率不能太要快,为此要求该二阶低通滤波器
谐起的失真引一频率。当由于点大带宽,要求两阶滤波器的极在同最U ff经市电于输入以下时,又由限波谐失真的百分比被制在 1.5%真波失占总
增的滤波器该二阶低通%次谐波失真为66.7,因此桥式整流后产生的二=0.025/66.7%1.5%:益为
系关率的转折频级为0.15。根据增益与增滤两平分给级低通波器的益每fc=15频率以转折率频fin=2×50=100Hz,所信已:增益A V=fc/fin,知输入号的
小大电容的算此计滤波,Hz由
RM0阻算电计——
时载大负进线电压最低出乘且线最低进电压时法器输为,最A I=100μ1V AC公
6V值大最为)出输的器大放差误压电(,UEA,因此根据乘法器输出式
并所以大于,出,极点频率应因为上的电压是乘法器的输RC R100Hz R M0M0为电容声抑制联噪C123350nF)≈10×100×4.5×C≤1/(2πfR)=1/(2πMO12p。择为实验选1nFC12计设环4)电流率关频后在开电流环补偿相必须进行电流环位补偿。,为了稳定运行
工控制电流益完成平均应低频的零点响提供高增。附近提供平稳增益在开当降沿,电流的下要大器的增益配合电感误。作在开关频率附近差放。度的坡应配合晶振关关管断时,则
率关频应率为(开,单位增益交越频计本设开关频率14kHz fc1/6f=80kHz s因,值是合适的带电流,10kHz的宽跟流),但本电环的主要工作是踪线低或率上,频须设置在交越在交越频率定。电流环的零点必此将f=10kHz c率频于交越度有45°,低设置在交越频率上,相位裕于交越频率处。如所。扰小冲低、干度的系统工作稳定、过相位裕度更大点。45°相位裕一率的开关频)。当极点高于处置以将零点频率在交越频率(kHz f f=10z z极,感性对噪声的敏为率制环的频响应。了减少响会点,半时极不影控(处频率在极点频率开关计近关设点通常置在开频率附。本设设置f p:下过算程如简)。略计=80f kHz P为益的率部分增功点零处G id(s)
=0.26
功和益电流环增增益,即GCA=1。而整因为交越频率处个电流环为单位有则1,之积为率部分增益
计环设)电压5部率路,功容的一阶电的低频模式是电流源驱动电Boost电路输出部分-有式具容,该模源,输出电容组成该电分和电流反馈环组成该电流定稳起偿,比,电压环也必须补20db/10倍频的增益特性。为了工作稳定
压电小。线电流畸变路电压环更需要的是保持输入性,功率因数校正电误压波;电上的工频二次谐环的带宽必须设计为足够低以衰减输出电容
因使功率差放大器也必须有足够的相位裕度以在相位上跟踪输入电流,。高提数.
计再始,谐波电压开出电容上允许的二次电压环部分的设计从计算输波谐次器的二由此算出电压放大算电压放大器允许的输出二次谐波,及
压电益和率部分的增以算出电压环的补偿电容。功增益,由该增益值可率频出交越环的增益为1算环的增益组成整个电压环的增益,整个电压
:下程如的电阻。计算过。再由交越频率算出补偿网络输出电容的纹波电压为U OPK
实验结果3
计设该可以看出13图、图14所示。波到设根据以上计所得的实验形如。目标设计,数0.993效率0.95的很好地完成了功率因
结论4
对、定性点,在电路稳本文分析了平均电流控制和峰值电流控制的特控流电值峰于优要制控流电均平,面方等便简计设路电和性感敏的声噪
电正因数校率在应片制芯UC3854用功控式模流电均平种一将又后然。制
。果效用应的好良了得取,中路
TI slua079 Average current mode control of switching power supplies by Lloyd Dixon 版本日期译者Email 备注 1.0 2014/07/12 Eric Wen 文天祥eric.wen.tx@https://www.doczj.com/doc/f67157234.html, 初始版本 开关电源中的平均电流模式控制 关键词:电流模式控制, 平均电流模式控制, 峰值电流模式控制 摘要:在开关电源中,电流模式控制(CMC)是通过检测及控制电感电流峰值来实现.但是这样会导致一些严重的问题,如容易受噪声干扰,需要斜坡补偿,并且峰值-平均电流之间的误差不能修正(因为其固有的低电流带宽增益).平均电流模式控制则可以消除以上问题,它通过控制电流(而非电感上的电流)来实现,这样的话极大拓宽了其应用范围. 绪论 如图1所示,(峰值)电流模式控制是一个双环控制系统.电源的电感是被’隐藏’在电流内环之中.这样可以简化了电压外环的设计并同时带来了一些性能的提高.如:良好的动态响应等.电流内环的主要是目标是控制电感的状态空间平均电流,但是在实际中,却是控制电感的瞬时峰值电流.(在开关管通时,开关电流等于电感电流).如果电感电流纹波较小,此时峰值电流模式控制与平均电感电流控制模式等效. 图1 峰值电流模式控制电路及其波形 在传统的开关电源中,如果是采用BUCK及其衍生拓扑的话,电感位于输出侧.电流模式控制实际即为输出电流控制.这样就带了一些性能上的好处.同时另一方面,在用于PFC的预调节的
BOOST电路中,电感位于输入端,电流模式控制即控制输入电流,这样可以方便地实现输入电流正弦波控制(即PFC功能). 峰值电流模式控制产生的问题 对噪声敏感.此方法是通过电压外环设定的基准电流值,.当电感电流瞬间值达到预设值时,关断开关管.与预定的电流水平相比,电流斜坡是相对来说很小的.特别是当输入电压Vin是低压的时候.这样的结果是:这种控制方法极易受噪声影响.而在开关管每个导通期间都会产生一个噪声尖峰.部分噪声电压耦合进入控制回路并立即关掉开关管,这样就会导致出现次谐振工作模式(纹波很大).所以对于此种控制方法,PCB Layout及旁边设计至关重要. 需要斜坡补偿.当占空比大于0.5时,峰值电流模式天然存在不稳定性,这样会导致次谐波振荡.需要在比较器输入端加入一斜坡补偿(此斜坡/率等于电感电流下降斜率)来消除此种不稳定性.对于BUCK而言,电流下降的斜率为V o/L(V o为常数),所以斜坡补偿度是固定的而且可以计算出来,只是增加了设计的复杂度而已.