【霍尔传感器的性能测试】
一.测试目的
了解霍尔式传感器的原理及特性。
二.测试器材
霍尔片、磁路系统、电桥、差动放大器、电压表、直流稳压表、测微头。
三.测试步骤
1.设定旋钮初始位置:差动放大器增益旋钮打到最小,电压表置2V档,直流稳压电源置2V档(注意:激励电压必须≤±2V,否则霍尔片易损坏!)。
2.开启电源,将差动放大器调零。方法:用实验线将差放的正负输入端与地端连接在一起,增益设置在最大位置,然后将输出端接到电压表的输入插口,打开主、副电源,调整差放的调零旋钮使表头指示为0。
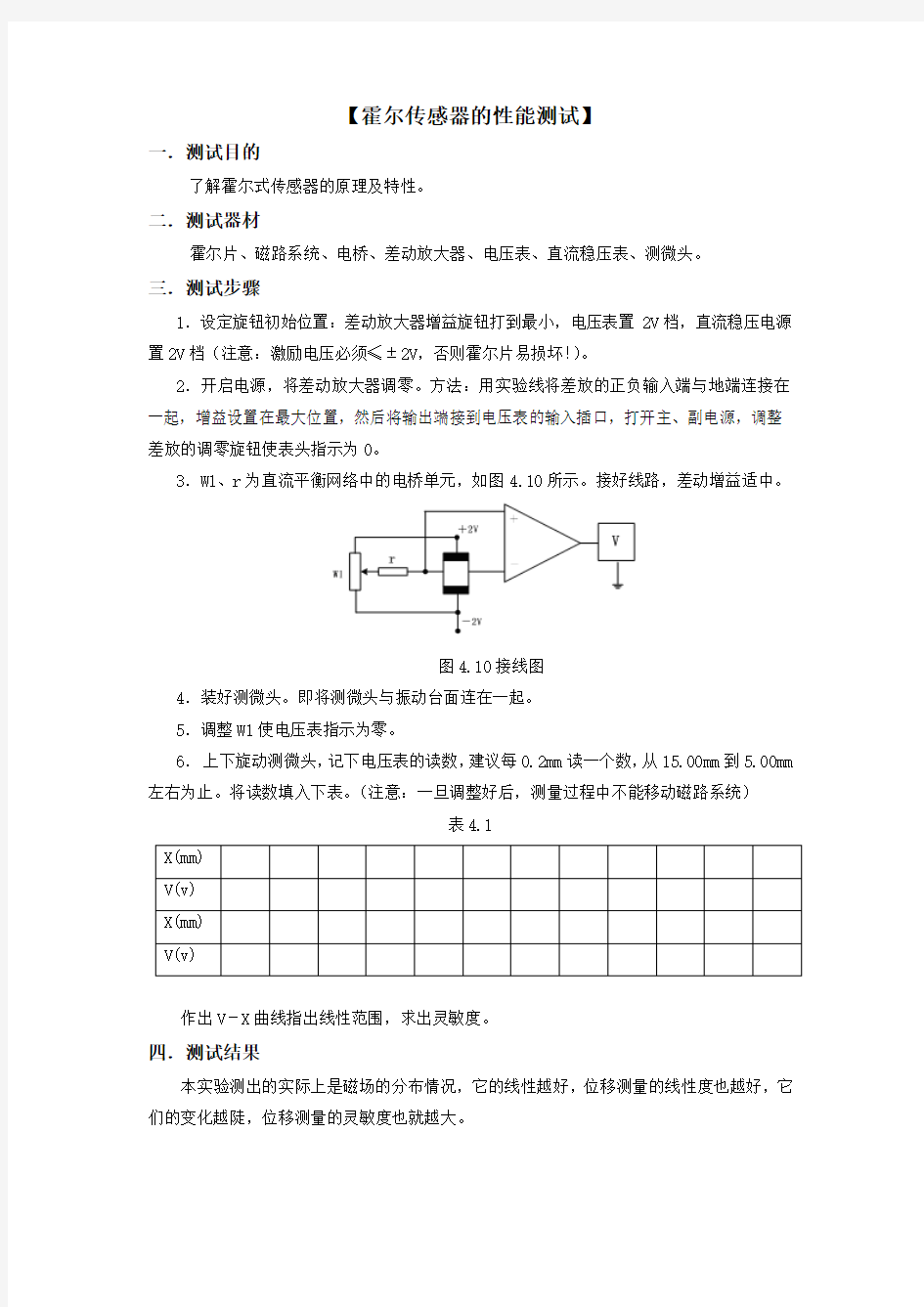
3.W1、r为直流平衡网络中的电桥单元,如图4.10所示。接好线路,差动增益适中。
图4.10接线图
4.装好测微头。即将测微头与振动台面连在一起。
5.调整W1使电压表指示为零。
6.上下旋动测微头,记下电压表的读数,建议每0.2mm读一个数,从15.00mm到5.00mm 左右为止。将读数填入下表。(注意:一旦调整好后,测量过程中不能移动磁路系统)
表4.1
作出V-X曲线指出线性范围,求出灵敏度。
四.测试结果
本实验测出的实际上是磁场的分布情况,它的线性越好,位移测量的线性度也越好,它们的变化越陡,位移测量的灵敏度也就越大。
实验14 直流激励时霍尔传感器位移特性实验 141270046 自动化杨蕾生 一、实验目的: 了解直流激励时霍尔式传感器的特性。 二、基本原理: 根据霍尔效应,霍尔电势U H=K H IB,当霍尔元件处在梯度磁场中运动时,它的电势会发生变化,利用这一性质可以进行位移测量。 三、需用器件与单元: 主机箱、霍尔传感器实验模板、霍尔传感器、测微头、数显单元。 四、实验步骤: 1、霍尔传感器和测微头的安装、使用参阅实验九。按图14示意图接线(实验模板的输出V o1接主机箱电压表Vin),将主机箱上的电压表量程(显示选择)开关打到2V档。 2、检查接线无误后,开启电源,调节测微头使霍尔片大致在磁铁中间位置,再调节Rw1使数显表指示为零。 3、以某个方向调节测微头2mm位移,记录电压表读数作为实验起始点;再反方向调节测微头每增加0.2mm记下一个读数,将读数填入表14。
作出V-X曲线,计算不同线性范围时的灵敏度和非线性误差。 五、实验注意事项: 1、对传感器要轻拿轻放,绝不可掉到地上。 2、不要将霍尔传感器的激励电压错接成±15V,否则将可能烧毁霍尔元件。 六、思考题: 本实验中霍尔元件位移的线性度实际上反映的是什么量的变化? 答:本人认为应该是实际的输入、输出与拟合的理想的直线的偏离程度的变化,当X不同的时候,实际的输出值与根据拟合直线得到的数值的偏离值是不相同的。 七、实验报告要求: 1、整理实验数据,根据所得得实验数据做出传感器的特性曲线。 实验数据如下: 表9-2
(1)由上图可知灵敏度为S=ΔV/ΔX=-0.9354V/mm (2)由上图可得非线性误差: 当x=1mm时, Y=-0.9354×1+1.849=0.9136 Δm =Y-0.89=0.0236V yFS=1.88V δf =Δm /yFS×100%=1.256% 当x=3mm时: Y=-0.9354×3+1.849=-0.9572V Δm =Y-(-0.94)=-0.0172V yFS=1.88V δf =Δm /yFS×100%=0.915% 2、归纳总结霍尔元件的误差主要有哪几种,各自的产生原因是什么,应怎样进 行补偿。 答:(1)零位误差。零位误差由不等位电势所造成,产生不等位电势的主要原因是:两个霍尔电极没有安装在同一等位面上;材料不均匀造成电阻分布不均匀;控制电极接触不良,造成电流分布不均匀。补偿方法是加一不等位电势补偿电路。 (2)温度误差。因为半导体对温度很敏感,因而其霍尔系数、电阻率、霍尔电势的输入、输出电阻等均随温度有明显的变化,导致了霍尔元件产生温度误差。补偿方法是采用恒流源供电和输入回路并联电阻。
传感器原理及应用期末课程设计题目基于霍尔传感器的转速测量电路设计 姓名小波学号8888888888 院(系)电子电气工程学院 班级清华大学——电子信息 指导教师牛人职称博士后 二O一一年七月十二日
摘要:转速是发动机重要的工作参数之一,也是其它参数计算的重要依据。针对工业上常见的发动机设计了以单片机STC89C51为控制核心的转速测量系统。系统利用霍尔传感器作为转速检测元件,并利用设计的调理电路对霍尔转速传感器输出的信号进行滤波和整形,将得到的标准方波信号送给单片机进行处理。实际测试表明,该系统能满足发动机转速测量要求。 关键词:转速测量,霍尔传感器,信号处理,数据处理
Abstract: The rotate speed is one of the important parameters for the engine, and it is also the important factor that calculates other parameters. The rotate speed measurement system for the common engine is designed with the single chip STC89C51. The signal of the rotate speed is sampled by the Hall sensor, and it is transformed into square wave which will be sent to single chip computer. The result of the experiment shows that the measurement system is able to satisfy the requirement of the engine rotate speed measurement. Key words: rotate speed measurement, Hall sensor, signal processing, data processing
