非线性动力学复习参考
1、简述绘制相轨线的原理及其作用。
解:单自由度机械系统的自由振动,其动力学方程的一般形式为
x f x x
+= (1)
(,)0
引入新的变量y表示速度x
(2)
则系统的运动状态由位置x及速度y所体现,x和y构成系统的状态变量,方程(1)可写为状态变量的一阶微分方程组:
==- (3)
,(,)
x y y f x y
设状态变量的初始条件为
(4)
方程(3)的满足初始条件(4)的解x(t) 和y(t) 完全确定系统的
运动过程。以x和y为直角坐标建立(x,y)平面,称为系统的相平面。
与系统的运动状态一一对应的相平面上的点称为系统的相点。系统的运动过程可以用相点在相平面上的移动过程来描述。相点移动的轨迹称为相轨迹。不同初始条件的相轨迹组成相轨迹族。
现在我们来推导,如何利用该微分方程组得到相轨迹族。
绘制相轨迹线的作用:
相轨迹线可以帮助我们定性地了解系统在不同初始条件下的运动全貌。当系统是强非线性振动的时候,近似解析法(如小参数摄动法,多尺度法)不再适用,此时可以采用相轨迹法来研究。
相轨迹的奇点和极限环分别对应于系统的平衡状态和周期运动分析。奇点和极限环的类型可以判断平衡状态和周期运动的稳定性,以及受扰动后可能具有的振动特性。
6、简述非线性单自由度保守系统自由振动的主要特点及其与线性系
统的区别。
解:(1)非线性保守系统的动力学方程的一般形式为 ()0x f x +=,
化为状态方程为 对应的相轨迹微分方程为 ;
(2)相轨迹线在平面上,只有当总能量大于势能时,速度才有实数解,而且y 关于X 轴对称;
()
x y y f x =??=-?
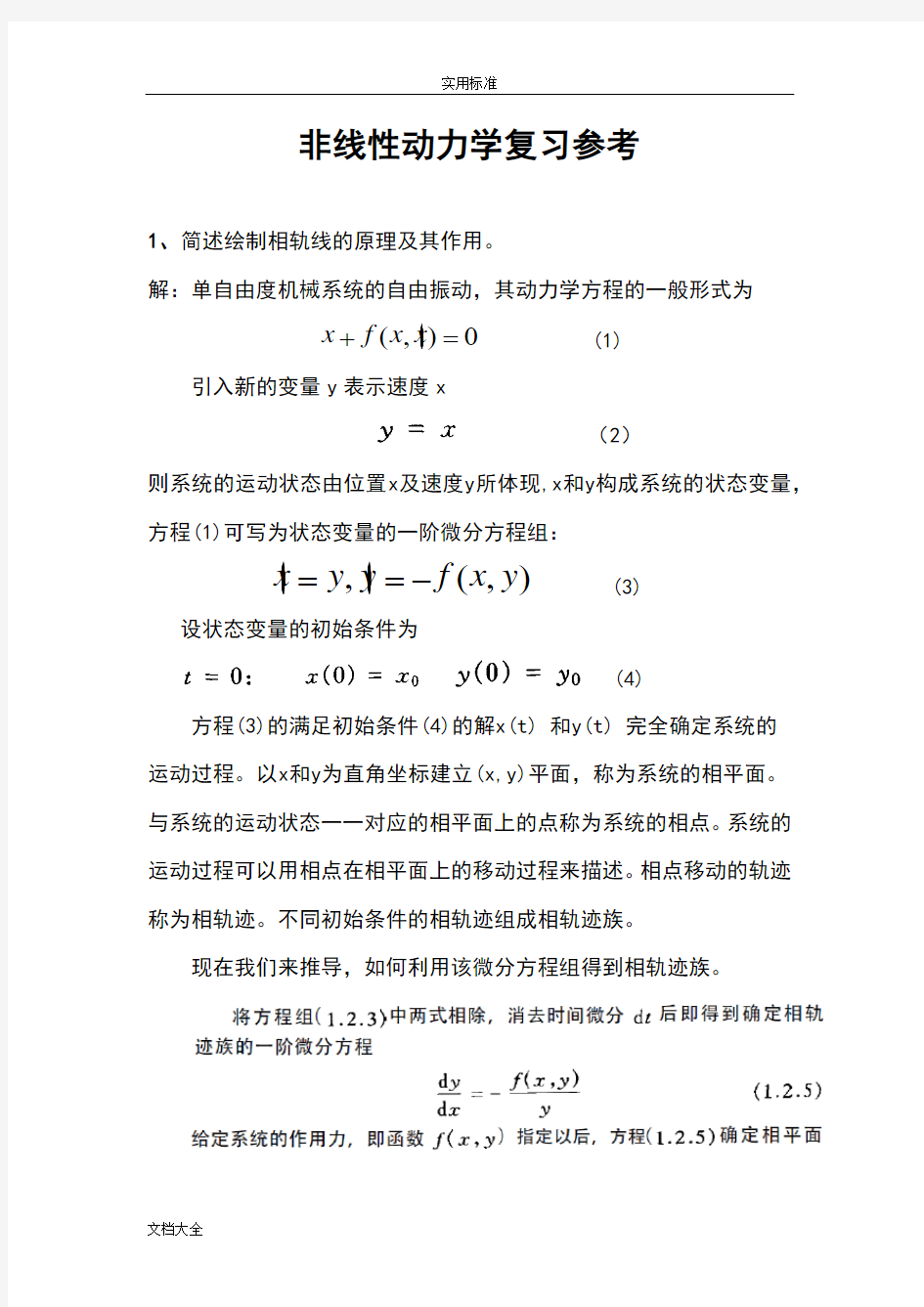
(3)相轨迹微分方程决定了相平面上的一个方向场:
f(x)=0 处有水平切线,y=0时,有竖直切线;
当f(x),y同时为零时,相轨线的斜率不定,称这一点为奇点,奇点的速度、加速度都为零,代表了平衡点,其它各点的斜率都是确定的,称为正常点,所以保守系统的相轨线在正常点是互不相交的。
(4)势能函数在局部是单调函数;有孤立的极大值(鞍点);有孤立的极小值(中心);
(5)保守系统自由振动的周期,一般情况下随初始条件的不同而变化;
(6)保守系统的势能在平衡状态处有非孤立极小值,则平衡状态不稳定;
(7) 恢复力与位移不成线性比例或阻尼力与速度不成线性比例;(8)非线性单自由度保守系统自由振动的机械能守恒。
非线性系统与线性系统的区别:
(1)非线性保守系统振动周期随初始条件的不同而变化;而线性保守系统的振动周期与初始条件无关。
(2) 线性系统,质量不变、弹性力和阻尼力与运动参数成线性关系,其数学描述为线性常系数常微分方程。而非线性系统不满足此条件。
7、简述非线性单自由度系统在简谐激励下的强迫振动特点。
解:在各种近似解析方法中,谐波平衡法是最简单明了的,其基本思想是将振动系统的激励项和方程的解都展成傅里叶级数。从物理意义考虑,为保证系统的作用力与惯性力的各阶谐波分量自相平衡,必须令动力学方程两端的同阶谐波的系数相等,从而得到包含未知系数的一系列代数方程,以确定待定的傅里叶级数的系数。
非线性单自由度系统在简谐激励下的强迫振动特点:
(1)
(2)自由振动的频率随振幅改变,而不同于线性系统的固有频率;(3)周期解中除基频为w的谐波以外,还有频率为3w,5w...的高次谐波存在,是非线性系统区别于线性系统的本质特点;(4)振幅突然变化的现象——突跳现象,也是非线性系统特有的现象之一;
(5)在非线性系统中,当干扰力频率在派生系统固有频率附近变化而受迫振动振幅很大时,发生主共振。一定条件下还会发生超
谐共振、亚谐共振、组合共振等非主共振现象。
8、简述自激振动产生的主要原因及其特点。
解:自激振动靠系统外的来源补充能量,但能源是恒定的,而不是周期变化的,系统以自己的运动状态作为调节器,以控制能量的输入。这类系统能自主地从定常的能源汲取能量,调节器的作用使输入的能量具有交变性。当输入的能量与耗散的能量达到平衡时,系统即可维持等幅振动。自振系统由三部分构成,即:(1)恒定的能源;(2)耗散的振动系统;(3)受系统运动状态反馈的调节器
自振系统框图
自激振动有以下特征:
(1)振动过程中,存在能量的输入与耗散,因此自振系统为非保守
系统。
(2)能源恒定,能量的输入仅受运动状态,即振动系统的位移和速
度的调节,因此自振系统不显含时间变量,为自治系统。
(3)振动的特征量,如频率和振幅,由系统的物理参数确定,与初
始条件无关。
(4)自治的线性系统只能产生衰减自由振动,无耗散时也只能产生
振幅由初始条件确定的等幅自由振动。因此自振系统必为非线性系统。(5)自激振动的稳定性取决于能量的输入与耗散的相互关系。若振
幅偏离稳态值时,能量的增减能促使振幅回至稳态值,则自激振动稳定。(如图a)反之,自激振动不稳定(如图b)
自振系统能量振幅关系曲线
10.简述非线性系统的分叉和混沌现象。
解:分岔现象是指振动系统的定性行为随着系统参数的改变而发生质的变化,它起源于力学失稳现象的研究。
在一些应用问题中,有时只需要研究平衡点和闭轨迹附近相轨迹的变化,即在平衡点或闭轨迹的某个邻域中的分岔,这类分岔问题称为局部分岔。如果需要考虑相空间中大范围的分岔性态,则称为全局分岔。显然,系统的“局部”和“全局”性质是密切相关的,局部分岔本身也是全局分岔研究的重要内容。
如果只研究平衡点个数和稳定性随参数的变化,则称为静态分岔,动态分岔是指静态分岔之外的分岔现象.
分岔现象的研究主要可以概括为四个方面。(1)确定分岔集,即
建立分岔的必要条件和充分条件;(2)分析分岔的定性性态,即出现分岔时系统拓扑结构随参数变化情况(3)计算分岔解,尤其是平衡点和极限环(4)考察不同分岔的相互作用,以及分岔与混沌等其它动力学现象的关系.
分岔理论的重要方面是系统的降维,即将原来需要研究的高维系统转化为较低维数的系统而保持分岔特性不变。李雅普诺夫施密特约化(简称LS约化)是将高维非线性系统平衡点分岔问题等效地简化为低维系统问题的一种方法。
中心流形方法是非线性系统理论的重要内容。中心流形是线性系统的中心子空间概念在非线性系统中的推广。在高维非线性系统非双曲平衡点的邻域内,存在一类维数较低的局部不变流形,当系统的相轨迹在此流形上时可能存在分岔,而在该流形之外,动力学行为非常简单,例如以指数方式被吸引到该流形。