但是对于高功率因数的BOOST电路,电感下降斜率为(Vin-V o)/L 因此需要补偿的量是随着输入电压变化的,并且变量化是相对比较大的(因为输入电压跟随整流正弦电压).如果采用一个固定的斜率补偿(这个补偿足够多),很多情况下有可能导致过补偿,带来的后果就是性能降低并增加(电流)畸变. 峰值与平均电流之间的误差.在传统的BUCK变换器中,这个误差一般不会导致什么十分严重的问题.这是因为电感电流纹波相对于满载时电感平均电流而言比较小,同时电压外环控制也可以消除这种误差. 在高功率功率BOOST电路中,这个误差则是十分可怕的.因为它对导致输入电流的畸变.当峰值电流跟随理想的正弦电流时,平均电流则不同.峰值-平均的误差在低电流时更糟糕,特别是在每个输入电流过零时(此时电流变成不连续状态).为了实现较低的电流畸变,峰值-平均之间的电流误差必须越小越好,这样需要一个很大的电感来平滑电流.这个大电感又会让电感电流斜率变得缓慢进一步恶化原来脆弱的抗噪声干扰能力. 拓扑问题.传统的峰值电流模式控制实际上是控制电感电流,当它用于类BUCK拓扑时(输出电流即为电感电流)最为有效.对于反激或是BOOST拓扑而言,电感并不是位于输出端而位于输入端,如果采用峰值电流模式控制,实际是一个”错误的”电流控制,这样峰值电流模式控制的优势就消失殆尽. 同样的,BOOST电路由于电感位于输入端,这样就可以用来控制输入电流以实现高功率因数.但是BUCK/反激则不能够这样控制,因为电感不在输入侧(这样也会导致’错误的’电流控制). 平均电流模式控制 峰值电流模式控制是直接比较实际电感电流与设计的电流值(通过电压外环设定),由于这个电流内环增益很低所以并不会十分准确. 参考图2,平均电流模式控制可以克服这些缺点,它是通过在电流环里引入一个高增益的集成电流运放来实现.采样电阻Rs上的电压反映出真实的电感电流, 这个差异(或是说电流误差) 通过放大并与一个幅值很大的锯齿波相比较. 电流环的增益宽带可以通过优化电流误差放大器周边的补偿网络来实现最佳性能.与峰值电流模式相比,电流环的增益穿越频率fc可以近似相同,但是在低频下平均模式的增益远远大于峰值电流模式. 结果是: 1.平均电流是与设定电流精确跟随.这对于功率因数校正电流特别重要, 可以使用一个相 对小的电感并可以减少3%的谐波失真.实际上, 当变换器进入断续工作模式(此时电流/功率小),此时平均电流模式仍然工作良好.外环电压控制回路是对这种模式的改变是不知
电压、电流的反馈控制模式 现在的高频开关稳压电源主要有五种PWM反馈控制模式。电源的输入电压、电流等信号在作为取样控制信号时,大多需经过处理。针对不同的控制模式其处理方式也不同。下面以由VDMOS开关器件构成的稳压正激型降压斩波器为例,讲述五种PWM反馈控制模式的发展过程、基本工作原理、电路原理示意图、波形、特点及应用要`氪,以利于选择应用及仿真建模研究。 (1)电压反馈控制模式 电压反馈控制模式是20世纪60年代后期高频开关稳压电源刚刚开始发展而采用的一种控制方法。该方法与一些必要的过电流保护电路相结合,至今仍然在工业界被广泛应用。如图1(a)所示为Buck降压斩波器的电压模式控制原理图。电压反馈控制模式只有一个电压反馈闭环,且采用的是脉冲宽度调制法,即将经电压误差放大器放大的慢变化的直流采样信号与恒定频率的三角波上斜坡信号相比较,经脉冲宽度调制得到一定宽度的脉冲控制信号,电路的各点波形如图1(a)所示。逐个脉冲的限流保护电路必须另外附加。电压反馈控制模式的优点如下。 ①PWM三角波幅值较大,脉冲宽度调节时具有较好的抗噪声裕量。 ②占空比调节不受限制。 ③对于多路输出电源而言,它们之间的交互调节特性较好。 ④单一反馈电压闭环的设计、调试比较容易。 ⑤对输出负载的变化有较好的响应调节。 电压反馈控制模式的缺点如下。 ①对输入电压的变化动态响应较慢。当输入电压突然变小或负载阻抗突然变小时,因为主电路中的输出电容C及电感L有较大的相移延时作用,输出电压的变小也延时滞后,而输出电压变小的信息还要经过电压误差放大器的补偿电路延时滞后,才能传至PWM比较器将脉宽展宽。这两个延时滞后作用是动态响应慢的主要原因。 ②补偿网络设计本来就较为复杂,闭环增益随输入电压而变化的现象使其更为复杂。 ③输出端的LC滤波器给控制环增加了双极点,在补偿设计误差放大器时,需要将主极点低频衰减,或者增加一个零点进行补偿。 ④在控制磁芯饱和故障状态方面较为麻烦和复杂。 改善及加快电压模式控制动态响应速度的方法有两种:一种是增加电压误差放大器的带宽,以保证其具有一定的高频增益。但是这样容易受高频开关噪声干扰的影响,需要在主电路及反馈控制电路上采取措施进行抑制或同相位衰减平滑处理。另一种是采用电压前馈控制模式。电压前馈控制模式的原理图如图1(b)所示。用输入电压对电阻、电容(Rt、Ctt)充电,以产生具有可变化的上斜坡的三角波,并且用它取代传统电压反馈控制模式中振荡器产生的固定三角波。此时输入电压变化能立刻在脉冲宽度的变化上反映出来,因此该方法明显提高了由输入电压的变化引起的动态响应速度。在该方法中对输入电压的前馈控