成绩评定: 传感器技术 课程设计 题目基于霍尔传感器的转速测量
摘要 转速是发动机重要的工作参数之一,也是其它参数计算的重要依据。针对工业上常见的发动机设计了以单片机STC89C51为控制核心的转速测量系统。系统利用霍尔传感器作为转速检测元件,并利用设计的调理电路对霍尔转速传感器输出的信号进行滤波和整形,将得到的标准方波信号送给单片机进行处理。实际测试表明,该系统能满足发动机转速测量要求。 关键词:转速测量,霍尔传感器,信号处理,数据处理
目录 一、设计目的------------------------- 1 二、设计任务与要求--------------------- 1 2.1设计任务------------------------- 1 2.2设计要求------------------------- 1 三、设计步骤及原理分析 ----------------- 1 3.1设计方法------------------------- 2 3.2设计步骤------------------------- 2 3.3设计原理分析--------------------- 16 四、课程设计小结与体会 ---------------- 16 五、参考文献------------------------- 16
一、设计目的 1.学习基本理论在实践中综合运用的初步禁言,掌握模拟电路的设计的基本方法,设计步骤,培养综合设计与实物调试能力。 2.学会霍尔传感器的设计方法和性能指标测试。 3.进一步了解霍尔传感器的组成框图和各个单元的工作原理以及相互之间的联系。 4.培养实践技能,提高分析和解决问题的能力。 5.提高自己对文献资料的搜索和信息处理能力。 二、设计任务与要求 2.1设计任务 1、查阅传感器有关方面的相关资料,了解此方面的发展状况。 2、掌握所用器件的特性。 3、采用合理的设计方案。 4、设计、实现该系统。 5、撰写设计报告。 2.2设计要求 1.掌握霍尔传感器的使用方法 2.熟悉使用单片机测量转速 三、设计步骤及原理分析 3.1设计方法 系统由传感器、信号预处理电路、处理器、显示器和系统软件等部分组成。传感器部分采用霍尔传感器,负责将电机的转速转化
实验十九开关式霍尔传感器测转速实验 一、实验目的:了解开关式霍尔传感器测转速的应用。 二、基本原理:开关式霍尔传感器是线性霍尔元件的输出信号经放大器放大,再经施密特电路整形成矩形波(开关信号)输出的传感器。开关式霍尔传感器测转速的原理框图19—1所示。当被测圆盘上装上6只磁性体时,圆盘每转一周磁场就变化6次,开关式霍尔传感器就同频率f相应变化输出,再经转速表显示转速n。 图19—1开关式霍尔传感器测转速原理框图 三、需用器件与单元:主机箱中的转速调节0~24V直流稳压电源、+5V直流稳压电源、电压表、频率\转速表;霍尔转速传感器、转动源。 四、实验步骤: 1、根据图19—2将霍尔转速传感器安装于霍尔架上,传感器的端面对准转盘上的磁钢并调节升降杆使传感器端面与磁钢之间的间隙大约为2~3mm。 2、将主机箱中的转速调节电源0~24V旋钮调到最小(逆时针方向转到底)后接入电压表(电压表量程切换开关打到20V档);其它接线按图19—2所示连接(注意霍尔转速传感器的三根引线的序号);将频频\转速表的开关按到转速档。 3、检查接线无误后合上主机箱电源开关,在小于12V范围内(电压表监测)调节主机箱的转速调节电源(调节电压改变直流电机电枢电压),观察电机转动及转速表的显示情况。
图19—2 霍尔转速传感器实验安装、接线示意图 4、从2V开始记录每增加1V相应电机转速的数据(待电机转速比较稳定后读取数据);画出电机的V-n(电机电枢电压与电机转速的关系)特性曲线。实验完毕,关闭电源。 n(转/ 406286108132157179203225250分) V(mv)2003004635006017037999019991104 电机的V-n(电机电枢电压与电机转速的关系)特性曲线 五、思考题: 利用开关式霍尔传感器测转速时被测对象要满足什么条件? 被测物能够阻挡或透过或反射霍尔信号,般都是一个发射头一个接收头若发射接收安装在同侧,则被测物必须能反射该信号,发射接收安装在对侧,则被测物必须能阻挡透过该信
传感器测电机转速实验实验报告 朱张甫 冶金 1309 20132151 实验五传感器测电机转速实验 一、实验目的 了解磁电式传感器、霍尔传感器测量转速的原理及方法。 二、基本原理 磁电式传感器:基于电磁感应原理, N 匝线圈所在磁场的磁通变化时, 线圈中感应电势: 发生变化,因此当转盘上嵌入 n 个磁钢时,每转一周线圈感应电势产生 n 次 的变化,通过放大、整形和计数等电路即可以测量转速。 霍尔传感器:利用霍尔效应表达式:U H =K H IB ,当被测圆盘上装上 N 只磁性体时,圆盘每转一周磁场就变化 N 次。每转一周霍尔电势就同频率相应变化, 输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。 三、需用器件与单元 主机箱、磁电式传感器、霍尔传感器、转动源。