分岔理论的另一重要问题是降维以后所得到系统的简化,在保持分岔特性的前提下尽可能转化为较为简单和规范的形式。在分岔理论中系统的简化主要有两种方法即庞加莱---伯克霍夫范式和奇异性理论。
在分岔研究中,一般只考虑参数在分岔值附近时系统定性性态的变化。然而,在分岔参数的整个变化范围内,系统可能在不同的分岔值处相继地出现分岔。这种相继地分岔对于研究系统随参数演变的全局过程起重要作用。
分岔理论的研究不仅揭示了系统的各种运动状态之间的相互联
系和转化,而且与混沌密切相关,成为非线性动力学的重要组成部分
线性系统与非线性系统存在许多本质差别,非线性振动系统中的混沌称为混沌振动,也简称为混沌。
混沌振动是非线性系统特有的一种振动形式,是产生于确定性系统的敏感依赖于初始条件的往复性非周期运动,类似于随机振动
而具有长期不可预测性。
混沌振动的往复非周期特性可以利用相平面图的几何方法表示出来。周期运动每隔一个周期就要重复以前的运动,即存在常数T满足
故周期运动的相轨迹曲线
是闭曲线。混沌不具有周期性,因而混沌振动的相轨迹曲线是不封闭的曲线,而运动的往复性则反映在相轨迹曲线局限于一有界区域内,不会发散到无穷远
随着对混沌研究的深入,可以从不同的角度对混沌概念进行拓广:
前述混沌概念是针对非线性系统的稳态运动而言,但一些非线性系统可能具有很长的过渡性动力学行为,最后呈现周期性的稳态运动。这种相当长的过渡过程若为具有初态敏感性的往复非周期运动,可称为暂态混沌。
在系统达到稳态运动之前,暂态混沌与真正的混沌极难区分。弹性体和流体等分布参数力学系统的自由度数为无穷多,因而称为
无穷维系统。无穷维系统的运动不仅与初值条件有关,而且与边界条件有关。若无穷维系统的动力学行为对边界条件具有敏感性,称这种
运动为空间混沌。若无穷维系统的动力学行为在时间维度和空间维度上都具有混沌特性,称这种运动为时空混沌。
通常理解的混沌为确定性系统的一种动力学行为,然而随机非线性系统特别是受小随机噪声扰动的非线性系统也可能出现类似混
沌的运动。随机非线性系统中具有初态敏感性的运动称为随机混沌。
机械系统动力学报告 题目:电梯机械系统的动态特性分析 姓名: 专业: 学号:
电梯机械系统的动态特性分析 一、课题背景介绍 随着社会的快速发展,城市人口密度越来越大,高层建筑不断涌现,因此,现在对电梯的提出了更高的要求,随着科技的进步,在满足客观需求的基础上,电梯向着舒适性,高速,高效的方向发展。在电梯的发展过程中,安全性和功能性一直是电梯公司首要考虑的因素,其中舒适性也要包含在电梯的设计中,避免出现速度或者加速度出现突变,或者电梯运行过程中的振动引起人们的不适。因此,在电梯的设计过程中,对电梯进行动态特性分析是十分必要的。 二、在MATLAB中编程、绘图。 通过同组小伙伴的努力,已经得到了该系统的简化模型与运动方程。因此进行编程: 该系统的微分方程:[][][]{}[]Q x k x c x M= + ? ? ? ? ? ? + ? ? ? ? ? ?? ? ? ,其中矩阵[M]、 [C]、[K]、[Q]都已知。 该系统的微分方程是一个二阶一元微分方程,在MATLAB中,提供有求解常微分方程数值解的函数,其中在MATLAB中常用的求微分方程数值解的有7个:ode45,ode23,ode113,ode15s,ode23s,ode23t,ode23tb 。 ode是MATLAB专门用于解微分方程的功能函数。该求解器有变步长(variable-step)和定步长(fixed-step)两种类型。不同类型有着不同的求解器,其中ode45求解器属于变步长的一种,采用Runge-Kutta
算法;和他采用相同算法的变步长求解器还有ode23。 ode45表示采用四阶,五阶Runge-Kutta单步算法,截断误差为(Δx)^3。解决的是Nonstiff(非刚性)常微分方程。 ode45是解决数值解问题的首选方法,若长时间没结果,应该就是刚性的,可换用ode23试试。 Ode45函数调用形式如下:[T,Y]=ode45(odefun,tspan,y0) 相关参数介绍如下: 通过以上的了解,并对该微分方程进行变换与降阶,得出程序。MATLAB程序: (1)建立M函数文件来定义方程组如下: function dy=func(t,y) dy=zeros(10,1); dy(1)=y(2); dy(2)=1/1660*(-0.006*y(2)+0.003*y(4)-0.0006*y(10)-1.27*10^7*y(1)+1.27*10^7*y (3)+2.54*10^6*y(9)); dy(3)=y(4); dy(4)=1/1600*(+0.03*y(2)-0.007*y(4)+0.003*y(6)+1.27*10^7*y(1)-7.274*10^8*y(3 )+1.27*10^7*y(5)); dy(5)=y(6);
第一章非线性动力学分析方法(6学时) 一、教学目标 1、理解动力系统、相空间、稳定性的概念; 2、掌握线性稳定性的分析方法; 3、掌握奇点的分类及判别条件; 4、理解结构稳定性及分支现象; 5、能分析简单动力系统的奇点类型及分支现象。 二、教学重点 1、线性稳定性的分析方法; 2、奇点的判别。 三、教学难点 线性稳定性的分析方法 四、教学方法 讲授并适当运用课件辅助教学 五、教学建议 学习本章内容之前,学生要复习常微分方程的内容。 六、教学过程
本章只介绍一些非常初步的动力学分析方法,但这些方法在应用上是十分有效的。 1.1相空间和稳定性 一、动力系统 在物理学中,首先根据我们面对要解决的问题划定系统,即系统由哪些要素组成。再根据研究对象和研究目的,按一定原则从众多的要素中选出最本质要素作为状态变量。然后再根据一些原理或定律建立控制这些状态变量的微分方程,这些微分方程构成的方程组通常称为动力系统。研究这些微分方程的解及其稳定性以及其他性质的学问称为动力学。 假定一个系统由n 个状态变量1x ,2x ,…n x 来描述。有时,每个状态变量不但是时间t 的函数而且也是空间位置r 的函数。如果状态变量与时空变量都有关,那么控制它们变化的方程组称为偏微分方程组。这里假定状态变量只与时间t 有关,即X i =X i (t),则控制它们的方程组为常微分方程组。 ),,,(2111 n X X X f dt dX ???=λ ),,,(2122 n X X X f dt dX ???=λ (1.1.1) … ),,,(21n n n X X X f dt dX ???=λ 其中λ代表某一控制参数。对于较复杂的问题来说,i f (i =l ,2,…n)一般是{}i X 的非线性函数,这时方程(1.1.1)就称为非线性动力系统。由于{}i f 不明显地依赖时间t ,故称方程组(1.1.1)为自治动力系统。若{}i f 明显地依赖时间t ,则称方程组(1.1.1)为非自治动力系统。非自治动力系统可化为自治动力系统。 对于非自治动力系统,总可以化成自治动力系统。 例如:)cos(t A x x ω=+