对一个简单的峰值电流限制进行改进方法 故障保护是所有电源控制器都有的一个重要功能。几乎所有应用都要求使用过载保护。对于峰值电流模式控制器而言,可以通过限制最大峰值电流来轻松实现这个功能。在非连续反向结构中,为峰值电流设置限制可最终限制电源从输入源获得的功率。但是,限制输入功率不会限制电源的输出电流。如果出现过载故障时输入功率保持不变,则随着输出电压下降,输出电流增加(P=V*I)。发生短路故障时,这会让输出整流器或者系统配电出现难以接受的高损耗。本文利用一些小小的创新和数个额外组件,为您介绍如何对一个简单的峰值电流限制进行改进,将电源变为一个恒定电流源,而非一个恒定功率源。 图1对比了理想输出电压与恒定功率和恒定电流限制的电流。这两种情况下,过载故障保护都在120%最大额定负载时起作用。在一个使用功率限制的系统中,输出电流随负载增加电压反向而增加。在现实系统中,有功率限制的反向控制器会在某个点关闭,原因是控制器的偏压损耗。相比之下,一旦超出过载阈值,有电流限制的系统便会立刻关闭。可以通过直接检测隔离边界二次侧的负载电流,实现电流限制。但是,这样做需要使用更多的电路,效率降低,而且成本一般会高得离谱。 图2 显示了移动设备充电器所使用的一个5V/5W 非连续反向电源的原理图。在范例中,我们使用了UCC28C44 控制器,它是大多数经济型峰值电流模式控制器的代表,拥有功率限制功能。在非连续反向结构中,如果忽略效率影响,可使用方程式1 计算负载功率(P)的大小。 由于变压器电感(L)和开关频率(f)均固定不变,因此可以通过控制峰值一次电流(IPK)对输出电压(VOUT)进行调节。随着输出电流(IOUT)增加,电压开始下降,但是反馈环路要求更高的峰值电流来维持电压调节。 在反向转换器内部,引脚1(COMP)的反馈电压与峰值电流比较。通过R15 检测该峰值
电流型控制原理及特点分析 一、电流型控制原理及特点 原理: 电流型脉宽调制(PWM)控制器是在普通电压反馈PWM 控制环内部增加了电流反馈的控制环节,因而除了包含电压型PWM 控制器的功能外,还能检测开关电流或电感电流,实现电压电流的双环控制。控制原理框图如下图(图1)所示。 图1 双环电流型控制器原理图 从图1 可以看出,电流型控制器有两个控制闭合环路:一个是输出电压反馈误差放大器A,用于与基准电压比较后产生误差电压;另一个是变压器初级(电感)中电流在Rs 上产生的电压与误差电压进行比较,产生调制脉冲的脉宽,使得误差信号对峰值电感电流起着实际控制作用。系统工作过程如下:假定输入电压下降,整流后的直流电压下降,经电感延迟使输出电压下降,经误差放大器延迟Vca 上升,占空比变化,从而维持输出电压不变,在电流环中电感的峰值电流也随输入电压下降,电感电流的斜率di/dt 下降,导致斜坡电压推迟到达Vca,使PWM 占空比加大,起到调整输出电压的作用。由于既对电压又对电流起控制作用,所以控制效果较好在实际中得到广泛应用。 特点: a)由于输入电压Vi 的变化立即反映为电感电流的变化,不经过误差放大器就能在比较器中改变输出脉冲宽度(电流控制环),因而使得系统的电压调整率非常好,可达到 0.01%V, 能够与线性移压器相比。 b)由于双环控制系统内在的快速响应和高稳定性,反馈回路的增益较高,不会造成稳定性与增益的矛盾,使输出电压有很高的精度。 c)由于Rs 上感应出峰值电感电流,只要Rs 上电平达到1V,PWM 控制器就立即关闭,形成逐个脉冲限流电路,使得在任何输入电压和负载瞬态变化时,功率开关管的峰值电流被控制在一定范围内,在过载和短路时对主开关管起到有效保护。 d)误差放大器用于控制,由于负载变化造成的输出电压变化,使得当负载减小时电压升高的幅度大大减小,明显改善了负载调整率。 e)由于系统的内环是一个良好的受控电流放大器,所以把电流取样信号转变成的电压信号和一个公共电压误差放大器的输出信号相比较,就可以实现并联均流,因而系统并联较易实现。 二、峰值电流控制与平均电流控制的比较 峰值电流模式控制和平均电流模式控制相比主要具有以下缺点:
开关电源峰值电流模式控制PWM的优缺点 近年来电流模式控制面临着改善性能后的电压模式控制的挑战,因为这种改善性能的电压模式控制加有输入电压前馈功能,并有完善的多重电流保护等功能,在控制功能上已具备大部分电流模式控制的优点,而在实现上难度不大,技术较为成熟。 由输出电压VOUT 与基准信号VREF的差值经过运放(E/A)放大得到的误差电压信号 VE 送至PWM比较器后,并不是象电压模式那样与振荡电路产生的固定三角波状电压斜波比较,而是与一个变化的其峰值代表输出电感电流峰值的三角状波形或梯形尖角状合成波形信号 VΣ比较,然后得到PWM脉冲关断时刻。因此(峰值)电流模式控制不是用电压误差信号直接控制PWM脉冲宽度,而是直接控制峰值输出侧的电感电流大小,然后间接地控制PWM脉冲宽度。 电流模式控制是一种固定时钟开启、峰值电流关断的控制方法。因为峰值电感电流容易传感,而且在逻辑上与平均电感电流大小变化相一致。但是,峰值电感电流的大小不能与平均电感电流大小一一对应,因为在占空比不同的情况下,相同的峰值电感电流的大小可以对应不同的平均电感电流大小。而平均电感电流大小才是唯一决定输出电压大小的因素。电感电流下斜波斜率的至少一半以上斜率加在实际检测电流的上斜波上,可以去除不同占空比对平均电感电流大小的扰动作用,使得所控制的峰值电感电流最后收敛于平均电感电流。因而合成波形信号VΣ要有斜坡补偿信号与实际电感电流信号两部分合成构成。当外加补偿斜坡信号的斜率增加到一定程度,峰值电流模式控制就会转化为电压模式控制。因为若将斜坡补偿信号完全用振荡电路的三角波代替,就成为电压模式控制,只不过此时的电流信号可以认为是一种电流前馈信号。当输出电流减小,峰值电流模式控制就从原理上趋向于变为电压模式控制。 当处于空载状态,输出电流为零并且斜坡补偿信号幅值比较大的话,峰值电流模式控制就实际上变为电压模式控制了。峰值电流模式控制PWM是双闭环控制系统,电压外环控制电流内环。电流内环是瞬时快速的,是按照逐个脉冲工作的。 功率级是由电流内环控制的电流源,而电压外环控制此功率级电流源。在该双环控制中,电流内环只负责输出电感的动态变化,因而电压外环仅需控制输出电容,不必控制LC 储能电路。峰值电流模式控制PWM具有比起电压模式控制大得多的带宽。以下是开关电源峰值电流模式控制PWM的优缺点: 峰值电流模式控制PWM的优点是: ①暂态闭环响应较快,对输入电压的变化和输出负载的变化的瞬态响应均快; ②控制环易于设计; ③输入电压的调整可与电压模式控制的输入电压前馈技术相妣美; ④简单自动的磁通平衡功能; ⑤瞬时峰值电流限流功能,内在固有的逐个脉冲限流功能; ⑥自动均流并联功能。 峰值电流模式控制PWM的缺点是: ①占空比大于50%的开环不稳定性,存在难以校正的峰值电流与平均电流的误差。 ②闭环响应不如平均电流模式控制理想。 ③容易发生次谐波振荡,即使占空比小于50%,也有发生高频次谐波振荡的可能性。因而需要斜坡补偿。 ④对噪声敏感,抗噪声性差。因为电感处于连续储能电流状态,与控制电压编程决定的电流电平相比较,开关器件的电流信号的上斜波通常较小,电流信号上的较小的噪声就很容易使得开关器件改变关断时刻,使系统进入次谐波振荡。 ⑤电路拓扑受限制。
