第八章非线性控制系统分析
l、基本内容和要求
(l)非线性系统的基本概念
非线性系统的定义。本质非线性和非本质非线性。典型非线性特性。非线性系统的特点。两种分析非线性系统的方法——描述函数法和相平面法。
(2)谐波线性化与描述函数
描述函数法是在一定条件下用频率特性分析非线性系统的一种近似方法。谐波线性化的概念。描述函数定义和求取方法。描述函数法的适用条件。
(3)典型非线性特性的描述函数
(4)用描述函数分析非线性系统
非线性系统的一般结构。借用奈氏判据的概念建立在奈氏图上判别非线性反馈系统稳定性的方法,非线性稳定的概念,稳定判据。
(5)相平面法的基本概念
非线性系统的数学模型。相平面法的概念和内容。相轨迹的定义。
(6)绘制相轨迹的方法
解析法求取相轨迹;作图法求取相轨迹。
(7)从相轨迹求取系统暂态响应
相轨迹与暂态响应的关系,相轨迹上各点相应的时间求取方法。
(8)非线性系统的相平面分析
以二阶系统为例说明相轨迹与系统性能间的关系,奇点和极限环的定义,它们与系统稳定性及响应的关系。用相平面法分析非线性系统,非线性系统相轨迹的组成。改变非线性特性的参量及线性部分的参量对系统稳定性的影响。
2、重点
(l)非线性系统的特点
(2)用描述函数和相轨迹分析非线性的性能,特别注重于非线性特性或线性部分对系统性能的影响。
8-1非线性控制系统分析
1研究非线性控制理论的意义
实际系统都具有程度不同的非线性特性,绝大多数系统在工作点附近,小范围工作时,都能作线性化处理。应用线性系统控制理论,能够方便地分析和设计线性控制系统。
如果工作范围较大,或在工作点处不能线性化,系统为非线性系统。线性系统控制理论不能很好地分析非线性系统。
因非线性特性千差万别,无统一普遍使用的处理方法。
非线性元件(环节):元件的输入输出不满足(比例+叠加)线性关系,而且在工作范围内不能作线性化处理(本质非线性)。
非线性系统:含有非线性环节的系统。
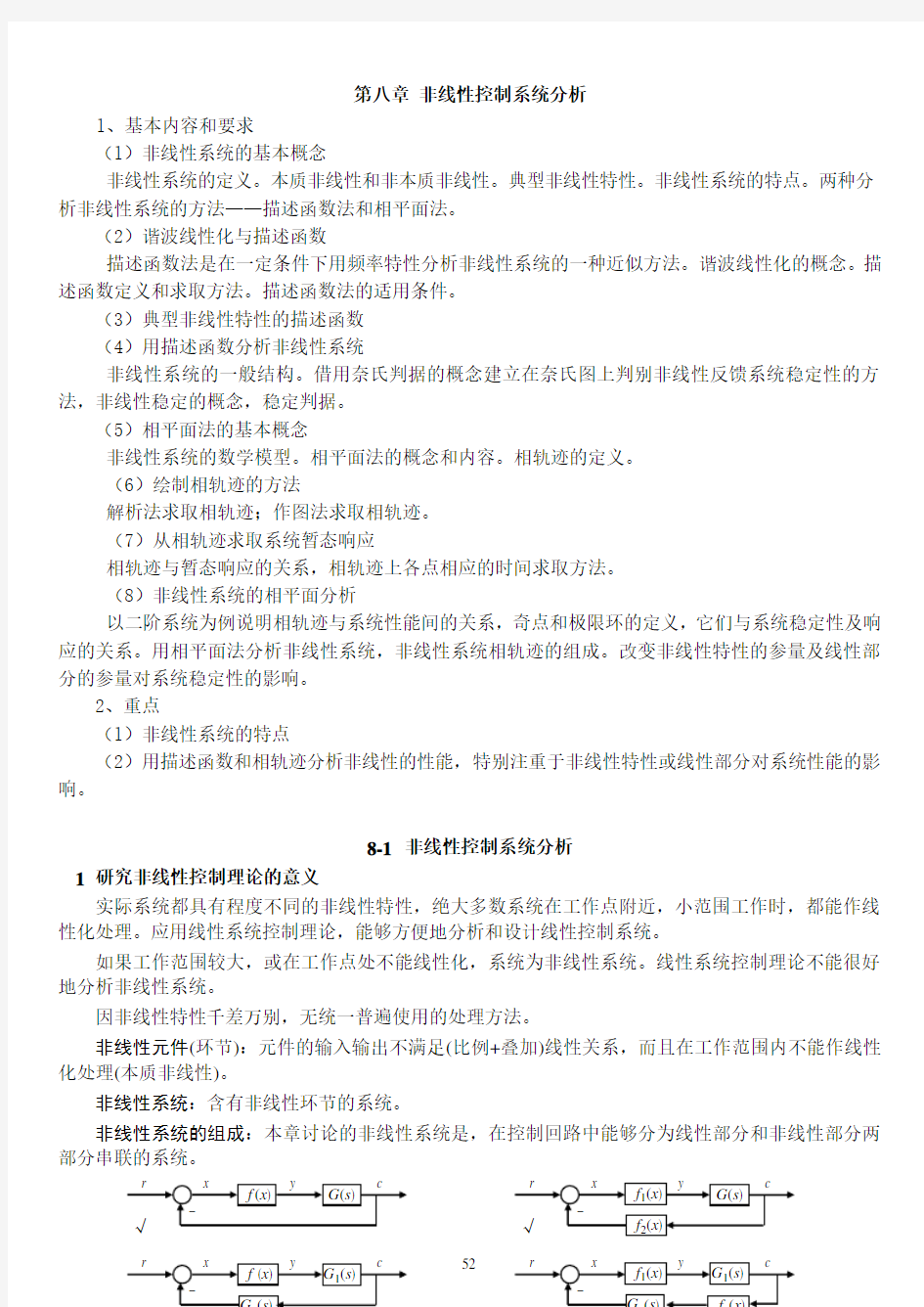
非线性系统的组成:本章讨论的非线性系统是,在控制回路中能够分为线性部分和非线性部分两部分串联的系统。
2 非线性系统的特征
2.1 不能用线性(微分)方程描述;方框图中,非线性环节不能随意移动(不能保持信号等效); 2.2 运动形式)(t c 不仅与系统特性和)(t r 有关,而且还与系统的初始状态有关;有的系统会出现
自振荡; 自持振荡:系统在无外部信号作用下维持的振荡,又称自激振荡,简称自振荡。线性系统只有在临界
阻尼情况下才可能有自振荡。
2.3 稳定性分析复杂;系统的稳定性不仅与系统结构参数有关还与系统的初始状态有关; 2.4 频率响应有畸变;输入信号是正弦信号时,系统的稳态输出不是正弦信号,而是多种频率的
正弦信号组合。 3 非线性系统的分析与设计方法 3.1 ☆相平面法 3.2 ☆描述函数法 3.3 逆系统方法
这三种方法将在8-3、8-4和8-5节讨论。
8-2 典型非线性特性及其对系统运动的影响
非线性特性千差万别,在工程上允许用折线近似替代曲线,只要直线线段足够短,就有满意的近似精度。那么,通常的非线性环节都可以用多个典型非线性特性串联和并联组合而成。
非线性特性的数学表达式和输入输出关系曲线都很重要。 1 非线性特性的等效增益
设非线性环节的输出为y ,输入为x ;输入输出关系为)(x f y =,是非线性函数; 等效增益记为: x x f x y k /)(/==。
有人将非线性系统看作是“变增益的线性系统”,简化非线性系统稳定性的分析过程。
2 ☆典型非线性特性对系统运动的影响
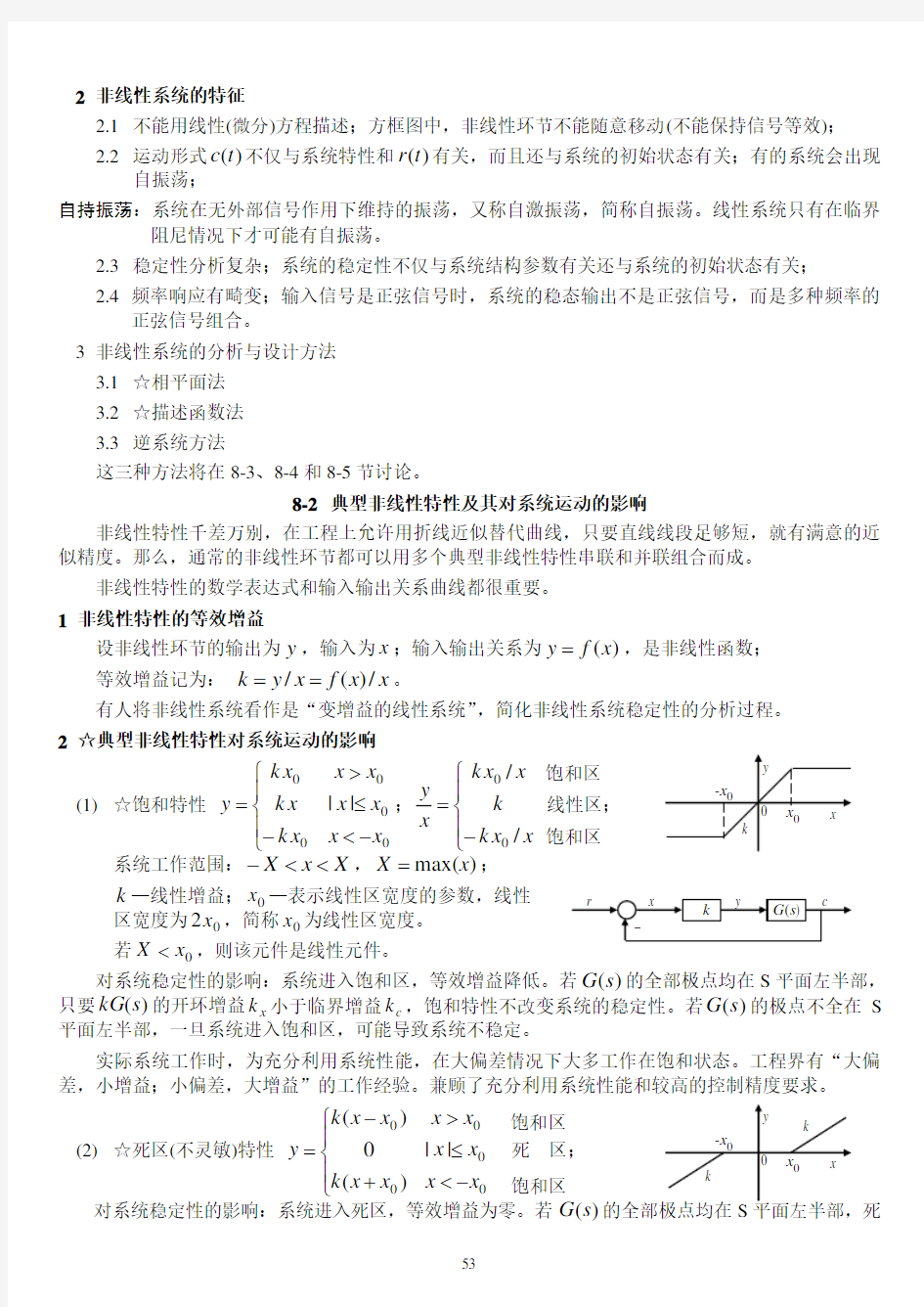
(1) ☆饱和特性 ???