釜七届全国非线性动力学学术会议和第九届全国非线性振动学术会议论文集南京,200410.28-29复杂非线性系统的一些动力学与控制问题。 陆启韶王士敏 f北京航空航天大学理学院北京10083) E-mail:qishaolu(岔hotraail.eom 摘要本文根据非线性动力学的研究现状和发展趋势,对复杂非线性系统动力学与控制的理论和应用研究中的一些重要问题进行探讨和展望 关键词非线性,复杂系统,动力学,控制 前言 非线性动力学研究非线性系统丰富的运动模式和演化过程,是非线性科学技术的重要理论基础。非线性动力学研究的最终目的在于深刻揭示非线性世界的复杂性和多样性。非线性系统运动的复杂性来源于多个方面,例如几何关系、本构关系、约束条件、拓扑结构、激励因素、耦合方式、时空尺度、演化机理等,它们都会带来复杂的运动模式。30多年来,尽管非线性动力学对单自由度简单振动系统和低维映射系统的研究已经取得一系列重要成果,发现了大量新的非线性现象。提出并发展了基本的理论方法,但是面对在理论和应用研究中遇到的高维复杂系统问题往往束手无策,仍然缺乏有效的分析策略和手段。因此,复杂非线性系统研究已成为当务之急。 本文根据当前非线性动力学的研究现状和发展趋势,针对复杂非线性系统动力学与控制的理论和应用研究中的一些重要问题进行探讨和展望,希望引起同行关注,共同开创该方面研究的新局面。1.多自由度非线性系统组合振动、全局分析和同步实际非线性振动系统通常是多自由度的,且存在多种外界激励,因此组合振动和模态相互作用是普遍的重要现象。对单自由度系统来说,组合共振只能在多种激励并存的情形下出现。但是对多自由度系统,由于可以存在内共振和自参数共振机理,因 ’国家自然科学基金(10172011)资助项目此在单个激励作用下也可能发生组合共振。内共振(或自参数共振)发生在其线性化系统的各模态的固有频率可以通约或接近通约的情况,其类型依赖于非线性项形式和相应的分岔类型。在没有内共振时,系统的共振响应只包含由外部激励直接激发的主共振或亚,超谐共振模态。但是内共振会引起与非线性项有关的间接激发模态,并导致多模态相互作用,产生诸如饱和、跳跃、锁相、周期调制、混沌调制等复杂现象,造成弹性结构中由高频激励引起的低频大幅共振事故。现在对多自由度系统的组合振动和模态相互作用动力学研究已经取得一些重要成果,并且扩展到梁、板、壳、弦线、悬索、传送带、流一固耦合结构等系统,涉及不同的本构关系(包括粘弹性材料、复合材料、智能材料等)、约束条件和控制方式,成为十分活跃的研究方向。但是,目前这方面的研究主要局限于具体问题,对于组合振动的一般规律和分析方法仍有待于深入探讨。 高维非线性振动系统的全局动力学分析是十分重要且难度很大的问题。目前仍然主要依靠数值模拟手段.成功地用于全局分析的理论方法不多,主要是高维Melnikov方法和Shilnikov方法。近年来,人们发现了大重新的非线性动力学现象,除了混沌激变、瞬态混沌、奇怪混沌不变集之外,还有超混沌、Wada吸引域、筛形吸引域、混沌鞍等,需要从机理上予以明确阐述。因此,当务之急是将动力系统理论、强非线性系统
非线性动力学和混沌理论 非线性动力学 随着科学技术的发展,非线性问题出现在许多学科之中,传统的线性化方法已不能满足解决非线性问题的要求,非线性动力学也就由此产生。 非线性动力学联系到许多学科,如力学、数学、物理学、化学,甚至某些社会科学等。非线性动力学的三个主要方面:分叉、混沌和孤立子。事实上,这不是三个孤立的方面。混沌是一种分叉过程,孤立子有时也可以和同宿轨或异宿轨相联系,同宿轨和异宿轨是分叉研究中的两种主要对象。 经过多年的发展,非线性动力学已发展出了许多分支。如分叉、混沌、孤立子和符号动力学等。然而,不同的分支之间又不是完全孤立的。非线性动力学问题的解析解是很难求出的。因此,直接分析非线性动力学问题解的行为(尤其是长时期行为)成为研究非线性动力学问题的一种必然手段。 混沌理论是谁提出的? 混沌理论,是系统从有序突然变为无序状态的一种演化理论,是对确定性系统中出现的内在“随机过程”形成的途径、机制的研讨。 美国数学家约克与他的研究生李天岩在1975年的论文“周期3则乱七八糟(Chaos)”中首先引入了“混沌”这个名称。 美国气象学家洛伦茨在2O世纪 6O年代初研究天气预报中大气流动问题时,揭示出混沌现象具有不可预言性和对初始条件的极端敏感依赖性这两个基本特点,同时他还发现表面上看起来杂乱无章的混沌,仍然有某种条理性。 1971年法国科学家罗尔和托根斯从数学观点提出纳维-斯托克司方程出现湍流解的机制,揭示了准周期进入湍流的道路,首次揭示了相空间中存在奇异吸引子,这是现代科学最有力的发现之一。 1976年美国生物学家梅在对季节性繁殖的昆虫的年虫口的模拟研究中首次揭示了通过倍周期分岔达到混沌这一途径。 1978年,美国物理学家费根鲍姆重新对梅的虫口模型进行计算机数值实验时,发现了称之为费根鲍姆常数的两个常数。这就引起了数学物理界的广泛关注。 与此同时,曼德尔布罗特用分形几何来描述一大类复杂无规则的几何对象,使奇异吸引子具有分数维,推进了混沌理论的研究。20世纪70年代后期科学家们在许多确定性系统中发现混沌现象。作为一门学科的混沌学目前正处在研讨之中,未形成一个完整的成熟理论。混沌的理论 要弄明白不可预言性如何可以与确定论相调和,可以来看看一个比整个宇宙次要得多的系统——水龙头滴下的水滴。这是一个确定性系统,原则上流入水龙头中的水的流量是平稳、均匀的,水流出时发生的情况完全由流体运动定律规定。但一个简单而有效的实验证明,这一显然确定性的系统可以产生不可预言的行为。这使我们产生某种数学的“横向思维”,它向我们解释了为什么此种怪事是可能的。 假如你很小心地打开水龙头,等上几秒钟,待流速稳定下来,通常会产生一系列规则的水滴,这些水滴以规则的节律、相同的时间间隔落下。很难找到比这更可预言的东西了。但假如你缓缓打开水龙头,使水流量增大,并调节水龙头,使一连串水滴以很不规则的方式滴落,这种滴落方式似乎是随机的。只要做几次实验就会成功。实验时均匀地转动水龙头,别把龙头开大到让水成了不间断的水流,你需要的是中速滴流。