
《计算机网络基础》实验报告(H3CNE《路交换技术》第1卷上册)
实验1 网络设备基本操作
学院
班级
实验组
实验组成员
指导老师
成绩
实验日期
实验1 网络设备的基本操作
1.1 实验内容与目标
完成本实验,您应该能够达到以下目标:
●使用Console口登录设备
●使用Telnet终端登录设备
●掌握基本系统操作命令的使用
●掌握基本文件操作命令的使用
●使用FTP、TFTP上传下载文件
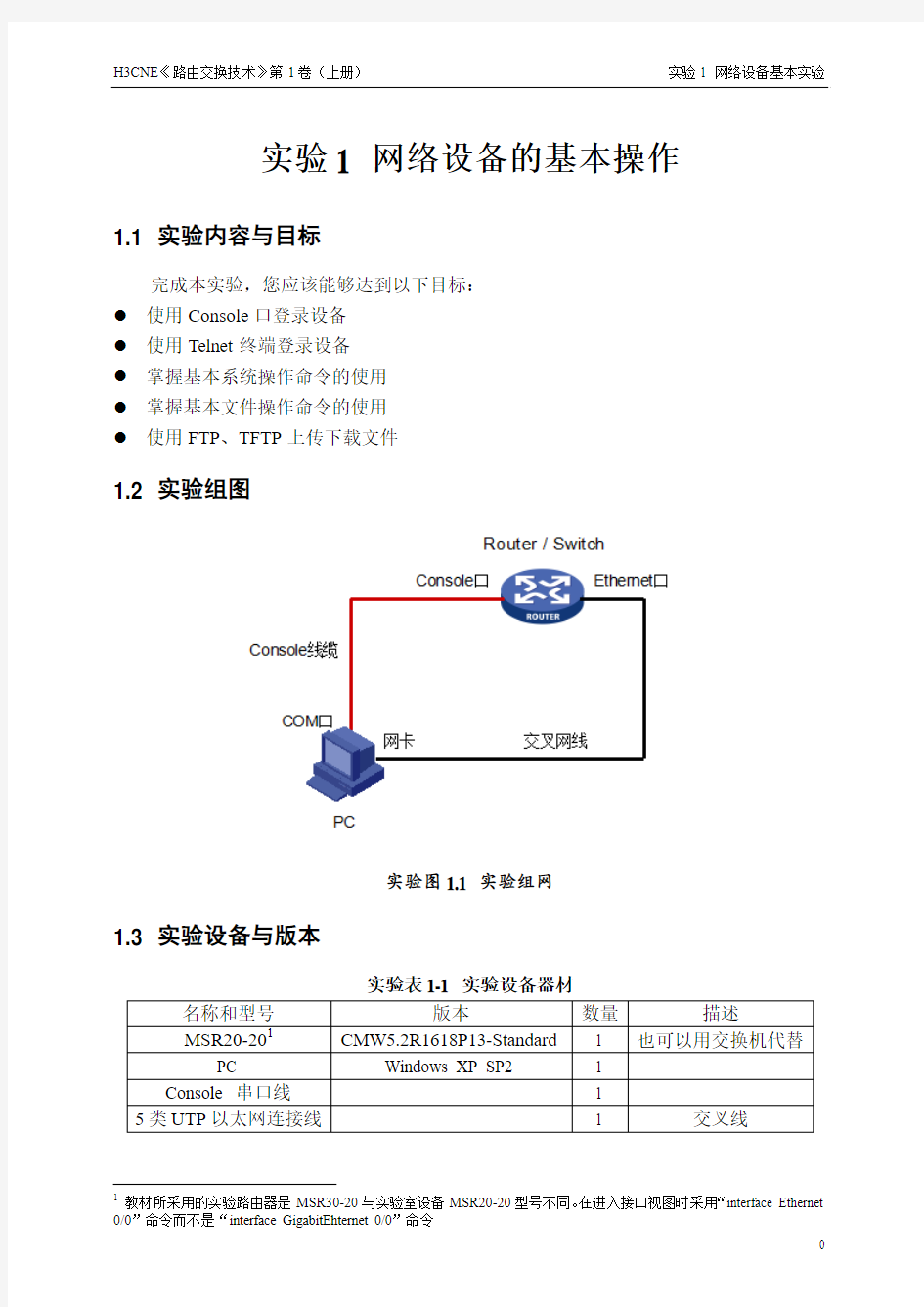
1.2 实验组图
实验图1.1 实验组网
1.3 实验设备与版本
实验表1-1 实验设备器材
1教材所采用的实验路由器是MSR30-20与实验室设备MSR20-20型号不同。在进入接口视图时采用“interface Ethernet 0/0”命令而不是“interface GigabitEhternet 0/0”命令
1.4实验过程
本实验以一台MSR20-20路由器作为演示设备,使用交换机(Quieway3026)亦可。实验任务一:通过Console登录
本实验的主要任务是熟悉并掌握通过Console电缆连接进行设备配置的方法。
步骤一:连接配置电缆
将PC的串口通过标准Console电缆与路由器的Console口连接。电缆的RJ-45 头一端连接路由器的Console口;9针RS-232接口一端连接计算机的串行口。
步骤二:启动PC,运行超级终端
在PC桌面上运行“开始”|“程序”|“附件”|“通信”|“超级终端”命令,填入一个任意名称,单击“确定”按钮。
实验图1.2 超级终端
从“连接时使用”下拉列表框选择合适的COM口,并点击“确定”。如图所示:
实验图1.3 超级终端通信端口
本实验中PC连接Console线缆的接口是,所以从“连接时使用”下拉表框选择合适的COM口,并单击“确定”按钮。
这时弹出COM属性页面,点击“还原为默认值”按钮,正确设置相关的参数,点击“确定”按钮。在下面空格处填写选择的参数。
每秒位数:9600
数据位:8
奇偶校验:无
停止位: 1
数据流控制:无
步骤三:进入Console配置界面
再键入Enter键,进入用户视图。根据显示信息回答如下问题。
用户视图提示符为<系统名> 。
实验任务二:使用系统操作及文件操作的基本命令
步骤一:进入系统视图
完成实验任务一时,配置界面处于用户视图下,此时执行system-view 命令进入系统视图。系统视图提示符为[系统名] 形式。
在系统视图下,执行quit 命令可以从系统视图切换到用户视图。
步骤二:学习使用帮助特性和补全键
H3C Comware平台支持对命令行的输入帮助和智能补全功能。
输入帮助特性:在输入命令时,如果忘记某一个命令的名称,可以在配置视图下仅输入该命令的前几个字符,然后键入,系统则会自动列车以刚才输入的前几个字符开头的所有命令。当输入完一个命令时,也可以用来查看紧随该命令的下一个命令参数。
智能补全功能:在输入命令时,不需要输入一条命令的全部字符,仅输入前几个字符,再键入Tab键,系统会自动补全该命令。如果有多个命令都具有相同的前缀字符的时候,连续键入Tab,系统会在这几个命令之间切换。
1.在系统视图下,使用帮助特性列出以s开头的命令,并记录所看到的前3个命令。
save-power Specify save-power configuration
schedule Schedule system task
screen-length Specify the lines displayed on one screen
2.在系统视图下,使用帮助特性列出system命令后可以输入的关键字和参数,并记下以下观察结果。
[RT1]interface g0/0/0 [RT1-GigabitEthernet0/0/0]
3.练习智能补全功能。在输入命令时,不需要输入一条命令的全部字符,仅输入前几个字符,再按TAB 键,系统会自动补全该命令。如果有多个命令都具有相同的前缀字符的时候,连续按TAB 键,系统会在这几个命令之间切换。
在系统视图下,先输入in,然后多次使用补全功能,记下观察结果。
[RT1]interface
[RT1]info-center
步骤三:更改系统名称
MSR路由器默认的系统名称是RT 。使用适当的命令把系统名称改为YourName,应在系统视图下使用完整命令sysname yourname 比如sysname XJH 。
步骤四:更改系统时间
1. 执行合适的命令查看当前系统时间(用户视图和系统视图均可)。在下面的空格中写出完整的命令和观察到的结果。
[XJH]display clock
09:33:10 UTC Mon 05/30/2016
2. 进入用户视图,将系统时间修改为当前时间(如2015年4月22日14:30:30)。应使用的完整命令为
再次查看当前系统系统时间,验证修改结果。
3. 熟悉系统自动识别功能。在输入命令行时,为方便操作,有时仅输入前面几个字符即可,当然前提是这几个字符可以唯一表示一条命令。进入用户视图,然后执行下列操作。
输入命令d clock,结果是[XJH]d clock
14:41:46 UTC Sun 01/04/2015
输入命令dis clock,结果是[XJH]dis clock
14:42:07 UTC Sun 01/04/2015
输入命令dis clo,结果是[XJH]dis clo
14:42:24 UTC Sun 01/04/2015
步骤五:显示系统运行配置
使用display current-configuration 或者dis
cur 命令显示系统当前运行的配置,由于使用的设备及模块不同,操作时显示的具
体内容也会有所不同。
在一屏显示的最后一行显示出提示信息“----More----”时,表示还有更多信息。
此时按空格键可以继续翻页显示,按回车键可以继续翻行显示,按Ctrl+C 键可以结束显示。继续显示所有信息。
注意查找刚刚使用过的配置系统名称的命令,是否出现在配置中。是