??-<-≤>=00000||x x x k x x x k x x x k y ;??
???-=x
x k k x x k x y //00 线性区; 系统工作范围:X x X <<-,)max(x X =; k —线性增益;0x —表示线性区宽度的参数,线性区宽度为02x ,简称0x 为线性区宽度。 若0x X <,则该元件是线性元件。
对系统稳定性的影响:系统进入饱和区,等效增益降低。若)(s G 的全部极点均在S 平面左半部,只要)(s kG 的开环增益x k 小于临界增益c k ,饱和特性不改变系统的稳定性。若)(s G 的极点不全在S
平面左半部,一旦系统进入饱和区,可能导致系统不稳定。
实际系统工作时,为充分利用系统性能,在大偏差情况下大多工作在饱和状态。工程界有“大偏差,小增益;小偏差,大增益”的工作经验。兼顾了充分利用系统性能和较高的控制精度要求。
(2) ☆死区(不灵敏)特性 ?????-<+≤>-=00000)(||0)(x x x x k x x x x x x k y 死 区; 对系统稳定性的影响:系统进入死区,等效增益为零。若)(s
区特性不改变系统的稳定性,只是降低了控制精度。若)(s G 的极点不全在S 平面左半部,通常会产生自振荡,这是工程中不满意的状态。
在工程实践中,只要系统满足控制精度要求(稳态误差在允许误差范围内),尽可能利用死区特性减少控制器的动作,其实际物理意义是减少能量损耗和设备磨损。 (3) ☆继电特性 (3-1)
理想继电特性 ??
?<->=0
x M
x M y ; 理想继电器: (3-2)
??
?
??-<-≤>=
0||0
x x M
x x x x M (3-3)
仅具有滞环的继电特性
???<->=0
0x x
M
x x M y 或
00&0&0x x x
x x x
<>
->< ;
(3-4) 一般继电特性 ?
?-<-≤>=h
x M m h x h x M
y ||0 或x x >( 0=h :理想继电特性;1=m :仅具有死区的继电特性;1-=m :仅具有滞环的继电特性。
(4) 间隙(齿隙)特性 ??
?
??<+==>-=0)(000)(00y x x k y y y
x x k y ; (5) 摩檫特性 ??
?>-<=00x
M
x
M
y ; 8-3 相平面法
相平面法是在非线性系统线性部分的阶次小于等于二阶时的图解分析方法,该方法将系统(非线性
环节的输入信号)运动姿态绘制在相平面上,直观清、楚地反映系统的稳定性、平衡状态、稳定精度和有无自振荡;使用相平面法分析系统的稳定性很方便。在应用相平面法分析系统稳定性时,都将典型输入的作用等价为系统的初始状态,假定系统输入恒为零,即分析系统的自由运动特性。 1
相平面的基本概念
☆二阶非线性系统: 0),(=+x x f x
,0)0(x x =,0)0(x x =; 式中 是x 和x 的非线性函数或线性函数 ☆ 相平面法: 求解二阶非线性系统的图解方法,用于分析系统稳定性。 ☆ 相变量: 二阶系统中的x 和x
称为相变量 。 ☆ 相平面: x
x -平面;横坐标为相变量x ;纵坐标为相变量x 。 ☆相轨迹:
x
x -平面上的点表示系统在给定初始状态时,某一时刻的状态。系统运动在相平面上留下的轨迹,是一条具有方向的曲线,称为相轨迹。
△相轨迹斜率:
x x t d x d t d x d x d x d ==/。可得x
d x
d x x =,代入系统(运动)方程,得到相轨迹方程。
☆相轨迹方程(斜率):
x x x f x d x d ),(-=。x 轴上某点使得00=x d x
d ,其斜率值不确定,称为奇点。 相轨迹特点:(1) 相平面上半部,0>x
,相轨迹都是向右方运动; (2) 相平面下半部,0 ,相轨迹都是向左方运动; (3) 在x 轴上,除奇点外,±∞=x d x d / ,相轨迹垂直穿过横轴; (4) 同一个系统的不同起点的相轨迹互不相交;若一条相轨迹的起点在另一条相轨迹 上,该条相轨迹是那条相轨迹的一部分。 若能够得到非线系统0),(=+x x f x 的解)(t x 和)(t x ,则以t 为参变量在相平面上绘出相轨迹。 多数情况下,求解)(t x 很烦琐,绘制相轨迹也是件令人讨厌的事情,幸亏我们只是分析非线性系统的 稳定性,只需要相轨迹的趋势和终点。 若0),(=+x x f x 是变量可分离的微分方程,能够采用以下解法: x d x d x x =;)() (),(x g x h x x f =-; dx x h x d x x g )()(= ,??=x x x x x d x h x d x x g 00)()(。 说明:解得)(t x 和)(t x ,就可以得知系统的稳定性、平衡状态和稳定精度,不必绘制相轨迹图。 绘制相轨迹的基本方法:(仅含典型非线性环节的系统,能方便地解得)(t x ) 根据)(t x 和)(t x 的表达式,逐点描绘,∞→0:t 。 概略绘制相轨迹要点:(1) 相轨迹起点),(00x x ; (2) 与横轴的交点)0)((=i t x ; (3) 与纵轴的交点)0)((=j t x ; (4) 在讨论非线性系统时,与分区边界的交点: =)(t x 边界值,计算)(t x 值,或=)(t x 边界值,计算)(t x 值; (5) 按相应的线性系统相轨迹连接标出的各点。 2 绘制相轨迹的等倾线法 等倾线法是绘制相轨迹的近似方法,避免求解非线性微分方程。 在相轨迹方程 x x x f x d x d ),(-=中令α=x d x d , 。得等倾线方程α=-x x x f ),(; 等倾线—在相平面上相轨迹斜率相同点的连线。 例 系统0=++x x x ,00=x ,B x =0 ;试用等倾线法绘制相轨迹。 解:相轨迹斜率方程 x x x x d x d +-=;等倾线方程α=+- x x x ;整理得x x α+-=11 ,这是一条斜率为 α +-11 的直线,α取不同值时,是一簇过原点的直线。参见P362页图8-17。 作图:选取适当的一系列α值,使等倾线在相平面上分布均匀,并具有合适密度。若要分析系统稳定 性可在等倾线上均匀画出与其α值对应的短直线,若短直线相连就会形成相轨迹簇。本例,起点在x 轴上,开始画一1-=α的短线,直到下一条等倾线,再按对应的α值,画短线,循此继进,直到画不清楚或画不出为止。 3 线性系统的相轨迹 研究线性系统的相轨迹是用相平面法分析非线性系统的基础。 (1) 线性一阶系统的相轨迹: (a) 0=-c c T ;相轨迹簇在两条起始于原点斜率为T /1的直线上,见图8-14(a),系统不稳定; (b) 0=+c c T ;相轨迹簇在两条起始于原点斜率为T /1-的直线上,见图8-14(b),系统稳定。 (2) 线性二阶系统的相轨迹:022 =++x x x n n ωζω ,相轨迹形状与阻尼比ζ有关; 相轨迹斜率x x x x d x d n n 2 2ωζω+- =;相轨迹起点),(00x x ;奇点)0,0(; (a) 10<<ζ:)sin()(φωσ+=-t Ae t x d t ,)cos()sin()(φωωφωσσ+++-=-t A t e A t x d d d t ; 式中 n ζωσ=,2/12)1(ζωω-=n d ;0sin x A =φ,0cos sin x A A d =+-φωφσ。 相轨迹是一簇螺旋线,起始于初始状态,终止于奇点。系统稳定。 系统具有一对负实部复数极点,奇点)0,0(称为稳定焦点。参见图8-17。 (b) 1>ζ:t t e A e A t x 2121)(λλ+=,t t e A e A t x 212211)(λλλλ+= ; 式中 2/121)1(-+-=ζωσλn ,2/122)1(---=ζωσλn ;021x A A =+,02211x A A =+λλ。 相轨迹是一簇抛物线,起始于初始状态,终止于奇点。系统稳定。 系统具有两个负实极点,奇点)0,0(称为稳定节点。参见图8-18。 该条件下:有两条等倾线的斜率与其对应的相轨迹斜率相等。 若初始状态(起点)满足010x x λ= 或020x x λ= ,则有: ??? ??===) ()()()(111111t x t x e A t x e A t x t t λλλλ 或 ??? ??===) ()()()(222222t x t x e A t x e A t x t t λλλλ ; 这表达了4条趋于奇点的相轨迹(有两条过原点的等倾线),称为渐近线(奇线);所有相轨迹不与渐近线相交。 (c) 1=ζ:t n e B At t x ω-+=)()(,t n n e A B At t x ωω--+-=)()( ;0x B =,`00/x x A n +=ω ; 相轨迹是一簇曲线,起始于初始状态,终止于稳定节点。系统稳定。 等倾线方程为x x n n α ωω+-=22 ;渐近线条件αωωα+- =n n 22;得n ωα-=; 当初始状态(起点)满足00x x n ω-= ,相轨迹沿直线趋于奇点。参见图8-20。 (d) 0=ζ:)sin()(φω+=t A t x n ,)cos()(φωω+=t A t x n n ;0sin x A =φ,0cos x A n =φω; 易知:22 22/A x x n =+ω ,这是椭圆方程;相轨迹是一簇以原点为中心点的椭圆,起始于初 始状态,无终止点。系统不稳定(临界稳定)。 系统具有一对纯虚数极点,奇点)0,0(称为中心点。参见图8-21。 (e) 01<<-ζ:)sin()(φωσ+=-t Ae t x d t ,)cos()sin()(φωωφωσσ+++-=-t A t e A t x d d d t ; 式中 0<=n ζωσ,2 /12)1(ζωω-=n d ;0sin x A =φ,0cos sin x A A d =+-φωφσ。 相轨迹是一簇螺旋线,起始于初始状态,趋于无穷远,反向延长交于奇点。系统不稳定。 系统具有一对正实部复数极点,奇点)0,0(称为不稳定焦点。参见图8-22。 (f) 1-≤ζ:t t e A e A t x 2121)(λλ+=,t t e A e A t x 212211)(λλλλ+= ;01>λ,02>λ; 式中 2/121)1(-+-=ζωσλn ,2/122)1(---=ζωσλn ;021x A A =+,02211x A A =+λλ。 相轨迹是一簇抛物线,起始于初始状态,趋于无穷远,反向延长交于奇点。系统不稳定。 系统具有两个正实极点,,奇点)0,0(称为不稳定节点。参见图8-23。 (g) 线性二阶系统022=-+x b x a x ; 相轨迹斜率x x b x a x d x d 22--=;相轨迹起点),(00x x ;奇点)0,0(; 等倾线方程为α+=a x b x 22 ;渐近线条件αα+=a b 22 ;得0 )(0)(2 /12222/1221<+--=>++-=b a a b a a αα; 系统具有符号相反的两个实极点,奇点)0,0(是不稳定的,称为鞍点。相轨迹参见图8-15。 当0=b ,相轨迹退化为斜线,参见图8-16。 4 奇点和奇线(渐近线),略,已讲过。 对于一般非线性系统,先要得到奇点邻域的线性化相轨迹方程,再判断奇点的类型。(P366,例8-2) 极限环 非线性系统的持续振荡在相平面的曲线称为(稳定的)极限环。 5 由相轨迹求取时间间隔(略) 相轨迹图虽未直接表示系统运动与时间的关系,但从相轨迹上可近似求得相轨迹上两点间的时间间隔。 (a) 解析法:若有)(t x 和)(t x 的解析表达式(包括分区的表达式),能够得到)(t x ,可准确地获得时间间隔。 