
排气阀对流换热瞬态温度场有限元分析
一、有限元模型的建立及计算分析
1.排气阀实体建模
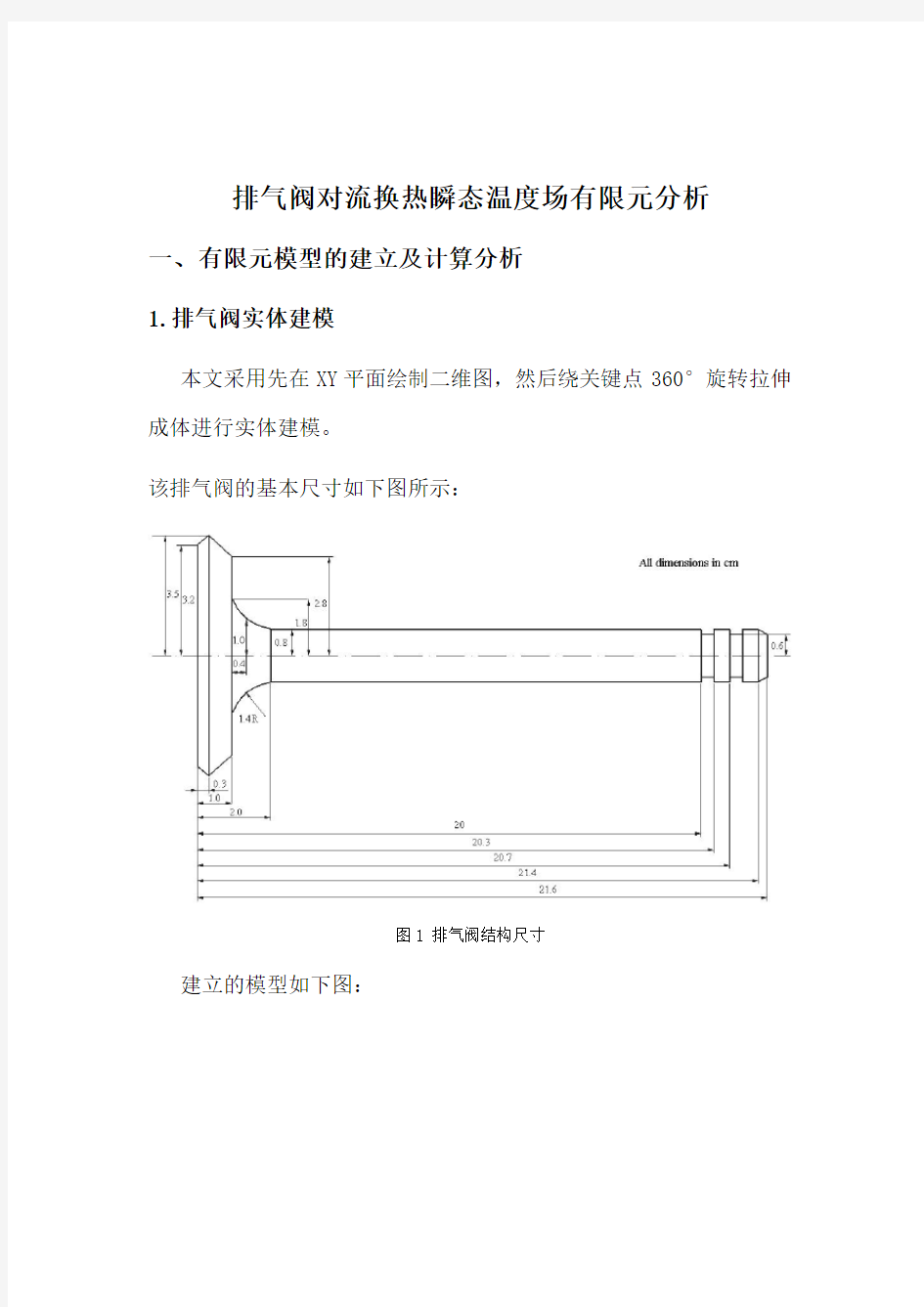
本文采用先在XY平面绘制二维图,然后绕关键点360°旋转拉伸成体进行实体建模。
该排气阀的基本尺寸如下图所示:
图1 排气阀结构尺寸
建立的模型如下图:
图2 排气阀模型
2.排气阀瞬态温度场分析
排气阀实体模型建立好之后,在给定的载荷条件下,分析温度的分布。其分析步骤如下:
(1)网格划分
定义单元类型为热单元:Quadratic SOLID70。
定义材料属性:排气阀选择奥氏体钢4Cr14Ni14W2Mo,其热力学参数参考论文《排气阀热边界条件分析及温度场有限元计算》中提供试验数据(依据《GBT4338-2006金属材料高温拉伸试验方法》进行气阀材料的高温拉伸试验),即排气阀在高温下的弹性模量及热胀系数等参数,以便更好的反映气阀的实际性能。
采用So1id70单元,对模型内燃机排气阀建立有限元模型进行热分析,采用Hex网格划分方法,整体平均分成10等份。指定单元大小,生成网格,共15360个单元,如下图所示。
图3 有限元计算模型
(2)参数设定
试验获得的排气阀材料不同温度下弹性模量及热胀系数变化如下表所示。
表1 不同温度下的弹性模量
温度/℃20 100 200 300 400 500 600 700 800 222.97 208.65 203.41 192.70 171.56 132.84 88.01 45.36 27.79 弹性模
量/GPa
泊松比:μ=0.3
表2 不同温度区间内平均线膨胀系数
(3)施加载荷和求解
本文分析的排气阀四个基本区域受到的对流温度载荷为阶跃式曲线,设定为瞬态热分析,对四个基本区域按各自的对流换热系数施加对流温度载荷,分为四个载荷步,施加时间均为0.2s,各分为10步进行求解。
基于文中排气阀有限元模型和热边界条件,进行计算分析,可获得排气阀温度场分布情况。沿对称位置(喷嘴与排气阀中心连线)剖开模型,得1 /2排气阀与温度场分布,如下图所示。
图4 排气阀温度场分布
图5 排气阀温度场分布剖面图
3.计算模型后处理
针对排气阀温度场分布,拾取节点进行后处理,绘制温度随时间变化的曲线,如下图所示。
图6 节点的温度变化曲线
二、结论
(1)本文针对排气阀特征部位的复杂受热状态进行了分析,通过对内燃机一个工作周期内压缩、燃烧、膨胀等过程的计算获得了排气阀的基本热边界条件,为排气阀温度场计算研究提供了理论基础。
(2)获得了排气阀整体温度场分布状况,共两处热度中心,一处位于阀盘中心略靠近喷嘴一侧,最高温度达450℃,由燃烧过程中高温
燃气造成;另一处为气阀头和气阀杆的过渡颈部,沿过渡区温度先逐步升高,然后降低,最高温度出现于圆弧半径的中间位置附近,其值为447℃,是由高温废气冲刷造成的热集中,而最低温度为4060℃,出现在气门杆处。
(3)沿喷嘴与阀盘中心连接线方向上,排气阀盘面温度的分布是不均匀的,靠近气缸套一侧温度较低,而靠近喷油嘴一侧温度较高,阀盘周向边缘温度差较大,会发生局部过热的危险,采用旋转气门等方式能改善气门的受热状态。
(4)通过对排气阀热负荷的分析计算,采用ANSYS对气门工作温度场进行有限元分析,能够了解气门的温度分布趋势及热均匀程度,为进一步确定其可靠性和寿命提供依据,同时也为热负荷状况的改善提供解决方案,具有一定的实用价值。
(5)本文所选取的研究方法,包括边界条件的选取、计算和处理,具有较好的通用性,具有一定的指导意义。
三、命令流
!实体建模
/PREP7
K,1,0,0,, !设置关键点
K,2,0,0.032,,
K,3,0.003,0.035,,
K,4,0.003,0,,
K,5,0.01,0.028,,
K,6,0.01,0.018,,
K,7,0.02,0.008,,
K,8,0.02,0,,
K,9,0.014,0.01,,
K,10,0.01,0,,
LARC,6, 7, 9 !画圆弧
LSTR,7,8 !通过关键点画直线
LSTR,8,10
LSTR,10,6
FLST,2,4,3 !通过关键点画面
FITEM,2,1
FITEM,2,2
FITEM,2,3
FITEM,2,4
A,P51X
FLST,2,4,3
FITEM,2,4
FITEM,2,10
FITEM,2,5
FITEM,2,3
A,P51X
FLST,2,4,4
FITEM,2,4
FITEM,2,1
FITEM,2,2
FITEM,2,3
AL,P51X
BLC4,0.02,0,0.05,0.008 !通过端点及长和宽尺寸创建矩形面BLC4,0.07,0,0.13,0.008
BLC4,0.2,0,0.003,0.006 !尾部建模
BLC4,0.203,0,0.004,0.008
BLC4,0.207,0,0.003,0.006
BLC4,0.21,0,0.004,0.008
K,35,0.216,0.006,,
K,36,0.216,0,,
FLST,2,4,3
FITEM,2,33
FITEM,2,35
FITEM,2,36
FITEM,2,32
A,P51X
APLOT !查看整体面
K,37,-0.01,0,, !设置关键点成旋转轴
K,38,0.217,0,,
APLOT
FLST,2,10,5,ORDE,2
FITEM,2,1
FITEM,2,-10
FLST,8,2,3
FITEM,8,37
FITEM,8,38
VROTAT,P51X, , , , , ,P51X, ,360,4, !旋转拉伸成体
!划分网格
/COM, Thermal !分析模型为热分析
ET,1,SOLID70 !单元类型为solid70
ESIZE,0,8, !平均分成8等份,进行hex全局网格划分
MSHAPE,0,3D
MSHKEY,1
VMESH,ALL
MPTEMP,1,0 !定义材料参数
MPDATA,KXX,1,,70
MPTEMP,1,0