查阅接口信息,并与设备的实际接口和模块进行比对,设备上的实际接口数目和类型与当前设备的型号和所插板卡有关。从当前配置中,可以看出该路由器拥有 3 个物理接口,记录这些接口的名称。
interface GigabitEthernet0/0/1
interface GigabitEthernet0/0/2
interface GigabitEthernet0/0/3
剩下其他配置为该设备的出厂默认配置。
步骤六:显示保存的配置
使用display saved-configuration 命令显示当前系统的保存配置。输出信息的含义为可以在管理/维护设备时使用该命令确认重要的配置是否已经保存到下次启动配置文件。
当前运行的配置相比,输出信息的不同在于。原因是。
步骤七:保存配置
使用save 命令保存配置,选择“Y”,确定将当前运行配置写进设备存储介质中。
系统提示请输入保存配置文件的文件名,注意文件名的格式为*.cfg(该实验中系统默认将配置文件保存在CF卡中),保存后文件名为[cf:/startup.cfg] ,如果不更改系统默认保存的文件名,请按Enter 键。
按Enter键后,如果选择了系统默认文件名来保存配置文件,系统会提示是否覆盖以前的配置文件。选择覆盖原来配置文件。
再次显示保存的配置。检查,与当前运行的配置相比,输出信息的区别在于
。原因是。步骤八:删除和清空配置
1.删除所配置的系统名称,应使用完整的命令为undo sysname 。
2.将设备恢复到出厂默认配置。首先在用户视图下执行resetsaved-configuration 命令清空保存配置,观察保存配置与当前配置有无不同。执行reboot 命令
重启设备,启动成功后在观察保存配置与当前配置有无不同,配置设备是否清空。
步骤九:显示文件目录
显示当前路径,应使用pwd 命令。输出信息说明当前路径为flash 。
显示当前路径上所有的文件,应使用dir 命令。记录从输出信息观察到的文件名称、尺寸和类型。
Directory of flash:/
0 drw- - Sep 27 2013 00:53:15 logfile
1 -rw- 9881 May 30 2016 19:55:23 config.cwmp
2 -rw- 1537 May 30 2016 19:55:2
3 startup.cfg
3 -rw- 10529 May 30 2016 19:55:23 system.xml
4 drw- - Sep 27 2013 00:53:52 diaglog
5 drw- - Sep 27 2013 00:53:52 seclog
6 drw- - Sep 2
7 2013 00:53:56 domain1
2540 KB total (2499 KB free)
步骤十:显示文本文件内容。
显示一个配置文件的内容,应使用的完整命令为用MORE命令,按?。
步骤十一:改变当前工作路径。
改变当前的工作路径,进入一个子目录,应使用的完整命令为system 。
退出当前目录,进入上一级目录,应使用的完整命令为quit 。
步骤十二:文件删除
保存一个配置文件并命名为myconfig.cfg,使用的完整命令为[RT1]save
The current configuration will be written to the device. Are you sure? [Y/N]:y
Please input the file name(*.cfg)[flash:/startup.cfg]
(To leave the existing filename unchanged, press the enter key): myconfig.cfg
Validating file. Please wait....
Configuration is saved to device successfully. 。
列出所有文件,确认该文件已经存在,使用完整命令为dir/all ,此时的空闲存储空间为2540 KB total (2497 KB free) 2499KB空闲。
删除该配置文件,使用的完整命令为
再次列出文件,确认该文件已经删除。此时的空闲存储空间为2495 KB free 。
删除myconfig.cfg文件前后的空闲存储空间有无变化。有,原因是文件被保存在回收站中,会占用存储空间。
使用dir /all 命令列出当前目录下包含隐藏文件在内的所有的文件及子文件夹信息。记录隐藏文件和回收站文件的名称。
Directory of flash:/
0 drw- - Sep 27 2013 00:53:15 logfile
1 -rwh 908 May 31 2016 17:11:59 private-data.txt
2 -rw- 9881 May 31 2016 17:11:59 config.cwmp
3 -rw- 1537 May 31 2016 17:06:12 startup.cfg
4 -rw- 10529 May 31 2016 17:11:59 system.xml
5 drw- - Sep 27 2013 00:53:52 diaglog
6 drw- - Sep 2
7 2013 00:53:52 seclog
7 drw- - Sep 27 2013 00:53:56 domain1
8 -rw- 1537 May 31 2016 17:15:23 [myconfig.cfg]
使用reset recycle-bin 命令清空回收站。再次显示包括隐藏文件在内的所有文件及子文件夹信息。输出结果与上次的区别在于有更多的空闲空间。
再次创建配置文件myconfig.cfg,用一条命令永久删除,使用的完整命令为
The contents cannot be restored!!! Delete flash:/myconfig.cfg?[Y/N]:y
Deleting a file permanently will take a long time. Please wait....%Delete file flash:/myconfig.cfg...Done.