例如 已知相轨迹是椭圆方程22 22/A x x n =+ω ,则)sin()(φω+=t A t x n ,φ与起点有关。 (b) 增量法:用一系列短直线段近似替代相轨迹,各段起点),(11x x 到终点),(22x x 所需时间为 x x x t /)(12-=?,2/)(12x x x +=。 (c) 积分法:??== ?2 1 2 1 /1t t x x dx x t d t ;图解值,参见图8-26。 (d) 圆弧)(δ法:用一系列圆心在x 轴上的短圆弧近似替代相轨迹,各段起点),(11x x 到终点 ),(22x x 所需时间为该段圆弧所对的圆心角θ?=?t 。参见图8-27。 说明:如果相轨迹图的精度有限,只能得到时间间隔的近似值。要点:应用两个非线性系统的相轨迹 比较两系统的时间关系。例如: 6 非线性系统的相平面分析 典型非线性环节都是“分区线性”的,那么,由典型非线性环节和线性部分组成的非线性系统也是“分区线性”的。因此,只要掌握各区线性运动方程及对应奇点的类型,不难参照线性系统相轨迹,做出该区的概略相轨迹。再根据相轨迹图,就可以判断系统的稳定性。 以三个例子说明分析方法。 (1) 具有死区特性的非线性系统(图8-28,图8-29) 系统初始状态为零,)(1)(t R t r ?=;等价为 R e =0,00=e ; 非线性环节 ?? ???>-≤-<+=0)0000(||0)(x e x e k x e x e x e k u ;线性部分 Ku c c T =+ ;及?????-=-=-=c r e c r e c r e ,00==r r ; 0=++Ku e e T ; 两条分区边界(开关线)0x e ±=; Ⅰ区)(0x e -<: 0Kkx Kke e e T -=++ ;)/()(/0e T Kkx Kke e de e d ++-=; 奇点)0,(0x -,若奇点在本区,称为实奇点,否则称为虚奇点;相轨迹永远不能到达虚奇点。 当25.0>TKk 时,本区相轨迹是趋于稳定焦点的螺旋线,相轨迹必然进入Ⅱ区。否则,是趋于稳定节点的抛物线,有可能进入Ⅱ区。 Ⅱ区)|(|0x e ≤: 0=+e e T ;T de e d /1/-= ; 无奇点,相轨迹满足方程T e e /-= ,是斜率为T /1-的斜线,斜线与线段),(00x x -的交点是相轨迹的终点。该区下部的相轨迹可能进入Ⅰ区;上部的相轨迹可能进入Ⅲ区。 Ⅲ区:)(0x e > 0Kkx Kke e e T =++ ; )/()(/0e T Kkx Kke e de e d -+-=;本区分析类似Ⅰ区。 奇点)0,(0x ; 当25.0>TKk 时,本区相轨迹是趋于稳定焦点的螺旋线,相轨迹必然进入Ⅱ区。否则,是趋于稳 定节点的抛物线,有可能进入Ⅱ区。 稳定性分析)1(>K :无论初始状态如何,相轨迹必然终止于区间),(00x x -上,非线性系统稳定。稳态误差绝对值0x ≤。 绘制概略相轨迹(略) (2) 具有饱和特性的非线性系统(图8-30,图8-31,图8-32) 系统初始状态为零,分别讨论系统在)(1)(t R t r ?=和)(1)(t t V t r ?=时的稳定性。 非线性环节?????>≤-<-=00000||x e x k x e ke x e x k u ;线性部分Ku c c T =+ ;及??? ??-=-=-=c r e c r e c r e ,00)(1)(==?=r r t R t r ;0)(==?=r V r t V t r ; 两条分区边界(开关线)0x e ±=; )(1)(t R t r ?=:0=++Ku e e T ; Ⅰ区)(0x e -<: 0Kkx e e T =+ ; 等倾线方程)1/(0αT x Kk e += ,平行于e 轴的直线;渐近线0x Kk e = ;渐近线在e 轴的上方; 本区无奇点,所有相轨迹必然进入Ⅱ区。 Ⅱ区)|(|0x e ≤: 0=++Kke e e T ; 奇点为原点)0,0(,是实奇点;当25.0>TKk 时,本区相轨迹是趋于稳定焦点的螺旋线。否则, 是趋于稳定节点的抛物线。 系统相轨迹的末段一定在本区,终止于实奇点)0,0(。 该区下部的相轨迹可能进入Ⅰ区;上部的相轨迹可能进入Ⅲ区。 Ⅲ区:)(0x e > 0kx e e T -=+ ; 本区分析类似Ⅰ区。 等倾线方程)1/(0αT x Kk e +-= ,平行于e 轴的直线;渐近线0x Kk e -= ;渐近线在e 轴的下方; 本区无奇点,所有相轨迹必然进入Ⅱ区。 稳定性分析:响应阶跃输入时,无论初始状态如何,相轨迹必然终止于原点,非线性系统稳定。 稳态误差为零。 t V t r ?=)(:)0(>V ;V Ku e e T =++ ; Ⅰ区)(0x e -<: V Kkx e e T +=+0 ; 等倾线方程)1/()(0αT V x Kk e ++= ,平行于e 轴的直线;渐近线V x Kk e +=0 ; 本区无奇点;渐近线在e 轴的上方,所有相轨迹必然进入Ⅱ区; Ⅱ区)|(|0x e ≤: V Kke e e T =++ ; 奇点为)0),/((Kk V ;若0)/(x Kk V <为实奇点;若0)/(x Kk V >为虚奇点; 本区相轨迹是趋于稳定奇点曲线。 奇点为实奇点时。系统相轨迹的末段可能在本区终止于实奇点。 该区下部的相轨迹可能(必然)进入Ⅰ区;上部的相轨迹可能(必然)进入Ⅲ区。(虚奇点) Ⅲ区:)(0x e > V Kkx e e T +-=+0 ; 本区分析类似Ⅰ区。本区无奇点; 等倾线方程)1/()(0αT V x Kk e ++-= ,平行于e 轴的直线;渐近线)(0V x Kk e --= ; 若00>-V Kkx ,即Ⅱ区有实奇点,渐近线在e 轴的下方,所有相轨迹必然进入Ⅱ区;若Ⅱ区有虚 奇点,渐近线在e 轴的上方,渐近线上方的相轨迹趋向无穷远;下方相轨迹趋于渐近线,或进入Ⅱ区,或趋向无穷远。 若V x Kk =0时,相轨迹方程T e e /-= ;该区的相轨迹将终止于e 轴上,或进入Ⅱ区。 稳定性分析:响应速度输入时,系统稳定性与V 值有关;若0Kkx V <(Ⅱ区有实奇点),系统稳定, 稳态误差为)/(Kk V ;若0x Kk V >(Ⅱ区有虚奇点),系统不稳定;若V x Kk =0时,系统临界稳定,稳态误差大于0x 。 (3) 具有滞环继电特性的非线性系统(图8-33,图8-34,图8-35) 试分析系统在 非线性环节?? ?-<->=h e M h e M u 或h e e h e e <>-><&0&0 ;线性部分Ku c c T =+ ; 0=τ:c e -=,c e -=;由于非线性环节有两个分区,相平面e e -分为两个线性区。开关线由三条直线线段组成:h e -=,0 ;h e h <<-,0=e ;h e =,0>e 。 Ⅰ区)(h e -<和)&0(h e e <> :0=-+KM e e T ; 相轨迹方程 e T KM e e d e d -- =;无奇点;等倾线方程αT KM e +=1 ;渐近线0=α,KM e = ; 解析解:t KM Te KM e T KM e e e T t +---+=-/000)()( ,KM e KM e e T t +-=-/0)( ; 该区的相轨迹都趋于渐近线),(KM e e →∞→ ,必然进入Ⅱ区。 Ⅱ区)(h e >和)&0(h e e ->< :0=++KM e e T ; 相轨迹方程e T KM e e d e d +-=;无奇点;等倾线方程α T KM e +-=1 ;无奇点;渐近线0=α,KM e -= ; 解析解:t KM Te KM e T KM e e e T t -+-++=-/000)()( ,KM e KM e e T t -+=-/0)( ; 该区的相轨迹都趋于渐近线),(KM e e →∞→ ,必然进入Ⅰ区。 若状态处于e 轴的),(h h -区间上,是不稳定平衡状态。因±∞=α,相轨迹必趋向渐近线。 运动状态分析:Ⅰ区的相轨迹必然进入Ⅱ区,Ⅱ区相轨迹必然进入Ⅰ区,运动不会停止;Ⅰ区的相 轨迹在返回Ⅰ区时,相轨迹与分界(开关)线h e -=的交点处,KM e -> ;Ⅱ区的相轨迹在返回Ⅱ区时,相轨迹与分界线h e =的交点处,KM e < ;相轨迹不与线段),(h h -相交。最终相轨迹形成闭合曲线,称为极限环。内外的相轨迹都趋向闭合曲线的极限环称为稳定的极限环。 稳定性分析:无论初始状态如何,系统最终进入稳定的极限环。 极限环振幅和频率计算:根据系统进入极限环状态后,每次进入Ⅱ区的入口点为),(2r e h ,再根 据极限环的对称性可知,进入Ⅰ区的入口点为),(2r e h --;在Ⅱ区的相轨迹满足Ⅱ区的运动方程,入 口点为方程的初始状态,而终点为Ⅰ区的入口点。可推导出 r r r e KM e KM KMT e T h 222ln )(2 -+=+,显然KM e r <2 。 例 系统参数为1=h 、2=M 、2=T 和1=K ;计算得 53955.12=r e ; Ⅱ区的运动方程:t e e t 2)1(0791.712 /--+=-,253955.32/-=-t e e ;据相轨迹与e 轴交点, 计算出振幅79569.1=E ;由分界线h e -=的交点,计算出在该区运行时间0791.42=T 。 振幅为79569.1,周期为1582.8秒。 0>τ:相平面e e -分为两个线性区。由于非线性环节的输入为e e τ+,组成开关线的三条线段为: h e e -=+ τ,0 e -<+ τ和)0&(><+e h e e τ:0=-+KM e e T ; Ⅱ区)(h e e >+ τ和)0&(<->+e h e e τ:0=++KM e e T ; 由于两区的线性运动方程完全与0=τ时的对应区运动方程相同,各区的运动规律对应相同。区别在与开关线不同,对于同一初始状态进入另一区域的时间不同,0>τ时提前进入。 显然,0>τ时极限环的振幅要小于0=τ时的振幅(最小值为h ),振荡频率要高。改善了非线性系 统的性能; 思考题:如何减小h 对系统的影响? 8-4 描述函数法 非线性环节在正弦输入作用下输出是一次谐波和高次谐波的组合信号,一次谐波是与输入信号同频率的正弦信号。若非线性环节的输出可以用一次谐波近似,可得到非线性环节的描述函数。 描述函数法:是在频域内分析系统的稳定性和自振荡的一种近似方法。 1 描述函数的基本概念 描述函数:非线性环节的近似频率特性;(频率响应可用一次谐波近似。) (1) 描述函数的计算方法 非线性环节及其正弦输入为 )(x f y =;t X t x ωsin )(=;则环节输出的傅立叶级数为 ∑∑∞ =∞=++=++=101 0)sin()sin cos (n n n n n n t Y A t B t A A y φωωω; 式中 0A —直流分量;)sin(n n t Y φω+— n 次谐波,且2 /122)(n n n B A Y +=,)/arctan( n n n B A =φ; ?-=ππωπt d t y A )(210;?-=π πωωπt d t n t y A n )cos()(1;? -=ππ ωωπt d t n t y B n )sin()(1。 当非线性环节关于原点对称(00=A ),而且n Y )1(>n 比1Y 小得多时,则近似为 )sin(sin cos 11φωωω+=+≈t Y t B t A y 描述函数定义为 X jA B e X Y e X N X N j A N j 11) (|)(|)(+===∠φ。 