如果你调节得合适,就可以在好多分钟内听不出任何明显的模式出现。 1978年,加利福尼亚大学圣克鲁斯分校的一群年青的研究生组成了一个研究动力学系统的小组。他们开始考虑水滴系统的时候,就认识到它并不像表现出来的那样毫无规则。他们用话筒记录水滴的声音,分析每一滴水与下一滴水之间的间隔序列。他们所发现的是短期的可预言性。要是我告诉你3个相继水滴的滴落时刻,你会预言下一滴水何时落下。例如,假如水滴之间最近3个间隔是0.63秒、1.17秒和0.44秒,则你可以肯定下一滴水将在0.82秒后落下这些数只是为了便于说明问题。事实上,如果你精确地知道头3滴水的滴落时刻,你就可以预言系统的全部未来。 那么,拉普拉斯为什么错了? 问题在于,我们永远不能精确地测量系统的初始状态。我们在任何物理系统中所作出的最精确的测量,对大约10位或12位小数来说是正确的。 但拉普拉斯的陈述只有在我们使测量达到无限精度即无限多位小数,当然那是办不到的时才正确。 在拉普拉斯时代,人们就已知道这一测量误差问题,但一般认为,只要作出初始测量,比如小数点后10位,所有相继的预言也将精确到小数点后10位。误差既不消失,也不放大。 不幸的是,误差确实放大,这使我们不能把一系列短期预言串在一起,得到一个长期有效的预言。例如,假设我知道精确到小数点后10位的头3滴水的滴落时刻,那么我可以精确到小数点后9位预言下一滴的滴落时刻,再下一滴精确到8位,以此类推。 误差在每一步将近放大10倍,于是我对进一步的小数位丧失信心。所以,向未来走10步,我对下一滴水的滴落时刻就一无所知
时间序列分析读书报告与数据分析 刘愉 200921210001 时间序列分析是利用观测数据建模,揭示系统规律,预测系统演化的方法。根据系统是否线性,时间序列分析的方法可分为线性时间序列分析和非线性时间序列分析。 一、 时间序列分析涉及的基本概念 1、 测量 对于一个动力系统,我们可以用方程表示其对应的模型,如有限差分方程、微分方程等。如果用t X 或)(t X 表示所关心系统变量的列向量,则系统的变化规律可表示成 )(1t t X f X =+或)(X F dt dX = 其中X 可以是单变量,也可以是向量,F 是函数向量。通过这类方程,我们可以研究系统的演化,如固定点、周期、混沌等。 在实际研究中,很多时候并不确定研究对象数据何种模型,我们得到的是某类模型(用t X 或)(t X 表示)的若干观测值(用t D 或)(t D 表示),构成观测的某个时间序列,我们要做的是根据一系列观测的数据,探索系统的演化规律,预测未来时间的数据或系统状态。 2、 噪声 测量值和系统真实值之间不可避免的存在一些误差,称为测量误差。其来源主要有三个方面:系统偏差(测量过程中的偏差,如指标定义是否准确反映了关心的变量)、测量误差(测量过程中数据的随机波动)和动态噪音(外界的干扰等)。 高斯白噪声是一类非常常见且经典的噪声。所谓白噪声是指任意时刻的噪声水平完全独立于其他时刻噪声。高斯白噪声即分布服从高斯分布的白噪声。这类噪声实际体现了观测数据在理论值(或真实值)周围的随机游走,它可以被如下概率分布刻画: dx M x dx x p 2222)(exp 21 )(σπσ--= (1) 其中M 和σ均为常数,分别代表均值和标准差。 3、 均值和标准差 最简单常用的描述时间序列的方法是用均值和标准差表示序列的整体水平和波动情况。 (1)均值 如果M 是系统真实的平均水平,我们用观测的时间序列估计M 的真实水平方法是:认为N 个采样值的水平是系统水平的真实反映,那么最能代表这些观测值(离所有观测值最近)的est M 即可作为M 的估计。于是定义t D 与est M 的偏离为2 )(est t M D -,所以,使下面E 最小的M 的估计值即为所求: 21)(∑=-=N t est t M D E (2)
第32卷 第8期 岩 土 工 程 学 报 Vol.32 No.8 2010年8月 Chinese Journal of Geotechnical Engineering Aug. 2010 土的非线性动剪切模量比和阻尼比不确定性分析 孙 锐1,3,陈红娟2,袁晓铭1 (1. 中国地震局工程力学研究所,黑龙江 哈尔滨150080;2. 北京工业大学建筑工程学院,北京100124; 3. 哈尔滨工程大学,黑龙江 哈尔滨 150001) 摘要:利用实验资料研究了中国常规土类动剪切模量比及阻尼比随剪应变变化非线性关系的不确定性问题,包括典型应变下分布形态、概率统计指标以及不同概率水准下变化范围和规律。以中国17个省份42个城市和地区588组土样实验为基础数据,对8个典型剪应变进行的动剪切模量比及阻尼比不确定性的概率进行分析,结果表明:常规土类动剪切模量比和阻尼比的变异性以偏态分布为主,其概率统计指标呈现良好规律;各种土类动剪切模量比及阻尼比的标准差和变异系数都很大,而标准差最大值恰出现在土层地震反应计算的敏感区间内;各种土类动剪切模量比及阻尼比的外包线与其95%参考值都有较大差别,体现了实验结果显著的离散性;动剪切模量比的变异系数随剪应变而明显增大,阻尼比的变异系数随剪应变的增大而显著减小;大应变时动剪切模量比不确定性大,而小应变时阻尼比离散显著;阻尼比的变异系数要明显大于动剪切模量比的变异系数,表明阻尼比具有更大的不确定性。 关键词:常规土;动剪切模量比;动阻尼比;不确定性 中图分类号:TU43 文献标识码:A 文章编号:1000–4548(2010)08–1228–08 作者简介:孙 锐(1972– ),女,研究员,从事土动力学研究。E-mail: iemsr@https://www.doczj.com/doc/da174758.html,。 