。
再次列出所有文件,结果为
Directory of flash:/
0 drw- - Sep 27 2013 00:53:15 logfile
1 -rwh 908 May 31 2016 17:51:25 private-data.txt
2 -rw- 9881 May 31 2016 17:51:25 config.cwmp
3 -rw- 1537 May 31 2016 17:06:12 startup.cfg
4 -rw- 10529 May 31 2016 17:51:2
5 system.xml
5 drw- - Sep 27 2013 00:53:52 diaglog
6 drw- - Sep 2
7 2013 00:53:52 seclog
7 drw- - Sep 27 2013 00:53:56 domain1
8 -rw- 1537 May 31 2016 17:49:11 [myconfig.cfg]
2540 KB total (2488 KB free) 。实验任务三:通过Telnet登录
步骤一:通过console口配置Telnet用户
进入系统视图,创建一个用户,用户名为test。为该用户创建登录时认证密码,密码为test。要求显示配置是密码可以明文显示出来。设置该用户使用Telnet服务类型,该用户的优先级为level 0。使用的完整命令为
[XJH-luser-test] password simple test
[XJH-luser-test] service-type telnet
[XJH-luser-test] level 0
[XJH-luser-test] quit
骤二:配置super口令
设置将用户切换到level 3的密码为H3C,密码以明文显示,以便用户可以用super 命令从当前级别切换到level 3。使用的完整命令为
super password level 3 simple H3C
步骤三:配置登录欢迎信息
使用header login命令将登录验证时的欢迎信息设备为“Welcome to H3C world”。步骤四:配置对telnet用户使用缺省的本地认证
VTY口属于逻辑终端线,用于对设备进行Telnet或SSH访问。进入VTY 0~4用户界面,配置路由器使用本地认证授权方式(认证模式为scheme)。使用完整的命令应为user-interface vty 0 4
[XJH-ui-vty0-4]authentication-mode scheme
步骤五:进入接口视图,配置以太口和PC网卡地址
使用interface命令进入与PC相连的以太接口视图,使用ip address命令配置将路由器以太口地址配置为192.168.0.1/24。使用的完整命令应为
[XJH]interface GigabitEthernet 0/0/0
[XJH-GigabitEthernet0/0/0]ip add
[XJH-GigabitEthernet0/0/0]ip address 192.168.0.1 255.255.255.0
同时为PC配置一个与路由器接口相同网段的IP地址192.168.0.10/24
实验图1.4 PC机IP地址配置
配置完成后,在超级终端上能看到路由器接口Ethernet 0/1自动UP的信息。
步骤六:打开telnet服务
在路由器上启动telnet服务,应使用命令[XJH]telnet server enable 。
步骤七:使用telnet登录
使用交叉网线连接PC和路由器的以太口Ethernet 0/1。查看PC的连接状态和路由器的指示灯,确认连接成功。
检查路由器与PC的连通性,在路由器上使用的完整命令是ping 192.168.1.1 。
在PC命令行窗口中,使用telnet 192.168.0.1命令telnet到路由器的以太口IP地址,并按Enter键。输入telnet用户名及口令,进入命令行界面。按“?”键查看此时该用户权限(level 0)可使用的命令。
步骤八:更改登录用户级别
使用super命令切换用户级别切换到level 3,应使用的完整命令是super 3 。
按“?”键查看此时该用户(level 3)可使用的命令,并与level 0能够使用的命令
进行对比,区别是。步骤九:保存配置,重新启动
先保存当前配置,再重新启动系统。应使用reboot 命令重启系统。
先使用save命令保存当前配置到设备存储介质中,再使用reboot命令重新启动系统。实验任务四:使用FTP 上传下载系统文件
步骤一:通过console口配置FTP用户
添加一个本地用户,为其设置密码,设置该用户使用FTP服务类型,并设置该用户的优先级为level 3。使用的完整命令应为
[XJH-luser-test_ftp]local-user test_ftp
[XJH-luser-test_ftp]pass
[XJH-luser-test_ftp]password sim
[XJH-luser-test_ftp]password simple _ftp
[XJH-luser-test_ftp]ser
[XJH-luser-test_ftp]service-type ftp
[XJH-luser-test_ftp]le
[XJH-luser-test_ftp]level 3
步骤二:打开FTP服务
在路由器上启动FTP服务,使用完整命令应为[XJH]ftp server enable 。
步骤三:使用FTP登录
使用交叉网线连接PC和路由器的以太口,在PC命令行窗口中使用ftp命令对路由器发起FTP连接。输入FTP用户名及口令,确保FTP登录成功。
实验图1.5 PC客户端ftp界面
步骤四:使用FTP上传文件
使用put命令上传系统文件。实验中任意创建一个大小合适的文件来模拟系统文件,该文件应该存在于上传者的本地目录中,这里本地目录是“c:\documents and setting\administrator”
实验图1.6 ftp上传文件操作
上传成功后,用dir命令查看所有文件,确认文件上传成功。
步骤五:使用FTP下载文件
使用FTP中dir命令列出所有文件,其中默认的配置文件是。用FTP中的get命令将配置文件下载到PC本地目录,完成后在PC上检查相应的文件是否存在。
实验图1.7 ftp下载文件操作
全息照相实验报告 学院土环学院班级采矿1502 学号41501556 姓名殷苑文 一、实验目的与实验仪器 实验目的 1.了解全息照相的基本原理; 2.掌握全息照相方法及底片冲洗方法; 3.观察物象再现。 实验仪器 激光器,成套全息照相光具原件及隔振光学平台,白屏,硅光电池及电压表,全息干板,被照物体,显影液和定影液等。 二、实验原理(要求与提示:限400字以内,实验原理图须用手绘后贴图的方式) 全息记录 由光的波动理论知道,光波是电磁波。 一个实际物体发射或反射的光波比较复杂,但是一般可以看成是由许多不同频率的单色光波的叠加。因此,任何一定频率的光波都包含着振幅和位相两大信息。 全息照相的一种实验装置的光路如图1所示。激光器射出的激光束通过分光板分成两束,一束经透镜扩束后照射到被摄物体上,再经物体表面反射后照射到感光底片上,这部分光叫物光。另一束经反射镜改变光路,再由透镜扩大后直接投射到全息干版上,这部分光称为参考光。由于激光是相干光,物光和参考光在全息底片上叠加,形成干涉条纹。因为从被摄物体上各点反射出来的物光,在振幅上和相位上都不相同,所以底片上各处的干涉条纹也不相同。强度不同使条纹明暗程度不同,相位不同使条纹的密度、形状不同。因此,被摄物体反射光中的全部信息都以不同明暗程度和不同疏密分布的干涉条纹形式记录下来,经显影、定影等处理后,就得到一张全息照片。这种全息照片和普通照片截然不同,一般在全息照片上只有通过高倍显微镜才能看到明暗程度不同、疏密程度不同的干涉条纹。由于干涉条纹密度很高,所以要求记录介质有较高的分辨率,通常达1000 条线/毫米以上,故不能用普通照相底片拍摄全息图。