四、实验步骤 磁电式传感器测电机转速实验 1、根据图 5-1将磁电式转速传感器安装于磁电式架上,传感器探头中心与转盘磁钢对 准并调节升降杆使传感器端面与磁钢之间的间隙大约为 2~3mm。 图 5-1 磁电转速传感器实验安装、接线示意图 2、首先在接线以前, 合上主机箱电源开关, 将主机箱中的转速调节电源 0~24V 旋钮调到最小 (逆时针方向转到底后接入电压表 (显示选择打到 20V 档监测大约为 0V 左右;然后关闭主机箱电源,将磁电式转速传感器、转动电源按图 5-1 所示分别接到频率/转速表 (转速档的 Fin (1号 2号线可任意接到频率/转速表的 Fin 上和主机箱的相应电源上。 3、合上主机箱电源开关,在小于 12V 范围内 (电压表监测调节主机箱的转速调节电源 (调节电压改变电机电枢电压 ,观察电机转动及转速表的显示情况。 4、从 2V 开始记录每增加 1V 相应电机转速的数据 (待电机转速比较稳定后读取数据 ;
郑州轻工业学院 传感器及应用系统课程设计说明书基于线性霍尔元件的位移传感器 姓名:吴富昌 专业班级:电子信息工程13-01 学号:9 指导老师:陆立平 时间:2016.6.27 -2016.7.1
郑州轻工业学院 课程设计任务书 题目基于线性霍尔元件的位移传感器设计 专业、班级电子信息工程13-01 学号39 姓名吴富昌 主要内容、基本要求、主要参考资料等: 一、主要内容: 利用线性霍尔元件设计一个位移传感器。 二、基本要求: (1)设计一个位移传感器,并设计相关的信号处理电路。 (2)为达到误差控制要求,需要对霍尔元件的误差进行补偿校正,主要包含霍尔元件的零位误差及补偿和温度误差及补偿。 (3)完成系统框图和电路原理图的设计和绘制,系统理论分析和设计详细明确,有理有据。 (4)信号处理电路应包含激励信号电路、消除不等位电势补偿电路、放大电路、相敏检波电路和低通滤波电路等。 (5)利用软件仿真,得出主要信号输入输出点的波形,根据仿真结果验证设计功能的可行性、参数设计的合理性。 (6)根据模拟结果计算位移传感器的迟滞误差、线性度和灵敏度等参数。 (7)写出3000~5000字的设计报告,主体文本字号为小四号,标题章节字号依照美观合理原则选择,并合理加黑,字体均为宋体。 三、主要参考资料: (1)何金田,张斌主编,传感器原理与应用课程设计指南。哈尔滨:哈尔
滨工业大学出版社,2009.01. (2)周继明,刘先任、江世明等,传感器技术与应用实验指导及实验报告。长沙:中南大学出版社,2006.08. (3)陈育中,霍尔传感器测速系统的设计,科学技术与工程,2010,10:7529-7532. 完成期限:2016年6月27 日-2016年7月1日 指导教师签章: 专业负责人签章: 2016年 6 月27 日 基于线性霍尔元件的位移传感器设计 摘要 霍尔传感器是基于霍效应而将被测量转化成电动势输出的一种传感器。霍尔元件已发展成一个品种多样的磁传感器产品簇,并且得到广泛的应用。霍尔器件是一种磁传感器,用它可以检测磁场及其变化,可以在各种与磁有关的场合中使用。霍尔期间以霍尔效应为其工作原理。当被测物体分别与恒定电流I和恒定磁场B垂直二当被测物体相对于原来位置有微小位移变化时,会产生变化的磁通量,会在导体垂直于磁场和电流的两个端面之间产生电势差,即UH(霍尔电压)。本文主要研究微小位移与霍尔电压的关系来设计霍尔位移传感器。 关键词霍尔传感器位移霍尔电压
传感器测速实验报告 院系: 班级: 、 小组: 组员: 日期:2013年4月20日
实验二十霍尔转速传感器测速实验 一、实验目的 了解霍尔转速传感器的应用。 二、基本原理 利用霍尔效应表达式:U H=K H IB,当被测圆盘上装有N只磁性体时,圆盘每转一周磁场就变化N次。每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。 本实验采用3144E开关型霍尔传感器,当转盘上的磁钢转到传感器正下方时,传感器输出低电平,反之输出高电平 三、需用器件与单元 霍尔转速传感器、直流电源+5V,转动源2~24V、转动源电源、转速测量部分。 四、实验步骤 1、根据下图所示,将霍尔转速传感器装于转动源的传感器调节支架上,调节探头对准转盘内的磁钢。 图9-1 霍尔转速传感器安装示意图 2、将+15V直流电源加于霍尔转速器的电源输入端,红(+)、黑( ),不能接错。 3、将霍尔传感器的输出端插入数显单元F,用来测它的转速。 4、将转速调解中的转速电源引到转动源的电源插孔。 5、将数显表上的转速/频率表波段开关拨到转速档,此时数显表指示电机的转速。 6、调节电压使转速变化,观察数显表转速显示的变化,并记录此刻的转速值。
五、实验结果分析与处理 1、记录频率计输出频率数值如下表所示: 电压(V) 4 5 8 10 15 20 转速(转/分)0 544 930 1245 1810 2264 由以上数据可得:电压的值越大,电机的转速就越快。 六、思考题 1、利用霍尔元件测转速,在测量上是否有所限制? 答:有,测量速度不能过慢,因为磁感应强度发生变化的周期过长,大于读取脉冲信号的电路的工作周期,就会导致计数错误。 2、本实验装置上用了十二只磁钢,能否只用一只磁钢? 答:如果霍尔是单极的,可以只用一只磁钢,但可靠性和精度会差一些;如果霍尔 是双极的,那么必须要有一组分别为n/s极的磁钢去开启关断它,那么至少要两只磁钢。
测试技术应用案例 (霍尔传感器测量转速) 班级: 学号: 姓名:
霍尔传感器测量转速 一.霍尔传感器的优点 1.测量范围广:霍尔传感器可以测量任意波形的电流和电压, 如:直流、交流、脉冲波形等。 2.精度高:在工作温度区内精度优于1%,该精度适合于任何波形 的测量。 3.线性度好:优于%。 4.动态性能好:响应时间小于1μs跟踪速度di/dt高于50A/μs。 5.性价比高。 各式各样的霍尔传感器 二.霍尔传感器测转速原理 霍尔效应,是指磁场作用于载流金属导体、半导体中的载流子时,产生横向电位差的物理现象。当电流通过金属箔片时,若在垂直于电流的方向施加磁场,则金属箔片两侧面会出现横向电位差。利用霍尔效应可以设计制成多种传感器。霍尔电位差U H的基本关系为: U H=K H IB K H =1/nq(金属) 式中K H――霍尔系数;n――单位体积内载流子或自由电子的个数;q――电子电量;I――通过的电流;B――垂直于I的磁感应强度; 利用霍尔效应表达式:U H=K H IB,当被测物体上装上N只磁性体时,物体每转一周磁场就变化N次,霍尔电势相应变化N次,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。 三.测量设备 本案例以实验室霍尔元件测量圆盘转速为例。 实验设备:CSY2000系列传感器与检测技术实验台。
1、主控台部分,提供高稳定的±15V、+5V、±2V~±10V可 调、+2V~+24V可调四种直流稳压电源;主控台面板上还装有电压、频率、转速的3位半数显表。 2、旋转源0-2400转/分(可调) 需用器件与单元:霍尔传感器、5V直流源、转速调节装置、转动源单元、数显单元的转速显示部分。 四.实验方案 1.实验装置如下图 2.将5V直流源加于霍尔元件电源输入端。 3.将霍尔转速传感器输出端(黄)插入数显单元F i n端。 4.将转速调节中的2V-24V转速电源引入到台面上转动单元中转 动电源2-24VK插孔。 5.将数显单元上的转速/频率表波段开关拨到转速档,此时数显 表指示转速。 6.调节转速调节电压使转动速度变化。观察数显表转速显示的变 化。 五.实验结果计算 磁体经过霍尔元件,霍尔元件就会发出就会发出一个信号,经放大整形得到脉冲信号,两个脉冲的间隔时间即为周期,通过周期就可算出转速。
246810 1214 1618202224 霍尔传感器V-n 曲线图 电压(V )/V 转速(n )/r p m 霍尔测速实验报告 一、实验目的: 了解霍尔组件的应用——测量转速。 二、实验仪器: 霍尔传感器、+5V 、+4、±6、±8、±10V 直流电源、转动源、频率/转速表。 三、实验原理; 利用霍尔效应表达式:U H =K H IB ,当被测圆盘上装上N 只磁性体时,转盘每转一周磁场变化N 次,每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测出被测旋转物的转速。 四、实验内容与步骤 1.安装根据图28-1,霍尔传感器已安装于传感器支架上,且霍尔组件正对着转盘上的磁钢。 图28-1 2.将+5V 电源接到三源板上“霍尔”输出的电源端,“霍尔”输出接到频率/转速表(切换到测转速位置)。 3.打开实验台电源,选择不同电源+4V 、+6V 、+8V 、+10V 、12V (±6)、16V (±8)、20V (±10)、24V 驱动转动源,可以观察到转动源转速的变化,待转速稳定后记录相应驱动电压下得到的转速值。也可用示波器观测霍尔元件输出的脉冲波形。 五、数据记录与分析 2、用matlab 绘制V-RPM 曲线图
3、霍尔组件产生脉冲的原因 因为霍尔传感器本身是磁场和霍尔元件之间由于磁性交替变化而产生的脉冲信号变化。两者之间通常会设有遮光原件,能够在变化过程中间断的影响到两者之间的磁通量。有磁场照射霍尔元件导通,没有磁场照射霍尔元件截止,不断的交替变化引起了脉冲的信号变化,所以霍尔测速时,所长生的波形也就是脉冲电,只是随转速的改变频率发生了改变,频率变化越快证明转速越快。 六、实验报告 1.分析霍尔组件产生脉冲的原理。 2.根据记录的驱动电压和转速,作V-RPM曲线。
光电传感器测转速实验 实 验 指 导 书
简 介 一、本实验装置的设计宗旨: 本实验装置具有设计性、趣味性、开放性和拓展性,实验中大量重复的接线、调试和后续数据处理、分析、可以加深学生对实验仪器构造和原理的理解,有利于培养学生耐心仔细的实验习惯和严谨的实验态度。非常适合大中专院校开设开放性实验。本实验装置采用了性能比较稳定,品质较高的敏感器件,同时采用布局较为合理且十分成熟的电路设计。 二、光电传感器测转速实验实验装置 1.传感器实验台部分 2.九孔实验板接口平台部分:九孔实验板作为开放式和设计性实验的一个桥梁(平台); 3.JK-19型直流恒压电源部分:提供实验时所必须的电源; 4.处理电路模块部分:差动放大器、电压放大器、调零、增益、移相等模块组成。 三、主要技术参数、性能及说明: (1)光电传感器:由一只红外发射管与接收管组成。 (2)差动放大器:通频带kHz 10~0可接成同相、反相、差动结构,增益为100~1倍的直流放大器。 (3)电压放大器:增益约为5位,同相输入,通频带kHz 10~0。 (4)19JK -型直流恒压电源部分:直流V 15±,主要提供给各芯片电源: V 6 ,V 4 ,V 2±±±分三档输出,提供给实验时的直流激励源;V 12~0:A 1ax Im =作 为电机电源或作其它电源。 光电传感器测转速实验 【实验原理】 如图所示:光电传感器由红外发射二极管、红外接收管、达林顿出管及波形整形组成。