MPDATA,C,1,,460
MPTEMP,1,0
MPDATA,DENS,1,,7850
!加载与求解
/SOL
ANTYPE,4 !设定为瞬态热分析
TRNOPT,FULL
LUMPM,0
TUNIF,400, !定义初始温度为400
TIME,0.2 !定义载荷时间为0.2s
AUTOTS,1
DELTIM,0.02, , ,1
KBC,0
TSRES,ERASE
TIME,0.2
AUTOTS,1
NSUBST,10, , ,1
KBC,0
TSRES,ERASE
FLST,2,4,5,ORDE,4
FITEM,2,11
FITEM,2,49
FITEM,2,87
FITEM,2,125
/GO
SFA,P51X,1,CONV,472.95,900
FLST,2,16,5,ORDE,16
FITEM,2,12
FITEM,2,15
FITEM,2,-16
FITEM,2,19
FITEM,2,50
FITEM,2,53
FITEM,2,-54
FITEM,2,57
FITEM,2,88
FITEM,2,91
FITEM,2,-92
FITEM,2,95
FITEM,2,126
FITEM,2,128
FITEM,2,-129
FITEM,2,131
/GO
SFA,P51X,1,CONV,1254.5,900
FLST,2,4,5,ORDE,4
FITEM,2,23
FITEM,2,61
FITEM,2,99
FITEM,2,134
/GO
SFA,P51X,1,CONV,460,900
LSWRITE,1, !写入载荷步1
TIME,0.4 !定义载荷终止时间为0.4s AUTOTS,1
DELTIM,0.02, , ,1
KBC,0
TSRES,ERASE
TIME,0.4
AUTOTS,1
NSUBST,10, , ,1
KBC,0
TSRES,ERASE
FLST,2,4,5,ORDE,4
FITEM,2,11
FITEM,2,49
FITEM,2,87
FITEM,2,125
/GO
SFA,P51X,1,CONV,472.95,700
FLST,2,16,5,ORDE,16
FITEM,2,12
FITEM,2,15
FITEM,2,-16
FITEM,2,19
FITEM,2,50
FITEM,2,53
FITEM,2,-54
FITEM,2,57
FITEM,2,88
FITEM,2,91
FITEM,2,-92
FITEM,2,95
FITEM,2,126
FITEM,2,128
FITEM,2,-129
FITEM,2,131
/GO
SFA,P51X,1,CONV,1254.5,700
FLST,2,4,5,ORDE,4
FITEM,2,23
FITEM,2,99
FITEM,2,134
/GO
SFA,P51X,1,CONV,460,700
LSWRITE,2, !写入载荷步2 TIME,0.6
AUTOTS,1
DELTIM,0.02, , ,1
KBC,0
TSRES,ERASE
TIME,0.6
AUTOTS,1
NSUBST,10, , ,1
KBC,0
TSRES,ERASE
FLST,2,4,5,ORDE,4
FITEM,2,11
FITEM,2,49
FITEM,2,87
FITEM,2,125
/GO
SFA,P51X,1,CONV,472.95,500
FLST,2,16,5,ORDE,16
FITEM,2,12
FITEM,2,15
FITEM,2,-16
FITEM,2,19
FITEM,2,50
FITEM,2,53
FITEM,2,-54
FITEM,2,57
FITEM,2,88
FITEM,2,91
FITEM,2,-92
FITEM,2,95
FITEM,2,126
FITEM,2,128
FITEM,2,131
/GO
SFA,P51X,1,CONV,1254.5,500
FLST,2,4,5,ORDE,4
FITEM,2,23
FITEM,2,61
FITEM,2,99
FITEM,2,134
/GO
SFA,P51X,1,CONV,460,500
LSWRITE,3, !写入载荷步3 TIME,0.8
AUTOTS,1
DELTIM,0.02, , ,1
KBC,0
TSRES,ERASE
TIME,0.8
AUTOTS,1
NSUBST,10, , ,1
KBC,0
TSRES,ERASE
FLST,2,4,5,ORDE,4
FITEM,2,11
FITEM,2,49
FITEM,2,87
FITEM,2,125
/GO
SFA,P51X,1,CONV,472.95,400
FLST,2,16,5,ORDE,16
FITEM,2,12
FITEM,2,15
FITEM,2,-16
FITEM,2,19
FITEM,2,50
FITEM,2,53
FITEM,2,-54
FITEM,2,57
FITEM,2,91
FITEM,2,-92
FITEM,2,95
FITEM,2,126
FITEM,2,128
FITEM,2,-129
FITEM,2,131
/GO
SFA,P51X,1,CONV,1254.5,400
FLST,2,4,5,ORDE,4
FITEM,2,23
FITEM,2,61
FITEM,2,99
FITEM,2,134
/GO
SFA,P51X,1,CONV,460,400
LSWRITE,4, !写入载荷步4
OUTRES,ALL,ALL, !求解每一步
LSSOLVE,1,4,1, !求解1-4载荷步
FINISH
/POST1
/EFACET,1
PLNSOL, TEMP,, 0 !查看温度场分布
!进入后处理
/POST26
NUMVAR,200
FILLDATA,191,,,,1,1
REALVAR,191,191
NSOL,3,15052,TEMP,, TEMP_3 !选取node15052,查看其温度变化
STORE,MERGE
XVAR,1