编号:QC/RE-KA5121 全息照相实验报告标准范本 The new situation in operation, especially the emergency, makes the information open and transparent by reporting the details, and then forms a closer cooperative relationship. (工作汇报示范文本) 编订:________________________ 审批:________________________ 工作单位:________________________
全息照相实验报告标准范本 使用指南:本报告文件适合在为规范管理,让所有人员增强自身的执行力,避免自身发展与集体的工作规划相违背,按固定模式形成日常报告进行上交最终实现及时更新进度,快速掌握所需了解情况的效果。文件可用word任意修改,可根据自己的情况编辑。 【实验目的】 1.了解全息照相的基本原理。 2.掌握全息照相以及底片的冲洗方法。 3.观察物象再现。 【实验仪器】 防震光学平台、氦氖激光器、高频滤波器)、扩束透镜(两个)、分束器、反射镜(两个)、全息Ⅰ型干版、显影液和定影液及暗房设备。 【实验原理】 全息照相与普通照相无论是在远离上还是在方发生都有本质的区别。普通照相
是用几何光学的方法记录物体上各点的发光强度分部,得到的是二维平面像,像上各点的照度与物体上的各点发光强度一一对应。而全息照相的记录对象是整个物体发出的光波(即物体上各点发出的光波的叠加),借助于参考光用干涉的方法记录这个物光波的振幅和位相(周相)分布,即记录下物光波与参考光波相干后的全部信息。此时,记录信息底片上得到的不是物体的像,而是细密的干涉条纹,就好像一个复杂无比的衍射光栅,必须经过适当的再照明,才能重建原来的无广播,从而再现物体的三维立体像。由于底片上任何一小部分都包含整个物体的信息,因此,只利用拍摄的全息底片的一小部分也能再现整个
人工智能实验报告大 全
人工智能课内实验报告 (8次) 学院:自动化学院 班级:智能1501 姓名:刘少鹏(34) 学号: 06153034 目录 课内实验1:猴子摘香蕉问题的VC编程实现 (1) 课内实验2:编程实现简单动物识别系统的知识表示 (5)
课内实验3:盲目搜索求解8数码问题 (18) 课内实验4:回溯算法求解四皇后问题 (33) 课内实验5:编程实现一字棋游戏 (37) 课内实验6:字句集消解实验 (46) 课内实验7:简单动物识别系统的产生式推理 (66) 课内实验8:编程实现D-S证据推理算法 (78)
人工智能课内实验报告实验1:猴子摘香蕉问题的VC编程实现 学院:自动化学院 班级:智能1501 姓名:刘少鹏(33) 学号: 06153034 日期: 2017-3-8 10:15-12:00
实验1:猴子摘香蕉问题的VC编程实现 一、实验目的 (1)熟悉谓词逻辑表示法; (2)掌握人工智能谓词逻辑中的经典例子——猴子摘香蕉问题的编程实现。 二、编程环境 VC语言 三、问题描述 房子里有一只猴子(即机器人),位于a处。在c处上方的天花板上有一串香蕉,猴子想吃,但摘不到。房间的b处还有一个箱子,如果猴子站到箱子上,就可以摸着天花板。如图1所示,对于上述问题,可以通过谓词逻辑表示法来描述知识。要求通过VC语言编程实现猴子摘香蕉问题的求解过程。 图1 猴子摘香蕉问题
四、源代码 #include
物理与光电工程学院 光电信息技术实验报告 姓名:张皓景 学号: 班级:光信息科学与技术专业2011级2班实验名称:全息照相实验 任课教师:裴世鑫
一、实验目的 1.了解光学全息照相的基本原理及其主要特点。 2.学习全息照相的拍摄方法和实验技术。 3.了解全息照相再现物像的性质、观察方法。 二、实验仪器 三、实验装置示意图 5底片 图1 全息照相光路 四、实验原理 全息照相是一种二步成像的照相技术。第一步采用相干光照明,利用干涉原理,把物体
在感光材料(全息干版)处的光波波前纪录下来,称为全息图。第二步利用衍射原理,按一定条件用光照射全息图,原先被纪录的物体光波的波前,就会重新激活出来在全息图后继续传播,就像原物仍在原位发出的一样。需要注意的是我们看到的“物”并不是实际物体,而是与原物完全相同的一个三维像。 1.全息照相的纪录——光的干涉 由光的波动理论知道,光波是电磁波。一列单色波可表示为: 2cos(t )r x A πω?λ=+- (1) 式中,A 为振幅,ω 为圆频率,λ 为波长,φ 为波源的初相位。 一个实际物体发射或反射的光波比较复杂,但是一般可以看成是由许多不同频率的单色光波的叠加: 12cos(t )n i i i i i r x A πω?λ==+- ∑ (2) 因此,任何一定频率的光波都包含着振幅(A )和位相(ωt+φ-2πr/λ)两大信息。 全息照相的一种实验装置的光路如图(1)所示。激光器射出的激光束通过分光板分成两束,一束经透镜扩束后照射到被摄物体上,再经物体表面反射(或透射)后照射到感光底片(全息干版)上,这部分光叫物光。另一束经反射镜改变光路,再由透镜扩大后直接投射到全息干版上,这部分光称为参考光。由于激光是相干光,物光和参考光在全息底片上叠加,形成干涉条纹。因为从被摄物体上各点反射出来的物光,在振幅上和相位上都不相同,所以底片上各处的干涉条纹也不相同。强度不同使条纹明暗程度不同,相位不同使条纹的密度、形状不同。因此,被摄物体反射光中的全部信息都以不同明暗程度和不同疏密分布的干涉条纹形式记录下来,经显影、定影等处理后,就得到一张全息照片。这种全息照片和普通照片截然不同,一般在全息照片上只有通过高倍显微镜才能看到明暗程度不同、疏密程度不同的干涉条纹。由于干涉条纹密度很高,所以要求记录介质有较高的分辨率,通常达1000 条线/毫米以上,故不能用普通照相底片拍摄全息图。 2.全息照相的再现——光的衍射 由于全息照相在感光板上纪录的不是被摄物的直接形象,而是复杂的干涉条纹,因此全息照片实际上相当于一个衍射光栅,物象再现的过程实际是光的衍射现象。要看到被摄物体的像,必须用一束同参考光的波长和传播方向完全相同的光束照射全息照片,这束光叫再现光。这样在原先拍摄时放置物体的方向上就能看到与原物形象完全一样的立体虚像。如图2 所示把拍摄好的全息底片放回原光路中,用参考光波照射全息片时,经过底片衍射后有三部分光波射出。 0 级衍射光——它是入射再现光波的衰减。 +1 级衍射光——它是发散光,将形成一个虚像。如果此光波被观察者的眼睛接收,就等于接收了原被摄物发出的光波,因而能看到原物体的再现像。
实验四有限状态机实验 实验报告 一、实验目的 通过蚂蚁世界实验掌握游戏中追有限状态机算法 二、实验仪器 Windows7系统 Microsoft Visual Studio2015 三、实验原理及过程 1)制作菜单 设置参数:点击会弹出对话框,设置一些参数,红、黑蚂蚁的家会在地图上标记出来 运行:设置好参数后点击运行,毒药、食物、水会在地图上随机显示 下一步:2只红蚂蚁和2只黑蚂蚁会随机出现在地图上,窗口右方还会出现红、黑蚂蚁当前数量的统计 不断按下一步,有限状态机就会不断运行,使蚁群产生变化 2)添加加速键 资源视图中 下方