发射管发射红外光经电机转动叶片间隙,接收管接收到反射信号,经放大,波形整形输出方波,再经转换测出其频率,。 图1 【实验目的】 了解光电传感器测转速的基本原理及运用。 【实验仪器】 如图所示,光电式传感器、JK-19型直流恒压电源、示波器、差动放大器、电压放大器、频率计和九孔实验板接口平台。 图2 图3 【实验步骤】 1.先将差动放大器调零,按图1接线;
传感器课程设计说明书线性霍尔元件位移传感器 学号: 学院名称: 专业班级: 学生姓名: 教师姓名: 教师职称: 2015 年 1 月
线性霍尔元件位移传感器设计任务书 一、设计题目 线性霍尔元件位移传感器 二、设计目的 课程设计是工科各专业的主要实践性教学环节之一,是围绕一门主要基础课或专业课,运用所学课程的知识,结合实际应用设计而进行的一次综合分析设计能力的训练。《传感器技术》是测控技术与仪器专业的一门专业技能课,能够运用基本测控电路知识解决日常生活中的问题是本专业学生的基本素质。本次课程设计旨在培养学生运用所学过的理论知识,初步掌握解决实际应用问题时所应具有的查阅资料、综合运用所学知识的能力,为课程设计及今后从事专业学习工作打下坚实的基础。 三、设计内容及要求 1.掌握传感器工作原理 2.掌握信号处理电路的作用与原理 3.画出各电路处理后的信号波形 4.对位移进行测量(正负位移均三次以上) 5.算出传感器的迟滞误差、线性度 6.写出说明书。 四、设计方法和基本原理 1.问题描述 设计一个既能测量位移的大小,也能判别方向的线性霍尔元件位移传感器。 2.解决方案 ①搜集资料,确定电路原理图(包括激励信号电路、消除不等位电势补偿电路、放大电路、移相电路、相敏检波电路和低通滤波电路等信号处理电路) ②搭建实物测量系统,调试各部分电路。 ③测试得出相应的实验数据,给出相应的波形,计算出传感器的量程、线性度和灵敏度、迟滞误差。写出说明书,答辩。
目录 第一章引言 (2) 第二章霍尔传感器工作原理 (2) 2.1霍尔效应 (2) 2.2霍尔元件的主要特性 (4) 2.3霍尔传感器的应用 (4) 第三章测量系统组成 (7) 3.1霍尔元件的误差及补偿 (7) 3.1.1霍尔元件的零位误差与补偿 (7) 3.1.2霍尔元件的温度误差及补偿 (7) 3.2 直流激励的霍尔传感器电路 (8) 3.3交流激励的霍尔传感器电路 (8) 3.3.1传感器补偿放大电路 (8) 3.3.2移相电路 (9) 3.3.2相敏检波电路 (10) 3.3.4低通滤波电路 (10) 第四章电路测试与结果 (11) 4.1进行各部分电路线路元件的连接组装 (11) 4.2移相电路的测试 (12) 4.3相敏检波电路的测试 (13) 4.4低通滤波电路测试 (15) 第五章传感器测试与数据处理 (16) 5.1传感器的回程差 (16) 5.2传感器的灵敏度 (17) 5.3传感器的线性度 (18)
河南工程学院 课程设计 霍尔转速测量 学生姓名:## 学院:电气信息工程学院专业班级:电气工程及其自动化####专业课程:自动检测技术 指导教师:## 2014年6月26日
一、设计的背景和目的 1.设计的背景 在工程实践中,我们经常会遇到各种需要测量转速的场合。例如在发动机、电动机等旋转设备的试验、运转和控制中,常需要分时和连续测量和显示其转速及瞬时速度。 传统式的转速测量通常是采用测速发电机为检测元件,这种方法是模拟式的,因此其得到的信号是电压信号,其抗干扰能力差,灵活性差。霍尔元件是一种基于霍尔效应的磁传感器,已发展成一个品种多样的磁传感器产品族,并已得到广泛的应用。霍尔器件是一种磁传感器。用它们可以检测磁场及其变化,可在各种与磁场有关的场合中使用。霍尔器件以霍尔效应为其工作基础。霍尔器件具有许多优点,它们的结构牢固,体积小,重量轻,寿命长,安装方便,功耗小,频率高(可达1MHZ),耐震动,不怕灰尘、油污、水汽及盐雾等的污染或腐蚀。霍尔线性器件的精度高、线性度好;霍尔开关器件无触点、无磨损、输出波形清晰、无抖动、无回跳、位置重复精度高(可达μm级)。采用了各种补偿和保护措施的霍尔器件的工作温度范围宽,可达.55℃~150℃。按照霍尔器件的功能可将它们分为:霍尔线性器件和霍尔开关器件。前者输出模拟量,后者输出数字量。 2.设计的目的 实验介绍了霍尔传感器的工作原理,阐述了霍尔传感器测速系统的工作过程,利用脉冲计数法实现了对转速的测量,利用硬件电路设计,编制了电机转速的测量设计了测量模块、显示模块等,并通过PROTEUSE软件进行了仿真。仿真结果表明所设计的电路原理上是可行的。 二、设计的功能 根据霍尔传感器的原理,当转动的物体比如说电机在转动时,如果能在其转子上加上一个磁铁,然后让霍尔传感器去感受就能在LED数码管上得到一定时间内的转动的脉冲数,然后通过芯片的内部计算从而得到转速,并且显示在数码管
传感器测转速的原理 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 转速测量原理 转速的测量方法很多,根据脉冲计数来实现转速测量的方法主要有M法(测频法)、T 法(测周期法)和MPT法(频率周期法),该系统采用了M法(测频法)。由于转速是以单位时间内转数来衡量,在变换过程中多数是有规律的重复运动。根据霍尔效应原理,将一块永久磁钢固定在电机转轴上的转盘边沿,转盘随测轴旋转,磁钢也将跟着同步旋转,在转盘下方安装一个霍尔器件,转盘随轴旋转时,受磁钢所产生的磁场的影响,霍尔器件输出脉冲信号,其频率和转速成正比。脉冲信号的周期与电机的转速有以下关系: 霍尔传感器如何测转速_霍尔传感器测转速原理 式中:n为电机转速;P为电机转一圈的脉冲数;T为输出方波信号周期根据公式即可计算出直流电机的转速。 测量电机转速的第一步就是要将电机的转速表示为单片机可以识别的脉冲信号,从而进行脉冲计数。霍尔器件作为一种转速测量系统的传感器,它有结构牢固、体积小、重量轻、寿命长、安装方便等优点,因此选用霍尔传感器检测脉冲信号,其基本的测量原理如图所示,
