Abaqus拓扑优化分析手册
13.优化技术
13.1 结构优化:概述
13.1.1 概述
Abaqus结构优化是一个帮助用户精细化设计的迭代模块。结构优化设计能够使得结构组件轻量化,并满足刚度和耐久性要求。Abaqus提供了两种优化方法——拓扑优化和形貌优化。拓扑优化(Topology optimization)通过分析过程中不断修改最初模型中指定优化区域的单元材料性质,有效地从分析的模型中移走单元而获得最优的设计目标。形貌优化(Shape optimization)则是在分析中对指定的优化区域不断移动其表面节点从而达到减小局部应力集中的优化目标。拓扑优化和形貌优化均遵从一系列优化目标和约束。
最优化方法(Optimization)是一个通过自动化程序增加设计者的经验和直觉,从而缩短研发过程的工具。想要优化模型,必须知道如何去优化,仅仅说要减小应力或者增大特征值是不够的,做优化必须有更具体的描述。比方说,想要降低在两种不同载荷工况下(Load Step)的最大节点力,类似的还有,想要最大化前五阶特征值之和。这种最优化的目标称之为目标函数(Object Function)。另外,在优化过程中可以同时强制限定某些状态参量。例如,可以指定某节点的位移不超过一定的数值。这些强制性的指定措施叫做约束(Constraint)。
可以使用Abaqus/CAE创建待优化的模型,然后定义、配置和执行结构优化。更多信息请参考Abaqus/CAE User’s Guide的第十八章“The Optimization module”。
13.1.1.1术语(Terminology)
结构优化拥有它自己的一套术语。以下术语适用于整个Abaqus帮助文档以及Abaqus/CAE用户界面。
设计区域(Design area): 设计区域即模型需要优化的区域。这个区域可以是整个模型,也可以是模型的一部分。一定的边界条件、载荷及人为约束下:
●拓扑优化通过增加/删除区域中的材料达到最优化设计
●形貌优化通过移动区域内的节点来达到优化的目的。
设计变量(Design variables):设计变量即优化设计中需要改变的参数。
拓扑优化中,设计区域中的单元密度是设计变量,Abaqus/CAE优化分析模块在其优化迭代过程中改变单元密度并将其耦合到刚度矩阵之中。实际上,拓扑优化将模型中单元移除的方法是,将单元的质量和刚度充分变小从而使其不再参与整体结构响应。然后Abaqus会重新计算移除材料后的模型的响应。
对于形貌优化而言,设计变量是指设计区域内表面节点的位移。优化时,Abaqus或者将曲面节点位置向外移动(growth)或者向内移动(shrinkage),抑或不移动(neutral)。在此过程中,约束会影响表面节点移动的多少及其方向。优化仅仅直接修改边缘处的节点(Corner nodes),而边缘内侧的节点位移通过边缘处节点插值得到。
设计循环(Design cycle): 优化分析是一种不断更新设计变量的迭代过程,执行Abaqus 进行模型修改、查看结果以及确定是否达到优化目的。其中每次迭代叫做一个设计循环。
优化任务(Optimization task):一次优化任务包含优化的定义,比如设计响应、目标、限制条件和几何约束。
设计响应(Design responses): 优化分析的输入量称之为设计响应。设计响应可以直接从Abaqus的结果输出文件.odb中读取,比如刚度、应力、特征频率及位移等。或者Abaqus 从结果文件中计算得到模型的设计响应,例如质心、重量、相对位移等。
一个设计响应与模型紧密相关,然而,设计响应必须是一个标量,例如区域内的最大应力或者模型体积。另外,设计响应也与特定的分析步和载荷状况有关。
目标函数(Objective functions): 目标函数决定了优化的目标。一个目标函数是从设计响应中提取的一个标量,如最大位移和最大应力。一个目标函数可以用一个包含多个设计响应的公式来表示。如果设定目标函数为最小化或者最大化设计响应,Abaqus拓扑优化模块则将每个设计响应值代入目标函数进行计算。另外,如果有多个目标函数,可以用权重因子定义每个目标函数的影响程度。
约束(Constraints): 约束亦是从设计响应中提取的一个标量值。然而,一个约束不能由设计响应的组合来表达。约束限定了设计响应,比如可以指定体积必须降低45%或者某个区域的位移不能超过1mm。也可以指定跟优化无关的加工约束或者几何约束,比如,一个零件必须保证能够浇铸或者冲压,又比如轴承面的直径不能改变。
停止条件(Stop conditions): 全局停止条件决定了优化的最大迭代次数。局部停止条件在局部最大/最小达成之后指定优化应该停止。
13.1.1.2 Abaqus/CAE结构优化步骤
下面的步骤需要合并到Abaqus/CAE结构优化设计模块中:
1)创建需要优化的Abaqus模型。例如,设计区域必须只能包含优化设计模块支持的单元类型和材料类型。参考13.2.3节“创建Abaqus优化模型”。
2)创建一个优化任务。参考Abaqus/CAE User’s Guide的18.6节“创建并配置优化设计任务”。
3)创建设计响应。参考13.2.1节“设计响应”。
4)利用设计响应创建目标函数和约束。参考13.2.2节“目标函数和约束”。
5)创建优化进程,提交分析。参考Abaqus/CAE User’s Guide的19.5.1节“什么是优化设计的流程?”。
基于优化任务的定义及优化流程,Abaqus/CAE拓扑优化模块进行迭代运算:1)准备设计变量(单元密度或者表面节点位置),并更新Abaqus有限元模型。
2)执行Abaqus/Standard分析。
这些迭代或者设计循环不会停止,除非:
1)最大迭代次数达到
2)指定的停止条件达到。
Figure 1描述了Abaqus优化分析的过程:
Figure 1 在优化流程中的用户行为以及Abaqus/CAE的自动行为
13.1.1.3拓扑优化
拓扑优化开始于包含指定条件(例如边界条件和载荷)的初始设计(原始设计区域)。优化分析过程在符合优化约束(比如最小体积或者最大某区域的位移)的前提下改变初始设计区域的单元密度和刚度从而确定结构新的材料分布方式。
Figure 2展示了汽车控制臂在17次设计循环中拓扑优化的过程,其中优化的目标函数是试图最小化控制臂的最大应变能,最大化控制臂的刚度。约束为降低57%的产品体积。优化过程中,控制臂中部的部分单元的质量和刚度逐渐减小,最终这些单元不断被移除。但是,这些单元仍然存在着,随着优化迭代的不断进行,如果这些单元的质量和刚度逐渐变大了,它们又可以在分析中发挥作用。同时,一个几何上的限制强制要求优化所得到的模型必须能够被浇铸并且能够从铸模中取出——限制了Abaqus不能生成空腔和切口。
Figure 2 一个拓扑优化的基本流程
Abaqus可以应用如下目标到拓扑优化过程中:
1)应变能(结构刚度的度量值)