例 8-3 计算理想继电特性的描述函数。???><-=0 )(x M x M x y ,t A x ωsin =。 解:该非线性特性关于原点对称,00=A ;t t y ωcos )(是奇函数,01=A ; πθ πωωπωωππππ M M t d t M t d t t y B 4cos 4sin 4sin )(2 2 /02 /001= - == = ??;A M A jA B A N π4)(11=+= 。 说明:第一等号因t t y ωsin )(是偶函数成立;第二等号利用在),0(π区间上t ωsin 关于2/π对称。 作为解释计算 02=i Y ,?+=+=+=+ππθθπ011212)12(4])12sin[(2i Y i M d i M Y i , ,2,1=i ; 3/Y Y n ≤,1>n 。 查数学手册的定积分表得到? ??=-=--=-? 7,5,3,106,4,2,0)(2)cos()sin(1220n m n m n m m x d nx mx π 例 8-4 计算非线性元件325.05.0x x y +=的描述函数。P375。 解:关于原点对称,00=A ,t t y ωcos )(是奇函数,01=A ; 16 32}sin 4sin 2{4sin )(232/04 3201A A t d t A t A t d t t y B + =+==??ππωωωπωωπ; 2 1116 321)(A A jA B A N +=+=。 (2) 应用描述函数法的条件 (2-1) 非线性系统能够简化成一个非线性环节与一个线性环节闭环的串联结构;参见图8-36。 (2-2) 非线性特性原点对称,即00=A ; (2-3) 1,1>< 忽略次要因素,利用线性系统的频率分析方法近似分析非线性系统,简化分析过程。 必须注意 正弦信号幅度的函数,却与输入频率无关。 2 典型非线性特性的描述函数 (1) ☆饱和特性:)(x y 是奇函数; ???<≤<≤=2/0sin )(0πθψψθθ x k kA t y ;)/arcsin(sin 00A x x A ==ψψ; sin sin {4sin )(42/002 2/01???+==πψψπθθθθπθθπd A x d kA d t y B ?? ? ???????-+=+-=??20002/001)(1arcsin 2}sin )2cos 1(21{4A x A x A x kA d A x d kA B πθθθθππψψ; ??????-+ =2000)(1arcsin 2)(A x A x A x k A N π,0x A ≥。 (2) ☆死区特性:)(x y 是奇函数; ??? <≤-<≤=2/)sin (00)(0πθψθψθx A k t y ;/arcsin(sin 00A x x A ==ψψ}sin {sin 4sin )(42/02 2/01θθθπθθππψπd A x kA d t y B ??-==; ? ?????---=--= ?20002 /01)(1arcsin 22}sin )2cos 1(21{4A x A x A x kA d A x kA B π πθθθπ πψ ; ?? ? ?????? ?---=2000)(1arcsin 22)(A x A x A x k A N ππ,0x A ≥。 (3) ☆继电特性:非线性特性关于原点对称,)(t y 既 不是奇函数也不是偶函数。 ?? ???<≤<≤<≤=π θψψθψψθ2211 000)(M t y ;)/arcsin()sin()/arcsin(sin 2211A m h m h A A h h A ==-==ψψπψψ; )1(2sin 2cos 221211-===?m A Mh M d M A πθπθθπψψψψ; ? ?????-+-=-==?221)(1)(12cos 2sin 22121A h A m h M M d M B πθπθθπψψψψ; )1(2)(1)(12)(2 22-+??????-+-= m A Mh j A h A m h A M A N ππ,h A ≥。 当0=h 时,理想继电特性的描述函数 A M A N π4)(=,h A ≥; 当1=m 时,死区继电特性的描述函数2)(14)(A h A M A N -=π,h A ≥; 当1-=m 时,滞环继电特性的描述函数 224)(14)(A Mh j A h A M A N ππ--=,h A ≥。 3 非线性系统的简化 当非线性系统是由多个非线性环节和线性环节组合而成时,需要等效变换成由一个非线性环节和 一个线性环节连接成的闭合回路,便于分析。变换的要点是保证信号等效,主要应用解析表达式。 (1) 并联非线性环节的等效特性 ?? ???>≤-<-=101010 1||0 x x M x x x x M y ;?? ? ??>-≤-<+=20202020202)(||0)(x x x x k x x x x x x k y ;21y y y +=; )()()(21A N A N A N +=; 2010x x >,??????≤<-≤-<≤-+-<-+=102020202010201020)(||0)()(x x x x x k x x x x x x x k x x M x x k y ;1020x x >,?? ??? ?≤<≤-<≤---<-+=20101010202020||0)(x x x M x x x x x M x x M x x k y ; (2) 串联非线性环节的等效特性 2121y y y x x x ===;???? ?>-≤-<+=101011101010111)(||0)(x x x x k x x x x x x k y ; ??? ??>≤-<-=20220 2202222022022||x x x k x x x k x x x k y ;)()()(12A N A N A N ?≠; )/()()/()(120102020101120102020101k x x x x x x x k k x x x x x x x k +=>>-+-=-<-<+;????? ??? ?>≤<-≤-<≤-+-<-=2020 220 10101210102010122020 2)(||0)(x x x k x x x x x k k x x x x x x x k k x x x k y ; 等效非线性环节的描述函数计算:)(t y 是奇函数,00=A ,01=A ; ?? ? ?? <≤<≤-<≤=2/)sin (00)(22022110211πθψψθψθψθx k x A k k t y ;)/arcsin(sin )/arcsin(sin 202202101101A x x A A x x A ====ψψψψ; ? ?????+-==???212 2/1201022 /0211sin )sin (sin 4sin )(4ψψπψπθθθθθπθθπd A k x d A x A k k d t y B ()??? ???? ???-+-=2/1201021221 21cos cos sin 1214πψψψψψθθθπA k x A x A k k ?? ? +-+---=2101022020102021)(1)(1arcsin arcsin 2A x A x A x A x A x A x A k k π ? ??-+---2201202101022010)(12)(12)(12A x A k x A x A x A x A x ; 注意到)22/2(2010120x x k x =+,整理后,得到: ? ????? ---+-= 21010220201020211)(1)(1arcsin arcsin 2A x A x A x A x A x A x A k k B π; ?????? ---+-=2101022020102021)(1)(1arcsin arcsin 2)(A x A x A x A x A x A x k k A N π。 (3) 线性部分的等效变换 非线性系统中的线性部分等效变换采用方框图变换方法,变换过程中,不允许线性环节与非线性环 节交换位置。要点仍然是保持信号关系不变。例子参见图8-42 4 ☆非线性系统的描述函数法分析 使用Nyquist 稳定判据的条件:非线性部分)(A N 和线性部分)(s G 可以分开,分析0)(≡t r 时的稳定性。 非线性系统的特征方程:0)()(1=+s G A N ;Nyquist 稳定判据的特征方程1)()(-=ωj G A N 。 因)()(ωj G A N 曲线很难绘制,应用Nyquist 稳定判据的特征方程等价于 )(/1)(A N j G -=ω; 式中 )(/1A N -—负倒描述函数。应用Nyquist 稳定判据判断非线性稳定性时,以)(/1A N -替代临界点)0,1(-。 ☆非线性系统的稳定性判定规则)0(=P : (1) )(ωj G 曲线不包围)(/1A N -曲线,闭环系统稳定; (2) )(ωj G 曲线包围)(/1A N -曲线,闭环系统不稳定; (3) )(ωj G 曲线与)(/1A N -曲线相交,闭环系统可能出现自振荡;自振荡的频率为)(ωj G 在交点处 的ω值,振幅是)(A N 在交点处的A 值。 {)(ωj G 曲线逆时针包围)(/1A N -曲线的次数P N =,闭环系统稳定;否则不稳定。)(ωj G 曲线 与)(/1A N -曲线相交,闭环系统可能出现自振荡;} 例8-5 非线性系统如图8-45所示,分析系统稳定性。)0(=P 解:) 14)(1(10 )(++= s s s s G ; 1804arctan arctan 90)(-=---=∠x x x j G ωωω;21=x ω; 8)21(-=j G ;A M k A N π4)(+=;45.0)(1+-=-A A A N ππ;0) 0(1=-N ;2)(1-=∞-N ; 负倒描述函数曲线在负实轴的]0,2(-区间上; )(ωj G 曲线包围)(/1A N -曲线,闭环系统不稳定; 例8-6 非线性系统如图8-48所示,试分析:(1) 15=K 时非线性系统稳的运动状况;(2) 欲使系统不 出现自振荡,K 的临界值。 解:)12.0)(11.0(15)(++= s s s s G ; 502 =x ω;13.015)071.7(2 -=-=x j G ω; ????? ? -+=2000)(1arcsin 2)(A x A x A x k A N π,0x A ≥;2)(0==k x N ;0)(=∞N ; 记 10<=A x z ;014)(2>-=u k dz z dN π;)(A N 是单调函数,得知) (1 A N -是单调函数; 负倒描述函数)(/1A N -曲线位于负实轴]5.0,(--∞上,)(ωj G 曲线与)(/1A N -曲线相交,闭环系 统自振荡的稳定性分析; 记交点处非线性环节输入信号为x x A ωsin ,若该信号的幅度x A A <,则)(/1A N -点被包围,系统不稳定,信号幅度增大,直到x A A =;若该信号的幅度x A A >,则)(/1A N -点不被包围,系统稳定,信号幅度减小,直到x A A =;则系统在交点处出现稳定的自振荡。 )() (1x x j G A N ω=- ;1)1(111arcsin 42=??? ???-+x x x A A A π;试探法解得,4752.2=x A ; (1) 15=K 时,在非线性环节输入端存在稳定的自振荡t t e 07.7sin 48.2)(=; (2) 因)(x j G ω的值与K 成正比,要使1|)(|=x j G ω减小到5.0,则5.7155.0=?