逆变器的两种电流型控制方式 摘要:研究分析了逆变器的两种双环瞬时反馈控制方式——电流型准PWM控制方式和三态DPM电流滞环跟踪控制方式,介绍其工作原理,分析比较其动态和静态性能,并给出具体实现电路及系统仿真结果。 关键词:PWM逆变器功率变换器控制 On Two Types of Current Programmed Control Topologies for Inverters Abstract:This paper presents a comparative study on two types of current programmed instant control modes for inverters, PWM and hysteresis type.Principle, static and dynamic performance are discussed. Realization circuits and simulation results are presented. Keywords:PWM, Inverter, Power converter, Control 中图法分类号:TN86文献标识码:A文章编号:0219 2713(2000)12-642-03 电流型双环控制技术在DC/DC变换器中广泛应用,较单电压环控制可以获得更优良的动态和静态性能[3]。其基本思路是以外环电压调节器的输出作为内环电流给定,检测电感(或开关)电流与之比较,再由比较器的输出控制功率开关,使电感和功率开关的峰值电流直接跟随电压调节器的输出而变化。如此构成的电流、电压双闭环变换器系统瞬态性能好、稳态精度高,特别是具有内在的对功率开关电流的限流能力。逆变器(DC/AC变换器)由于交流输出,其控制较DC/DC变换器复杂得多,早期采用开关点预置的开环控制方式[1],近年来瞬时反馈控制方式被广泛研究,多种各具特色的实现方案被提出,其中三态DPM(离散脉冲调制)电流滞环跟踪控制方式性能优良,易于实现。本文将电流型PWM控制方式成功用于逆变器控制,介绍其工作原理,与电流滞环跟踪控制方式比较动态和静态性能,并给出仿真结果。 1三态DPM电流滞环跟踪控制方式 电流滞环跟踪控制方式有多种实现形式[1,2,4,5],其中三态DPM电流滞环跟踪控制性能较好且易于实现[1]。参照图1,它的基本工作原理是:检测滤波电感电流iL,产生电流反馈信号if。if与给定电流ig相比较,根据两个电流瞬时值之差来决定单相逆变桥的4个开关在下一个开关周期中的导通情况:ig-if>h时(h见图1,为电流滞环宽度,可按参考文献[1]P64式5 2选取)S1、S4导通,UAB=+E,+1状态;ig-if-h时S2、S3导通,UAB="-"E,-1状态;|ig-if|h时S1、S3或S2、S4导通,UAB="0,"0状态。两个D触发器使S1~S4的开关状态变化只能发生在周期性脉冲信号CLK(频率2f)的上升沿,也就是说开关点在时间轴上是离散的,且最高开关频率为f。 仿真和实验表明,iL正半周,逆变器基本上在+1和0状态间切换,而iL负半周,逆变器基本上在-1和0状态间切换,只有U0过零点附近才有少量的+1和-1之间的状态跳变,从而使输出脉动减小。 2电流型准PWM控制方式
High Precision CC/CV Primary-Side PWM Power Switch GENERAL DESCRIPTION is a high performance offline PWM Power switch for low power AC/DC charger and adapter applications. It operates in primary-side sensing and regulation. Consequently, opto-coupler and TL431 could be eliminated. Proprietary Constant Voltage (CV) and Constant Current (CC) control is integrated as shown in the figure below. In CC control, the current and output power setting can be adjusted externally by the sense resistor Rs at CS pin. In CV control, multi-mode operations are utilized to achieve high performance and high efficiency. In addition, good load regulation is achieved by the built-in cable drop compensation. Device operates in PFM in CC mode as well at large load condition and it operates in PWM with frequency reduction at light/medium load. offers power on soft start control and protection coverage with auto-recovery features including Cycle-by-Cycle current limiting, VDD OVP, VDD clamp and UVLO. Excellent EMI performance is achieved with Power-Source proprietary frequency shuffling technique. High precision constant voltage (CV) and constant current (CC) can be achieved by FEATURES ?