2)特征频率
3)内力和支反力
4)重量和体积
5)重心
6)惯性矩。
同样地,在拓扑优化流程中,上面这些变量也可以作为约束变量。另外,拓扑优化同样可以考虑加工的约束,使得产品可以使用标准制造过程来生产,例如铸造和冲压。还可以冻结指定区域,应用数量尺寸、对称性及耦合约束。拓扑优化的例子在Abaqus Example Problems Manual的Section11.1.1中。
13.1.1.4通用拓扑优化法VS条件拓扑优化法
拓扑优化支持两种算法——一般算法比较灵活,可以应用到大多数问题中;基于刚度的算法,更为有效,但是应用能力有限。Abaqus默认采用一般算法,但是当创建优化任务的时候可以进行优化算法的选择。每种优化算法达到优化目标的过程是不同的。
算法
通用拓扑优化算法在满足目标函数和约束前提下调整设计区域的单元密度和刚度,可参考Bends?e and Sigmund (2003),文献中有一般算法的部分描述。作为对比,刚度拓扑优化作为一种更为有效的算法,使用了应变能和节点应力作为输入量而且并不需要计算设计变量的
局部刚度。基于刚度的优化算法是德国卡尔斯鲁厄大学(U.Karlsruhe)的Bakhtiary (1996)提出的。
中间密度单元
一般算法导致了设计结果有中间单元(相对密度处于0~1之间的单元)。相反地,基于刚度的优化算法所得结果中的单元不是空材料(密度非常接近0)就是实体(密度非常接近1)。
优化设计循环次数
通用算法需要的循环步在优化计算开始的时候是并不知晓的,但是一般来说,这个步数处于30~45之间。基于刚度的优化算法能够更快地达到优化算法的解(默认15步)。
分析类型
一般优化算法支持线性静力、非线性静力及线性模态分析。两种算法均支持几何非线性和接触,以及很多非线性材料。
此外,静力拓扑优化中可以指定位移约束,而模态分析不可指定位移约束。拓扑优化支持复合材料分析,但每层材料的修改在拓扑优化中是不支持的,如不能指定复合材料纤维走向等。
目标函数和约束
一般优化算法可以使用一个目标函数和数个约束,这些约束可以全部是不等式。多种设计响应可以被定义为目标和约束,例如应变能、位移和旋转、支反力及内力、特征频率和材料的体积及重量。基于条件的拓扑优化算法更为有效,然而适用性比较差,仅支持应变能(一种刚度的度量)作为目标函数,材料体积作为约束方程。
13.1.1.5形貌优化
形貌优化采用了跟基于条件的拓扑优化算法类似的算法。形貌优化一般是对表面节点进行较小的调整以减小局部应力集中。形貌优化用于产品外形需要微调的情况,一般在设计流程的最后进行。形貌优化开始于一个仅需要少量修改的有限元模型或者一个已经经过拓扑优化的有限元模型。
形貌优化的目标是在应力分析的结果基础上通过调整表面几何形貌来最小化局部应力集中,形貌优化试图重置既定区域的表面节点位置直到此区域的应力成为常数(应力均匀)。Figure 3是连杆形貌优化以减小局部应力集中的例子:
Figure 3 形貌优化的结果
形貌优化支持以下目标:
1)应力和接触应力
2)自然频率
3)弹性、塑性、全应变和应变能密度
形貌优化只能应用体积约束,另外,可以使用一定数量的加工几何限制条件使提出的设计能够继续铸造或者冲压。也可以冻结某特定区域、应用数量尺寸、对称性及耦合限制等。
Abaqus案例手册的第11.2.1节提供了一个形貌优化的例子“连杆结构的形貌优化”。
形貌优化的网格光顺
形貌优化过程中,Abaqus/CAE拓扑优化模块修改模型表面。如果拓扑优化模块只对表面节点进行位置调整而不对表层内节点进行调整,单元将会发生扭曲。这样,Abaqus的优化结果将变得不可信,优化的质量也值得怀疑。为了提高表面单元的质量,Abaqus的优化模块可以对指定区域的网格进行光顺,对与该区域表面节点相关联的内部节点位置进行调整。在进行形貌优化之前,一定要保证网格质量足够好,尤其是将要进行形貌优化的区域。
Abaqus/CAE拓扑优化模块可以光顺标准连续单元,比如三角形单元、四边形单元和四面体单元。其他单元类型将不会被光顺化。可以指定光顺单元的单元质量,倾斜角(对于三角形和四边形单元),边长比(对于四面体单元)。这些指标能够衡量单元质量是否足够好。被认为是网格质量较差的单元会给出一个质量评测,质量越差的单元,在改善单元质量时越会被重点关注。
网格光顺化是一个比较耗费计算量的过程。光顺算法是基于单元的,在单元数量很多而自由度有限的区域(比如包含很小四面体单元的区域),其计算时间会大增。因此,可以只对优化区域内的单元指定网格光顺化。网格光顺化的区域节点必须是自由的,不能应用于有约束的节点或者区域,也不能应用于冻结区域。
可以对网格光顺进行限制,指定给定区域的最小增量和最大增量限制。参考
Abaqus/CAE用户手册的18.10.3节以获得更多信息。
网格光顺化可以应用到优化区域也可以应用到非优化区域,尤其是可以用于在优化区域和剩余区域之间来防止网格扭曲,但是优化区域必须包含于网格光顺化指定区域。
自由曲面的节点被定义为设计区域之外的节点,不会被包含在几何限制之内。Abaqus/CAE在网格光顺化中会自动将所有自由表面节点进行约束,在网格光顺中也不会被调整。或者,可以选择让自由曲面节点随着与设计区域节点相邻的几层节点一起移动。(仅在角点处生成每层节点,中间节点不会参与移动。)
可以选择设计区域附近的表层节点进行光顺化移动,从而使得优化区域和非优化设计区域能够更加连续。然而,在某些情形下,可能需要自由曲面节点保持固定,例如,一个不参与优化的平面仍然需要保持平面。
默认的网格光顺化采用强制拉普拉斯网格光顺化算法。但是,如果模型比较小,比如小于1000个节点,可以采用局部梯度化网格光顺算法。在每次运算中,局部梯度化网格光顺算法进行质量不好的单元的辨别,然后通过移动节点对其进行光顺。局部梯度化光顺通常产生具有最佳外形的单元,这种最佳是按照单元体积(对壳单元则是面积)相对于单元直径的关系来定义的。对于较大模型,局部梯度化网格光顺算法一般会在最佳网格质量形成之前停止,这样只有最坏的单元质量得到了光顺。
13.2 优化模型
13.2.1设计响应
13.2.1.1概述
一个设计响应:
1) 是一个标量值,例如结构的体积
2) ATOM 通过Abaqus/CAE 读取odb 文件的结果和模型文件来计算
3) 与目标函数和约束相关联(比如,可以创建一个目标函数来最小化节点位移或
者强制约束降低结构重量50%以上)
4) 必须在一定的分析过程基础上(比如,如果指定最大化某区域最小特征频率为
设计响应,则需要进行提取特征频率的分析)
13.2.1.2响应变量的运算
尽管已有一些限制应用到了响应上,还必须在ATOM 中通过操作来获得设计响应的标量值。例如,一个体积设计响应可以只用于设计区域的体积之和,计算von Mise 应力的设计响应必须是模型中一定区域的应力最大值。如下设计响应操作为Abaqus/CAE 拓扑优化模块(以后简称ATOM )所提供:
● 最小化或者最大化:既定区域的最小值或者最大值。对于应力,接触应力和应变设
计响应,ATOM 仅允许进行最大值操作。
● 求和:既定区域所有值求和值。对体积、重量、惯性矩和重力设计响应的,ATOM
仅允许求和操作。
13.2.1.3基于条件的拓扑优化设计响应
ATOM 提供基于条件的拓扑优化方法以应变能和体积设计响应。
应变能
结构的柔度是结构柔性及刚性的度量,定义为所有单元的应变能之和,在线性模型中表达为t u ku ∑ ,其中u 为位移向量,k 为整体刚度矩阵。柔度与刚度互为倒数,因此最小化柔度等价于最大化整体刚度。如果载荷是集中力或者面力,则必须选择最小化应变能来最大化整体刚度;而如果载荷是热应力场,优化就会在使得结构变软的同时,应变能不断减小,因为降低应变能会导致硬化,所以应该一直选择最大化应变能。另外,如果模型指定了位移约束,则须最大化应变能。
拓扑优化考虑所有单元的总应变能,因此,如果选择应变能作为目标函数,则须将目标应用于整个模型。优化过程中不能使用应变能作为约束。
Abaqus/CAE Usage: Optimization module: Task →condition-based topology task , Design
Response →Create : Single-term , Variable Strain energy
体积
体积是设计区域内所有单元体积之和e V ∑,其中e V 为单元的体积。在拓扑优化过程中,所有单元都根据当前Abaqus 模型的相对密度进行了放缩。对于大多数优化问题,需要给定
一个体积约束。例如,如果试图最小化应变能(最大化刚度),并且没有施加体积约束,则Abaqus会简单地在整个设计区域填充材料。
Abaqus/CAE Usage:Optimization module: Task→condition-based topology task , Design
Response→Create: Single-term, Variable:Volume
13.2.1.4通用拓扑优化的设计响应
ATOM通用拓扑优化算法支持重心、平动、旋转、特征频率、惯性矩、内力、反力、力矩、应变能、体积和重量等作为设计响应。
重心
在优化分析中将指定区域的重心作为一个设计变量,并且可以选择三个主分量:
当ATOM计算重心时,单元会以当前相对密度为计算依据。
举例说明,当需要约束Y方向的重心在某个范围内的时候,这即为一个重心优化问题。设计响应会考虑整个模型或者指定区域的重心位置。可以将整个模型的重心或者局部区域的重心作为设计响应。
如果使用了局部坐标系,ATOM会根据坐标轴和原点重新计算重心。如果不选择使用局部坐标系,ATOM将使用整体坐标系。
壳体及膜区域的重心在ATOM中是在考虑其厚度后作为三维区域处理的。ATOM只能对拓扑优化支持的单元类型计算重心。因此,ATOM计算得到的重心跟Abaqus/Stardard和Abaqus/Explicit不同,例如,ATOM不会考虑线区域。
Abaqus/CAE Usage:Optimization module: Task→general topology task, Design Response
→Create: Single-term, Variable:Center of gravity
平动和转动
在大多数优化问题中需要使用位移或者转动去定义目标函数或者约束。例如,一个顶点的最大位移既可以作为设计响应,也可以作为约束。如果仅仅应用位移或者转动约束到某些顶点或者小区域,则优化性能会得到改善。另外,如果指定具有位移约束的区域为冻结区域,同样会加快优化的进程。
下表提供了可用的位移和转动变量:
Abaqus/CAE
Usage Optimization module: Task→general topology task, Design Response→Create: Single-term, Variable: Displacement
模态特征频率分析
模态特征值是结构分析中最简单的动力响应。特征频率数据在拓扑优化过程中通常的用途包括如下几种:
●最大化最低阶特征频率,
●最大化选定的特征频率,
●限定某特征频率高于或低于一给定值,
●最大化或最小化某模态下的特征频率,
●采用带隙(bandgap)优化迫使模态远离某频率。
ATOM支持两种方式来评估特征频率:
●模态分析中得到的单一特征频率,
●Kreisselmaier-Steinhauser方程。
Kreisselmaier-Steinhauser方程是两种方法中最有效的,并且应该优先使用。评估单一特征频率的唯一好处就是可以将特征频率的总和作为约束条件,Kreisselmaier-Steinhauser 公式则不能。
当尝试最大化最低阶固有频率时,在此推荐除了考虑第一阶特征频率,还至少要考虑之后两阶模态的固有频率。在优化过程中,很多固有频率根据它们到最低阶频率的距离进行加权——越接近第一阶固有频率,权重越大。如果是尝试最大化最小特征频率或者最大化最小的几阶特征频率时,应该使用Kreisselmaier-Steinhauser 特征值方程。如果使用了Kreisselmaier-Steinhauser 方程来最大化最小特征频率,则不需追踪最小模态,但是对于高阶模态则应当进行模态追踪,因为模态顺序可能已经发生转换。举例来说,当模型正在被优化时,第一阶频率被最大化,可能第二个特征模态变成了最小特征频率的模态。
Abaqus/CAE Usage:
Optimization module: Task→general topology task, Design Response Create: Single-term, Variable: Eigenfrequency from modal analysis or Eigenfrequency calculated with Kreisselmaier-Steinhauser formula
惯性矩
在优化过程中可使用惯性矩作为设计响应,以最小化关于一选定轴的转动惯量。在通用拓扑优化中,可使用整个模型或者某一区域的惯性矩作为目标函数或者约束条件。
惯性矩可以选择在三个坐标轴上或者三个坐标平面内的惯性矩:
如果选择了局部坐标系,Abaqus/CAE拓扑优化模块将采用局部坐标系坐标轴方向重新计算重心。没有指定局部坐标系时,将缺省采用全局坐标系。
当Abaqus/CAE拓扑优化模块计算惯性矩时,将把板壳和膜区域的厚度赋上并做为三维
区域考虑。并且Abaqus/CAE拓扑优化模块只计算那些支持拓扑优化的单元的惯性矩。所以,Abaqus/CAE拓扑优化模块计算出的惯性矩可能与Standard和Explicit的值不同。例如,当模型中包括线域时。
如果对于两个正交的轴,选择其中任何一个作为对称轴的话,对这两个轴的惯性积为0.