PLVAR,3,
FINISH
姓名:学号:班级:
有限元分析及应用作业报告 一、问题描述 图示无限长刚性地基上的三角形大坝,受齐顶的水压力作用,试用三节点常应变单元和六节点三角形单元对坝体进行有限元分析,并对以下几种计算方案进行比较: 1)分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算; 2)分别采用不同数量的三节点常应变单元计算; 3)当选常应变三角单元时,分别采用不同划分方案计算。
二、几何建模与分析 图1-2力学模型 由于大坝长度>>横截面尺寸,且横截面沿长度方向保持不变,因此可将大坝看作无限长的实体模型,满足平面应变问题的几何条件;对截面进行受力分析,作用于大坝上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力,满足平面应变问题的载荷条件。因此该问题属于平面应变问题,大坝所受的载荷为面载荷,分布情况及方向如图1-2所示,建立几何模型,进行求解。 假设大坝的材料为钢,则其材料参数:弹性模量E=2.1e11,泊松比σ=0.3 三、第1问的有限元建模 本题将分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算。 1)设置计算类型:两者因几何条件和载荷条件均满足平面应变问题,故均取Preferences为Structural 2)选择单元类型:三节点常应变单元选择的类型是PLANE42(Quad 4node42),该单元属于是四节点单元类型,在网格划分时可以对节点数目控制使其蜕化为三节点单元;六节点三角形单元选择的类型是PLANE183(Quad 8node183),该单元属于是八节点单元类型,在网格划分时可以对节点数目控制使其蜕化为六节点单元。因研究的问题为平面应变问题,故对Element behavior(K3)设置为plane strain。 3)定义材料参数 4)生成几何模 a. 生成特征点 b.生成坝体截面 5)网格化分:划分网格时,拾取所有线段设定input NDIV 为10,选择网格划分方式为Tri+Mapped,最后得到200个单元。 6)模型施加约束: 约束采用的是对底面BC全约束。 大坝所受载荷形式为Pressure,作用在AB面上,分析时施加在L AB上,方向水平向右,载荷大小沿L AB由小到大均匀分布(见图1-2)。以B为坐标原点,BA方向为纵轴y,则沿着y方向的受力大小可表示为: ρ(1) = gh P- =ρ g = - 10 {* } 98000 98000 (Y ) y
??????? ????? ???グ?? ? ??? ????φ??? ????φ??? ????φ??? ??? 1 Corresponding author: zzq_890709@https://www.doczj.com/doc/de11395565.html,
?? Contents 0 ????????????? (2) 0.1 ?????? (2) 0.2 ????????? (2) 0.3 ?????? (3) 1????????仈 (4) 1.1 ???? (4) 1.2 ?????????????? (5) 1.3 ???? (7) 1.4 ???????ウ (13) 2 ???????????仈 (14) 2.1 ???? (14) 2.2 ???? (15) 2.3 ???? (16) 3 й???????????仈 (19) 3.1 ??????? (19) 3.2 ?????????????? (19) 3.3 ???? (20) 3.4 ???????ウ (22) 4 ??????????仈 (23) 4.1 ???? (23) 4.2 ???? (24) 4.3 ???? (25) 5 ??????????????仈 (32) 5.1 ???? (32) 5.2 ???? (33) 6 ???仈 (39) 6.1 ???? (39) 6.2 ??傼? (41) 6.3 ???? (44) 6.4 ???? (45) 7 ?? (48)
0 ????????????? 0.1 ?????? ????????????????лй??僔? 1????——?????????????Gambit. 2??????——????Matlab??????? 3????——??Matlab??.dat?????Tecplot??? 0.2 ????????? ?0 Matlab????????? ?????bandwidth.m ????????? elem_B_plane.m ????????B elem_D_plane.m ??????D elem_MK_plane.m ????????K elem_stressIntp.m ??儈??????? input.m ?????? input_readload.m ???? integrate_gauss_1.m 1?儈??? integrate_gauss_2.m 2?儈??? integrate_hammer.m й??Hammer?? main_AssemSolve.m ???????????Ka = P main_CalStress.m ?????????? output2tec.m ??.dat???Tecplot?? plot_mesh.m ?Matlab????? plot_stress.m ?Matlab??????? shape_cubic_820.m 3?8?20??Serendipity??????shape_lagrange.m 1?Lagrange???? shape_quadrangle_9.m ???9???????? shape_quadrangle_48.m ???4?8??Serendipity??????shape_triangle_36.m й??3?6????????