选择ID和键值 3)新建头文件def.h 在AntView.cpp中加入#include"def.h" 与本实验有关的数据大都是在这里定义的 int flag=0; #define kForage 1 #define kGoHome 2 #define kThirsty 3 #define kDead 4 #define kMaxEntities 200 class ai_Entity{ public: int type; int state; int row; int col; ai_Entity(); ~ai_Entity() {} void New (int theType,int theState,int theRow,int theCol); void Forage(); void GoHome(); void Thirsty(); void Dead(); }; ai_Entity entityList[kMaxEntities]; #define kRedAnt 1 #define kBlackAnt 2
实验名称:第十一章最短路问题 一、实验内容与要求 掌握Dijkstra算法和Floyd算法,并运用这两种算法求一些最短路径的问题。 二、实验软件 MATLAB7.0 三、实验内容 1、在一个城市交通系统中取出一段如图所示,其入口为顶点v1,出口为顶点v8,每条弧段旁的数字表示通过该路段所需时间,每次转弯需要附加时间为3,求v1到v8的最短时间路径。 V1 1 V2 3 V3 1 V5 6 V6 V4 2 V7 4 V8
程序: function y=bijiaodaxiao(f1,f2,f3,f4) v12=1;v23=3;v24=2;v35=1;v47=2;v57=2;v56=6;v68=3;v78=4; turn=3; f1=v12+v23+v35+v56+turn+v68; f2=v12+v23+v35+turn+v57+turn+v78; f3=v12+turn+v24+turn+v47+v78; f4=v12+turn+v24+v47+turn+v57+turn+v56+turn+v68; min=f1; if f2 f4 实验结果: v1到v8的最短时间路径为15,路径为1-2-4-7-8. 2、求如图所示中每一结点到其他结点的最短路。V110 V3V59 V6 floy.m中的程序: function[D,R]=floyd(a) n=size(a,1); D=a for i=1:n for j=1:n R(i,j)=j; end end R for k=1:n for i=1:n for j=1:n if D(i,k)+D(k,j) 全息照相实验报告 程子豪 2010035012 少年班01 一、实验目的: 1.了解全息照相记录和再现的基本原理和主要特点; 2.学习全息照相的操作技术; 3.观察和分析全息图的成像特性。 二、实验原理: 2.1全息照相原理的文字表述: 普通照相底片上所记录的图像只反映了物体上各点发光(辐射光或反射光)的强弱变化,显示的只是物体的二维平面像,丧失了物体的三维特征。全息照相则不同,它是借助于相干的参考光束和物光束相互干涉来记录物光振幅和相位的全部信息。这样的照相把物光束的振幅和相位两种信息全部记录下来,因而称为全息照相。 全息照相的基本原理早在1948年就由伽伯(D. Gabor)发现,但是由于受光源的限制(全息照相要求光源有很好的时间相干性和空间相干性),在激光出现以前,对全息技术的研究进展缓慢,在60年代激光出现以后,全息技术得到了迅速的发展。目前,全息技术在干涉计量、信息存储、光学滤波以及光学模拟计算等方面得到了越来越广泛的应用。伽伯也因此而获得了1971年度的诺贝尔物理学奖。 全息照相在记录物光的相位和强度分布时,利用了光的干涉。从光的干涉原理可知:当两束相干光波相遇,发生干涉叠加时,其合强度不仅依赖于每一束光各自的强度,同时也依赖于这两束光波之间的相位差。在全息照相中就是引进了一束与物光相干的参考光,使这两束光在感光底片处发生干涉叠加,感光底片将与物光有关的振幅和位相分别以干涉条纹的反差和条纹的间隔形式记录下来,经过适当的处理,便得到一张全息照片。 具体来说,全息照相包括以下两个过程: 1、波前的全息记录 利用干涉的方法记录物体散射的光波在某一个波前平面上的复振幅分布,这就是波前的全息记录。通过干涉方法能够把物体光波在某波前的位相分布转换成光强分布,从而被照相底片记录下来,因为我们知道,两个干涉光波的振幅比和位相差决定着干涉条纹的强度分布,所以在干涉条纹中就包含了物光波的振幅和位相信息。典型的全息记录过程是这样的:从激光器发出的相干光波被分束镜分成两束,一束经反射、扩束后照在被摄物体上,经物体的反射或透射的光再射到感光底片上,这束光称为物光波;另一束经反射、扩束后直接照射在感光底片上,这束光称为参考光波。由于这两束光是相干的,所以在感光底片上就形成并记录了明暗相间的干涉条纹。干涉条纹的形状和疏密反映了物光的位相分布的情况,而条纹明暗的反差反映了物光的振幅,感光底片上将物光的信息都记录下来了,经过显影、定影处理后,便形成与光栅相似结构的全息图—全息照片。所以全息图不是别的,正是参考光波和物光波干涉图样的记录。显然,全息照片本身和原来物体没有任何相似之处。 2、衍射再现 物光波前的再现利用了光波的衍射。用一束参考光(在大多数情况下是与记录全息图时用的参考光波完全相同)照射在全息图上,就好像在一块复杂光栅上发生衍射,在衍射光波中将包含有原来的物光波,因此当观察者迎着物光波方向观察时,便可看到物体的再现像。这是一个虚像,它具有原始物体的一切特征。此外还有一个实像,称为共轭像。应该指出,共轭波所形成的实像的三维结构与原物并不完全相似。 实验报告实验三十四全息照相 物理学院1300061311 二下 6 组 03 号 2015.4.15 一. 实验目的 1?了解全息照相的基本原理; 2?学习全息照相的实验技术,拍摄合格的全息图; 3 ?了解摄影暗室技术. 二. 实验仪器 光学平台,He-Ne 激光器及电源,快门及定时曝光器,扩束透镜,反射镜和 分束器,光功率计,全息底片,被摄物体,显微镜,暗室技术使用的设备. 三. 实验原理 全息照相中所记录和重现的是物光波前的振幅和相位,即全部信息,这是全 息照相名称的山来?但是,感光乳胶和一切光敬元件都是“相位盲S 不能直接记 录相位?必须借助于一束相干参考光,通过拍摄物光和参考光的干涉条纹,间接 记录下物光的振幅和相位?直接观察拍好的全息图,看不到像?只有照明光按一定 方向照在全息图上,通过全息图的衍射,才能重现物光波前,使我们看到物的立 体像?故全息照相包括波前的全息记录和重现两部分内容。下面是透射式全息照 相原理。 1?全息记录 如果将物光和参考光的干涉条纹用感光底片记录下来,那就记录了底片所在位 置物光波前的振幅和相位 物光一点发出的球面波波前: 〃0(如刃=人(忑y )exp [诫)(兀y )] 参考光波前: 则底片上总复振幅: 光强分布: Ig) = UU 感光底片在曝光后经显影和定影等暗室技术处理,成为全息图?适当控制曝光 量及显影条件,可以使全息图的振幅透过率:与曝光量E (正比于光强1)成线性关 系,即 心,刃=山一例(九y ) ? 