Abaqus/CAE
Usage Optimization module: Task→general topology task, Design Response→Create: Single-term, Variable: Moment of inertia
内力和弯矩
在通用拓扑优化中,可使用整个模型或某一区域的节点内力和内弯矩,作为优化目标和约束条件。
Table 2列出了可用的节点内力和内弯矩变量。
在此不能使用只有节点力和弯矩绝对值的参考坐标系。在优化中,结构必须在所定义的力的方向上有刚度,否则,在此方向的内力将变为0.
Abaqus/CAE
Usage Optimization module: Task→general topology task, Design Response→Create: Single-term, Variable: Internal force or Internal moment
支反力和力矩
节点反力和力矩只能用于一般算法的拓扑优化设计。下表列出了可供优化的设计响应。
节点反力和力矩不能使用局部坐标系。结构在所定义的力的方向上必须有刚度,否则反力为零。
Abaqus/CAE Usage:Optimization module: Task→general topology task, Design Response
→Create: Single-term, Variable:Reaction force or Reaction
moment
应变能
结构的柔度是结构柔性及刚性的度量,定义为所有单元的应变能之和,在线性模型中表达为t u ku ∑ ,其中u 为位移向量,k 为整体刚度矩阵。柔度与刚度互为倒数,因此最小化柔度等价于最大化整体刚度。如果载荷是热应力场,优化就会在使得结构变软的同时,应变能不断减小,因为降低应变能会导致硬化。另外,如果模型中定义了位移约束,则总是应该选择最大化应变能作为目标函数。
拓扑优化考虑整个模型的应变能,因此,如果选择应变能作为目标函数,则应该将目标函数适用于整个模型。
Abaqus/CAE Usage: Optimization module: Task →general topology task , Design Response →Create : Single-term , Variable: Strain energy
体积
体积是设计区域内所有单元体积之和e V ∑,其中e V 为单元的体积。在拓扑优化过程中,所有单元都根据当前Abaqus 模型的相对密度进行了放缩。对于大多数优化问题,需要给定一个体积约束。例如,如果试图最小化应变能(最大化刚度),并且没有施加体积约束,则Abaqus 会简单地在整个设计区域填充材料。
Abaqus/CAE Usage: Optimization module: Task →general topology task , Design
Response →Create : Single-term , Variable: Volume
重量
重量是设计区域内所有单元重量之和e W ∑,其中e W 为单元的重量。ATOM 计算中会不断采用当前密度。对于多数优化问题,如果不采用体积约束则须采用重量约束。采用重量约束而不是体积约束可以使得优化结果达到指定的物理重量。ATOM 仅对支持的单元类型进行重量优化。
Abaqus/CAE Usage: Optimization module: Task →general topology task , Design Response
→Create : Single-term , Variable: Weight
13.2.1.5形貌优化的设计响应
ATOM 形貌优化提供了特征频率、应力、接触应力、应变、节点应变能密度及体积等变量作为设计响应。形貌优化仅仅支持体积作为约束,其他响应仅能作为目标函数。
Kreisselmaier-Stenhauser 方程的特征频率
如果想在ATOM 形貌优化中最大化第一阶特征频率或者最大化某几阶特征频率,必须使用Kreisselmaier-Stenhauser 方程。在使用K-S 特征值方程时,不需要使用模态追踪。 Abaqus/CAE Usage: Optimization module: Task →shape task , Design Response →Create :
Single-term , Variable: Eigenfrequency calculated with
Kreisselmaier-Steinhauser formula
应力和接触应力
等效应力是形貌优化中应用最广泛的目标函数。ATOM 会将所有应力(节点力或者高斯积分点应力)插值到节点上进行优化。比如,可以对应力集中区域采用最小化最大von Mises 应力的方法进行优化,也可以对接触区域进行最小化接触压力的优化。ATOM 仅仅对区域内等效应力中的最大值进行优化。对于没有合适应力值的区域进行优化,ATOM 会发出Warning 。比如,当你选择没有发生接触的区域接触应力作为目标响应的时候,ATOM 会警告没有接触。如果Abaqus 模型包含了多个工况,设计响应则会对每个工况的应力值进行求和。
可以应用以下等效应力:
● von Mises
● 最大主应力或者最大主应力的绝对值
● 最小主应力或者最小主应力的绝对值
● 第二主应力
● Beltrami 应力
● Drucker Prager 应力(P 相关屈服应力)
● Galilei 应力
● Kuhn 应力
● Mariotte 应力
● Sandel 应力
● Tresca 应力
等效接触应力支持如下:
● 法向接触压力
● 接触剪切力
● 局部1方向接触剪切力
● 局部2方向接触剪切力
● 总的接触应力
应力和接触应力只能作为目标函数。
Abaqus/CAE Usage: Optimization module: Task →shape task , Design Response →Create :
Single-term , Variable: Stress or Contact stress
应变
如果你的模型有大变形,则应力不会是个模型响应的很好的指标。例如,结构有了塑性变形,在理想塑性变形阶段,等效应力将不再发生改变。在这种情况下,应变响应成为更为可靠的指标。可以选用如下等效应变:
● 弹性应变
● 塑性应变
● 全应变(前两者的和)
应变也仅能作为目标函数。
Abaqus/CAE Usage: Optimization module: Task →shape task , Design Response →Create :
Single-term , Variable: Strain
节点应变能密度
节点应变能密度ij ij u σε= ,是非线性材料中失效的更好的度量参量。
Abaqus/CAE Usage: Optimization module: Task →shape task , Design Response →Create :
Single-term , Variable: Strain energy density
体积
体积是唯一的形貌优化约束。体积被定义为既定区域内所有单元的体积之和:e V ∑ 。大多数优化问题中,体积是一种约束。
Abaqus/CAE Usage: Optimization module: Task →shape task , Design Response →Create:
Single-term, Variable: Volume
13.2.1.6设计响应的操作
可以将多个设计响应合并为一个设计响应,比如,一系列设计响应的最大值。也可以将一个设计响应的某种运算结果定义为另一个设计响应,例如不同节点的设计响应的差。
举例说明,可以定义两个设计响应来表达两个顶点在1方向的位移。也可以定义一个设计响应为这两个顶点在1方向的位移之差。然后可以定义一个约束,要求这个设计响应为0,这就间接约束了两个顶点在1方向必须具有相同的位移。
Abaqus/CAE Usage: Optimization module: Design Response →Create: Combined-term
13.2.2目标及约束
13.2.2.1概述
对于一个优化问题:
1) 一个目标函数定义了优化的目标
2) 一个约束提出了优化的限制条件并定义了优化的可行性
3) 几何限制给出了优化所遵从的结构形状特点
4) 停止条件定义了一次优化任务应该完成的标志。
13.2.2.2目标函数
目标函数给出了优化的目标。一个目标函数是由一系列设计响应得到的一个标量。比如,如果设计响应被定义成既定区域内节点的应变能,目标函数就可以是最小化设计响应之和:最小化应变能之和,也就是最大化这个区域的刚度。
一个优化问题可以被描述为:
()()()min ,x U x Φ
其中,Φ 是依赖于状态变量U 的目标函数, x 为设计变量。
最小化N 个设计响应的目标函数公式可以表示为:
()min 1min n ref i i i i W ??=??Φ=- ???