本科有限元习题参考答案
2015年3月10日作业 1、简述力学课程中介绍的各种力学模型的简化条件、基本假设和适用范围(包括有拉压杆模型、弯曲梁模型、平面应力和平面应变模型、轴对称模型、板模型、壳模型等) 2、给出弹性力学问题中平衡方程、几何方程、物理方程的表达式及其意义。 (1)平衡方程:
zy yz xz zx yx xy z yz xz z y xy zy y x zx yx x f y x z f x z y f z y x ττττττττσττσττσ====+??+??+??=+??+??+??=+??+??+??,000, 物理意义:应力分量与体力分量之间的关系。 (2)几何方程: z u x w y w z v x v y u z w y v x u zx yz xy z y x ??+??=??+??=??+??=??=??=??=γγγεεε,,,, 物理意义:应变分量与位移分量之间的关系。 (3)物理方程: [] [] [] zx zx yz yz xy xy y x z z z x y y z y x x G G G E E E τγτγτγσσμσεσσμσεσσμσε1,1,1) (1 ) (1 )(1 ===+-=+-=+-= 物理意义:应变分量与应力分量之间的关系。 3、简述最小势能原理的主要内容和主要公式。 根据虚功原理得到:??=-Γ T Ω T T 0Td Γδu d Ω)F δu -σδε(,由 )(21εδσεδδεU T T =?? ? ??=则0)21((=Γ-Ω-=∏??ΩΓ)Td u d F u T T T p σεδδ 其中,??ΩΓ Γ-Ω-=∏Td u d F u T T T p )21 (σε即为系统的总势能,它是弹性体变 形势能和外力势能之和。上面变分为零式表明:在所有区域内满足几何关系,在边界上满足给定位移条件的可能位移中,真实位移使系统的总势能取驻值(可证
1.1有限单元法中“离散”的含义是什么?有限单元法是如何将具有无限自由度的连续介质问题转变成有限自由度问题的?位移有限元法的标准化程式是怎样的? (1)离散的含义即将结构离散化,即用假想的线或面将连续体分割成数目有限的单元,并在其上设定有限个节点;用这些单元组成的单元集合体代替原来的连续体,而场函数的节点值将成为问题的基本未知量。 (2)给每个单元选择合适的位移函数或称位移模式来近似地表示单元内位移分布规律,即通过插值以单元节点位移表示单元内任意点的位移。因节点位移个数是有限的,故无限自由度问题被转变成了有限自由度问题。 (3)有限元法的标准化程式:结构或区域离散,单元分析,整体分析,数值求解。 1.3单元刚度矩阵和整体刚度矩阵各有哪些性质?各自的物理意义是什么?两者有何区别? 单元刚度矩阵的性质:对称性、奇异性(单元刚度矩阵的行列式为零)。 整体刚度矩阵的性质:对称性、奇异性、稀疏性。 单元Kij物理意义Kij即单元节点位移向量中第j个自由度发生单位位移而其他位移分量为零时,在第j个自由度方向引起的节点力。 整体刚度矩阵K中每一列元素的物理意义是:要迫使结构的某节点位移自由度发生单位位移,而其他节点位移都保持为零的变形状态,在所有个节点上需要施加的节点荷载。 2.2什么叫应变能?什么叫外力势能?试叙述势能变分原理和最小势能原理,并回答下述问题:势能变分原理代表什么控制方程和边界条件?其中附加了哪些条件? (1)在外力作用下,物体内部将产生应力ζ和应变ε,外力所做的功将以变形能的形式储存起来,这种能量称为应变能。 (2)外力势能就是外力功的负值。 (3)势能变分原理可叙述如下:在所有满足边界条件的协调位移中,那些满足静力平衡条件的位移使物体势能泛函取驻值,即势能的变分为零 δΠp=δUε+δV=0 此即变分方程。对于线性弹性体,势能取最小值,即 δ2ΠP=δ2Uε+δ2V≧0 此时的势能变分原理就是著名的最小势能原理。 势能变分原理代表平衡方程、本构方程和应力边界条件,其中附加了几何方程和位移边界条件。 2.3什么是强形式?什么是弱形式?两者有何区别?建立弱形式的关键步骤是什么? 等效积分形式通过分部积分,称式 ∫ΩC T(v)D(u)dΩ+∫ΓE T(v)F(u)dΓ为微分方程的弱形式,相对而言,定解问题的微分方程称为强形式。 区别:弱形式得不到解析解。 建立弱形式的关键步骤:对场函数要求较低阶的连续性。 2.4为了使计算结果能够收敛于精确解,位移函数需要满足哪些条件?为什么? 只要位移函数满足两个基本要求,即完备性和协调性,计算结果便收敛于精确解。 2.6为什么采用变分法求解通常只能得到近似解?变分法的应用常遇到什么困难?Ritz法收敛的条件是什么? (1)在Ritz 法中,N决定了试探函数的基本形态,待定参数使得场函数具有一定的任意性。如果真实场函数包含在试探函数之内,则变分法得到的解答是精确的;如果试探函数取自完全的函数序列,则当项数不断增加时,近似解将趋近于精确解。然而,通常情况下试探函数不会将真实场函数完全包含在内,实际计算时也不可能取无穷多项。因此,试探函数只能是真实场函数的近似。可见,变分法就是在某个假定的范围内找出最佳解答,近似性就源于此。 (2)采用变分法近似求解,要求在整个求解区域内预先给出满足边界条件的场函数。通常情况下这是不可能的,因而变分法的应用受到了限制。 (3)Ritz 法的收敛条件是要求试探函数具有完备性和连续性,也就是说,如果试探函数满足完备性和连续性的要求,当试探函数的项数趋近于无穷时,则Ritz 法的近似解将趋近于数学微分方程的精确解。 3.1构造单元形函数有哪些基本原则?形函数是定义于单元内坐标的连续函数。单元位移函数通常采用多项式,其中的待定常数应该与单元节点自由度数相等。为满足完备性要求,位移函数中必须包括常函数和一次式,即完全一次多项式。多项式的选取应由低阶到高阶,尽量选择完全多项式以提高单元的精度。若由于项数限制而不能选取完全多项式时,也应使完全多项式具有坐标的对称性,并且一个坐标方向的次数不应超过完全多项式的次数。有时为了使位移函数保持一定阶次的完全多项式,可在单元内部配置节点。然而,这种节点的存在将增加有限元格式和计算上的复杂性,除非不得已才加以采用。形函数应保证用它定义的位移函数满足收敛要求,即满足完备性要求和协调性条件。 3.1构造单元形函数有哪些基本原则?试采用构造单元的几何方法,构造T10 单元的形函数,并对其收敛性进行讨论。 通常单元位移函数采用多项式,其中的待定常数由节点位移参数确定,因此其个数应与单元节点自由度数相等。根据实体结构的几何方程,单元的应变是位移的一次导数。为了反映单元刚体位移和常应变即满足完备性要求,位移函数中必须包含常数项和一次项,即完全一次多项式。 3.3何谓面积坐标?其特点是什么?为什么称其为自然坐标或局部坐标? (1)三角形单元中,任一点P(x,y)与其3个角点相连形成3个子三角形,其位置可以用下述称为面积坐标的三个比值来确定: L1=A1/A L2=A2/A L3=A3/A 其中A1,A2,A3分别为P23,P31,P12的面积。 (2)面积坐标的特点: a T3单元的形函数Ni就是面积坐标Li b面积坐标与三角形在整体坐标系中的位置无关。 c三个节点的面积坐标分别为节点1(1, 0, 0)、节点2(0, 1, 0)、节点3(0, 0, 1),形心的面积坐标为(1/3, 1/3, 1/3)。 d单元边界方程为Li=0(i=1,2,3) e在平行于23边的一条直线上,所有点都有相同的面积坐标L1(L1对应的三角形具有相同的高和底边),而且L1就等于此直线至23边的距离与节点1至23边的距离之比值。