±5% Constant Voltage Regulation at Universal AC input ?High Precision Constant Current Regulation at Universal AC input ?Primary-side Sensing and Regulation Without TL431 and Opto-coupler ?Programmable CV and CC Regulation ?Adjustable Constant Current and Output Power Setting ?Built-in Secondary Constant Current Control with Primary Side Feedback ?Built-in Adaptive Current Peak Regulation ?Built-in Primary winding inductance compensation ?Programmable Cable drop Compensation ?Power on Soft-start ?Built-in Leading Edge Blanking (LEB)?Cycle-by-Cycle Current Limiting ?VDD Under Voltage Lockout with Hysteresis (UVLO)?VDD OVP ?VDD Clamp APPLICATIONS ?Low Power AC/DC offline SMPS for ?Cell Phone Charger ?Digital Cameras Charger ?Small Power Adapter ?Auxiliary Power for PC, TV etc.?Linear Regulator/RCC Replacement is offered in SOT23-6 package. Product Specification TYPICAL APPLICATION MXT7208MXT7208MXT7208 MXT7208 MXT7208
华 伟 1965年生,1990 年获北京工业大学功率半 导体器件专业工学硕士学位,副教授,从事新型电力电子器件应用及开关功率变换器的教学和科研工作。 设计与研究 30k W 电流模式PWM 控制的 DC DC 功率变换器 北方交通大学(北京100044) 华 伟 摘 要:新型30k W 电流模式P WM 控制的功率变换器采用N PT -IGBT 器件,无需串联隔直防偏磁电容,使用有源斜坡补偿技术,效率达到90%,具有极好的动态响应、过流保护及模块均流并联性能,是一种具有极大功率扩容(可达到100k W )潜力并易于工程化实现的IGBT 功率变换器。 关键词:电流模式 IGBT 全桥拓扑 开关模式整流器 变换器 收修改稿日期:1999203215 30k W curren t m ode P WM con trolled DC DC power converter N o rthern J iao tong U n iversity (B eijing 100044) Hua W e i Abstract :P resen ted in the paper is a novel 30k W cu rren t mode P WM con tro lled pow er converter .T he converter ,of w h ich the efficiency reaches 90%,app lies N PT -IGBT device and an active slope compen sati on techno logy w ith no need to series connect a DC b lock ing and b ias 2p roof capacito r .It featu res excellen t dynam ic respon se ,over 2cu rren t p ro tecti on ,parallel modu le cu rren t equalizati on ,very h igh pow er expan si on po ten tial (as h igh as 100k W )as w ell as easy engineering realizati on . Key words :cu rren t mode ,IGBT ,fu ll 2b ridge topo logy ,S M R ,converter . 近年来,随着新型电力电子器件的飞速发展, 10k W 以上的直流功率变换器已从SCR 的低频相控整流器方式发展为IGB T 的高频DC DC 开关功率变换器方式。国外的DW A 、GEC -AL STON 、AD tranz 、ABB [1] 等公司也于近年研制出各自的IGB T DC DC 充电机,主要用于高速电气化列车及地铁列车。IGB T DC DC 充电机的重量、 体积大幅度减小,性能明显改善,但要实现15k W ~200k W 的DC DC 高频开关功率变换,存在许多技术问题需要解决。下面根据30k W IGB T DC DC 充电机的研制情况,对有关技术问题进行分析研究。 1 主电路及控制方案 (1)主电路原理图 不同的DC DC 功率变换器拓扑及PWM 控制方法可以构成许多不同的主电路及控制方案[2]。