∑ 其中每个设计响应i ?被给定了权重i W , 和参考值ref i ?.
同理,最大化目标函数公式为:
()max 1max n ref i i i i W ??=??Φ=- ???
∑ 默认的权重系数是1.0,默认的拓扑优化参考值是0.0,形貌优化的默认参考值由ATOM 进行计算。对大多数优化问题,不需要改变默认的权重因子和参考值。然而在某些情况下,则必须改变权重因子以平衡目标函数对优化结果的决定性作用。改变权重因子对最终设计有巨大影响。另外,优化开始的时候某些支配性的设计响应在经过ATOM 对模型的调整之后可能会变得不那么重要。
最小化某些最大设计响应是一种重要的目标函数的优化公式。在每个设计循环中,ATOM 寻找权重化的设计响应中具有最大影响力的设计响应,然后试图最小化这些响应。在大多数问题中,最小化最大设计响应提供了令人满意的结果,因为它使得一系列设计响应的最大值变小了。比如,如果设计响应是模型中多个区域的应力,最小化这个最大设计响应就试图去最小化区域内的最大应力。公式可以表示为:
()min max 1
min max n ref i i i i i W ??=????Φ=- ? ?????∑ 定义目标函数的目标
一个目标函数的目标可以是最大化,也可以是最小化,或者最小化最大值(此时,设计响应是最大值,而目标函数是最小化这个最大值)。在所有情况下,权重因子和参考值规定了多个设计响应的贡献。
Abaqus/CAE Usage: Optimization module: Objective Function →Create: Target
13.2.2.3 约束
如前所述,一个优化问题可以描述为:
()()()min ,x U x Φ
其中,Φ是依赖于状态变量U 的目标函数, x 为设计变量。约束ψ可以应用到优化问题,约束i K 可以用到设计变量中:
()()()(),00i i x U x K x
?ψ≤??≤?? 其中()()()*,i i x U x ψ≤ψ, i ψ是被值*i ψ约束的设计响应。
另外, ()*i i K K x ≤, 其中i K 是设计变量如何规划的表述,比如可加工性, *i K 是设计变量的约束。
ATOM 可以得到优化目标函数的一个解。然而,如果约束不当,优化解可能并非合适的解。一个约束同一个设计响应类似,是一个标量。大多数优化利用约束条件来阻止优化过程走向一个并非所需要的解。例如,当试图最大化结构刚度时,如果不指定约束,ATOM 将简单地将整个区域填满材料。然而,如果约束了重量为原先的50%,ATOM 则强制去寻找一个能够同时满足刚度优化目标并且满足重量约束的优化解。拓扑优化和形貌优化的共同约束只有体积约束,不能将体积作为目标函数。不能对模型或者区域应用多个同样类型的约束,例如不能同时对整个模型和局部区域进行体积约束。
Abaqus/CAE Usage: Optimization module: Constraint →Create
应用约束到区域上
可以应用不同的约束到不同的模型区域上,这些区域可以有不同的材料参数或者材料类型。当ATOM计算设计响应时,它考虑了区域内不同材料特性。不能对整个模型或者一个区域施加多个体积约束。
13.2.2.4 几何约束
几何约束(Geometric restrictions)是直接应用到设计变量上的约束。几何约束允许设计限制和加工限制。
定义一个冻结区域
可以指定优化区域内的某区域为冻结区域,从而不参与优化过程。比如,应该将与轴承孔配合的轴或者与刚性表面连接的凸台定义为冻结区域。对于指定边界条件的区域必须进行冻结。为了简化这个操作,你可以请求ATOM自动冻结施加边界条件的区域。
Abaqus/CAE Usage: Optimization module: Geometric Restriction→Create: Frozen area
指定最小和最大部件尺寸
在多数情况下,必须通过指定最小部件尺寸来避免产生过薄的杆结构。然而,ATOM不能保证优化结果中一定没有小于指定的最小部件尺寸。最小部件尺寸必须大于平均单元边长。最大部件尺寸必须大于两倍的单元边长。否则,优化算法就会产生单元连续性问题。同一个问题的粗网格模型和细网格模型在指定相同的最小部件尺寸的时候,得到的结果应该是等效的。ATOM在施加边界条件的区域里不会产生小尺寸结构。从这些区域移走材料会导致结构破坏。
如果零件将要被铸造,则必须定义最大部件尺寸以避免特定区域过厚。ATOM将产生一些相对较薄的区域来防止生成厚区域。最大部件尺寸和最小部件尺寸不必同时定义。ATOM 假定给定了一个就产生另一个。最大部件尺寸与其他约束的组合,比如指定分模方向、模压或者冲压,只能用于一般算法的拓扑优化。(分模方向是指铸造时上下箱分离的方向或者冲头移动的方向。)
当指定了最大或者最小部件尺寸后,计算时间会显著增加。因此,最好仅对可能产生稀疏结构的区域施加部件尺寸约束。一般应该先进行一次没有尺寸约束的优化来判断是否需要使用尺寸约束。
Abaqus/CAE Usage: Optimization module: Geometric Restriction→Create: Member size
应用加工限制
拓扑优化过程一直会产生符合目标函数和约束的结构,然而所得到的设计结果可能不能用于标准加工工艺,比如铸造和锻压。可以应用几何限制使得拓扑优化过程只产生适合加工工艺的优化设计。比如,在进行拓扑优化时,可以令ATOM生成可以从铸模中取出,进而满足铸造要求的形状,或者可以用冲头和冲模加工的可冲压结构。
保持模压结构(Maintaining a moldable structure)
在弯曲载荷或者扭转载荷工况下,拓扑优化容易产生带洞的结构,而这种结构却很难铸造。所以,可以通过如下方式来阻止拓扑优化产生孔洞:
?锻压结构可以从锻模上移走,如Figure 4所示:
Figure 4 可锻造结构
?结构可以从上下模中移走,如Figure 5所示:
Figure 5 可铸造结构
相反的,Figure 6说明了孔洞结构或者切口结构使得结构不能被铸造。.