Finite element analysis system development present situation and forecast Along with modern science and technology development, the people unceasingly are making the faster transportation vehicle, the large-scale building, the greater span bridge, the high efficiency power set and the preciser mechanical device. All these request engineer to be able precisely to forecast in the design stage the product and the project technical performance, needs to be static, technical parameter and so on dynamic strength to the structure as well as temperature field, flow field, electromagnetic field and transfusion carries on the analysis computation. For example analysis computation high-rise construction and great span bridge when earthquake receives the influence, has a look whether can have the destructive accident; The analysis calculates the nuclear reactor the temperature field, the determination heat transfer and the cooling system are whether reasonable; Analyzes in the new leaf blade the hydrodynamics parameter, enhances its operating efficiency. The sell may sum up as the solution physics question control partial differential equations often is not impossible. In recent years the finite element analysis which develops in the computer technology and under the numerical analysis method support(FEA, Finite Element Analysis) the side principle for solves these complex project analysis estimation problems to provide the effective way. Our country in " 95 " Plan period vigorously promotes the CAD technology, mechanical profession large and middle scalene terries CAD popular rate from " 85 " End 20% enhances that present 70%.With enterprise application of CAD, engineering and technical personnel has gradually get rid drawing board, and will join the main energy how to optimize the design, engineering and improving the quality of products, computer-aided engineering analysis (CAE. Computer Aided Engineering) method and software will be the key technical elements . ln engineering practice, finite element analysis software and CAD system integration design standards should be a qualitative leap, mainly in the following aspects : The increase design function, reduces the design cost; Reduces design and the analysis cycle period; Increase product and project reliability; Uses the optimized design, reduces the material the consumption or the cost;
1.1 有限单元法中“离散”的含义是什么?有限单元法是如何将具有无限自由度的连续介质问题转变成有限自由度问题的?位移有限元法的标准化程式是怎样的? (1)离散的含义即将结构离散化,即用假想的线或面将连续体分割成数目有限的单元,并在其上设定有限个节点;用这些单元组成的单元集合体代替原来的连续体,而场函数的节点值将成为问题的基本未知量。 (2)给每个单元选择合适的位移函数或称位移模式来近似地表示单元内位移分布规律,即通过插值以单元节点位移表示单元内任意点的位移。因节点位移个数是有限的,故无限自由度问题被转变成了有限自由度问题。 (3)有限元法的标准化程式:结构或区域离散,单元分析,整体分析,数值求解。 1.3 单元刚度矩阵和整体刚度矩阵各有哪些性质?各自的物理意义是什么?两者有何区别?单元刚度矩阵的性质:对称性、奇异性(单元刚度矩阵的行列式为零)。整体刚度矩阵的性质:对称性、奇异性、稀疏性。单元 Kij 物理意义 Kij 即单元节点位移向量中第 j 个自由度发生单位位移而其他位移分量为零时,在第 j 个自由度方向引起的节点力。整体刚度矩阵 K 中每一列元素的物理意义是:要迫使结构的某节点位移自由度发生单位位移,而其他节点位移都保持为零的变形状态,在所有个节点上需要施加的节点荷载。 2.2 什么叫应变能?什么叫外力势能?试叙述势能变分原理和最小势能原理,并回答下述问题:势能变分原理代表什么控制方程和边界条件?其中附加了哪些条件? (1)在外力作用下,物体内部将产生应力σ和应变ε,外力所做的功将以变形能的形式储存起来,这种能量称为应变能。 (2)外力势能就是外力功的负值。 (3)势能变分原理可叙述如下:在所有满足边界条件的协调位移中,那些满足静力平衡条件的位移使物体势能泛函取驻值,即势能的变分为零 δ∏p=δ Uε+δV=0 此即变分方程。对于线性弹性体,势能取最小值,即 δ2∏P=δ2Uε+δ2V≥0 此时的势能变分原理就是著名的最小势能原理。 势能变分原理代表平衡方程、本构方程和应力边界条件,其中附加了几何方程和位移边界条件。 2.3 什么是强形式?什么是弱形式?两者有何区别?建立弱形式的关键步骤是什么? 等效积分形式通过分部积分,称式 ∫ΩCT(v)D(u)dΩ+∫ΓET(v)F(u)dΓ 为微分方程的弱形式,相对而言,定解问题的微分方程称为强形式。 区别:弱形式得不到解析解。建立弱形式的关键步骤:对场函数要求较低阶的连续性。2.4 为了使计算结果能够收敛于精确解,位移函数需要满足哪些条件?为什么? 只要位移函数满足两个基本要求,即完备性和协调性,计算结果便收敛于精确解。 2.6 为什么采用变分法求解通常只能得到近似解?