根据技 术的成熟程度、工程化实现难度、装置的性能要求、系列化功率扩容考虑、长期可靠性要求等,在设计30k W IGB T DC DC 充电机时,选择了电流模式PWM 控制 的全桥拓扑(无隔直电容)功率变换器方案。功率变换器的工作频率约为20kH z 。主电路原理如图1所示。 其中C 2为母线单电容型snubber 电路,CT 为检测一次侧电流用的电流互感器。此一次侧电流信号用作电流模式PWM 反馈控制 。 图1 IGBT DC DC 充电机用功率变换器主电路原理图 (2)控制系统原理方框图 控制系统原理如图2所示。这是一个由110V 输出电压控制的电压外环及电流互感器CT 所检测的一次侧电流内环构成的双闭环反馈系统。斜坡补偿电路是电流模式PWM 控制的大占空比双端开关电源电路是为防止次谐波振荡所必需的。反馈补偿网络用以控制电压反馈闭环的稳定性。A 、B 两路驱动信号分别提供给图1中的两路对角线IGB T V 1、V 3和V 2、V 4。 1999年第5期机 车 电 传 动№5,1999 1999年9月10日EL ECTR I C DR I V E FOR LOCOM O T I V E Sep .10,1999
Buck 电路双闭环控制 一 引言 BUCK 电路是一种降压斩波器,降压变换器输出电压平均值Uo 总是小于输出电压U D 。通常电感中的电流是否连续,取决于开关频率、滤波电感L 以及电容C 的数值。 简单的BUCK 电路输出的电压不稳定,会受到负载和外部的干扰,加入补偿网络,可实现闭环控制,通过采样环节得到所需电压/电流信号,再与基准值进行比较,通过闭环控制器得到反馈信号,与三角波进行比较,得到调制后的开关波形,将其作为开关信号,从而实现BUCK 电路闭环控制系统。Buck 电路的闭环控制有电压环控制、电流环控制以及二者结合的双闭环控制,此处采用双闭环控制:电流内环,电压外环。根据相关的电路设计适当的补偿网络对电路进行校正,提高电路系统输出性能。 二 BUCK 变换器主电路参数设计 2.1 设计及内容及要求 1) 输入直流电压(in V ):50V 2) 额定输出电压(o V ):15V 3) 额定输出电流(o I ):1.67A 4) 输出电压纹波峰-峰值:mV V o 016.02≤? 5) 电感电流纹波峰峰值:A I L 42.02≤? 5) 锯齿波幅值(p V ):2.5V 6) 开关频率(s f ):100kHz 7) 输出电压采样网络传函3/1)(=s H
2.2主电路设计 根据以上的对课题的分析设计主电路如下: 图2-1 Buck 电路原理图 1)占空比计算 3.015 50=== o in V V D ,进而有S f D DT t s s on μ3/=== 2)滤波电感设计 由L L u dt di L =可知,)1(1 2D T V L I s o L -= ?,代入数值得mH L 25.0=,考虑到 电感寄生电阻,取Ωm 1。 3)滤波电容设计 由c c i dt du C =可知,L s o I T C V ????=?22112,代入数值得uF C 83.20=,考虑到 电容的等效串联电阻,Ω=01.0ESR R 。 三 Buck 变换器控制器参数设计 3.1 电路双闭环控制结构 整个系统的双闭环控制结构图如图3-1。 图3-1 系统总控制框图 图中Gv 、Gi 网络传函需根据各环传函的特性设计相应的零极点以及增益值,使系统传函达到我们的目标函数。 下面对电路进行分析,从电流内环的设计到电压外环的设计。
峰值电流模式控制总结 PWM (Peak Current-mode Control PWM) 峰值电流模式控制简称电流模式控制。它的概念在60年代后期来源于具有原边电流保护功能的单端自激式反激开关电源。在70年代后期才从学术上作深入地建模研究。直至80年代初期,第一批电流模式控制PWM集成电路(UC3842、UC3846)的出现使得电流模式控制迅速推广应用,主要用于单端及推挽电路。近年来,由于大占空比时所必需的同步不失真斜坡补偿技术实现上的难度及抗噪声性能差,电流模式控制面临着改善性能后的电压模式控制的挑战。如图1所示,误差电压信号 Ue 送至PWM比较器后,并不是象电压模式那样与振荡电路产生的固定三角波状电压斜坡比较,而是与一个变化的其 比较,然后得到峰值代表输出电感电流峰值的三角状波形或梯形尖角状合成波形信号U Σ PWM脉冲关断时刻。因此(峰值)电流模式控制不是用电压误差信号直接控制PWM脉冲宽度,而是直接控制峰值输出侧的电感电流大小,然后间接地控制PWM脉冲宽度。 图1采用斜坡补偿的BUCK电流型控制 1. 峰值电流模式控制PWM的优点: ①暂态闭环响应较快,对输入电压的变化和输出负载的变化的瞬态响应均快;峰值电流模式控制PWM是双闭环控制系统,电压外环控制电流环。电流环是瞬时快速按照逐个脉冲工作的。功率级是由电流环控制的电流源,而电压外环控制此功率级电流源。在该双环控制中,电流环只负责输出电感的动态变化,因而电压外环仅需控制输出电容,不必控制LC储能电路。由于这些,峰值电流模式控制PWM具有比起电压模式控制大得多的带宽。 ②虽然电源的L-C滤波电路为二阶电路,但增加了电流环控制后,只有当误差电压发生变化时,才会导致电感电流发生变化。即误差电压决定电感电流上升的程度,进而决定功率开关的占空比。因此,可看作是一个电流源,电感电流与负载电流之间有了一定的约束关系,使电感电流不再是独立变量,整个反馈电路变成了一阶电路,由于反馈信号电路与电压型相比,减少了一阶,因此误差放大器的控制环补偿网络得以简化,稳定度