Uncertainty of non-linear dynamic shear modular ratio and damping ratio of soils SUN Rui1,3,CHEN Hong-juan2,YUAN Xiao-ming1 (1. Institution of Engineering Mechanics, CEA, Harbin 150080, China; 2. College of Architecture and Civil Engineering, Beijing University of Technology, Beijing 100124, China; 3. Harbin Engineering University, Harbin 150001, China) Abstract:By using the test data, the uncertainty of the dynamic modular ratio G/G max and damping ratio λversus dynamic shear strain γfor the conventional soils in China is studied. The characteristics of the uncertainty distribution, the probability indexes as well as the range of G/G max and λfor the typical strains under different probabilities are presented. Based on 588 groups of test results from 42 cities and districts in 17 provinces in China, the uncertainty of the modular ratio and damping ratio versus 8 typical shear strains is analyzed. The results indicate that most of the uncertainty distribution of G/G max and λis abnormal and that the statistic indexes for the probability are regular. The standard deviation and the variation coefficient of G/G max and λare both significant, and meanwhile the maximum of the standard deviation just appears in the sensitive range for the seismic analysis of soil layers. The 95% reference values of G/G max and λare quite different from the envelopes of G/G max and λ for all types of soils. The variation coefficients of G/G max increase with the increase of the shear strain, but the variation coefficients of λdecrease with the increase of the shear strain. The uncertainty of G/G max is obvious at the large strain, while that of λis obvious at the small strain. The variation coefficients of λare larger than those of G/G max, indicating the uncertainty of the dynamic damping is more remarkable than the dynamic modulus. Key words:soil; dynamic shear modular ratio; dynamic damping ratio; uncertainty 0 引 言 岩土工程的可靠性分析中,土性参数的概率统计分析是基本内容之一,结果的可信性直接影响到可靠度指标的求解结果[1]。 岩土材料最重要的特征是具有复杂的变异性和参数的不确定性,从而使可靠度分析的精度在很大程度上依赖于岩土参数统计的结果。同时,土性指标的不确定性在概率设计方法中的影响远远超过计算方法的不确定性影响[2]。因此,岩土参数不确定性的研究具有重要的理论意义和工程应用价值。 ─────── 基金项目:中央级公益性研究所基本科研业务费专项项目(2009B01); 黑龙江省自然科学基金项目(E200603);国家科技支撑计划项目(2006BAC13B01) 收稿日期:2009–04–29
《从非线性动力学到复杂系统》 段法兵 系统理论博士生课程
第一讲动态系统的发展 系统是一些相互关联的客体组成的集合,动态(动力dynamical)系统是系统状态变量,比如温度、位移、价格、信号幅值等,随着时间变化的。它的描述可以用微分方程或者离散方程。 微分方程历史悠久,可追溯到牛顿、伽利略、欧拉、雅克比等人,用以描述行星的运动轨迹。研究中发现即使满足牛顿引力定律的三体运动也非常复杂,其微分方程是非线性的,非线性是指不满足叠加定律的方程,解无法利用已知函数进行描述,如果能够描述的我们称为显式解。因此,庞加莱在1880年-1910年期间,试图利用解的拓扑几何性质来解释动态系统的运动规律,发现即使确定性系统,其运动规律也会出现随机性态,非常复杂(确定性系统是指其外力是确定的不随机,只要知道初始条件和演化方程,其运动是可预先确定的)。 非线性系统运动的复杂性:李雅普诺夫研究了系统平衡点?的稳定性?问题,随后本迪尔松等发现系统的解包含(1)平衡态(静止不动);(2)周期运动(比如行星)(3)拟周期,就是几个频率不可公约周期之和。 接着1975年Li和Yorke提出了混沌的概念,即系统的解是非周期的一种类似随机运动的现象,这其中就包含了洛伦兹提出的“蝴蝶效应”,根源在于这类非线性动力系统对于初始条件的极其敏感性,初始条件的微小变化导致了系统状态的巨大改变,从此有关非线性科学的发展异常迅速,形成了现代动力学理论,其最重要的贡献是揭示了一个简单的模型可能蕴含了无比复杂的动力学性态。 例子:Van der Pol(范德波尔)方程 1920年Van der Pol利用电子震荡管研究心脏的跳动问题,比如人工心脏起