Figure 6 孔洞和切边使得结构变得不能铸造
Abaqus/CAE Usage: Optimization module: Geometric Restriction →Create: Demold
control;Demold technique, Demolding with a central plane
Optimization module: Geometric Restriction →Create: Demold control;Demold technique, Demolding at the region surface
Optimization module: Geometric Restriction →Create: Demold
control; Demold technique, Forging
维持冲压结构
可以指定结构为冲压过程制造。如果优化过程移走了结构的一个单元,它也同时移走了分模方向前后所有单元(与冲头移动方向相关)。
Figure 7 可冲压结构
ATOM 修改材料的比率在有冲压限制的基于条件的拓扑优化中不能设置的太高,否则会产生独立的结构。
Abaqus/CAE Usage: Use the following option to create a stamping geometric restriction:
Optimization module: Geometric Restriction →Create: Stamp control
Use the following option to specify the rate at which the ATOM
modifies the element properties:
Optimization module: Task →Create: Advanced , Size of increment
for volume modification
指定对称结构(Specifying a symmetric structure )
在模型中引入对称结构可以显著提高ATOM 的优化速度。ATOM 中可以采用如下对称约束:
● 关于轴线或者平面的对称(投影对称)
● 关于点的对称
● 旋转对称
● 周期性对称(在指定距离内重复某一结构)
拓扑优化中可以应用对称约束到非结构化网格或者四面体网格上。网格必须具有差不多的尺寸,因为结果的对称性要通过对粗糙网格的重构来实现。另外,ATOM 可能会因为网格尺寸差距过大从而导致优化失败。
如果定义了形貌优化的对称性,则ATOM
会将那些近似对称的节点放到一个对称组中
(一般来说,每个对称组均有两个对称的节点)。ATOM会自动决定对称组中的主控点,从而计算出从点位移,通过这种方式达到对称性。
如果指定了拓扑优化,优化开始的时候,结构网格不必对称。相反的,形貌优化则必须要求网格对称,以便于优化开始时识别对称节点。
Abaqus/CAE Usage: Optimization module: Geometric Restriction→Create: Planar
symmetry, Point symmetry, Rotational symmetry, or Cyclic
symmetry
应用形貌优化的附加约束
形貌优化通过移动表面结点使得表面应力均匀化的同时,满足了目标函数和任何约束。ATOM不能耦合相邻节点的位移,每个节点可以独立于其他节点进行移动。例如,优化过程可以将平面区域发展成非平面自由结构表面。通过耦合设计节点,可以强制优化保持平面形状。
耦合条件限制了解的范围,产生了潜在的优化趋势。另外,耦合约束会导致优化非常耗时。为了简化优化,在优化开始时,应该采用尽可能少的限制和少量的耦合条件,最好仅在需要的时候才采用这些约束。
形貌优化过程中可以采用附加约束:
●优化形状可以被车刀在指定的方向进行加工而生成。
●优化形状可以在指定方向上钻孔而生成。钻头生成的孔应该关于轴线对称,同时要
求钻头能够退出。
●优化形状可以在选定面上进行滑移而不穿透。
●限制节点位移:
?沿着指定矢量方向
?在收缩或者膨胀方向的位移
?沿着指定方向
?仅仅沿着指定自由度方向
?仅仅沿着载荷方向。
Abaqus/CAE Usage: Optimization module: Geometric Restriction→Create: Turn control,
Drill control, Penetration check, Slide region control, or Vector
13.2.2.5 组合几何约束
每个几何约束都在降低优化结果可以达到的可能性。另外,如果你应用了过多几何限制,Abaqus可能不会提供出好的优化结果。因此,优化开始的时候,最好对模型进行少量限制或者不限制。在对没有限制或者少量限制结果的认识基础上,再施加相应的必须的约束。
可以施加组合几何约束,但是有限几种组合方式是允许的。Abaqus按如下方式执行几何约束:
●最小部件尺寸
●对称约束
●加工约束
●最大部件尺寸
应用一个约束会弱化另一个约束的作用,比如不能定义旋转对称约束到一个与模具分模方向不平行的方向上。
如下制造约束的组合是被允许的:
●可以组合关于平面对称的约束和模具中跟这个平面垂直或者平行的分模方向。
●可以组合旋对称转约束和与转动轴线平行的分模方向。
●可以组合关于一个平面的两个对称约束,但是这两个平面必须相互正交。.