=x K ,即 在x K K <时,闭环系统稳定,不出现自振荡。 例8-7 非线性系统如图8-50所示,试采用描述函数法分析: (1) 1)(=s G c ;(2) 103.01 25.03.81)(++?= s s s G 时非线性系统稳的运动特性。 解:计算负倒描述函数,2)(14)(A h A M A N -=π,h A ≥;0)(=h N ,0)(=∞N ;计算极值点或 曲线拐点,() 02141114)(22 2122421224221222=-??? ? ??-=?????????????? ??-+???? ??--=- -A h A h A M A h A h A h A M dA A dN ππ; h A m 2=,h M A N m π2)(=;当m A A h <≤时,)(A N 单调增大;当m A A >时,)(A N 单调减小。 本例中 7854.0)(/1-=-m A N ,负倒描述函数)(/1A N -曲线位于负实轴]7854.0,(--∞上; (1) )1125.0)(15.0(10 )(++=s s s s G ;4) 125.05.0(12 /1=?=x ω;1625.010)4(2-=?-=x j G ω; )(ωj G 曲线与)(/1A N -曲线有两个交点,分析得知值大的x A 为自振荡振幅。 1)25 .01(42/12=-A A π;解得,5557.01=A ,1456.12=A ; (2) ) 103.0)(1125.0)(15.0() 125.0(2048.1)(++++=s s s s s s G ;s rad x /7.13=ω;02114.0)7.13(-=j G ; )(ωj G 曲线不包围)(/1A N -曲线,闭环系统稳定。 消除非线性系统自振荡的措施:原则是避免)(ωj G 曲线与)(/1A N -曲线相交。 (1) 减小线性部分的开环增益,使)(ωj G 曲线不与)(/1A N -曲线相交; (2) 增加(超前)校正环节,改变)(ωj G 曲线形状,不与)(/1A N -曲线相交; (3) 改变非线性参数,使)(/1A N -曲线不与)(ωj G 曲线相交。 8-5 非线性控制的逆系统方法(略) 1 非线性系统的反馈线性化 反馈控制方法是实现控制目的的基本途径。采用适当的反馈措施能够使闭环系统成为线性系统: 例 对于非线性系统 u y y f y =+),( ,采用状态反馈 ),(y y f r u +=, 则闭环系统为 r y = 。 2 逆系统方法的基本思想 设原系统为T :y u →,y u T =)(;见图8-52; 若存在满足初始状态的逆系统,则T ?:u y →,u y T =)(?;见图8-53。 为讨论方便取)()()(t y t n =φ; 若有系统l T ?:u →φ,u T l =)(?φ;使得y u T T T l ==}{)}(?{φ;称该系统为原系统的l 阶积分逆系统。 3 伪线性系统 将n 阶积分逆系统与原系统串联构成新的系统,成为伪线性线性系统。将图8-52与图8-83串联。 例 非线性系统为u u y y y y 2222+=+-,求对应的伪线性系统。 解一: 由原系统方程得到,u y y y y u 5.05.02-+-= ; 取伪线性系统的输入为,y =φ;则逆系统方程为,25.05.0y y y u u +-+-= φ; 伪线性系统为,)()(2s s s Y Φ=-。 解二:取伪线性系统的输入为,y y +=5.0φ;则逆系统方程为,2)1(5.0y y y u u ++-+-= φ; 伪线性系统为,)() 15.0(1 )(s s s s Y Φ+= 。 4非线性控制的逆系统设计方法(略) 可采用线性系统的设计方法。 作业: 8.2,8.4(1),8.17,补充题2题 习题答案8 8-1 1)二阶系统,2个状态变量。 设 2121212)(2)()( )()(x x t y t y t y x t y x x t y x --=--==?=== , []? ?? ???==??????--==00 01 2110 B y A A ,,,x x x 2) []x x x 001 100322100010=?? ?? ? ?????+??????????---=y u 3) []x x x 121 100321100010=?? ?? ? ?????+??????????---=y u 提示:本题利用了可控规范型与微分方程系数的关系。 8-2 1) 2 3101 )()(s s s U s Y += []x x x 001 1001000100010=?? ?? ? ?????+??????????-=y u 2) 8 1 5611171181891)()(2 3+?++?-?=++=s s s s s s s U s Y []x x x 001 100980100010=?? ??? ?????+??????????--=y u 或 x x x ?? ????-=???? ? ?????+??????????--=5617 1 8 1 111800010000y u 3) []x x x 145 1006116100010=?? ?? ? ?????+??????????---=y u 提示:本题利用了状态空间的规范型与传递函数系数的关系。 8-3 8 659 122+++s s s 8-4 ?? ? ???-=??????-??????+-+---==??????----------t t t t t t t t t t At t x t x e e 11e 2e e 2e 2e e e e 2)0(e )()(222221x 8-5 ?? ? ???-+-+-=-==------t t t t s BU A sI t 32321 1 3e 4e 1e e 21)]()[(L )()0(x 0x , 8-6 [])(120)( )(100)(321100010)1(k k y k u k k x x x =?? ??? ?????+??????????---=+ 或 [])(100)( )(120)(310201100)1(k k y k u k k x x x =?? ??? ?????+??????????---=+ 或 [])(001)( )(111)(321100010)1(k k y k u k k x x x =?? ?? ? ?????-+??????????---=+ 提示:利用状态空间的规范型与差分方程系数的关系。 8-7 []0110 3210=??? ???=??????--= C B A 下面是对该状态方程的求解过程。设初始条件为零。 ???? ??????++++-+++++=? ? ????+-=---232 32231233321)(2 2221 1z z z z z z z z z z z z A zI ???? ??? ?????-++++--++-+=????????????-++-++=?? ? ?????--=-??????-=-=---)1(6)1(2)2(32)1(6)1(2)2(3)1)(23()1)(23( 10)(110()(22 21 1 1 z z z z z z z z z z z z z z z z z z z z z z A zI z z A)(zI BU(z)A)zI z X ? ?????????+-+--+---==-61)1(21)2(3 261)1(21)2(31)]([Z )(1k k k k z X k x 8-8 1) ???????=??????= 10 0010B A 101])[(L e 1 1? ? ????=-=--t A sI At 5-25 对于典型二阶系统,已知参数3=n ω,7.0=ξ,试确定截止频率c ω和相角裕度γ。 解 依题意,可设系统的开环传递函数为 ) 12 .4(143 .2) 37.02(3)2()(22+=??+=+=s s s s s s s G n n ξωω 绘制开环对数幅频特性曲线) (ωL 如图解5-25所示,得 143.2=c ω ?=+?=63)(180c ω?γ 5-26 对于典型二阶系统,已知σ%=15%,s 3=s t ,试计算相角裕度γ。 解 依题意,可设系统的开环传递函数为 ) 2()(2n n s s s G ξωω+= 依题 ???? ?====--n s o o o o t e σξξπ 5.33152 1 联立求解 ???==257.2517 .0n ωξ 有 )1333 .2(1824 .2) 257.2517.02(257.2)(2 +=??+= s s s s s G 绘制开环对数幅频特性曲线)(ωL 如图解5-26所示,得 1824.2=c ω ?=+?=9.46)(180c ω?γ 5-27 某单位反馈系统,其开环传递函数 G s s s s s ().(.)(.)(.) = +++1670810251006251 试应用尼柯尔斯图线,绘制闭环系统对数幅频特性和相频特性曲线。 解 由G(s)知:20lg16.7=24.5db 交接频率:ω11 08 125= =.. , ω210254==. , ω310062516==. 图解5-27 Bode 图 Nyquist 图 5-28 某控制系统,其结构图如图5-83所示,图中 ) 20 1(8.4)(,81) 1(10)(21s s s G s s s G += ++= 试按以下数据估算系统时域指标σ%和t s 。 (1)γ和ωc (2)M r 和ωc (3)闭环幅频特性曲线形状 解 (1) ) 20 1)(81()1(48)()()(21s s s s s G s G s G +++= = db 6.3348lg 20= 20, 1,125.081321====ωωω 065,6≈=∴ γωc 查图5-56 得 13.16 .6, %21%== =C S t ωσ秒 (2) 根据M r ,ωC 估算性能指标 当 ω=5 时: L(ω)=0, ?(ω)=-111° 9-2 已知非线性系统的微分方程为 (1) 320x x x ++= (2) 0x xx x ++= (3) 0x x x ++= (4) 2(1)0x x x x --+= 试确定系统的奇点及其类型,并概略绘制系统的相轨迹图。 解 (1) 奇点(0, 0)。特征方程为 2320λλ++= 两个特征根为 1,21, 2λ=-- 平衡点(0, 0)为稳定节点。 在奇点附近的概略相轨迹图: x (2) 奇点(0, 0)。在平衡点(0, 0)的邻域内线性化,得到的线性化模型为 0x x += 其特征方程为 210λ+= 两个特征根为 1,2j λ=± 1 平衡点(0, 0)为中心点。 在奇点附近的概略相轨迹图: x (3) 奇点(0, 0)。原方程可改写为 00 00 x x x x x x x x ++=≥?? +-= 2 为 0x x x -+= 其特征方程为 210λλ-+= 两个特征根为 1,20.50.866j λ=± 平衡点(0, 0)为不稳定焦点。 在奇点附近的概略相轨迹图: x 9-6 非线性系统的结构图如图9-51所示,其中0.2a =,0.2b =,4K =, 1T s =。试分别画出输入信号取下列函数时在e -e 平面上系统的相平面 图(设系统原处于静止状态)。 (1) () 2 1()r t t = (2) () 2 1()0.4r t t t =-+ (3) () 2 1()0.8r t t t =-+ (4) () 2 1() 1.2r t t t =-+ 图9-51 题9-6图 解:由系统结构图可得4c c u +=。由于e r c =-,那么4e e u r r ++=+。 自动控制原理课程总结 20091334023张杰 作为一门电子信息类的学生,专业的培养目标就是要求我们能够设计简单的控制电路,加之自己对单片机的兴趣,因此有必要学习自动控制原理这门课程。第一节课老师的一些理念我非常的认同,比如一门课程要把握这门课的整体框架,即这门课多的灵魂所在,毕竟我们学的东西很多,如果不每天使用这些,一段很长的时间以后我们又能够记得多少呢,把握一门课的整体框架很重要;还有就是老师强调的就是要培养自己快速学习的能力,这个世界有很多东西要学,我们所处的IT行业新知识的更新速度更是飞快,以后在工作岗位上的许多知识技能都要从头开始,一个人最大的竞争优势就是能在最短的时间内掌握应有的技能……当时我就暗暗高兴,觉得选修这门课时明智之举。 没有拿到书以前我所认为的子偶那个控制原理就是讲一些自动控制的某些方法,等接触到这门课程才发现这门课程用到了还多的方面的基本知识,深入了解之后才知道这门课程讲的是一些控制原理的一些原理,自动控制原理的思路,一些数学模型,以及线性系统的分析…… 本书的第一章对自动控制原理做了一个概述,正如老师所讲,学一门课程要先了解这门课程的整体结构,反馈的控制就是本书的重点,其基本原理是取被控量的反馈信息,用以不断地修正被控量与输入量之间的误差,从而实现对被控对象进行控制的任务。课程的主要内容包括:自动控制系统的基本组成和结构、自动控制系统的性能指标,自动控制系统的类型(连续、离散、线性、非线性等)及特点、自动控制系统的分析(时域法、频域法等)和设计方法等。这就是本书的整体框架。 第二章刚开始讲的就是《信号与系统》的主要内容,傅里叶变换和拉普拉斯变换的规则和性质,这是自动控制原理的基础与基本的数学工具。在给定的最小RLC无源网络中了解了线性微分方程的建立以及控制系统微分方程的建立以及求解方法。接着是控制系统的复数域数学模型,再次加强了传递函数的概念,我们接下来研究的好多性质都是围绕传递函数进行的,这是一个很重要的概念。在控制系统的结构图和信号的流图这节中我是真正掌握了控制原理图的读图方法,解答了我以前学《信号与系统》与系统时读不懂结构图的困惑,顿时豁然开朗。方框图和信号流图的变换和化简讲了好多的性质,对我们以后读懂结构图打下的基础,其中有许多法则在这里就不列出了,毕竟这不是这篇课程总结的目的。我感觉有个梅森公式很有用,有了这个公式,我们以后在解题时就可以省去好多的不必要浪费的时间,直接套用公式就可以求出传递函数,对解大题时分析思路有很大的帮助。 在确定系统的数学模型之后,我们可以用时域分析法,根轨迹法或频域分析法来分析线性系统的性能,第三章讲的就是线性系统的时域分析法,首先应掌握典型的输入输出信号,以及什么是动态和稳态过程以及它们的性能。重点是线性连续系统的动态过程分析。一阶系统的分析是指一阶微分方程作为运动方程的控制系统,需要掌握的内容是一届系统对典型输入信号的输出响应。二阶系统是指以二阶微分方程作为运动方程的控制系统,以二阶系统的单位阶跃响应为例,分别研究了欠阻尼的单位阶跃响应,临界阻尼,过阻尼二阶系统的单位阶跃响应。 第六章: 例1 图6-1是一采用PD 串联校正的控制系统。 图6-1 PD 串联校正的控制系统 (1)当10,1p d K K ==时,求相位裕量γ。 解:系统的开环传递函数为 ()(1) p d K K K s W s s s += + 当10,1p d K K ==时,有10(10.1) ()(1) K s W s s s +=+。 开环对数幅频特性为 ()20lg1020lg L ωω=+- 0.1ω=时,()20lg1020lg 40L dB ωω=-= 1ω=时,()20lg1020lg 20L dB ωω=-= 剪切频率c ω为 ()20lg1020lg 20lg 0L dB ωωω=--= ,c ω相位裕量γ为 1 18090arctan arctan 35.10.1 c c γωω=?-?+-=? (2)若要求该系统剪切频率5c ω=,相位裕量50γ=?,求,p d K K 的值。 解: 系统的开环传递函数为 (1) ()(1) (1) p d p d p K K K s K K K s W s s s s s ++= = ++ 相位裕量为 18090arctan arctan 50d c c p K K γωω=?-?+-=? 得,/0.16d p K K = 当5c ω=,可以得到(5)20lg 20lg 520lg 50p L K =--=,最后解得 25,4p d K K == 例2 已知单位负反馈系统开环传递函数为 ()(0.051)(0.21) K K W s s s s = ++ 试设计串联校正装置,使系统1 5s v K -≥,超调量不大于25%,调节时间不大于1s 。 解 (1) 由性能指标可知,系统提出的是时域指标,可利用它和频域指标的近似关系,先用频域法校正,然后再进行验算。由 2 %0.160.4(1)0.25%12 1.5(1) 2.5(1)1sin ()p s c p p p c M k t k M M M δπωγω=+-≤?? ?=≤?? ?=+-+-???= ?? 得系统要求的各项指标为 ?? ? ??=== 7.54)(74.7225.1c c p M ωγω (2)由5v K ≥,可以计算出放大系数5K =。其传递函数为 55 ()(0.051)(0.21)(1)(1) 205 W s s s s s s s = = ++++ 其对数幅频特性如图6-14所示。 系统未校正时,按下式可计算出其穿越频率,c ω如认为 1,20c ω>>得 5 ()15 c c c A ωωω≈ =? 故得5c ω≈ 其相位裕度为 9 控制系统的非线性问题 9.1概述 在物理世界中,理想的线性系统并不存在。严格来讲,所有的控制系统都是非线性系统。例如,由电子线路组成的放大元件,会在输出信号超过一定值后出现饱和现象。当由电动机作为执行元件时,由于摩擦力矩和负载力矩的存在,只有在电枢电压达到一定值的时候,电动机才会转动,存在死区。实际上,所有的物理元件都具有非线性特性。如果一个控制系统包含一个或一个以上具有非线性特性的元件,则称这种系统为非线性系统,非线性系统的特性不能由微分方程来描述。 图9-1所示的伺服电机控制特性就是一种非线性特性,图中横坐标u 为电机的控制电压,纵坐标ω为电机的输出转速,如果伺服电动机工作在A 1OA 2区段,则伺服电机的控制电压与输出转速的关系近似为线性,因此可以把伺服电动机作为线性元件来处理。但如果电动机的工作区间在B 1OB 2区段.那么就不能把伺服电动机再作为线性元件来处理,因为其静特性具有明显的非线性。 图9-1 伺服电动机特性 9.1.1控制系统中的典型非线性特性的类型 常见典型非线性特性有饱和非线性、间隙非线性、死区非线性、继电非线性等。 9.1.1.1饱和非线性 控制系统中的放大环节及执行机构受到电源电压和功率的限制,都具有饱和特性。如图9-2所示,其中a x a <<-的区域是线性范围,线性范围以外的区域是饱和区。许多元件的运动范围由于受到能源、功率等条件的限制,也都有饱和非线性特性。有时,工程上还人为引入饱和非线性特性以限制过载。 图9-2 饱和非线性 9.1.1.2不灵敏区(死区)非线性 控制系统中的测量元件、执行元件等一般都具有死区特性。例如一些测量元件对微弱的输入量不敏感,电动机只有在输入信号增大到一定程度的时候才会转动等等。如图9-3所示,其特性是输入信号在?< 审定成绩: 自动控制原理课程设计报告 题目:单位负反馈系统设计校正 学生姓名姚海军班级0902 院别物理与电子学院专业电子科学与技术学号14092500070 指导老师杜健嵘 设计时间2011-12-10 目录一设计任务 二设计要求 三设计原理 四设计方法步骤及设计校正构图五课程设计总结 六参考文献 一、 设计任务 设单位负反馈系统的开环传递函数为 ) 12.0)(11.0()(0 ++= s s s K s G 用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能: (1) 相角裕度0 45 ≥γ ; (2) 在单位斜坡输入下的稳态误差05.0<ss e ; (3) 系统的剪切频率s /rad 3<c ω。 二、设计要求 (1) 分析设计要求,说明校正的设计思路(超前校正,滞后校正或滞后-超前 校正); (2) 详细设计(包括的图形有:校正结构图,校正前系统的Bode 图,校正装 置的Bode 图,校正后系统的Bode 图); (3) 用MATLAB 编程代码及运行结果(包括图形、运算结果); (4) 校正前后系统的单位阶跃响应图。 三、设计原理 校正方式的选择。按照校正装置在系统中的链接方式,控制系统校正方式分为串联校正、反馈校正、前馈校正和复合校正4种。串联校正是最常用的一种校正方式,这种方式经济,且设计简单,易于实现,在实际应用中多采用这种校正方式。串联校正方式是校正器与受控对象进行串联连接的。本设计按照要求将采用串联校正方式进行校。校正方法的选择。根据控制系统的性能指标表达方式可以进行校正方法的确定。本设计要求以频域指标的形式给出,因此采用基于Bode 图的频域法进行校正。 几种串联校正简述。串联校正可分为串联超前校正、串联滞后校正和滞后-超前校正等。 超前校正的目的是改善系统的动态性能,实现在系统静态性能不受损的前提下,提高系统的动态性能。通过加入超前校正环节,利用其相位超前特性来增大系统的相位裕度,改变系统的开环频率特性。一般使校正环节的最大相位超前角出现在系统新的穿越频率点。 参考答案 一、填空题 1. 非本质;本质 2. 自持振荡 3. 初始条件;输入信号大小 4. 饱和非线性;死区非线性;间隙非线性;继电器非线性 5. 不稳定 6. 稳定;不稳定;半稳定 7. 自左向右;自右向左 二、分析与计算题 1. 求3()()y t ax t =的描述函数。 解:由于3()()y t ax t =是单值奇函数,所以其傅里叶级数展开式中A 0=0、A 1=0、φ1=0,将()sin x t A t ω=代入B 1的计算公式,可得 2102330340 3203203 03031()sin 1sin sin 2sin 21cos 2()2 212cos 2cos 24 1cos 412cos 22242311(cos 2cos 4)828 231 (sin 284 B y t td t aA t td t aA td t aA t d t aA t t d t t t aA d t aA t t d t aA π π π ππππωωπωωωπωωπωωπωωωπωωωπωωωπππ===-=-+=+-+==-+=-???????3 1sin 4) 003234 t t aA ππωω+= 所以 32 133()44 B aA N A aA A A === 2.设具有滞环继电器非线性特性的非线性系统结构如题图8.1所示,已知b =1,a =0.3,试判断系统是否存在自持振荡,若存在,则求出自持振荡的幅值和频率。 题图8.1 解:具有滞环的继电器非线性特性的描述函数为 2 4()j ()ab N A A a A π=≥ 其描述函数负倒数特性为 1j ()()4a A a N A b π-=≥ 可见,描述函数负倒数特性的虚部为常数4a b π-,即1()N A -曲线为一条虚部为4a b π-的直线。 