变分法的应用常遇到什么困难?Ritz 法收敛的条件是什么? (1)在 Ritz 法中,N 决定了试探函数的基本形态,待定参数使得场函数具有一定的任意性。如果真实场函数包含在试探函数之内,则变分法得到的解答是精确的;如果试探函数取自完全的函数序列,则当项数不断增加时,近似解将趋近于精确解。然而,通常情况下试探函数不会将真实场函数完全包含在内,实际计算时也不可能取无穷多项。因此,试探函数只能是真实场函数的近似。可见,变分法就是在某个假定的范围内找出最佳解答,近似性就源于此。 (2)采用变分法近似求解,要求在整个求解区域内预先给出满足边界条件的场函数。通常情况下这是不可能的,因而变分法的应用受到了限制。 (3)Ritz 法的收敛条件是要求试探函数具有完备性和连续性,也就是说,如果试探函数满足完备性和连续性的要求,当试探函数的项数趋近于无穷时,则 Ritz 法的近似解将趋近于数学微分方程的精确解。 3.1 构造单元形函数有哪些基本原则? 形函数是定义于单元内坐标的连续函数。单元位移函数通常采用多项式,其中的待定常数应该与单元节点自由度数相等。为满足完备性要求,位移函数中必须包括常函数和一次式,即完全一次多项式。多项式的选取应由低阶到高阶,尽量选择完全多项式以提高单元的精度。若由于项数限制而不能选取完全多项式时,也应使完全多项式具有坐标的对称性,并且一
有限元分析软件的比较(购买必看)-转贴 随着现代科学技术的发展,人们正在不断建造更为快速的交通工具、更大规模的建筑物、更大跨度的桥梁、更大功率的发电机组和更为精密的机械设备。这一切都要求工程师在设计阶段就能精确地预测出产品和工程的技术性能,需要对结构的静、动力强度以及温度场、流场、电磁场和渗流等技术参数进行分析计算。例如分析计算高层建筑和大跨度桥梁在地震时所受到的影响,看看是否会发生破坏性事故;分析计算核反应堆的温度场,确定传热和冷却系统是否合理;分析涡轮机叶片内的流体动力学参数,以提高其运转效率。这些都可归结为求解物理问题的控制偏微分方程式,这些问题的解析计算往往是不现实的。近年来在计算机技术和数值分析方法支持下发展起来的有限元分析(FEA,Finite Element A nalysis)方法则为解决这些复杂的工程分析计算问题提供了有效的途径。在工程实践中,有限元分析软件与CAD系统的集成应用使设计水平发生了质的飞跃,主要表现在以下几个方面: 增加设计功能,减少设计成本; 缩短设计和分析的循环周期; 增加产品和工程的可靠性; 采用优化设计,降低材料的消耗或成本; 在产品制造或工程施工前预先发现潜在的问题; 模拟各种试验方案,减少试验时间和经费; 进行机械事故分析,查找事故原因。 在大力推广CAD技术的今天,从自行车到航天飞机,所有的设计制造都离不开有限元分析计算,FEA在工程设计和分析中将得到越来越广泛的重视。国际上早20世纪在50年代末、60年代初就投入大量的人力和物力开发具有强大功能的有限元分析程序。其中最为著名的是由美国国家宇航局(NASA)在1965年委托美国计算科学公司和贝尔航空系统公司开发的NASTRAN有限元分析系统。该系统发展至今已有几十个版本,是目前世界上规模最大、功能最强的有限元分析系统。从那时到现在,世界各地的研究机构和大学也发展了一批规模较小但使用灵活、价格较低的专用或通用有限元分析软件,主要有德国的ASKA、英国的PA FEC、法国的SYSTUS、美国的ABQUS、ADINA、ANSYS、BERSAFE、BOSOR、COSMOS、ELAS、MARC和STARDYNE等公司的产品。 以下对一些常用的软件进行一些比较分析: 1. LSTC公司的LS-DYNA系列软件
有限元分析》大作业基本要求: 1.以小组为单位完成有限元分析计算,并将计算结果上交; 2.以小组为单位撰写计算分析报告; 3.按下列模板格式完成分析报告; 4.计算结果要求提交电子版,一个算例对应一个文件夹,报告要求提交电子版和纸质版。 有限元分析》大作业 小组成 员: 储成峰李凡张晓东朱臻极高彬月 Job name :banshou 完成日 期: 2016-11-22 一、问题描述 (要求:应结合图对问题进行详细描述,同时应清楚阐述所研究问题的受力状况 和约束情况。图应清楚、明晰,且有必要的尺寸数据。)如图所示,为一内六角螺栓扳手,其轴线形状和尺寸如图,横截面为一外 接圆半径为0.01m的正六边形,拧紧力F为600N,计算扳手拧紧时的应力分布 图1 扳手的几何结构 数学模型
要求:针对问题描述给出相应的数学模型,应包含示意图,示意图中应有必要的尺寸数据;
图 2 数学模型 如图二所示,扳手结构简单,直接按其结构进行有限元分析。 三、有限元建模 3.1 单元选择 要求:给出单元类型, 并结合图对单元类型进行必要阐述, 包括节点、自由度、 实常数等。) 图 3 单元类型 如进行了简化等处理,此处还应给出文字说
扳手截面为六边形,采用4 节点182单元,182 单元可用来对固体结构进行
二维建模。182单元可以当作一个平面单元,或者一个轴对称单元。它由4 个结点组成,每个结点有2 个自由度,分别在x,y 方向。 扳手为规则三维实体,选择8 节点185单元,它由8 个节点组成,每个节点有3 个自由度,分别在x,y,z 方向。 3.2 实常数 (要求:给出实常数的具体数值,如无需定义实常数,需明确指出对于本问题选择的单元类型,无需定义实常数。) 因为该单元类型无实常数,所以无需定义实常数 3.3材料模型 (要求:指出选择的材料模型,包括必要的参数数据。) 对于三维结构静力学,应力主要满足广义虎克定律,因此对应ANSYS中的线性,弹性,各项同性,弹性模量EX:2e11 Pa, 泊松比PRXY=0.3 3.4几何建模由于扳手结构比较简单,所以可以直接在ANSYS软件上直接建模,在ANSYS建 立正六 边形,再创立直线,面沿线挤出体,得到扳手几何模型 图4 几何建模
1、何为有限元法?其基本思想是什么? 有限元法是一种基于变分法而发展起来的求解微分方程的数值计算方法,该方法以计算机为手段,采用分片近似,进而逼近整体的研究思想求解物理问题。 基本思想是化整为零集零为整。 2、为什么说有限元法是近似的方法,体现在哪里? 有两点:用离散单元的组合体来逼近原始结构,体现了几何上的近似;而用近似函数逼近未知变量在单元内的真实解,体现了数学上的近似。 3、单元、节点的概念? 节点:表达实际结构几何对象之间相互连接方式的概念 单元:网格划分中的每一个小部分称为单元,网格间相互联结点称为节点 4、有限元法分析过程可归纳为几个步骤? 结构离散化、单元分析、整体分析 5、有限元方法分几种?本课程讲授的是哪一种? 位移法、力法、混合法本课程讲授位移法 6、弹性力学的基本变量是什么?何为几何方程、物理方程及虚功方程?弹性矩阵的特点? 弹性力学变量:外力、应力、应变和位移。 描述弹性体应变分量与位移分量之间的方程称为几何方程;物理方程描述应力分量与应变分量之间的关系;弹性体上外力在虚位移发生过程中所做的虚功与储存在弹性体内的需应变能相等。 弹性矩阵由材料的弹性模量和泊松比确定,与坐标位置无关。 7、何为平面应力问题和平面应变问题? 平面应力问题:在结构上满足a几何条件:研究对象是等厚度薄板。b载荷条件:作用于薄板上的载荷平行于板平面且沿厚度方向均匀分布,而在两板面无外力作用。 平面应变问题:满足a几何条件:长柱体,即长度方向的尺寸远远大于横截面的尺寸,且横截面沿长度方向不变。b载荷条件:作用于长柱体结构上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力两条件的弹性力学问题。 1、何为结构的离散化?离散化的目的?何为有限元模型? ①离散化:把连续的结构看成由有限个单元组成的集合体。②目的:建立有限元计算模型③通常把由节点,单元及相应的节点载荷和节点约束构成的模型称为有限元模型2、结构离散化时,划分单元数目的多少以及疏密分布,将直接影响到什么?确定单元数量的原则?通常如何设置节点?