平均电流控制模式负载点电源(POL)的控制系统设计 摘要:设计了一种基于MAX5060并采用平均电流控制平均电流控制模式的DC/DC 变换器变换器的控制系统。该变换器为输出电压输出电压可调的负载点电源(POL),采用大信号系统和小信号系统相结合的方法设计控制回路。详细分析了电源的控制系统设计。关键词: POL 平均电流控制同步整流BUCK 随着CPU等超大规模集成电路的发展,所要求的工作电压在日趋下降,而供电电流则日趋上升,并要求负载点电源(POL)具有更高的动态性能。在当前的POL电源中,比较通用的主电路与控制策略是:主电路采用同步整流BUCK拓扑或多相交错BUCK电路;在控制策略方面,普遍采用电压型控制和峰值电流型控制。但是,由于电压控制模式不能控制各个电感的相电流,在多相BUCK中不能实现电流均衡的功能,而在单相BUCK中又需要额外的限流装置,并且对于输入电压的变化又响应较慢,由于这些原因,这种方案的缺点日益突出。峰值电流控制模式具有快速的负载动态响应,但对于噪声很敏感,并且占空比增加时,需要斜坡补偿。平均电流控制模式具有较多的优点:在多相变换器中,具有自动电流均衡的能力;采用电感电流作为反馈信号,并且在电流环电流环中引入一个高增益电流误差放大器,电流环的增益带宽可以通过设计这个电流误差放大器的补偿网络而达到最佳性能;与峰值电流控制模式的电流环频带相比,平均电流控制模式的电流环频带几乎与其相同,但低频增益却大很多;平均电感电流能够高度精确地跟踪电流编程信号;不需要斜坡补偿;抗噪声能力强。本文主要介绍平均电流控制模式同步整流BUCK变换器的控制系统的设计方法,分别从大信号系统和小信号系统分析和设计控制回路,实验结果表明该控制方法切实可行。1 平均电流控制BUCK变换器的大信号系统分析当系统负载电流发生较大变化时(如从25%额定值变化到100%额定值),系统处在大信号扰动下工作,小信号的假设不再适用,小信号分析法得到的设计结果将与大信号扰动下的系统响应不一致,可能出现的情况是:用小信号法设计的开关转换系统在小信号下是稳定的,但在大信号扰动下系统可能不稳定,因此小信号分析结果不能预测大信号扰动下系统工作的实际特性。造成这一差别的主要原因是系统的非线性,包括功率电路的开关非线性和控制电路脉冲调制器的饱和非线性。1.1 电流环增益限制条件一在平均电流控制模式下,为了避免误差放大器进入饱和状态以及由于电流补偿网络输出的电压波形不与锯齿波相交或多次相交而导致的次谐波瞬态不稳定,必须要求PWM比较器的两个输入信号的斜率满足以下条件:被放大的电感电流的下降斜率不能超过锯齿波的上升斜率,否则,PWM比较器将不能正常工作。此标准即为“斜率匹配标准”。若采用图1所示的RC电流环补偿网络,则电流环补偿网络的Hc(s)为: 为高频极点, 为满足斜率匹配标准,电流内环必须满足下式要求: 式中,Vm为锯齿波电压VS的峰值电压;RS是电流采样电阻;G1是电流采样信号的放大倍数;gmca是跨导型放大器的增益;VO和LO分别是BUCK变换器输出电压和输出滤波电感。即Rf 需满足: 1.2 电流环增益限制条件二在实际电路中,当变换器的输入电压升高或者占空比减小时,即使电流环增益已经满足了限制条件一的要求,变换器仍然可能出现开关不稳定,这与电流误差放大器(CEA)的输出信号VCA有关。假设VCA的纹波峰峰值为图2所示的
開關電源中的電流型控制模式 摘要:討論了開關電源中電流迴授控制模式的工作原理、優缺點,以及與之有關的斜波補償技術。關鍵詞:開關電源;電流型控制;斜波補償 1、前言 PWM型開關穩壓電源是一個閉迴路控制系統,其基本工作原理就是在輸入電壓、內部元件參數、外接負載等因素發生變化時,通過檢測被控制信號與基準信號的差值,利用差值調整主電路功率開關元件的導通脈波寬度,從而改變輸出電壓的平均值,使得開關電源的輸出電壓保持穩定。 以開關電源中的降壓型變換為例(其它類型如正激型、推挽型等,均可由降壓型衍生得到),圖1表示了該變換器的主電路的基本拓撲結構。 圖1降壓型開關電源 根據選用不同的PWM控制模式,圖1電路中的輸入電壓U in、輸出電壓U o、開關功率元件電流(可從A 點取樣)、輸出電感電流(可從B或C點採樣)均可作為控制信號,用於完成穩壓調整過程。 目前在開關電源中廣泛使用的控制方式是通過對輸出電壓或電流(功率開關元件或輸出電感上流過的電流)進行取樣,即形成2類控制方式:電壓控制模式與電流控制模式。
2電流控制模式的工作原理 圖2為檢測輸出電感電流的電流型控制的基本原理圖。它的主要特點是:將取樣得到的電感電流直接回授去控制功率開關的責任週期,使功率開關的峰值電流直接跟隨電壓迴授電路中誤差放大器輸出的信號。 從圖2中可以看出,與單一迴路的電壓控制模式相比,電流模式控制是雙閉迴路控制系統,外迴路由輸出電壓迴授電路形成,內迴路由電感器取樣輸出電感電流形成。在該雙迴路控制中,由電壓外迴路控制電流內迴路,即內迴路電流在每一開關週期內上升,直至達到電壓外迴路設定的誤差電壓閾值。電流內迴路是瞬時快速進行逐個脈衝比較工作的,並且監測輸出電感電流的動態變化,電壓外迴路只負責控制輸出電壓。因此電流型控制模式具有比起電壓型控制模式大得多的頻寬。 圖2檢測輸出電感電流的電流型控制原理圖 實際電路以單端正激型電源為例,如圖3所示。誤差電壓信號U e送至PWM比較器後,並不是像電壓模式那樣與振盪電路產生的固定三角波狀電壓斜波比較調寬,而是與一個變化的、峰值代表功率開關上的電流信號(由Rs上採樣得到)的三角狀波形信號(電感電流不連續)或矩形波上端疊加三角波合成波形信號(電感電流連續)比較,然後得到PWM脈衝關斷時刻。在電路中,電流的取樣通常使用一
平均电流模式控制Buck 电路小信号分析 平均电流模式控制在电池充电电路以及PFC 中有着广泛的应用。因其电流环和电压环均需补偿,故分析其小信号特性相当必要。本文将采用参考[1]的建模方法来分析平均电流模式下buck 电路的特性,给出了其简化等式,并利用K 因子方法设计了补偿电路。 一 电流环补偿设计 图一所示为电路的方框图及其小信号模型。占空比到输出以及到电感电流的传递函数为[2] 图一 电路方框图及小信号模型 其中 图二 Gvd 和Gid 传递函数 输入和输出的反馈为 从Vcl 到Ri V 的传递函数为 其中 因Go<<1,故上式简化形式为 其高频近似为
此处采用Type II 来补偿,参考[3][4]给出了避免电路不稳定的补偿中频增益的限制, 其中 选定中频增益后,电流环的交越频率也随之确定 利用K 因子法,确定补偿的零点为 则有 补偿的极点为 进而有 补偿的传函为 电流环传递函数为 图3 电流环bode 图 交越频率和相位裕量计算如下 二 电压环补偿设计 控制Vc 到输出的传递函数为 其近似为 其低频近似为 为了减少电流环对电压环的影响,后者交越频率要小于前者。