由于10 ()(21)(0.41) G s s s =++,所以 HEFEI UNIVERSITY 自动控制原理课程总结 系别电子信息与电气工程系 专业自动化 班级 09自动化(1)班 姓名 完成时间 2011.12.29 自动控制原理课程总结 前言 自动控制技术已广泛应用于制造、农业、交通、航空及航天等众多产业部门,极大地提高了社会劳动生产率,改善了人们的劳动环境,丰富了人民的生活水平。在今天的社会中,自动化装置无所不在,为人类文明进步做出了重要贡献。本学期我们开了自动控制原理这门专业课,下面主要介绍下我对这门课前五章的认识和总结。 一、控制系统的数学模型 1.传递函数的定义: 在线性定常系统中,当初是条件为零时,系统输出的拉氏变换与输入的拉氏变换之比。 (1)零极点表达式: (2)时间常数表达式: 2.信号流图 (1)信号流图的组成 节点:用来表示变量或信号的点,用符号“○”表示。 支路:连接两节点的定向线段,用符号“→”表示。(2)信号流图与结构图的关系 3.梅逊公式 其中:Δ=1-La+LbLc-LdLeLf+...成为特征试。 Pi:从输入端到输出端第k条前向通路的总传递函数 Δi:在Δ中,将与第i条前向通路相接触的回路所在项除去后所余下的部分,称为余子式。 La:所有单回路的“回路传递函数”之和 LbLc:两两不接触回路,其“回路传递函数”乘积之和 LdLeL:所有三个互不接触回路,其“回路传递函数”乘积之和“回路传递函数”指反馈回路的前向通路和反馈通路的传递函数只积并且包含表示反馈极性的正负号。 二、线性系统的时域分 1.ζ、ωn坐标轴上表示如下: (1)闭环主导 极点: 当一个极点距离虚轴较近,且周围没有其他闭环极点和零点,并且该极点的实部的绝对值应比其他极点的实部绝对值小5倍以上。(2)对于任何线性定常连续控制系统由如下的关系: ①系统的输入信号导数的响应等于系统对该输入信号响应的导数; ②系统对输入信号积分的响应等于系统对该输入信号响应的积分,积分常数由初始条件确定。 2.劳斯判据: 设系统特征方程为 : 劳斯判据指出:系统稳定的充要条件是劳斯表中第一列系数都大于零,否则系统不稳定,而且第一列系数符号改变的次数就是系统特征方程中正实部根的个数。 劳斯判据特殊情况的处理 ⑴某行第一列元素为零而该行元素不全为零时——用一个很小的正数ε代替第一列的零元素参与计算,表格计算完成后再令ε→0。 ⑵某行元素全部为零时—利用上一行元素构成辅助方程,对辅助方程求导得到新的方程,用新方程的系数代替该行的零元素继续计算。 3.稳态误差 (1)定义: (2)各种误差系数的定义公式 神经网络实现非线性系统设计 毕业设计(论文) 中文题目神经网络实现非线性系统设计英文题目 Neural Network Nonlinear System 院系: 年级专业: 姓名: 学号: 指导教师: 职称: 月日 【摘要】神经网络具有极强的非线性及自适应自学习的特性,常被用来模拟判断、拟合和控制等智能行为,成功渗透了几乎所有的工程应用领域,是一个在人工智能方向迅速发展的具有重大研究意义的前沿课题。 本文前两章主要介绍了神经网络的发展背景和研究现状,还有BP 网络的结构原理及相关功能。然后,对如何利用GUI工具和神经网络原理设计非线性系统的基本流程进行了详细的阐述。最后,经过利用Matlab软件进行编程,以及是经过对BP神经网络算法及函数的运用,研究其在函数逼近和数据拟合方面的应用,并分析了相关参数对运行结果的影响。 【关键词】BP网络,GUI,非线性系统 【ABSTRACT】Neural network has a strong nonlinear and adaptive self-organizing properties, often used to simulate the behavior of intelligent decision-making, cognitive control, and the successful penetration of almost all engineering applications, is a rapid development in the direction of artificial intelligence 自动控制原理第六章课后习题答案(免费) 线性定常系统的综合 6-1 已知系统状态方程为: ()100102301010100x x u y x ? -???? ? ?=--+ ? ? ? ?????= 试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3. 解: 由()100102301010100x x u y x ? -???? ? ?=--+ ? ? ? ?????=可得: (1) 加入状态反馈阵()0 12K k k k =,闭环系统特征多项式为: 32002012()det[()](2)(1)(2322)f I A bK k k k k k k λλλλλ=--=++++-+--+- (2) 根据给定的极点值,得期望特征多项式: *32()(1)(2)(3)6116f λλλλλλλ=+++=+++ (3) 比较()f λ与*()f λ各对应项系数,可得:0124,0,8;k k k === 即:()408K = 6-2 有系统: ()2100111,0x x u y x ? -????=+ ? ?-????= (1) 画出模拟结构图。 (2) 若动态性能不能满足要求,可否任意配置极点? (3) 若指定极点为-3,-3,求状态反馈阵。 解(1) 模拟结构图如下: (2) 判断系统的能控性; 0111c U ?? =?? -?? 满秩,系统完全能控,可以任意配置极点。 (3)加入状态反馈阵01(,)K k k =,闭环系统特征多项式为: ()2101()det[()](3)22f I A bK k k k λλλλ=--=+++++ 根据给定的极点值,得期望特征多项式: *2()(3)(3)69f λλλλλ=++=++ 比较()f λ与*()f λ各对应项系数,可解得:011,3k k == 即:[1,3]K = 物理电子工程学院《自动控制原理》课程教学大纲课程编号:04210164 课程性质:专业必修课 先修课程:高等数学、函数变换、模拟电路、电路分析 总学时数:76 学分:4 适合专业:电子信息工程、机械与电子工程、机械自动化、电器自动化、通信、包装工程等专业 (一) 课程教学目标 自动控制理论是电子信息科学与技术专业的一门重要的专业基础课程。它侧重于理论角度,系统地阐述了自动控制科学和技术领域的基本概念和基本规律,介绍了自动控制技术从建模分析到应用设计的各种思想和方法,内容十分丰富。通过自动控制理论的教学,应使学生全面系统地掌握自动控制技术领域的基本概念、基本规律和基本分析与设计方法,以便将来胜任实际工作,具有从事相关工程和技术工作的基本素质,同时具有一定的分析和解决有关自动控制实际问题的能力。 (二) 课程的目的与任务 本课程是电子通信工程、机电一体化、包装工程等专业、工科及相关理科的必修基础课程。通过本课程的学习,使学生掌握自动控制的基础理论,并具有对简单连续系统进行定性分析、定量估算和初步设计的能力,为专业课学习和参加控制工程实践打下必要的基础。学生将掌握自动控制系统分析与设计等方面的基本方法,如控制系统的时域分析法、根轨迹分析法、频域分析法、状态空间分析法、采样控制系统的分析等基本方法等。为各类计算机控制系统设计打好基础。 (三) 理论教学的基本要求 1、熟练掌握自动控制的概念、基本控制方式及特点、对控制系统性能的基本要求。 2、熟练掌握典型环节的传递函数、结构图化简或梅森公式以及控制系统传递函数的建立和表示方法,初步掌握小偏差线性化方法和通过机理分析建立数学模型的方法。 习题8 8—1 三个非线性系统的非线性环节一样,线性部分分别为 ①G㈤一赢;②G㈤一志;③G㈤一高等揣。 试问用描述函数法分析时,哪个系统分析的准确度高? 8 2试求图8~41所示非线性特性的描述函数 8—3 试求图8—42所示非线性特性的描述函数。8—4求图8 43所示非线性描述函数。 8—5求图8 44所示非线性描述函数。 8 非线性系统理论§265 8—6 求出图8—45所示非线性控制系统线性部分的传递函数。 8—7一非线性系统其前向通路中有一描述函数N(A)一去e j寻的非线性元件,线性部分传递函数为试用描述函数法确定系统是否存在自激振荡,若有,求出自激振荡参数。 8 8试用描述函数分析图8 46所示系统必然存在自激振荡, y.z,e的稳态波形。 8 9若非线性系统的微分方程为 试求系统的奇点.并概略绘制奇点附近的相轨迹。并求出自激振荡振幅和振荡频率,并画出 8 10 非线性系统结构如图8—47所示,系统开始是静止的,输入信号r(£)一4×1(f),试写出切换线方程,确定奇点的位置和类型,作出该系统的相平面图,并分析系统的运动特点。 8—11 已知非线性系统的微分方程为 图8 47题8—10非线性系统 i1一T1(T;+z;一1)(T;+上;~9)一z2(z;+T;一4) j 2一z2(z;+卫!一1)(工}+z;~9)+z1(zi+T;一4) 试分析系统奇点的类型,判断系统是否存在极限环。 8 12绘制图8 48所示非线性系统的相轨迹,分析系统的运动特性(B>O,B。<4K)。 8—13 已知非线性系统如图8—49所示,粗略绘制系统在单位阶跃及斜坡输入r一、,T+R 作用下系统的相轨迹,并分析系统的运动特性(T>O,4KT>1)。 8—14一非线性控制系统如图8—50所示,请绘制系统在如下情况下的相轨迹,并分析系统的运动特性。 初始状态为P(O):3.5,i(O)一O。 8—15一位置继电控制系统结构如图8—51所示.当输入幅度为4的阶跃函数,绘制从y(0)一一3,j(O)一O出发的相轨迹,求系统运动的最大速度、超调量及峰值时间。 目录 1 实验背景 (2) 2 实验介绍 (3) 3 微分方程和传递函数 (6) 1 实验背景 在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用。自动控制原理是相对于人工控制概念而言的,自动控制是指在没有人直接参与的情况下,利用外加的设备或装置(称控制装置或控制器),使机器,设备或生产过程(统称被控对象)的某个工作状态或参数(即被控制量)自动地按照预定的规律运行。 在自动控制原理【1】中提出,20世纪50年代末60年代初,由于空间技术发展的需要,对自动控制的精密性和经济指标,提出了极其严格的要求;同时,由于数字计算机,特别是微型机的迅速发展,为控制理论的发展提供了有力的工具。在他们的推动下,控制理论有了重大发展,如庞特里亚金的极大值原理,贝尔曼的动态规划理论。卡尔曼的能控性能观测性和最优滤波理论等,这些都标志着控制理论已从经典控制理论发展到现代控制理论的阶段。现代控制理论的特点。是采用状态空间法(时域方法),研究“多输入-多输出”控制系统、时变和非线性控制系统的分析和设计。现在,随着技术革命和大规模复杂系统的发展,已促使控制理论开始向第三个发展阶段即第三代控制理论——大系统理论和智能控制理论发展。 在其他文献中也有所述及(如下): 至今自动控制已经经历了五代的发展: 第一代过程控制体系是150年前基于5-13psi的气动信号标准(气动控制系统PCS,Pneumatic Control System)。简单的就地操作模式,控制理论初步形成,尚未有控制室的概念。 第二代过程控制体系(模拟式或ACS,Analog Control System)是基于0-10mA或4-20mA 的电流模拟信号,这一明显的进步,在整整25年内牢牢地统治了整个自动控制领域。