当电机转动时,带动传感器运动,产生对应频率的脉冲信号,经过信号处理后输出到计数器或其他的脉冲计数装置,进行转速的测量。 霍尔传感器如何测转速_霍尔传感器测转速原理 霍尔传感器测转速方案 霍尔效应,是指磁场作用于载流金属导体、半导体中的载流子时,产生横向电位差的物理现象。当电流通过金属箔片时,若在垂直于电流的方向施加磁场,则金属箔片两侧面会出现横向电位差。利用霍尔效应可以设计制成多种传感器。霍尔电位差UH的基本关系为: 霍尔传感器如何测转速_霍尔传感器测转速原理
实验十四直流激励时霍尔式传感器位移特性实验 一、实验目的:了解霍尔式传感器原理与应用。 二、基本原理:根据霍尔效应,霍尔电势U H=K H IB,当霍尔元件处在梯度磁场中运动时,它就可以进行位移测量。 三、需用器件与单元:霍尔传感器实验模板、霍尔传感器、直流源±4V、±15V、测微头、数显单元、相敏检波、移相、滤波模板、双线示波器。 四、实验步骤: (一)直流激励时霍尔式传感器 1、将霍尔传感器按图5-1安装。霍尔传感器与实验模板的连接按图5-2进行。1、3为电源±4V, 2、4为输出。 图5-1 霍尔传感器安装示意图 2、开启电源,调节测微头使霍尔片在磁钢中间位置再调节R W1使数显表指示为零。
图5-2 霍尔传感器位移直流激励实验接线图 3、旋转测微头向轴向方向推进,每转动0.2mm记下一个读数,直到读数 近似不变,将读数填入表5-1。 X(mm) 9.700 9.500 9.300 9.100 8.900 8.700 8.500 8.300 8.100 7.900 V(v) 0 0.01 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 X(mm) 7.700 7.500 7.300 7.100 6.900 6.700 6.500 6.300 6.100 5.900 V(v) 0.09 0.10 0.11 0.12 0.13 0.14 0.15 0.16 0.18 0.19 X(mm) 5.700 5.500 5.300 5.100 4.900 4.700 V(v) 0.20 0.21 0.22 0.23 0.24 0.24 作出V-X曲线,计算不同线性范围时的灵敏度和非线性误差。
课程设计报告书
2.概述 2.1系统组成框图 系统由传感器、信号预处理电路、处理器、显示器和系统软件等部分组成。传感器部分采用霍尔传感器,负责将电机的转速转化为脉冲信号。信号预处理电路包含待测信号放大、波形变换、波形整形电路等部分,其中放大器实现对待测信号的放大,降低对待测信号的幅度要求,实现对小信号的测量;波形变换和波形整形电路实现把正负交变的信号波形变换成可被单片机接受的TTL/CMOS兼容信号。处理器采用AT89C51单片机,显示器采用8位LED数码管动态显示。本课题采用的是以8051系列的A T89C51单片机为核心开发的霍尔传感器测转速的系统。系统硬件原理框图如图1所示: 图1 系统框图 2.2系统工作原理 转速是工程上一个常用的参数,旋转体的转速常以每分钟的转数来表示。其单位为 r/min。由霍尔元件及外围器件组成的测速电路将电动机转速转换成脉冲信号,送至单片机AT89C51的计数器 T0进行计数,用T1定时测出电动机的实际转速。此系统使用单片机进行测速,采用脉冲计数法,使用霍尔传感器获得脉冲信号。其机械结构也可以做得较为简单,只要在转轴的圆盘上粘上两粒磁钢,让霍尔传感器靠近磁钢,机轴每转一周,产生两个脉冲,机轴旋转时,就会产生连续的脉冲信号输出。由霍尔器件电路部分输出,成为转速计数器的计数脉冲。控制计数时间,即可实现计数器的计数值对应机轴的转速值。单片机CPU将该数据处理后,通过LED显示出来。
2.2.1霍尔传感器 霍尔传感器是对磁敏感的传感元件,由磁钢、霍耳元件等组成。测量系统的转速传感器选用SiKO 的 NJK-8002D 的霍尔传感器,其响应频率为100KHz ,额定电压为5-30(V )、检测距离为10(mm )。其在大电流磁场或磁钢磁场的作用下,能测量高频、工频、直流等各种波形电流。该传感器具有测量精度高、电压范围宽、功耗小、输出功率大等优点,广泛应用在高速计数、测频率、测转速等领域。输出电压4~25V ,直流电源要有足够的滤波电容,测量极性为N 极。安装时将一非磁性圆盘固定在电动机的转轴上,将磁钢粘贴在圆盘边缘,磁钢采用永久磁铁,其磁力较强,霍尔元件固定在距圆盘1-10mm 处。当磁钢与霍尔元件相对位置发生变化时,通过霍尔元件感磁面的磁场强度就会发生变化。圆盘转动,磁钢靠近霍尔元件,穿过霍尔元件的磁场较强,霍尔元件输出低电平;当磁场减弱时,输出高电平,从而使得在圆盘转动过程中,霍尔元件输出连续脉冲信号。这种传感器不怕灰尘、油污,在工业现场应用广泛。 2.2.2转速测量原理 霍尔器件是由半导体材料制成的一种薄片,器件的长、宽、高分别为 l 、b 、d 。若在垂直于薄片平面(沿厚度 d )方向施加外磁场B ,在沿l 方向的两个端面加一外电场,则有一定的电流流过。由于电子在磁场中运动,所以将受到一个洛仑磁力,其大小为:qVB f = 式中:f —洛仑磁力, q —载流子电荷, V —载流子运动速度, B —磁感应强度。 这样使电子的运动轨迹发生偏移,在霍尔元器件薄片的两个侧面分别产生电子积聚或电荷过剩,形成霍尔电场,霍尔元器件两个侧面间的电位差H U 称为霍尔电压。 霍尔电压大小为: H U H R =d B I /??(mV) 式中:H R —霍尔常数, d —元件厚度,B —磁感应强度, I —控制电流 设 H K H R =d /, 则H U =H K d B I /??(mV) H K 为霍尔器件的灵敏系数(mV/mA/T),它表示该霍尔元件在单位磁感应强度和 单位控制电流下输出霍尔电动势的大小。应注意,当电磁感应强度B 反向时,霍尔电动势也反向。图2为霍耳元件的原理结构图。