设定电压环交越频率 fc 利用K 因子法,确定补偿的零点为 补偿的极点为 补偿的传函为 则电压环传函为 图4 Gvc Bode 图 图5电压环bode 图
交越频率和相位裕量计算如下 参考: [1]. Philip Cooke." Modeling Average Current Control". Unitrode Integrated Circuits Corporation(TI).2005. [2].Doaer"buck". [3].Lloyd Dixon."Average Current Mode Control of Switching Power Supplies"Unitrode(TI) Application Note . [4].Jian Sun. Richard M.Bass."Modeling and Practical Design Issues for Average Current Control".1999 IEEE
开关电源电压型与电流型控制方式比较 河北科技大学电气工程学院 张刚 开关电源主要有两部分组成:控制器和功率级。功率级采用各种电力电子器件、电阻、电感、电容和变压器等实现期望电压输出。控制器实现期望输入电压的控制,是电源系统精度和稳定性的核心。其实质是控制PWM 的占空比实现期望输出,由于具体实现占空比调节的时反馈信号的取样方式不同,PWM 控制有电压型控制方式和电流型控制方式。网上总有网友对开关电源电压型控制与电流型控制的提问,回答的方式也各式各样,本人发表一下对该概念的理解,希望对同行有所裨益。 一、电压型控制方式 电压型控制方式出现较早, 该控制方式以电源的输出电压为反馈信号,该反馈信号与给 定值的偏差经比较器放大后与锯齿波比较产生控制脉冲。电压型控制方式的原理图如图1所示: V V r 图1 电压型PWM 控制原理图 电压型控制将输出电压与V R 参考电压V ref 的偏差信号e 经PI 型误差放大器与振荡器产生 的锯齿波进行比较,产生PWM 控制脉冲,其控制系统框图如图2所示: 图2 电压型PWM 控制系统框图 PWM 的输出占空比正比于控制电压,也就决定了输出电压其输出波形如图3所示。
CLO CK V e V T Q 图3 电压型PWM 控制输出PWM 波形 电压型控制方式的优点是: 1)单闭环控制简化了系统的分析与设计; 2)高增益斜坡输入提高了系统的噪声抑制; 3)低阻抗输出提高了系统的互联能力; 电压型控制的缺点: 1)负载输出电压变化后才进行调节,滞后性较大; 2)输出加入滤波器,增加了系统的复杂性。 二、电流型控制方式 电流型控制方式提出于80年代早期,在电压型控制的基础上,对电感电流增加一个内环,形成电压反馈信号组成外环,电压外环的输出偏差作为电流内环的给定,与电流反馈信号比较产生控制脉冲,控制系统结构框图如图4所示: 图4 电流型PWM 控制系统框图 电流型控制方式的实现原理图如图5所示: V V r 图5 电流型PWM 控制原理图
一种大电流输出的全桥DC/DC变换器平均电流控制模式控制分析 2009年09月21日作者:王少坤来源:《中国电源博览》编辑:樊晓琳 摘要:倍流整流电路能够降低变压器副边的电流,特别适合于大电流输出的应用。本文分析和研究了平均电流模式控制策略在带有倍流整流电路的大电流输出全桥DC/DC变换器中的应用。并进行了仿真和实验。 关键词:DC/DC变换器;电流控制;倍流整流 Abstract: The two inductor rectifier circuit offers reduced secondary side current rating and is most suitable for high current applications. The paper analysis of average current mode Control on a high current output FB DC/DC Converter with two inductor rectifier circuit. Simulations and experiments ensure the rightness of the method. Key Words: FB DC/DC Converter; Current-mode Control; Compensation Network 0 引言 相比电压控制模式控制,电流控制模式通过对电感电流的相位补偿,大大改善了电源的动态响应和并联特性。倍流整流(CDR)能够降低变压器副边的电流,减少其损耗;同时它有两个输出滤波电感,流经每个电感的电流只有负载电流的一半,输出滤波电感的损耗也小,特别适用于现今越来越多的需要大电流输出的场合。本文对一种带倍流整流电路的全桥 DC/DC变换器的平均电流模式控制进行了分析和仿真。 1 两种电流控制模式的优缺点比较 电流控制模式有两种类型:峰值电流模式控制(PCMC)和平均电流模式控制(ACMC)。 峰值电流模式的优点是控制具有内在的输入电压反馈,逐个脉冲峰值电流限制和在保证隔离变压器磁芯的磁通平衡;但其缺点是易受噪声干扰,具有平均电流误差和需要斜坡补偿。平均电流模式则由于其显著优点得到了广泛应用, ○1跟踪电流设定值。这点应用在高功率因数控制电路中尤其重要,此时用一个小电感就能获得小于3%的谐波畸变,并且即使电路模型由连续电流模式过渡到不连续电流模式,平均电流法也能很好地工作;②噪声抑制能力强,因为当时钟脉冲使功率开关管开通后,晶振幅度迅速降到了一个低值; ③无须斜坡补偿,但为了电路工作稳定,在开关频率附近必须限定环路增益; ④平均电流法可应用在任意电路拓扑上,既能控制Buck 和Flyback 电路的输入电流,又能控制Boost 和Flyback 电路的输出电流。 2 带有倍流整流电路的全桥DC/DC变换器电路拓扑