它标志了电气自动控制时代的到来。控制理论有了重大发展,三大控制论的确立奠定了现代控制的基础;控制室的设立,控制功能分离的模式一直沿用至今。 第三代过程控制体系(CCS,Computer Control System).70年代开始了数字计算机的应用,产生了巨大的技术优势,人们在测量,模拟和逻辑控制领域率先使用,从而产生了第三代过程控制体系(CCS,Computer Control System)。这个被称为第三代过程控制体系是自动控制领域的一次革命,它充分发挥了计算机的特长,于是人们普遍认为计算机能做好一切事情,自然而然地产生了被称为“集中控制”的中央控制计算机系统,需要指出的是系统的信号传输系统依然是大部分沿用4-20mA的模拟信号,但是时隔不久人们发现,随着控制的集中和可靠性方面的问题,失控的危险也集中了,稍有不慎就会使整个系统瘫痪。所以它很快被发展成分布式控制系统(DCS)。 第四代过程控制体系(DCS,Distributed Control System分布式控制系统):随着半导体制造技术的飞速发展,微处理器的普遍使用,计算机技术可靠性的大幅度增加,目前普遍使用的是第四代过程控制体系(DCS,或分布式数字控制系统),它主要特点是整个控制系统不再是仅仅具有一台计算机,而是由几台计算机和一些智能仪表和智能部件构成一个了控制 第9章 平稳随机信号作用下线性系统的分析 1.设随机过程 ,其中 a 和ω是常数,是服 从[0,2π]上均匀分布的随机变量,求 的数字特征。 解: 由于的概率密度函数为随机过程 的均值函数、相关函数、协方差函数、方差函数和 均方值函数可分别求得如下:2.设{X n ,n=1,2,…}是互不相关的随机变量序列,且 , k=1,2,…,试讨论{X n ,n=1,2,…}的平稳性。 所以,{X n,n=1,2,…}具有平稳性,称{X n,n=1,2,…}为平稳随机序列。 3.设s(t)是周期为T的可积函数,令-∞<t<+∞,其中,称{X(t),-∞<t<+∞}为随机相位周期过程,试讨论它的平稳性。 解:由故的概率密度函数为 于是 所以随机相位周期过程{X(t),-∞<t<+∞}是平稳过程。 4.设{X n,n=1,2,…}是随机变量序列, 是两两不相等的实数序列,试研究的平稳性。 所以{Y(t),-∞<t<+∞}具有平稳性。 5.设{X(t),t≥0}是只取±1两个值的过程,其符号的改变次数是一参数为λ的Poisson过程{N(t),t≥0},且,试讨论{X(t),t≥0}的平稳性。 解: 所以{X(t),t≥0}是平稳过程。 6.设系统的输入为实平稳过程{X(t),t≥0},其均值函数m X=0,相关函数为 为输出,且输入与输出满足线性微分方程 试求输出{Y(t),t≥0}的均值函数与相关函数。 解:由于该系统是线性定常系统,由得 m Y(t)=0,t≥0 如取有 因此频率响应为 又{X(t),-∞<t<+∞}的相关函数,故其谱密度为 由知识点10知,{Y(t),t≥0}的谱密度为 于是 7.设X(t)=sinUt,t=1,2,…,其中U服从区间[0,2π]上的均匀分布,试讨论{X(t),t=1,2,…}的平稳性。 第八章习题参考答案 8-3 设系统如图8-30所示,其中继电器非线性特性的a =1。试用描述函数法分析系统是否会出现自持振荡?如存在,试求出系统自持振荡的振幅和频率的近似值。 解:死区继电特性的描述函数为: 2 )( 14= )(A a A πM A N - (A ≥a ) 将M =1,a =1代入上式得: 2 2 )1( 14= )( 14= )(A A πA a A πM A N -- 当A 其频率特性为:) 2+)(1+(10 = )(j ωj ωωj ωj G 幅频特性和相频特性分别为: ) 4+)(1+(10 = |)(2 2 ωωωωj G |, ω.a r c t a n ωa r c t a n ωφ5090=)(--- 令 180=)(-ωφ,即 180=5090=)(----ω.arctan ωarctan ωφ 90 =50+ω.arctan ωarctan → 90 =.501.512 ω ωarctan - 解得2=ω,此时7 .61≈35=18 210 = ) 4+)(1+(10 = |)2(2 2ωωωj G | 因此,当2=ω时,线性部分奈氏曲线ΓG 与负实轴的交点坐标为(-1.67,j 0)。 ΓG 曲线如下图所示。由图可见,ΓG 曲线和-1/N (A )曲线存在两个交点。 由1 4 =)(1)2+)(1+(10= )(2 2-- =-A A πANj ωj ωωj ωj G 解得两组解:2 =1ω,2.21=1A 和2 = 2ω,37.1=2A 根据周期运动稳定性判据,A 1和ω1对应不稳定的周期运动;A 2和ω2对应稳定的周期运动。 当初始条件或外扰动使A A 1,则系统运动存在自振荡: t sin .)t (e 2731= () jY ω() X ωω=∞ ω=7.61-7.15- ) (1 A N - 第九章非线性控制系统简介 1 主要内容简介 Description Function(描述函数)Lyapunov(李亚普诺夫)稳定性分析 2 简介简介回顾非线性系统特点 研究非线性系统的意义与方法典型非线性特性的数学描述 3 简介 1. 回顾 到目前为止前面的分析与设计都是基于线性系统的. 许多实际系统在某个操作点附近都可以近似为线性系统. 但是 非线性特性问题仍然不容忽视,本章就非线性控制进行简要介绍. 4 简介 x1 t y1 t x 2 t y 2 t 2. 非线性系统特点 a1 x1 t a 2 x 2 t a1 y1 t a 2 y 2 t 非线性系统与线性控制系统相比,具有一系列新的特点 1 线性系统满足叠加原理,而非线性控制系统不满足叠加原理(指同时满足叠加性与均匀性 虽然非线性系统通过利用非线性滤波,可使系统满足叠加性(如图示),但不可能满足均匀性。滤波器 I 非线性器件 I X1X2 Y1+Y2 滤波器 II 非线性器件 II 带滤波器的非线性系统 5 简介 2. 非线性系统特点非线性系统与线性系统相比,具有一系列新的特点:2 非线性系统的稳定性不仅取决于系统的固有结构和参数,而且与系统的初始条件以及外加输入有关系 对非线性系统而言,稳定性总是针对某一平衡点(状态)讨论的。 所谓平衡点(状态): xt f x t 设 f x t 0 求出满足的所有xe 即为非线性系统的平衡点 6 简介 2. 非线性系统特点例:对于一由非线性微分方程 x x 1 x 描述的非线性系统,显然有两个平衡点,即x10 和 x21。将上式改写为 dx 设t=0时,系统的初态为x0。积分上式可得 dt x 1 x x0 e t xt 1 x 0 x 0 e t xt 若初始条件x0<1,随着时间 1 t t xt0,即平衡状态x10 x0 ln 是小范围稳定的 当x0>1时, x0 1 0 在tlnx0/x0-1时, xt 这说明x21是不稳定的平衡状态。 一阶非线性系统 7 简介自激振荡(自振):没有外界周期变化信号 的作用时,系统内产生的具有固定振幅和频 2. 非线性系统特点 率的稳定周期运动。非线性系统与线性系统相比,具有一系列新的特点: 3 非线性系统可能存在自激振荡现象(即维持等幅振荡运动) 对于二阶非线性系统,这种自激振荡状态称为极限环。 4 非线性系统在正弦信号作用下,其输出存在极其复杂的情况: 跳跃谐振和多值响应 A 2 2 3 1 . 4 4 .5 跳跃谐振与多值响应 8 简介 2. 非线性系统特点分频振荡和倍频振荡 非线性系统在正弦信号作用下,其稳态分量除产生同频率振 荡外,还可能产生倍频振荡和分频振荡。如图所示波形。输入信号 t倍频信号 t分频信号 t 倍频振荡与分频振荡 9 简介 3. 研究非线性系统的意义与方法研究非线性系统的意义1)实际的控制系统,存在着大量的非线性因素。这些非线性因素的 存在,使得我们用线性系统理论进行分析时所得出的结论,与实际 系统的控制效果不一致。线性系统理论无法解释非线性因素所产生 的影响。2)非线性特性的存在,并非总是对系统产生不良影响。 10 简介 3. 研究非线性系统的意义与方法研究非线性系统的方法 1)相平面法是用图解的方法分析一阶,二阶非线性系统的方法。通过绘制控制系统相轨迹,达到分析非线性系统特性的方法。 2)描述函数法是受线性系统频率分析法启发,而发展出的一种分析非线性系统的方法。它是一种谐波线性化的分析方法,是频率法在非线性系统分析中的推广。3)计算机求解法是利用计算机运算能力和高速度求解非线性微分方程的一种数值解法。 11 简介 3. 研究非线性系统的意义与方法常见的非线性特性:继电特性 网络控制系统与传统控制系统区别 摘要:本文对网络控制系统与传统控制系统发展过程,功能特点,主要方法和当前研究热点进行了简要概述。 关键词:网络控制系统传统控制系统区别 1.前言 随着计算机技术和网络技术的不断发展,控制系统正在向智能化、数字化和网络化的方向发展。本文简要回顾了控制网络的发展, 阐述了它与信息网络发展过程的相似性,分析了目前流行的现场总线控制系统的组成及其存在的问题。对于工业以太网做了简单介绍,提出了控制网络结构发展的趋势。 2.计算机控制系统的发展 计算机及网络技术与控制系统的发展有着紧密的联系。最早在50年代中后期,计算机就已经被应用到控制系统中。60年代初,出现了由计算机完全替代模拟控制的控制系统,被称为直接数字控制(Direct Digital Control, DDC )。70年代中期,随着微处理器的出现,计算机控制系统进入一个新的快速发展的时期,1975年世界上第一套以微处理为基础的分散式计算机控制系统问世,它以多台微处理器共同分散控制,并通过数据通信网络实现集中管理,被称为集散控制系统(Distributed Control System, DCS)。 进入80年代以后,人们利用微处理器和一些外围电路构成了数字式仪表以取代模拟仪表,这种DDC的控制方式提高了系统的控制精度和控制的灵活性,而且在多回路的巡回采样及控制中具有传统模拟仪表无法比拟的性能价格比。 80年代中后期,随着工业系统的日益复杂,控制回路的进一步增多,单一的DDC控制系统已经不能满足现场的生产控制要求和生产工作的管理要求,同时中小型计算机和微机的性能价格比有了很大提高。于是,由中小型计算机和微机共同作用的分层控制系统得到大量应用。 进入90年代以后,由于计算机网络技术的迅猛发展,使得DCS系统得到进一步发展,提高了系统的可靠性和可维护性,在今天的工业控制领域DCS仍然占据着主导地位,但是DCS不具备开放性,布线复杂,费用较高,不同厂家产品的集成存在很大困难。 从八十年代后期开始,由于大规模集成电路的发展,许多传感器、执行机构、驱动装置等现场设备智能化,人们便开始寻求用一根通信电缆将具有统一的通信协议通信接口的自动控制原理(梅晓榕)习题答案第八章汇编
自动控制原理第六章
重庆大学自动控制原理2第9章 习题参考答案_作业
自动控制原理课程总结
自动控制原理习题第六章
自动控制原理-第9章 控制系统的非线性问题
自动控制原理课程设计
第8章 非线性系统分析 参考答案汇总
自动控制原理课程总结1
神经网络实现非线性系统设计范本
自动控制原理第六章课后习题答案
自动控制原理课程教学大纲
自动控制原理第8章习题解——邵世凡
重庆大学 自动控制原理课程设计
夏德钤《自动控制原理》(第4版)章节题库-第9章 平稳随机信号作用下线性系统的分析【圣才出品】
自控原理习题参考答案(8)
自动控制原理第九章 大学课件
网络控制系统与传统控制系统区别
相关主题
文本预览