二维logistic离散动力系统的参数分析 【摘要】提出了一种二维logistic离散动力系统,讨论了系统参数对系统基本动力行为的影响,得到了相关的定理。同时对系统的分叉进行了分析,并通过数值示例进行仿真,对文中论述进行了强有力的验证。 【关键词】logistic映射;混沌系统;超浑沌系统;分叉 1. 引言非线性动力系统大体分为连续系统和离散系统两大类,连续系统可以根据庞克莱截面方法转换为离散系统,所以对离散混沌系统的控制问题进行研究具有普遍意义。Logistic映射[1-3]是1976年由数学生态学家R. May在英国《自然》杂志上发表的一篇后来影响深广的综述中提出的,后来经过Feigenbaum的出色研究,得出系统一旦发生倍周期分岔[4-9],必然导致混沌现象的产生。对于一维Logistic映射及其推广的形式,研究的比较早也比较详细。但是一维Logistic 映射仅有一个自由度,利用它只能产生一条直线或者曲线,为了绘制一幅图像,至少需要两个及两个以上的自由度,为此就需要构造二维及更高维的系统,分析图形与吸引子的结构特征,探讨了图形与吸引子之间的联系等。文献[4,,5]对一类三维混沌系统研究了它的hopf分叉,文献[7]对同类的共轭lorenz系统进行了控制,文献[6]对一类耦合Logistic离散动力系统进行了动力学分析,研究了相应的分叉值等。在此基础上,本文对二维Logistic离散动力系统[6]。 xn+1=axn(1-λxn) yn+1=(b+cxn)yn(1-λyn)(1) 进行了参数动力学分析,并对通过计算机对系统的在不同参数下的分叉作了仿真。 2. 参数分析系统(1)的Jacobian矩阵为 J(x,y)=a(1-2λx)0 cy(1-λy)(b+cx)(1-2λy)(2) 由于(2)式是对角的,所以可以给出Lyapunov指数为 定理1 n∈N ,当a∈[0,4λ],x0∈[0,a4λ] ,则xn∈[0,a4λ] 定理2 n∈N ,当a∈[0,4λ] ,x0∈[0,a4λ] ,y0 ∈[0,4λb+ac16λ2],b ∈[0,4λ-ac4λ], c ∈[0,16λ2a],则yn∈[0,4λb+ac16λ2] 证明:当n=0 时,0≤y0 ≤4λb+ac16λ2,假设当n=k 时,有0≤yk ≤4λb+ac16λ2 ,下证当n=k+1 时,有0≤yk+1 ≤ 4λb+ac16λ2 因为16λ24λb+ac(b+cxk)yk(4λb+ac16λ2-yk)≥0,所以(b+cxk)yk(1- 16λ24λb+acyk)≥0,又因为00,e2 3.5699457,b=3.5 ,c=0.5 时,x和y都达到浑沌状态,即系统为超浑沌系统。从图3,图6中更能看到当a>3.5699457 ,b=4 ,c=-1 时,系统亦为超浑沌系统。 4. 结论本文在经典logistic映射的基础上,提出了一种二维logistic离散动力系统,通过对系统参数变化的讨论,得到了有关系统基本动力行为随参数变化而被影响的几个定理。同时对该离散系统的分叉进行了分析,并通过数值示例进行仿真,对文中论述进行了强有力的验证。
非线性动力学 非线性系统之一瞥——Lorenz系统 2013-01-30
0 前言 0.1非线性系统动力学 线性系统是状态变量和输出变量对于所有可能的输入变量和初始状态都满足叠加原理的系统;非线性系统就是这些量不满足叠加原理的系统。非线性系统在日常生活和自然界中不胜枚举,也远远多于线性系统。 非线性动力学是研究非线性系统的各种运动状态的定性和定量变化规律,尤其是系统的长时期行为。研究的对象主要有分叉、混沌和孤立子等。 0.2洛伦兹方程 洛伦兹方程是美国气象学家洛伦兹在模拟天气这一非周期性现象时确定,这个方程的三个变量分别模拟温度、湿度和压力。可以得出结论,初期微小的差别随着时间推移差别会越来越大,洛伦兹基于此提出长期的天气预报是不可能的。这也被视为研究非线性混沌理论的开始,所以洛伦兹系统在研究非线性系统中具有举足轻重的地位。本文借助洛伦兹系统对非线性进行简单的介绍。洛伦兹方程如下。 方程中,、和都为实参数。实参不同,系统的奇点及数目也是不同的。
1 奇点和稳定性 1.1 奇点 洛伦兹系统含有三个实参数,当参数变化,奇点的数目可能不同。首先,一定是系统的奇点。时,当时,系统仅有一个奇点;当时,系统还有另外两个奇点。 下面仅解时的两个非原点奇点。令 方程第一式得,第三式可得,将两式代入第二式得 即,。 1.2 奇点稳定性判别 下面根据Liapunov稳定性判别方法,找出系统在原点处大围渐进稳定的条件,取Liapunov函数。考虑,的情况。则有 将洛伦兹方程 代入上式,可得 变换为二次型,系数矩阵为
已知,,则系数矩阵负定的条件是。所以该系统是大围渐进稳定的条件是,前提是,。 Liapunov函数V总是存在的,只要构造出合适的Liapunov函数,就可以通过Liapunov稳定性定理直接判断奇点的稳定性,而不需要求解非线性方程组。有的Liapunov函数不易构造,则可以通过奇点处导算子的特征值来判断:若所有的特征值实部都小于0,则方程组在该奇点是局部渐进稳定的;若特征值实部至少有一个为正,该奇点是不稳定的。仍以洛伦兹系统为例,求出导算子的特征值。 特征矩阵的行列式(特征方程)为 特征值 显然,当,时,,,要使方程在原点处渐进稳定,必须小于0,因此 两边同时平方可得 因此
第一章非线性动力学分析方法(6学时) 一、教学目标 1、理解动力系统、相空间、稳定性得概念; 2、掌握线性稳定性得分析方法; ?3、掌握奇点得分类及判别条件; ?4、理解结构稳定性及分支现象; 5、能分析简单动力系统得奇点类型及分支现象. 二、教学重点 1、线性稳定性得分析方法; ?2、奇点得判别。 三、教学难点 ?线性稳定性得分析方法 四、教学方法 讲授并适当运用课件辅助教学 五、教学建议 ?学习本章内容之前,学生要复习常微分方程得内容。 六、教学过程 本章只介绍一些非常初步得动力学分析方法,但这些方法在应用上就是十分有效得。 1、1相空间与稳定性 ?一、动力系统 在物理学中,首先根据我们面对要解决得问题划定系统,即系统由哪些要素组成。再根据研究对象与研究目得,按一定原则从众多得要素中选出最本质要素作为状态变量。然后再根据一些原理或定律建立控制这些状态变量得微分方程,这些微分方程构成得方程组通常称为动力系统。研究这些微分方程得解及其稳定性以及其她性质得学问称为动力学. 假定一个系统由n个状态变量,,…来描述。有时,每个状态变量不但就是时间t得函数而且也就是空间位置得函数。如果状态变量与时空变量都有关,那么控制它们变化得方