●当第一次利用基于条件的拓扑优化时,最好不要使用最大部件尺寸和分模方向的组
合约束,因为这样可能导致不收敛,除非你能确定这是收敛的。
●可以指定最小部件尺寸大于最大部件尺寸。Abaqus将会首先运行最小部件尺寸约
束,生成相对较厚的支承。随后这些较厚的支座会被分割为相互平行的小部件以满
足最小尺寸约束。
13.2.2.5 停止条件
停止条件会在每个设计循环中检查最大设计循环是否达到或者是否收敛到了优化的结果。ATOM会提供整体和局部停止条件,然而局部条件很少需要。
全局停止条件
全局收敛停止条件定义了设计循环应该达到的最大值。为了限制设计循环的数量,必须为每个优化任务定义一个全局停止条件。ATOM默认值如下表所示:
Abaqus/CAE Usage: Job module: Optimization→Create: Maximum cycles
局部停止条件(Local stop conditions)
局部停止条件指出了一个拓扑优化是否已经收敛到了最优解。局部停止条件应用到模型或者区域中的位移或者应力的优化过程中,来判断优化是否达成。一个局部停止条件对位移或者等效应力等标量值和一个参考值进行对比。标量值可以是一个区域中的最大值或者最小值,或者一个区域内所有值的求和。参考值可以从前一个迭代步中获取,也可以从第一个迭代步中获取。另外,可以将参考值定义为一个绝对值或者一个比例。例如,可以定义局部停止条件为某区域内所有节点的位移之和小于第一个迭代步中该区域内所有节点位移之和的1%。可以定义一到两个局部停止条件,可以指定两者之一或者两者同时(默认为同时)满足即可认为达到了局部停止条件。
局部停止条件的例子包含如下:
●如果指定了位移或者应力最小化,局部停止条件可以在优化后位移或者应力增长的
时候停止优化过程。
●当优化过程接近于优化解的时候,可以指定局部停止条件为应力或者位移在前后两
个迭代步之间的变化在指定的精度内。
●当优化过程接近于最优解时,可以指定局部停止条件为应力或者位移之和降低到一
定限度之下。可以在优化过程中指定某区域内节点位移之和为停止条件,可以带约
束,也可以不带约束。局部停止条件适用于很多目标函数,比如应力或者频率。
Abaqus/CAE Usage: Optimization module: Stop Condition→Create
13.2.3创建Abaqus优化模型
13.2.3.1概述
在每个设计循环中,优化设计需要进行:
●在拓扑优化中生成新的材料和单元特性;
●在形貌优化中调整节点坐标;
●将修正的模型提交给Abaqus进行分析;
●读取分析结果。
13.2.3.2准备Abaqus模型
应该小心地确认结构优化模块支持所生成的Abaqus模型。所有的结构优化设计的限制(包括单元类型等)都只适用于设计区域,设计区域之外的模型不参与结构优化设计。
●在进行优化设计之前,确认Abaqus模型能够进行分析并且产生期望的力学结果。
●仅在模型确实有非线性时再引入非线性因素;如果Abaqus模型是线性的,优化过
程的计算量会明显下降。同时也需要确保线性模型的优化设计确实能够获得合理合
理的结果,此时完全才可以不考虑几何、材料非线性。
●一个完整的优化设计需要多次设计循环来完成,所耗费的时间可能是很长的。因此,
尽可能简化Abaqus模型以缩短计算时间,比如,去掉那些对于优化设计来说不重
要的细节性因素。
●在ATOM中,inp文件不支持part和assembly的概念。在进行优化时,ATOM生
成不包含part和assembly的inp文件。
●ATOM从odb文件中读取数据。ATOM仅需要每个分析步的最后一个增量步的数
据。为了缩小输出文件的规模,可以仅指定输出每个分析步的最后一个增量步的结
果。
支持的分析类型
以下分析类型在拓扑优化和形貌优化中都是支持的:
●静态应力/位移分析,一般分析
●静态应力/位移分析,线性摄动步
●固有频率提取以及模态振型分析
支持的几何非线性
仅能在静态应力/位移分析中包含几何非线性。
拥有刚度限制的单元,例如具有超弹性材料特性的单元,在非线性优化设计分析中可能会产生过大的变形。这种变形会对收敛产生不利的影响并导致分析提前中断。因此应当特别留意在包含了超弹性材料特性的拓扑优化分析的大变形可能性。
支持的多载荷步
如果模型经历了一系列载荷,可以通过在一个分析步中施加多个载荷步来显著降低计算规模。
Abaqus中Topology和Shape优化指南
目录 1. 优化模块界面......................................................................................................- 1 - 2. 专业术语..............................................................................................................- 1 - 3.定义拓扑优化Task(general optimization和condition-based optimization).......- 2 - 3.1 General Optimization 参数设置.................................................................- 3 - 3.1.1 Basic选项参数..................................................................................- 3 - 3.1.2 Density选项参数..............................................................................- 4 - 3.1.3 Perturbation选项参数.......................................................................- 5 - 3.1.4 Advanced选项参数...........................................................................- 5 - 3.2 Condition-based topology Optimization 参数设置....................................- 6 - 3.2.1 Basic选项参数..................................................................................- 7 - 3.2.2 Advanced选项参数...........................................................................- 7 - 4 定义Shape Optimization Task方法....................................................................- 8 - 4.1 Basic选项参数............................................................................................- 8 - 4.2 Mesh Smoothing Quality选项参数............................................................- 9 - 4.3 Mesh Smoothing Quality选项参数..........................................................- 11 - 5 定义design response变量方法.........................................................................- 13 - 5.1 单个design response定义方法...............................................................- 14 - 5.2 combined design response定义方法........................................................- 15 - 5.3 design response使用注意事项.................................................................- 17 - 5.3.1 定义design response的操作.........................................................- 17 - 5.3.2 condition-based topology optimization的design response............- 18 - 5.3.3 general topology optimization的design response..........................- 18 - 5.3.4 design response for shape optimization...........................................- 21 - 6 定义objective function方法..............................................................................- 22 - 6.1 目标函数定义...........................................................................................- 23 - 6.2 目标函数的运算.......................................................................................- 23 - 6.2.1 min运算..........................................................................................- 23 - 6.2.2 max运算..........................................................................................- 24 -