2兀 匕(兀 y) = A r exp[/ — ysina] Ug y) = U Q (x.y)+U r (x, y) 人工智能课内实验报告 (8次) 学院:自动化学院 班级:智能1501 姓名:刘少鹏(34) 学号: 06153034 目录 课内实验1:猴子摘香蕉问题的VC编程实现 (1) 课内实验2:编程实现简单动物识别系统的知识表示 (5) 课内实验3:盲目搜索求解8数码问题 (18) 课内实验4:回溯算法求解四皇后问题 (33) 课内实验5:编程实现一字棋游戏 (37) 课内实验6:字句集消解实验 (46) 课内实验7:简单动物识别系统的产生式推理 (66) 课内实验8:编程实现D-S证据推理算法 (78) 人工智能课内实验报告实验1:猴子摘香蕉问题的VC编程实现 学院:自动化学院 班级:智能1501 姓名:刘少鹏(33) 学号: 06153034 日期: 2017-3-8 10:15-12:00 实验1:猴子摘香蕉问题的VC编程实现 一、实验目的 (1)熟悉谓词逻辑表示法; (2)掌握人工智能谓词逻辑中的经典例子——猴子摘香蕉问题的编程实现。 二、编程环境 VC语言 三、问题描述 房子里有一只猴子(即机器人),位于a处。在c处上方的天花板上有一串香蕉,猴子想吃,但摘不到。房间的b处还有一个箱子,如果猴子站到箱子上,就可以摸着天花板。如图1所示,对于上述问题,可以通过谓词逻辑表示法来描述知识。要求通过VC语言编程实现猴子摘香蕉问题的求解过程。 图1 猴子摘香蕉问题 四、源代码 #include 实验5.5 全息照相 实验分析: 在这次光学实验中,拍出来的全息照片图像模糊,而且曝光范围小,基本算失败,对此我觉得我们必然在某处有错误,或者是由于实验仪器造成,因此我展开分析,实验失败原因可能有: 1.在曝光过程中有振动或位移,由于全息图上所记录的是参考光 和物光的干涉条纹, 而这些条纹非常细, 在曝光过程中, 极 小的振动和位移都会引起干涉条纹的模糊不清, 甚至使干涉 条纹完全不能记录下来。 2.没有更好的调整好参考光和物光的光程差。参考光和物光的光 程差不能太大也不能太小, 不能大于所用激光的相干长度, 否则两者不能相干, 无法在全息干板上获得干涉条纹。 3.没有更好的调整好参考光和物光的夹角。假设全息干板上干涉 条纹的间距为d, 光源波长为λ。根据干涉原理, d 与参考光 和物光之间的夹角θ关系为, 而干板分辨率 η 与d 的关系为。可以看出, θ愈大, 所记录的干涉条纹就越细, 对干板的分辨率要求越高,故夹角 θ不能太大。而夹角θ对全息图再现像时的观察窗(视角) 有 影响, 夹角大, 可在较大范围内从不同角度观察物象, 反之, 观察窗则小, 因此夹角θ也不能太小。 4.光路中使用过多反光镜导致光强过小,从而影响干涉效果。 5.曝光时间没有控制得很好,曝光时间太长, 导致干板太黑, 光 线的透过率降低。 C C 6.在用清水清洗干版时水温没有严格控制在30-32,影响 实验结果。 7.在显影定影时,冲洗时间不够,导致成像范围过小,成像不清 晰。 实验结论: 实验中获得清晰的再现像的关键是要选用具有良好的相干性和稳定性的激光作为光源。光路的调整更是至关重要的。一个好的光路,既要使物光和参考光能够发生干涉,还要保证干涉条纹间隔清晰,反差合适。所以要首先调整好物光和参考光的光程,以保证干涉能够发生,然后再调整物光与参考光束之间的夹角及物光和参考光的光强比, 保证全息照片的清晰度和反差。另外,在曝光时系统要稳定。 全息照相实验报告 【实验目的】 1.了解全息照相的基本原理。 2.掌握全息照相以及底片的冲洗方法。 3.观察物象再现。 【实验仪器】 防震光学平台、氦氖激光器、高频滤波器)、扩束透镜(两个)、分束器、反射镜(两个)、全息Ⅰ型干版、显影液和定影液及暗房设备。 【实验原理】 全息照相与普通照相无论是在远离上还是在方发生都有本质的区别。普通照相是用几何光学的方法记录物体上各点的发光强度分部,得到的是二维平面像,像上各点的照度与物体上的各点发光强度一一对应。而全息照相的记录对象是整个物体发出的光波(即物体上各点发出的光波的叠加),借助于参考光用干涉的方法记录这个物光波的振幅和位相(周相)分布,即记录下物光波与参考光波相干后的全部信息。此时,记录信息底片上得到的不是物体的像,而是细密的干涉条纹,就好像一个复杂无比的衍射光栅,必须经过适当的再照明,才能重建原来的无广播,从而再现物体的三维立体像。由于底片上任何一小部分都包含整个物体的信息,因此,只利用拍摄的全息底片的一小部分也能再现整个物像。 1.全息记录 全息照相的光路图如下图所示: 感光底板 用激光光源照射物体,物体因漫反射发出物光波。波场上没一点的振幅和相位都是空间坐标的函数。我们用O表示物光波没一点的复振幅与相位。用同一激光管员经分光板分出的另一部分光直接照射到地板上,这个光波称为参考光波,它的振幅和相位也是空间坐标的函数,其复振幅和位相用R表示,草考光通常为平面或球面波。这样在记录信息的底板上的总光场是物光与参考光的叠加。叠加后的复振幅为O+R,如图从而底板上各点的发光强度分布为 I(OR)(O*R*)OO*RR*OR*O*RIOIROR*O*R (式1) 式子中,O*与R*分别是O和R的共轭量;I。,IR分别为物光波和参考光波独立照射底版时的放光强度。 2.物相再现 3.底板经过曝光冲洗后,形成各处透光率不同的全息照片,它相当于一个复杂的光栅。一般来说,光透过这样的全息照片时,振幅以及位相都要发生变化。如果令 t=透过光的复振幅/入射光的复振幅(式2) 则复振幅透过率t一般为复数。但对于平面吸收型全息照片t为实数。如果曝光及冲洗合适,可使得 tt0KI (式3) 实验报告 1.对CLIPS和其运行及推理机制进行介绍 CLIPS是一个基于前向推理语言,用标准C语言编写。它具有高移植性、高扩展性、 强大的知识表达能力和编程方式以及低成本等特点。 CLIPS由两部分组成:知识库、推理机。它的基本语法是: (defmodule< module-n ame >[< comme nt >]) CLIPS的基本结构: (1).知识库由事实库(初始事实+初始对象实例)和规则库组成。 事实库: 表示已知的数据或信息,用deftemplat,deffact定义初始事实表FACTLIS,由关系名、后跟 零个或多个槽以及它们的相关值组成,其格式如下: 模板: (deftemplate 北京邮电大学 思想政治理论课社会调查报告 题目: 姓名: 班级: 学院: 2012年8月20日 2、摘要 关于我国邮电通信,互联网发展和使用状况的调查关键字: 3、正文 3.1关于我国邮电通信的发展 “十一五”期间,我国邮电通信业以科学发展观为主导,围绕加快转变发展方式的主线,积极推动行业转型发展,3G建设和业务发展稳步推进,移动互联网业务蓬勃发展,快递业务快速增长,邮电通信业服务能力、服务水平和服务质量均有较大提高。 (一)邮政基础设施水平明显提升 “十一五”期间,国家安排专项资金,用于西部和农村地区邮政普遍服务网点改造,邮政网点建设取得明显成效。一是国家加大投资力度,计划在2010—2012年3年内,补建2500多个空白乡镇邮政局所,改造西部及农村地区网点7000多个,目前2500多个局所建设任务进入实施阶段,邮政基础网络得到强化。到2010年底,全国营业网点达到6.2万处,其中邮政局所和代办点约5万处;全国平均每一营业网点服务面积150平方公里,服务人口2万人。二是全国28个省(区、市)邮政管理局与当地建设行政主管部门联合发布政策文件,推进信报箱建设,全国新建住宅楼信报箱安装率明显提高。 5年间,邮政企业持续推进普邮和速递物流网络建设,完成350个重点城市的投递网改造,网络能力稳步提升。目前,我国邮政网络覆盖城乡,已经成为世界规模最大的邮政网络之一。到2010年末,全国邮路总条数为2.2万条,邮路总长度达到410万公里,比2005年增加69万公里。