程组称为偏微分方程组.这里假定状态变量只与时间t有关,即X =X i(t),则控制它们 i 得方程组为常微分方程组。 ?????(1。1.1) … 其中代表某一控制参数.对于较复杂得问题来说,(i=l,2,…n)一般就是得非线性函数,这时方程(1.1.1)就称为非线性动力系统。由于不明显地依赖时间t,故称方程组(1。1.1)为自治动力系统。若明显地依赖时间t,则称方程组(1、1、1)为非自治动力系统.非自治动力系统可化为自治动力系统. 对于非自治动力系统,总可以化成自治动力系统。 例如: 令,,上式化为 上式则就是一个三维自治动力系统。 又如: 令,则化为 它就就是三微自治动力系统、 对于常微分方程来说,只要给定初始条件方程就能求解。对于偏微分方程,不但要给定初始条件而且还要给定边界条件方程才能求解。 能严格求出解析解得非线性微分方程组就是极少得,大多数只能求数值解或近似解析解。 二、相空间 ,X2,…Xn)描述得系统,可以用这n个状态变量为坐标轴支由n个状态变量=(X 1 起一个n维空间,这个n维空间就称为系统得相空间。在t时刻,每个状态变量都有一个确定得值,这些值决定了相空间得一个点,这个点称为系统状态得代表点(相点),即它代表了系统t时刻得状态。随着时间得流逝,代表点在相空间划出一条曲线,这样曲线称为相轨道或轨线.它代表了系统状态得演化过程。 三、稳定性 把方程组(1。1.1)简写如下
基于ADAMS软件进行动态仿真分析的一般方法和过程 摘要: 本文通过对相关资料的总结归纳,介绍了虚拟样机的发展现况、ADAMS软件、特点以及利用其进行动态仿真的一般方法和过程。并结合多功能开沟机液压系统进行了建模与仿真分析。 关键词:仿真 ADAMS 优化虚拟样机 1、前言 随着近代科学技术的发展,工程设计的理论、方法和手段都发生了很大的变化。从计算机辅助工程(CAE)的广泛应用,到并行工程(CE)思想的提出与推行,从根本上改变了传统的设计方法,极大地促进了制造业的发展和革命。但与此同时,人们已清楚地认识到:即使系统中的每个零部件都是经过优化的,也不能保证整个系统的性能是良好的,即系统级的优化绝不是系统中各部件优化的简单叠加。于是,由CAX/DFX等技术发展而来,以系统建模、仿真技术为核心的虚拟样机技术(Virtual Prototyping)得到了迅速发展,并正成为各国纷纷研究的新的热点。 虚拟样机技术(Virtual Prototyping Technology)是当前设计制造领域的一项新技术,其应用涉及到汽车制造、工程机械、航空航天、造船、航海、机械电子、通用机械等众多领域。它利用计算机软件建立机械系统的三维实体模型和运动学及动力学模型,分析和评估机械系统的性能,从而为机械产品的设计和制造提供依据。虚拟样机技术可使产品设计人员在各种虚拟环境中真实地模拟产品整体的运动及受力情况,快速分析多种设计方案,进行物理样机而言难以进行或根本无法进行的试验,直到获得系统的最佳设计方案为止。虚拟样机技术的应用贯穿着整个设计过程中,它可以用在概念设计和方案论证中,设计者可以把自己的经验与想象结合在虚拟样机里,让想象力和创造力得到充分地发挥。用虚拟样机替代物理样机,不但可以缩短开发周期而且设计效率也得到了很大的提高。本文以ADAMS为平台,简单说明一下进行虚拟样机的动态仿真分析的一般方法和过程。 2、ADAMS软件简介及特点 ADAMS(Automatic Dynamic Analysis of Mechanical System)软件,是由美国机械动力公司(Mechanical Dynamics Inc,现已经并入美国MSC公司)开发的最优秀的机械系统动态仿真软件,是目前世界上最具权威性的,使用范围最广的机械系统动力学分析软件,在全球占有率最高。ADAMS软件可以广泛应用于航空航天、汽车工程、铁路车辆及装备、工业机械、工程机械等领域。国外的一些著名大学也开设了介绍ADAMS软件的课程,而将三维CAD软件、有限元软件和虚拟样机软件作为机械专业学生必须了解的工具软件。ADAMS 一方面是机械系统动态仿真软件的应用软件,用户可以运用该软件非常方便地对虚拟样机进行静力学、运动学和动力学分析;另一方面,又是机械系统动态仿真分析开发工具,其开放性的程序结构和多种接口,可以成为特殊行业用户进行特殊类型机械系统动态仿真分析的二次开发工具平台。ADAMS与先进的CAD软件(UG、Pro/ENGINEER)以及CAE软件(ANSYS)可以通过计算机图形交换格式文件相互交换以保持数据的一致性。ADAMS软件支持并行工程环境,节省大量的时间和经费。利用ADAMS软件建立参数化模型可以进行设计研究,试验设计和优化分析,为系统参数化提供了一种高效开发工具。 应用ADAMS进行动态仿真设计的过程如图1所示。
即non-linear 是指输出输入既不是正比例也不是反比例的情形。如宇宙形成初的混沌状态。 自变量与变量之间不成线性关系,成曲线或抛物线关系或不能定量,这种关系叫非线性关系。 “线性”与“非线性”,常用于区别函数y = f (x)对自变量x的依赖关系。线性函数即一次函数,其图像为一条直线。其它函数则为非线性函数,其图像不是直线。 线性,指量与量之间按比例、成直线的关系,在空间和时间上代表规则和光滑的运动;而非线性则指不按比例、不成直线的关系,代表不规则的运动和突变。如问:两个眼睛的视敏度是一个眼睛的几倍?很容易想到的是两倍,可实际是 6-10倍!这就是非线性:1+1不等于2。 非线性关系虽然千变万化,但还是具有某些不同于线性关系的共性。 线性关系是互不相干的独立关系,而非线性则是相互作用,而正是这种相互作用,使得整体不再是简单地等于部分之和,而可能出现不同于"线性叠加"的增益或亏损。 激光的生成就是非线性的!当外加电压较小时,激光器犹如普通电灯,光向四面八方散射;而当外加电压达到某一定值时,会突然出现一种全新现象:受激原子好像听到“向右看齐”的命令,发射出相位和方向都一致的单色光,就是激光。 迄今为止,对非线性的概念、非线性的性质,并没有清晰的、完整的认识,对其哲学意义也没有充分地开掘。 线性:从相互关联的两个角度来界定,其一:叠加原理成立;其二:物理变量间的函数关系是直线,变量间的变化率是恒量。 在明确了线性的含义后,相应地非线性概念就易于界定: 其—,“定义非线性算符N(φ)为对一些a、b或φ、ψ不满足L(aφ+bψ)=aL(φ)+bL(ψ)的算符”,即叠加原理不成立,这意味着φ与ψ间存在着耦合,对(aφ+bψ)的*作,等于分别对φ和ψ*作外,再加上对φ与ψ的交叉项(耦合项)的*作,或者φ、ψ是不连续(有突变或断裂)、不可微(有折点)的。 