我对有限元方法的认识 1有限元法概念 有限元方法(The Finite Element Method, FEM)是计算机问世以后迅速发展起来的一种分析方法。每一种自然现象的背后都有相应的物理规律,对物理规律的描述可以借助相关的定理或定律表现为各种形式的方程(代数、微分、或积分)。这些方程通常称为控制方程(Governing equation)。 针对实际的工程问题推导这些方程并不十分困难,然而,要获得问题的解析的数学解却很困难。人们多采用数值方法给出近似的满足工程精度要求的解答。 有限元方法就是一种应用十分广泛的数值分析方法。 有限元方法是处理连续介质问题的一种普遍方法,离散化是有限元方法的基础。 这种思想自古有之:古代人们在计算圆的周长或面积时就采用了离散化的逼近方法:即采用内接多边形和外切多边形从两个不同的方向近似描述圆的周长或面积,当多边形的边数逐步增加时近似值将从这两个方向逼近真解。 近年来随着计算机技术的普及和计算速度的不断提高,有限元分析在工程设计和分析中得到了越来越广泛的重视,已经成为解决复杂的工程分析计算问题的有效途径,现在从汽车到航天飞机几乎所有的设计制造都已离不开有限元分析计算,其在机械制造、材料加工、航空航天、汽车、土木建筑、电子电器、国防军工、船舶、铁道、石化、能源、科学研究等各个领域的广泛使用已使设计水平发生了质的飞跃。 国际上早在 60 年代初就开始投入大量的人力和物力开发有限元分析程序。“有限单元”是由Clough R W于1960年首次提出的。但真正的有限元分析软件是诞生于 70 年代初期,随着计算机运算速度的提高,内、外存容量的扩大和图形设备的发展,以及软件技术的进步,发展成为有限元分析与设计软件,但初期其前后处理的能力还是比较弱的,特别是后处理能力更弱。
1、有限元是近似求解一般连续场问题的数值方法 2、有限元法将连续的求解域离散为若干个子域,得到有限个单元,单元和单元之间用节点连接 3、直梁在外力的作用下,横截面的内力有剪力和弯矩两个. 4、平面刚架结构在外力的作用下,横截面上的内力有轴力、剪力、弯矩. 5、进行直梁有限元分析,平面刚架单元上每个节点的节点位移为挠度和转角 6、平面刚架有限元分析,节点位移有轴向位移、横向位移、转角。 7、在弹性和小变形下,节点力和节点位移关系是线性关系。 8、弹性力学问题的方程个数有15个,未知量个数有15个。 9、弹性力学平面问题方程个数有8,未知数8个。 10、几何方程是研究应变和位移之间关系的方程 11、物理方程是描述应力和应变关系的方程 12、平衡方程反映了应力和体力之间关系的 13、把经过物体内任意一点各个截面上的应力状况叫做一点的应力状态 14、9形函数在单元上节点上的值,具有本点为_1_.它点为零的性质,并且在三角形单元的任一节点上,三个行函数之和为_1_ 15、形函数是_三角形_单元内部坐标的_线性_函数,他反映了单元的_位移_状态 16、在进行节点编号时,同一单元的相邻节点的号码差尽量小. 17、三角形单元的位移模式为_线性位移模式_- 18、矩形单元的位移模式为__双线性位移模式_
19、在选择多项式位移模式的阶次时,要求_所选的位移模式应该与局部坐标系的方位无关的性质为几何_各向同性 20、单元刚度矩阵描述了_节点力_和_节点位移之间的关系 21、矩形单元边界上位移是连续变化的 1.诉述有限元法的定义 答: 有限元法是近似求解一般连续场问题的数值方法 2.有限元法的基本思想是什么 答: 首先,将表示结构的连续离散为若干个子域,单元之间通过其边界上的节点连接成组合体。其次,用每个单元内所假设的近似函数分片地表示求解域内待求的未知厂变量。 3.有限元法的分类和基本步骤有哪些 答: 分类: 位移法、力法、混合法;步骤: 结构的离散化,单元分析,单元集成,引入约束条件,求解线性方程组,得出节点位移。 4.有限元法有哪些优缺点 答: 优点:
有限元分析及其应用-2010 思考题: 1、有限元法的基本思想是什么?有限元法的基本步骤有那些?其中“离散”的含义是什 么?是如何将无限自由度问题转化为有限自由度问题的? 答:基本思想:几何离散和分片插值。 基本步骤:结构离散、单元分析和整体分析。 离散的含义:用假想的线或面将连续物体分割成由有限个单元组成的集合,且单元之间仅在节点处连接,单元之间的作用仅由节点传递。当单元趋近无限小,节点无限多,则这种离散结构将趋近于实际的连续结构。 2、有限元法与经典的差分法、里兹法有何区别? 区别:差分法:均匀离散求解域,差分代替微分,要求规则边界,几何形状复杂精度较低; 里兹法:根据描述问题的微分方程和相应的定解构造等价的泛函表达式,求得近似解; 有限元:基于变分法,采用分片近似进而逼近总体的求解微分方程的数值计算方法。 3、一根单位长度重量为q的悬挂直杆,上端固定,下端受垂直向下的外力P,试 1)建立其受拉伸的微分方程及边界条件; 2)构造其泛函形式; 3)基于有限元基本思想和泛函求极值构造其有限元的计算格式(即最小势能原理)。4、以简单实例为对象,分别按虚功原理和变分原理导出有限元法的基本格式(单元刚度矩 阵)。 5、什么是节点力和节点载荷?两者有何区别? 答:节点力:单元与单元之间通过节点相互作用 节点载荷:作用于节点上的外载 6、单元刚度矩阵和整体刚度矩阵各有何特点?其中每个矩阵元素的物理意义是什么(按自 由度和节点解释)? 答:单元刚度矩阵:对称性、奇异性、主对角线恒为正 整体刚度矩阵:对称性、奇异性、主对角线恒为正、稀疏性、带状性。 Kij,表示j节点产生单位位移、其他节点位移为零时作用i节点的力,节点力等于节点位移与单元刚度元素乘积之和。 7、单元的形函数具有什么特点?有哪些性质? 答:形函数的特点:Ni为x,y的坐标函数,与位移函数有相同的阶次。 形函数Ni在i节点的值为1,而在其他节点上的值为0; 单元内任一点的形函数之和恒等于1; 形函数的值在0~1间变化。 8、描述弹性体的基本变量是什么?基本方程有哪些组成? 答:基本变量:外力、应力、应变、位移 基本方程:平衡方程、几何方程、物理方程、几何条件 9、何谓应力、应变、位移的概念?应力与强度是什么关系? 答:应力:lim△Q/△A=S △A→0 应变:物体形状的改变 位移:弹性体内质点位置的变化 10、问题的微分方程提法、等效积分提法和泛函变分提法之间有何关系?何谓“强形 式”?何谓“弱形式”,两者有何区别?建立弱形式的关键步骤是什么?