其中:航空邮路220万公里、铁路邮路25万公里、汽车邮路150万公里。 全国邮政行业信息化建设步伐加快。到2010年底,80%以上支局实现电子化,同时完成了名址信息库、电子商务信息平台和营业网运互联互通等一批重点信息化项目建设。【1】 3.2关于我国邮电通信的使用状况 “十一五”期间,随着通信能力的提高,传统邮政业务稳步发展,电信业务快速增长。2010年,全年完成邮电业务总量32940.2亿元,比2005年增长1.7倍,年均增长21.7%。 (一)传统邮政业务稳步发展 2010年,全国完成邮政业务总量1985.3亿元,比2005年增长1.2倍,年均增长16.9%。 近几年来,由于互联网的广泛应用,对邮政业务的冲击和影响较大,但邮政企业始终把做好邮政普遍服务和特殊服务作为重要的政治任务。尤其是在国家遇到重大自然灾害面前,在奥运会、世博会和亚运会等国家重大活动中,邮 实验十一心的位置、外形 【实践情境】 李叔叔,55岁,因冠状动脉粥样硬化性心脏病、左室前大面积心肌梗死入院就诊,冶疗期间突发心脏骤停,护士小齐发现后立即对其行心肺复苏技术。【护理操作】 心肺复苏技术是针对各种原因导致呼吸、心搏骤停,必须紧急采取重建和促进心脏、呼吸有效功能恢复的一系列措施。 【实践材料】 1.心肺复苏技术操作视频 2.胸腔纵隔标本(十字形切开心包) 3.完整的离体心标本和模型 【实践任务】 任务1.观看心肺复苏技术操作视频,描述心的体表投影。 心的体表投影,左上点,左下点,右下点,右上点。 任务2.观察心的位置、外形及毗邻关系。 任务3.观察心脏离体标本和模型,指认心尖、心底,胸肋面和膈面,左缘、右缘、下缘、冠状沟、前室间沟、后室间沟及沟内心的血管。 任务 4.观察心的模型和切开心房、心室的离体标本片旨认心腔内各结构及相互间的关系。 任务5.观察示心传导系统的模型,说出心传导系统组成。 任务6、观察心的血管标本,指出冠状动脉的分布和静脉回流,结合实践情境讨论李叔叔心肌梗死的解剖学位置 任务7.镜下观察心壁的微细结构切片,说出心壁的构成。 实验实训报告 实验实训项目名称实验实训类型 实验实训室 时间20 年月日 第节 指导老师 一、实验目的: 二、实验内容: 三、实验结果 ①② ③④ ⑤⑥ ⑦⑧ 1.写出各心房、心室入口、出口。 2.二尖瓣位于,三尖瓣位于。 3.心尖搏动点为;心左缘主要由构成,心右缘主要由构成,心下缘主要由和构成。 实验十二传导系统和血管 【实践情境】 李叔叔,55岁,因冠状动脉粥样硬化性心脏病、左室前大面积心肌梗死入院就诊,冶疗期间突发心脏骤停,护士小齐发现后立即对其行心肺复苏技术。【护理操作】 心肺复苏技术是针对各种原因导致呼吸、心搏骤停,必须紧急采取重建和促进心脏、呼吸有效功能恢复的一系列措施。 【实践材料】 1.完整的离体心标本和模型 2.示心传导系统的心模型 3.心壁微细结构切片(HE染色) 【实践任务】 任务1.观察示心传导系统的模型,说出心传导系统组成。 任务2.观察心的血管标本,指出冠状动脉的分布和静脉回流,结合实践情境讨论李叔叔心肌梗死的解剖学位置 任务3.镜下观察心壁的微细结构切片,说出心壁的构成。 全息照相实验报告 班级:XXX :XXX 学号:XXX 时间:XXX 【实验目的】 1.了解全息照相的基本原理。 2.掌握全息照相以及底片的冲洗方法。 3.观察物象再现。 【实验仪器】 防震光学平台、氦氖激光器、曝光定时器及快门、扩束透镜(两个)、分束器、反射镜(两个)、全息Ⅰ型干版、显影液和定影液及暗房设备。 【实验原理】 全息照相与普通照相无论是在远离上还是在方发生都有本质的区别。普通照相是用几何光学的方法记录物体上各点的发光强度分部,得到的是二维平面像,像上各点的照度与物体上的各点发光强度一一对应。而全息照相的记录对象是整个物体发出的光波(即物体上各点发出的光波的叠加),借助于参考光用干涉的方法记录这个物光波的振幅和位相(周相)分布,即记录下物光波与参考光波相干后的全部信息。此时,记录信息底片上得到的不是物体的像,而是细密的干涉条纹,就好像一个复杂无比的衍射光栅,必须经过适当的再照明,才能重建原来的无广播,从而再现物体的三维立体像。由于底片上任何一小部分都包含整个物体的信息,因此,只利用拍摄的全息底片的一小部分也能再现整个物像。 1.全息记录 全息照相的光路图如下图所示: 用激光光源照射物体,物体因漫反射发出物光波。波场上没一点的振幅和相位都是空间坐标的函数。我们用O 表示物光波没一点的复振幅与相位。用同一激光管员经分光板分出的另一部分光直接照射到地板上,这个光波称为参考光波,它的振幅和相位也是空间坐标的函数,其复振幅和位相用R 表示,草考光通常为平面或球面波。这样在记录信息的底板上的总光场是物光与参考光的叠加。叠加后的复振幅为O+R ,如图从而底板上各点的发光强度分布为 ********()()O R I O R O R OO RR OR O R I I OR O R =++=+++=+++ (式1) 式子中,O*与R*分别是O 和R 的共轭量;I 。,IR 分别为物光波和参考光波独立照射底版时 感光底板 人工智能课程项目报告 姓名: 班级:二班 一、实验背景 在新的时代背景下,人工智能这一重要的计算机学科分支,焕发出了他强大的生命力。不仅仅为了完成课程设计,作为计算机专业的学生, 了解他,学习他我认为都是很有必要的。 二、实验目的 识别手写字体0~9 三、实验原理 用K-最近邻算法对数据进行分类。逻辑回归算法(仅分类0和1)四、实验内容 使用knn算法: 1.创建一个1024列矩阵载入训练集每一行存一个训练集 2. 把测试集中的一个文件转化为一个1024列的矩阵。 3.使用knnClassify()进行测试 4.依据k的值,得出结果 使用逻辑回归: 1.创建一个1024列矩阵载入训练集每一行存一个训练集 2. 把测试集中的一个文件转化为一个1024列的矩阵。 3. 使用上式求参数。步长0.07,迭代10次 4.使用参数以及逻辑回归函数对测试数据处理,根据结果判断测试数 据类型。 五、实验结果与分析 5.1 实验环境与工具 Window7旗舰版+ python2.7.10 + numpy(库)+ notepad++(编辑) Python这一语言的发展是非常迅速的,既然他支持在window下运行就不必去搞虚拟机。 5.2 实验数据集与参数设置 Knn算法: 训练数据1934个,测试数据有946个。 数据包括数字0-9的手写体。每个数字大约有200个样本。 每个样本保持在一个txt文件中。手写体图像本身的大小是32x32的二值图,转换到txt文件保存后,内容也是32x32个数字,0或者1,如下图所 示 建立一个kNN.py脚本文件,文件里面包含三个函数,一个用来生成将每个样本的txt文件转换为对应的一个向量:img2vector(filename):,一个用 来加载整个数据库loadDataSet():,最后就是实现测试。 光学全息照相实验报告 实验II 光学全息照相 光学全息照相是利用光波的干涉现象,以干涉条纹的形式,把被摄物表面光波的振幅和位相信息记录下来,它是记录光波全部信息的一种有效手段。这种物理思想早在1948年伽柏(D.Gabor)即就已提出来了,但直到1960年,随着激光器的出现,获得了单色性和相干性极好的光源时,才使光学全息照相技术的研究和应用得到迅速地发展。光学全息照相在精密计量、无损检测、遥感测控、信息存储和处理、生物医学等方面的应用日益广泛,另外还相应出现了微波全息,X光全息和超声全息等新技术,全息技术已发展成为科学技术上的一个新领域。 