其二,作为等价的另—种表述,我们可以从另一个角度来理解非线性:在用于描述—个系统的一套确定的物理变量中,一个系统的—个变量最初的变化所造成的此变量或其它变量的相应变化是不成比例的,换言之,变量间的变化率不是恒量,函数的斜率在其定义域中有不存在或不相等的地方,概括地说,就是物理变量间的一级增量关系在变量的定义域内是不对称的。可以说,这种对称破缺是非线性关系的最基本的体现,也是非线性系统复杂性的根源。 对非线性概念的这两种表述实际上是等价的,其—叠加原理不成立必将导致其二物理变量关系不对称;反之,如果物理变量关系不对称,那么叠加原理将不成立。之所以采用了两种表述,是因为在不同的场合,对于不同的对象,两种表述有各自的方便之处,如前者对于考察系统中整体与部分的关系、微分方程的性质是方便的,后者对于考察特定的变量间的关系(包括变量的时间行为)将是方便的。 非线性的特点是:横断各个专业,渗透各个领域,几乎可以说是:“无处不在时时有。”确实如此。 非线性动力学随着科学技术的发展,非线性问题出现在许多学科之中.传统的线性化方法已不能满足解决非线性问题的要求.非线性动力学也就由此产生. 非线性动力学联系到许多学科,如力学.数学.物理学.化学,甚至某些社会科学等. 非线性动力学的三个主要方面:分叉.混沌和孤立子.事实上,这不是三个孤立的方面.混沌是一种分叉过程.孤立子有时也可以和同宿轨或异宿轨相联系,同宿轨和异宿轨是分叉研究中的两种主要对象. 经过
单摆的非线性动力学分析 亚兵 (交通大学车辆工程专业,,730070) 摘要:研究单摆的运动,从是否有无阻尼和驱动力方面来分析它们对单摆运动的影响。对于小角度单摆的运动,从单摆的动力学方程入手,借助雅普诺夫一次近似理论,推导出单摆的运动稳定性情况。再借助绘图工具matlab,对小角度和大角度单摆的运动进行仿真,通过改变参数,如阻尼大小、驱动力大小等绘出单摆运动的不同相图,对相图进行分析比较,从验证单摆运动的稳定性情况。关键词:单摆;振动;阻尼;驱动力 Abstract:The vibration of simple pendulum is studied by analyzing whether or not damp and drive force its influence of the simple pendulum. For small angle pendulum motion, pendulum dynamic equation from the start, with an approximate Lyapunov theory of stability of motion is derived pendulum situation. Drawing tools with help from matlab, small angle and wide-angle pendulum motion simulation, by changing the parameters, such as damping size, drive size draw simple pendulum of different phase diagram, analysis and comparison of the phase diagram, from the verification the stability of the situation pendulum movement. Key words: simple pendulum; vibration; damp; drive force 1 引言 单摆是一种理想的物理模型[1],单摆作简谐振动(摆角小于5°)时其运动微分方程为线性方程,可以求出其解析解,而当单摆做大幅度摆角运动时,其运动微分方程为非线性方程,我们很难用解析的方法讨论其运动,这个时候可以用MATLAB软件对单摆的运动进行数值求解,并可以模拟不同情况下单摆的运动。 θ=时, 随着摆角的减小,摆球的运动速率将越来越大,而加速度将单调下降,至0 加速度取极小值。本文从动力学的角度详细考察了这一过程中摆球的非线性运,得出了在运动过程中.,t θθθ --的关系。
非线性力学和混沌简介 非线性科学是一门研究非线性现象共性的基础学科。它是自本世纪六十年代以来,在各门以非线性为特征的分支学科的基础上逐步发展起来的综合性学科,被誉为本世纪自然科学的“第三次革命”。非线性科学几乎涉及了自然科学和社会科学的各个领域,并正在改变人们对现实世界的传统看法。科学界认为:非线性科学的研究不仅具有重大的科学意义,而且对国计民生的决策和人类生存环境的利用也具有实际意义。由非线性科学所引起的对确定论和随机论、有序与无序、偶然性与必然性等范畴和概念的重新认识,形成了一种新的自然观,将深刻地影响人类的思维方法,并涉及现代科学的逻辑体系的根本性问题。 一线性与非线性的意义 线性”与“非线性”是两个数学名词。所谓“线性”是指两个量之间所存在的正比关系。若在直角坐标系上画出来,则是一条直线。由线性函数关系描述的系统叫线性系统。在线性系统中,部分之和等于整体。描述线性系统的方程遵从叠加原理,即方程的不同解加起来仍然是原方程的解。这是线性系统最本质的特征之一。“非线性”是指两个量之间的关系不是“直线”关系,在直角坐标系中呈一条曲。 最简单的非线性函数是一元二次方程即抛物线方程。简单地说,一切不是一次的函数关系,如一切高于一次方的多项式函数关系,都是非
线性的。由非线性函数关系描述的系统称为非线性系统。 线性与非线性的区别 定性地说,线性关系只有一种,而非线性关系则千变万化,不胜枚举。线性是非线性的特例,它是简单的比例关系,各部分的贡献是相互独立的;而非线性是对这种简单关系的偏离,各部分之间彼此影响,发生偶合作用,这是产生非线性问题的复杂性和多样性的根本原因。正因为如此,非线性系统中各种因素的独立性就丧失了:整体不等于部分之和,叠加原理失效,非线性方程的两个解之和不再是原方程的解。因此,对于非线性问题只能具体问题具体分析。 线性与非线性现象的区别一般还有以下特征: (1)在运动形式上,线性现象一般表现为时空中的平滑运动,并可 用性能良好的函数关系表示,而非线性现象则表现为从规则运动向不规则运动的转化和跃变; (2)线性系统对外界影响的响应平缓、光滑,而非线性系统中参数的极微小变动,在一些关节点上,可以引起系统运动形式的定性改变。在自然界和人类社会中大量存在的相互作用都是非线性的,线性作用只不过是非线性作用在一定条件下的近似。 非线性问题研究的历史概况