霍尔测速实验 一、实验目的:了解霍尔转速传感器的应用。 二、基本原理:利用霍尔效应表达式U H = K H IB ,当被测圆盘上装上N 只磁性 体时,圆盘每转一周,磁场就变化N 次,霍尔电势相应变化N 次,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速(转速=60*频率/12) 三、需用器件与单元:霍尔转速传感器、转速调节2-24V 、转动源单元、数显单元的转速显示部分。 四、实验步骤: 1、根据图5-4,将霍尔转速传感器装于传感器支架上,探头对准反射面的磁 钢。 2、将直流源加于霍尔元件电源输入端。红(+)接+5V ,黑(┴)接地。 3、将霍尔转速传感器输出端(蓝)插入数显单元F in 端。 4、将转速调节中的2-24V 转速电源引到转动源的2-24V 插孔。 5、将数显单元上的转速/频率表波段开关拨到转速档,此时数显表指示转速。 6、调节电压使转动速度变化。观察数显表转速显示的变化。 五、思考题: 1、利用霍尔元件测转速,在测量上是否有限制? 2、本实验装置上用了十二只磁钢,能否用一只磁钢,二者有什么区别呢? 图1霍尔、光电、磁电转速传感器安装示意图
实验三十一光纤传感器测速实验 一、实验目的:了解光纤位移传感器用于测量转速的方法。 二、基本原理:利用光纤位移传感器探头对旋转体被测物反射光的明显变化产生的电脉冲,经电路处理即可测量转速。 三、需用器件与单元:光纤传感器、光纤传感器实验模块、转速/频率数显表、直流源±15V、转速调节2~24V,转动源模块。 四、实验步骤: 1、光纤传感器按图1装于传感器支架上,使光纤探头与电机转盘平台中磁钢反射点对准。 2、按“光纤位移特性实验”的连线图,如图2所示,将光纤传感器实验模 块输出V o1与数显电压表V i 端相接,接上实验模块上±15V电源,数显表的切换 开关选择开关拨到20V档。①用手转动圆盘,使探头避开反射面(暗电流),合 上主控箱电源开关,调节Rw 2使数显表显示接近零(≥0),此时Rw 1 处于中间位 置。②再用手转动圆盘,使光纤探头对准反射点,调节升降支架高低,使数显表 指示最大,重复①、②步骤,直至两者的电压差值最大,再将V o1 与转速/频率数显表fi输入端相接,数显表的波段开关拨到转速档。 图2光纤传感器位移实验模块 3、将转速调节2-24V,接入转动电源24V插孔上,使电机转动,逐渐加大转速源电压。使电机转速盘加快转动,固定某一转速,观察并记下数显表上的读 数n 1 。 4、固定转速电压不变,将选择开关拨到频率测量档,测量频率,记下频率 读数,根据转盘上的测速点数折算成转速值n 2 (转速和频率的折算关系为:转速=频率*60/12)。 5、将实验步骤4与实验步骤3比较,以转速n 1 作为真值计算两种方法的测
传感器测电机转速实验 实验报告 朱张甫 冶金1309 20132151
实验五 传感器测电机转速实验 一、实验目的 了解磁电式传感器、霍尔传感器测量转速的原理及方法。 二、基本原理 磁电式传感器:基于电磁感应原理,N 匝线圈所在磁场的磁通变化时, 线圈中感应电势: 发生变化,因此当转盘上嵌入n 个磁钢时,每转一周线圈感应电势产生n 次 的变化,通过放大、整形和计数等电路即可以测量转速。 霍尔传感器:利用霍尔效应表达式:U H =K H IB ,当被测圆盘上装上N 只磁性体时,圆盘每转一周磁场就变化N 次。每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。 三、需用器件与单元 主机箱、磁电式传感器、霍尔传感器、转动源。 四、实验步骤 磁电式传感器测电机转速实验 1、根据图5-1将磁电式转速传感器安装于磁电式架上,传感器探头中心与转盘磁钢对 准并调节升降杆使传感器端面与磁钢之间的间隙大约为2~3mm。 图5-1 磁电转速传感器实验安装、接线示意图 2、首先在接线以前,合上主机箱电源开关,将主机箱中的转速调节电源0~24V 旋钮调 到最小(逆时针方向转到底)后接入电压表(显示选择打到20V 档)监测大约为0V 左右;然后 关闭主机箱电源,将磁电式转速传感器、转动电源按图5-1 所示分别接到频率/转速表(转速档)的Fin (1号2号线可任意接到频率/转速表的Fin 上)和主机箱的相应电源上。 3、合上主机箱电源开关,在小于12V 范围内(电压表监测)调节主机箱的转速调节电源(调节电压改变电机电枢电压),观察电机转动及转速表的显示情况。 4、从2V 开始记录每增加1V 相应电机转速的数据(待电机转速比较稳定后读取数据) ;