本实验通过对三维物体进行全息照相并再现其立体图像,了解全息照相的基本原理及特点,学习拍摄方法和操作技术,为进一步学习和开拓应用这一技术奠定基础。 实验目的 了解光学全息照相的基本原理和主要特点; 学习静态光学全息照相的实验技术; 观察和分析全息全图的成像特性。 仪器用具 全息台、He —Ne 激光器及电源、分束镜、全反射镜、扩束透镜、曝光定时器、全息感光底版等。 基本原理 全息照片的拍摄 全息照相是利用光的干涉原理将光波的振幅和相位信息同时记录在感光板上的过程.相干光波可以是平面波也可以是球面波,现以平面波为例说明全息照片拍摄的原理。如图1所示,一列波函数为t i ae y πυ21=、振幅为a 、频率为υ、波长为λ 的平面单色光波作为参考光垂直入射到感光板上。另一列同频率、波函数为t i r T t i Be be y πυλπ222==??? ??-的相 干平面单色光波从物体出发,称为物光,以入射角θ同时入射到感光板上,物光与参考光产生干涉,在感光板上形成的光强分布为 ax ab b a I cos 222++= (1) 《一人工智能方向实习一》 实习报告 专业:计算机科学与技术 班级:12419013 学号: 姓名: 江苏科技大学计算机学院 2016年3月 实验一数据聚类分析 一、实验目的 编程实现数据聚类的算法。 二、实验内容 k-means聚类算法。 三、实验原理方法和手段 k-means算法接受参数k ;然后将事先输入的 n个数据对象划分为 k个聚类以便使得 所获得的聚类满足:同一聚类中的对象相似度较高 四、实验条件 Matlab2014b 五、实验步骤 (1)初始化k个聚类中心。 (2)计算数据集各数据到中心的距离,选取到中心距离最短的为该数据所属类别。 (3)计算(2)分类后,k个类别的中心(即求聚类平均距离) (4)继续执行(2)(3)直到k个聚类中心不再变化(或者数据集所属类别不再变化) 六、实验代码 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % mai n.m % k-mea ns algorithm % @author matcloud %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% clear; close all ; load fisheriris ; X = [meas(:,3) meas(:,4)]; figure; plot(X(:,1),X(:,2), 'ko' ,'MarkerSize' ,4); title( 'fisheriris dataset' , 'FontSize' ,18, 'Color' , 'red'); [idx,ctrs] = kmea ns(X,3); figure; subplot(1,2,1); plot(X(idx==1,1),X(idx==1,2), 'ro' , 'MarkerSize' ,4); hold on; 《实用软件工程技术》实验报告实验名称:软件测试 班级:计应1202 姓名:马宝卫 指导教师: 实验日期: 一.实验目的 1.熟悉软件测试的过程; 2.掌握黑盒测试用例的设计方法; 3.熟悉黑盒测试特点和应用场合。 二.实验步骤与任务 1.黑盒测试实验任务 对“三角形判断”模块实施黑盒测试。 实验步骤 (1)接收实验任务,分析“三角形判断”模块的输入和输出。 (2)根据输入和输出的对应关系,采用等价类划分法设计出黑盒测试用例。 (3)启动程序,实施测试过程,根据测试用例给输入,记录实际的输出结果。 (4)所有测试用例均测试后,分析测试结果,总结该程序中存在的问题。 (5)撰写实验报告。 实验结束,上交实验报告电子稿,以及被测试的程序。 2.黑盒测试练习题 ●城市的电话号码由两部分组成。这两部分的名称和内容分别是: 地区码:以0开头的三位或者四位数字(包括0); 电话号码:以非0、非1开头的七位或者八位数字。 假定被调试的程序能接受一切符合上述规定的电话号码,拒绝所有不符合规定的号码,请使用等价分类法来设计它的测试用例。 ●输入:用户密码 要求: 1)用户密码为6到8位。 2)必须含有字母和数的组合。 输出:如正确,输出正确的信息。否则,输出相应的错误信息。 请等价类划分法设计出相应的测试用例。 三.实验结果 1.黑盒测试实验任务 测试用例设计 测试结果记录 测试结果分析 2.黑盒测试练习题 1) 四.心得体会 1、测试用例要根据测试大纲来编写 2、测试用例也要分测试项进行归类,这样比较好分析和阅读。如:业务流程测试、安装测试、功能测试、用户友好性测试、兼容性测试、性能测 试、安全性测试等等。 3、编写测试用例要考虑各种情况,精力主要集中在软件的主要业务流程和风险高的地方。能分出测试优先级别就最好了。 4、熟悉系统,对编写测试用例很有帮助。 5、即使对测试很熟悉了,在时间非常紧的时候,编写测试用例还是很有必要和好处的。 全息照相实验报告 全息照相实验报告 【实验目的】 1.了解全息照相的基本原理。 2.掌握全息照相以及底片的冲洗方法。 3.观察物象再现。 【实验仪器】 防震光学平台、氦氖激光器、高频滤波器)、扩束透镜(两个)、分束器、反射镜(两个)、全息Ⅰ型干版、显影液和定影液及暗房设备。 【实验原理】 全息照相与普通照相无论是在远离上还是在方发生都有本质的区别。普通照相是用几何光学的方法记录物体上各点的发光强度分部,得到的是二维平面像,像上各点的照度与物体上的各点发光强度一一对应。而全息照相的记录对象是整个物体发出的光波(即物体上各点发出的光波的叠加),借助于参考光用干涉的方法记录这个物光波的振幅和位相(周相)分布,即记录下物光波与参考光波相干后的全部信息。此时,记录信息底片上得到的不是物体的像,而是细密的干涉条纹,就好像一个复杂无比的衍射光栅,必须经过适当的再照明,才能重建原来的无广播,从而再现物体的三维立体像。由于底片上任何一小部分都包含整个物体的信息,因此,只利用拍摄的全息底片的一小部分也能再现整个物像。 1.全息记录 全息照相的光路图如下图所示: 感光底板 用激光光源照射物体,物体因漫反射发出物光波。波场上没一点的振幅和相位都是空间坐标的函数。我们用O表示物光波没一点的复振幅与相位。用同一激光管员经分光板分出的另一部分光直接照射到地板上,这个光波称为参考光波,它的振幅和相位也是空间坐标的函数,其复振幅和位相用R表示,草考光通常为平面或球面波。这样在记录信息的底板上的总光场是物光与参考光的叠加。叠加后的复振幅为O+R,如图从而底板上各点的发光强度分布为 I(O R)(O*R*)OO*RR*OR*O*R IO IR OR*O*R (式1) 式子中,O*与R*分别是O和R的共轭量;I。,IR分别为物光波和参考光波独立照射底版时的放光强度。 2.物相再现 3.底板经过曝光冲洗后,形成各处透光率不同的全息照片,它相当于一个复杂的光栅。一般来说,光透过这样的全息照片时,振幅以及位相都要发生变化。如果令 t=透过光的复振幅/入射光的复振幅(式2) 则复振幅透过率t一般为复数。但对于平面吸收型全息照片t为实数。如果曝光及冲洗合适,可使得 t t0KI (式3) 物象再现是用光照射已经摄制好的全息照片并观察透过光。这个过程称为波全息照相实验的报告材料
光全息照相实验报告
人工智能实验报告大全
全息照相实验报告(完全版).docx
【实验报告】全息照相实验报告
人工智能实验报告
实验报告
解剖实训实验报告(下)实验十一 心的位置
全息照相实验报告
人工智能实验报告
光学全息照相实验报告
人工智能实验报告
实验报告十一
全息照相实验报告
相关主题
文本预览