有限元作业
有限元分析大作业 学院: 班级: 姓名: 学号: 日期:
试题一(对应第二章) 如图所示,有一受轴向拉伸载荷2000P N =作用的变截面杆件,在0x =处,杆件截面积为2020A mm =,在180x L mm ==处,杆件截面积为201102 A mm =,杆件弹性模量为200GPa ,泊松比为0.3,试建立该杆件的有限元模型,并计算端部位移。(在划分网格时,沿长度方向取三个等长度杆单元) x P 0A 012A L 解:计算分析 000()(1)2(1)2(1)2x x x x A P x A A x A L P x A L P x E EA L σσσε===-=-==-
[ ]00 000022()[ln(2)]ln 2ln(2)12x x x x P dx PL PL u x dx L x L L x x EA EA EA L ε===--=--??- ??? ?? 0() 1.3860.1242mm PL u L EA == 数学建模:将其用二维模型进行降维处理,分为四个节点,三个等长度单元。 后处理
读出最大应力:1.750*10^2mpa 则计算得到右端部位移u(L)=0.12683 轴向位移随杆长变化图如下:
试题二(对应第三章) 一正方形平板,尺寸为40 mm×40 mm,厚度为2 mm,板中央有直径为d的圆孔如下图所示,板材弹性模量为200GPa,泊松比为0.3,在板的左端和右端分别施加20 MPa的拉力载荷.试建立该平板的有限元模型,并分别计算圆孔直 d=5,10,15,20和25mm时,平板开孔应力集中系数。
有限元分析 有限元法的基本思想是将结构离散化,用有限个容易分析的单元来表示复杂的对象,单元之间通过有限个节点相互连接,然后根据变形协调条件综合求解。由于单元的数目是有限的,节点的数目也是有限的,所以称为有限元法(FEM,Finite Element Method)。 有限元法是一种求解关于场问题的一系列偏微分方程的数值方法.这种类型的问题会在许多工程学科中遇到,如机械设计、声学、电磁学、岩土力学、断裂力学、流体力学等.在机械工程中,有限元分析被光分应用在结构、振动和传热问题上。 有限元法是60年代以来发展起来的新的数值计算方法,是计算机时代的产物。虽然有限元的概念早在40年代就有人提出,但由于当时计算机尚未出现,它并未受到人们的重视。随着计算机技术的发展,有限元法在各个工程领域中不断得到深入应用,现已遍及宇航工业、核工业、机电、化工、建筑、海洋等工业,是机械产品动、静、热特性分析的重要手段。早在70年代初期就有人给出结论:有限元法在产品结构设计中的应用,使机电产品设计产生革命性的变化,理论设计代替了经验类比设计。目前,有限元法仍在不断发展,理论上不断完善,各种有限元分析程序包的功能越来越强大,使用越来越方便。 大约在300年前,牛顿和莱布尼茨发明了积分法,证明了该运算具有整体对局部的可加性。虽然,积分运算与有限元技术对定义
域的划分是不同的,前者进行无限划分而后者进行有限划分,但积分运算为实现有限元技术准备好了一个理论基础。 在牛顿之后约一百年,著名数学家高斯提出了加权余值法及线性代数方程组的解法。这两项成果的前者被用来将微分方程改写为积分表达式,后者被用来求解有限元法所得出的代数方程组。在18世纪,另一位数学家拉格郎日提出泛函分析。泛函分析是将偏微分方程改写为积分表达式的另一途经。 在19世纪末及20世纪初,数学家瑞雷和里兹首先提出可对全定义域运用展开函数来表达其上的未知函数。1915年,数学家伽辽金提出了选择展开函数中形函数的伽辽金法,该方法被广泛地用于有限元。1943年,数学家库朗德第一次提出了可在定义域内分片地使用展开函数来表达其上的未知函数。这实际上就是有限元的做法。 所以,到这时为止,实现有限元技术的第二个理论基础也已确立。 20世纪50年代,飞机设计师们发现无法用传统的力学方法分析飞机的应力、应变等问题。波音公司的一个技术小组,首先将连续体的机翼离散为三角形板块的集合来进行应力分析,经过一番波折后获得前述的两个离散的成功。20世纪50年代,大型电子计算机投入了解算大型代数方程组的工作,这为实现有限元技术准备好了物质条件。1960年前后,美国的R. W. Clough教授及我国的冯康教授分别独立地在论文中提出了“有限单元”,这样的名词。此后,这样
有限元分析的发展趋势 摘要:1965年“有限元”这个名词第一次出现,到今天有限元在工程上得到广泛应用,经历了三十多年的发展历史,理论和算法都已经日趋完善。有限元的核心思想是结构的离散化,就是将实际结构假想地离散为有限数目的规则单元组合体,实际结构的物理性能可以通过对离散体进行分析,得出满足工程精度的近似结果来替代对实际结构的分析,这样可以解决很多实际工程需要解决而理论分析又无法解决的复杂问题。 关键词:有限元分析结构计算结构设计 Abstract: The 1965 "finite" appeared for the first time this term, and today is widely used finite element in engineering, after more than 30 years of history, theory and algorithms have been improved. Finite element discretization of the core idea is to structure, is the actual structure of the supposed discrete combination unit for a limited number of rules, the actual structure to analyse the physical properties can be felt through a discrete body of drawn precision engineering approximation as an alternative to the analysis of actual structures, this would solve a lot of theoretical analysis and practical engineering needed to address complex problems that cannot be resolved. Key words: finite element analysis structural calculation physical design 1 有限元的发展历程 有限元法的发展历程可以分为提出(1943)、发展(1944一1960)和完善(1961-二十世纪九十年代)三个阶段。有限元法是受内外动力的综合作用而产生的。 1943年,柯朗发表的数学论文《平衡和振动问题的变分解法》和阿格瑞斯在工程学中取得的重大突破标志着有限元法的诞生。 有限元法早期(1944一1960)发展阶段中,得出了有限元法的原始代数表达形式,开始了对单元划分、单元类型选择的研究,并且在解的收敛性研究上取得了很大突破。1960年,克劳夫第一次提出了“有限元法”这个名称,标志着有限元法早期发展阶段的结束。 有限元法完善阶段(1961一二十世纪九十年代)的发展有国外和国内两条线索。在国外的发展表现为: 第一,建立了严格的数学和工程学基础;第二,应用范围扩展到了结构力学以外的领域;第三,收敛性得到了进一步研究,形成了系统的误差估计理论;第四,发展起了相应的商业软件包。 近年来随着计算机技术的普及和计算速度的不断提高,有限元分析在工程设计和分析中得到了越来越广泛的重视,已经成为解决复杂的工程分析计算问题的有效途径,现在从汽车到航天飞机几乎所有的设计制造都已离不开有限元分析计算,其在机械制造、材料加工、航空航天、汽车、土木建筑、电子电器,国防军工,船舶,铁道,石化,能源,科学研究等各个领域的广泛使用已使设计水平发生了质的飞跃,主要表现在以下几个方面: 一、增加产品和工程的可靠性; 二、在产品的设计阶段发现潜在的问题 三、经过分析计算,采用优化设计方案,降低原材料成本