实验14直流激励时霍尔传感器位移特性实验 一、实验目的: 了解直流激励时霍尔式传感器的特性。 二、基本原理: 根据霍尔效应,霍尔电势U H =K H IB,当霍尔元件处在梯度磁场中运动时,它的电势 会发生变化,利用这一性质可以进行位移测量。 三、需用器件与单元: 主机箱、霍尔传感器实验模板、霍尔传感器、测微头、数显单元。 四、实验步骤: 1、霍尔传感器和测微头的安装、使用参阅实验九。按图14示意图接线(实验模板的输出Vo1接主机箱电压表Vin),将主机箱上的电压表量程(显示选择)开关打到2V 档。 2、检查接线无误后,开启电源,调节测微头使霍尔片大致在磁铁中间位置,再调节Rw1使数显表指示为零。 3、以某个方向调节测微头2mm位移,记录电压表读数作为实验起始点;再反方向调节测微头每增加记下一个读数,将读数填入表14。 表14 作出V-X曲线,计算不同线性范围时的灵敏度和非线性误差。 五、实验注意事项: 1、对传感器要轻拿轻放,绝不可掉到地上。 2、不要将霍尔传感器的激励电压错接成±15V,否则将可能烧毁霍尔元件。 六、思考题: 本实验中霍尔元件位移的线性度实际上反映的是什么量的变化 答:本人认为应该是实际的输入、输出与拟合的理想的直线的偏离程度的变化,当X不同的时候,实际的输出值与根据拟合直线得到的数值的偏离值是不相同的。
七、实验报告要求: 1、整理实验数据,根据所得得实验数据做出传感器的特性曲线。 实验数据如下: 表9-2 (1)由上图可知灵敏度为S=ΔV/ΔX=mm (2)由上图可得非线性误差: 当x=1mm时, Y=×1+= Δm== yFS= δf=Δm/yFS×100%=% 当x=3mm时: Y=×3+= Δm=Y-()= yFS= δf=Δm/yFS×100%=% 2、归纳总结霍尔元件的误差主要有哪几种,各自的产生原因是什么,应怎样进行补偿。答:(1)零位误差。零位误差由不等位电势所造成,产生不等位电势的主要原因是:两个霍尔电极没有安装在同一等位面上;材料不均匀造成电阻分布不均匀;控制电极接触不良,造成电流分布不均匀。补偿方法是加一不等位电势补偿电路。 (2)温度误差。因为半导体对温度很敏感,因而其霍尔系数、电阻率、霍尔电势的输入、输出电阻等均随温度有明显的变化,导致了霍尔元件产生温度误差。补偿方法是采用恒流源供电和输入回路并联电阻。 实验15 交流激励时霍尔传感器位移特性实验 一、实验目的: 了解交流激励时霍尔式传感器的特性。
霍尔传感器测量转速 测量转速的方法分为模拟式和数字式两种。数字式通常采用光电编码器、圆光栅、霍尔元件等为检测元件,得到的信号是脉冲信号。单片机技术的日新月异,特别是高性能价格比的单片机的出现,转速测量普遍采用以单片机为核心的数字式测量方法,使得许多控制功能及算法可以采用软件技术来完成。采用单片机构成控制系统,可以节约人力资源和降低系统成本,从而有效的提高工作效率。 利用霍尔传感器来测量转速。由磁场的变化来使霍尔传感器产生脉冲,由单片机计数,经过数据计算转化成所测转速,再由数码管显示出来。 一、主要内容 利用强磁铁与霍尔元件组成测试转体转速的测量电路,包括计数与显示电路。 二、基本要求 1. 实现基本功能 3. 画出电路图 三、主要技术指标(或研究方法) 测量范围0—6000r/min 精度±5r/min 工作电压5V~12V 工作电流低于500mA 工作环境温度-60℃~65℃ 四、 应收集的资料及参考文献 霍尔元件原理与应用 显示元件原理 数据采样整理单 2.1 系统组成框图 在测量电机转速时采用电磁感应式传感器。当电机转动时,带动传感器。这种传感器可以将转速信号转变成一个对应频率的脉冲信号输出,经过信号处理后输出到计数器。脉冲信号的频率与电机的转速是一种线性的正比关系,因此对电机转速的测量,实质上是对脉冲信号的频率的测量。 我采用的是以STC89C52单片机为核心将处理好的信号经过数据处理转换成所测得的实际十进制信号的系统。系统硬件原理框图如图2-1:
系统框图原理如图2-1所示,系统由传感器、信号处理、显示电路和系统软件等部分组成。传感器采用霍尔传感器,负责将转速转化为脉冲信号。信号处理电路包含待测信号放大、波形变换、波形整形电路等部分,其中放大器实现对待测信号的放大,降低对待测信号的幅度要求,实现对小信号的测量;波形变换和波形整形电路实现把正负交变的信号波形变换成可被单片机接受的TTL/CMOS 兼容信号。 处理器采用STC89C52单片机,显示器采用8位LED 数码管动态显示。 2.2霍尔传感器测转速原理及特性 1、霍尔传感器测速原理: 霍尔器件是由半导体材料制成的一种薄片,器件的长、宽、高分别为 l 、b、d。若在垂直于薄片平面(沿厚度 d)方向施加外磁场B,在沿l方向的两个端面加一外电场,则有一定的电流流过。由于电子在磁场中运动,所以将受到一个洛仑磁力,其大小为: qVB f = 式中:f —洛仑磁力, q—载流子电荷, V—载流子运动速度, B—磁感应强度。 这样使电子的运动轨迹发生偏移,在霍尔元器件薄片的两个侧面分别产生电子积聚或电荷过剩,形成霍尔电场,霍尔元器件两个侧面间的电位差H U 称为霍尔电压。 霍尔电压大小为: H U H R =d B I /??(mV) 式中:H R —霍尔常数, d—元件厚度, B—磁感应强度, I—控制电流 设 H K H R =d /, 则H U =H K d B I /??(mV) 为霍尔器件的灵敏系数(mV/mA/T),它表示该霍尔元件在单位磁感应强度和单位控制电流下输 出霍尔电动势的大小。应注意,当电磁感应强度B反向时,霍尔电动势也反向。 若控制电流保持不变,则霍尔感应电压将随外界磁场强度而变化,根据这一原理,可以将两块永久磁钢固定在电动机转轴上转盘的边沿,转盘随被测轴旋转,磁钢也将跟着同步旋转,在转盘附近安装一个霍尔元件,转盘随轴旋转时,霍尔元件受到磁钢所产生的磁场影响,输出脉冲信号。传 单 片 机 四位数码管显示电路 霍尔传感器 信号处理 图2-1系统框图