ABAQUS拓扑优化分析手册/用户手册 分析手册: 13. Optimization Techniques优化技术 13.1 结构优化:概述 13.1.1 概述 ABAQUS结构优化是一个帮助用户精细化设计的迭代模块。结构优化设计能够使得结构组件轻量化,并满足刚度和耐久性要求。ABAQUS提供了两种优化方法——拓扑优化和形状优化。拓扑优化(Topology optimization)通过分析过程中不断修改最初模型中指定优化区域的单元材料性质,有效地从分析的模型中移走/增加单元而获得最优的设计目标。形状优化(Shape optimization)则是在分析中对指定的优化区域不断移动表面节点从而达到减小局部应力集中的优化目标。拓扑优化和形状优化均遵从一系列优化目标和约束。 最优化方法(Optimization)是一个通过自动化程序增加设计者在经验和直觉从而缩短研发过程的工具。想要优化模型,必须知道如何去优化,仅仅说要减小应力或者增大特征值是不够,做优化必须有更专门的描述。比方说,想要降低在两种不同载荷工况下的最大节点力,类似的还有,想要最大化前五阶特征值之和。这种最优化的目标称之为目标函数(Object Function)。另外,在优化过程中可以同时强制限定某些状态参量。例如,可以指定某节点的位移不超过一定的数值。这些强制性的指定措施叫做约束(Constraint)。 ABAQUS/CAE可以创建模型然后定义、配置和执行结构优化。更多信息请参考用户手册第十八章。 13.1.2 术语(Terminology) 设计区域(Design area): 设计区域即模型需要优化的区域。这个区域可以是整个模型,也可以是模型的一部分或者数部分。一定的边界条件、载荷及人为约束下,拓扑优化通过增加/删除区域中单元的材料达到最优化设计,而形状优化通过移动区域内节点来达到优化的目的。 设计变量(Design variables):设计变量即优化设计中需要改变的参数。拓扑优化中,设计区域中单元密度是设计变量,ABAQUS/CAE优化分析模块在其优化迭代过程中改变单元密度并将其耦合到刚度矩阵之中。实际上,拓扑优化将模型中单元移除的方法是将单元的质量和刚度充分变小从而使其不再参与整体结构响应。对于形状优化而言,设计变量是指设计区域内表面节点位移。优化时,ABAQUS或者将节点位置向外移动或者向内移动,抑或不移动。在此过程中,约束会影响表面节点移动的多少及其方向。优化仅仅直接修改边缘处的节点,而边缘内侧的节点位移通过边缘处节点插值得到。 设计循环(Design cycle): 优化分析是一种不断更新设计变量的迭代过程,执行ABAQUS进行模型修改、查看结果以及确定是否达到优化目的。其中每次迭代叫做一个设计循环。 优化任务(Optimization task):一次优化任务包含优化的定义,比如设计响应、目标、限制条件和几何约束。 设计响应(Design responses): 优化分析的输入量称之为设计响应。设计响应可以直接从ABAQUS的结果输出文件.odb中读取,比如刚度、应力、特征频率及位移等。或者ABAQUS 从结果文件中计算得到模型的设计响应,例如质心、重量、相对位移等。一个设计响应与模型紧密相关,然而,设计响应存在一定的范围,例如区域内的最大应力或者模型体积。另外,设计响应也与特点的分析步和载荷状况有关。 目标函数(Objective functions): 目标函数决定了优化的目标。一个目标函数是从设计响应中萃取的一定范围内的值,如最大位移和最大应力。一个目标函数可以用多个设计响应
拓扑优化是指形状优化,有时也称为外型优化。 拓扑优化的目标是寻找承受单载荷或多载荷的物体的最佳材料分配方案。这种方案在拓扑优化中表现为“最大刚度”设计。与传统的优化设计不同的是,拓扑优化不需要给出参数和优化变量的定义。目标函数、状态变量和设计变量(参见“优化设计”一章)都是预定义好的。用户只需要给出结构的参数(材料特性、模型、载荷等)和要省去的材料百分比。给每个有限元的单元赋予内部伪密度来实现。这些伪密度用PLNSOL ,TOPO 命令来绘出。拓扑优化的目标——目标函数——是在满足结构的约束(V )情况下减少结构的变形能。减小结构的变形能相当于提高结构的刚度。这个技术通过使用设计变量。 结构拓扑优化的基本思想是将寻求结构的最优拓扑问题转化为在给定的设计区域内寻求最优材料分布的问题。通过拓扑优化分析,设计人员可以全面了解产品的结构和功能特征,可以有针对性地对总体结构和具体结构进行设计。特别在产品设计初期,仅凭经验和想象进行零部件的设计是不够的。只有在适当的约束条件下,充分利用拓扑优化技术进行分析,并结合丰富的设计经验,才能设计出满足最佳技术条件和工艺条件的产品。连续体结构拓扑优化的最大优点是能在不知道结构拓扑形状的前提下,根据已知边界条件和载荷条件确定出较合理的结构形式,它不涉及具体结构尺寸设计,但可以提出最佳设计方案。拓扑优化技术可以为设计人员提供全新的设计和最优的材料分布方案。拓扑优化基于概念设计的思想,作为结果的设计空间需要被反馈给设计人员并做出适当的修改。最优的设计往往比概念设计的方案结构更轻,而性能更佳。经过设计人员修改过的设计方案可以再经过形状和尺寸优化得到更好的方案。 5.1.2优化拓扑的数学模型 优化拓扑的数学解释可以转换为寻求最优解的过程,对于他的描述是:给定系统描述和目标函数,选取一组设计变量及其范围,求设计变量的值,使得目标函数最小(或者最大)。一种典型的数学表达式为: ()()()12,,0,,0min ,g x x v g x x v f x v ?=??≤???? 式中,x -系统的状态变量;12g g 、-一等式和不等式的结束方程;(),f x v -目标函数;v -设计变量。 注:在上述方程中,x 作为系统的状态变量,并不是独立的变量,它是由设计变量得出的,并且与设计变量相关。 优化拓扑所要进行的数学运算目标就是,求取合适的设计变量v ,并使得目标函数值最小。 5.2基于ANSYS 的优化拓扑的一般过程 (进行内容排版修改) 在ANSYS 中,进行优化拓扑,一般分为6个步骤。具体流程见图5-1:
a b a q u s常用技巧总结-标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
Abaqus常用技巧总结 本手册是由simwe等论坛上精华帖以及本人下载的其他资料整理,由于很多资料搜集已经很久,而且时间有限,都没有注明原作者,也没有最资料进行分类整理,见谅。如需要,请PM给我。 Shelly31 Python.tzy@https://www.doczj.com/doc/cf5861539.html, 2007.8.1 建议阅读方式:
目录 ABAQUS常用技巧总结 (2) 目录 (3) 1.对TIME INCREMENT的根本理解 (5) 2.ABAQUS 请问 MOMENT的加载 (5) 3.ABAQUS计算时C盘的临时文件太大了,怎么改目录? (6) 4.CAE中如何加预应力 (6) 5.HYPERMESH里面看到ABAQUS分析的结果 (6) 6.X-Y PLOTS (6) 7.把上一次的分析结果作为下一次分析的初始条件该怎么做 (7) 8.材料方向与增量步 (8) 9.多个INP文件如何实现批处理 (9) 10.关于ABAQUS的任务管理 (10) 11.关于数据的输入输出 (12) 12.后处理积分 (12) 13.接触分析激活杀死 (13) 14.利用QUEUE的功能由本地机器向远程UNIX机器提交ABAQUS作业的方法[精华] (14) 15.利用命令进行计算时如何设置调用内存量 (17) 16.清华大学BBS的ABAQUS精华 (17) 17.请问怎么实现双曲线 (55)
18.取消坐标系等的显示 (56) 19.如何在计算中修改材料特性 (57) 20.输出计算过程中的总质量和总刚度矩阵 (60) 21.先张预应力: (61) 22.用户子程序的使用 (61) 23.怎样设定用双CPU机器进行ABAQUS计算 (61) 24.中途停止正在运算的JOB (62) 25.自适应网格技术 (62) 26.ABAQUS计算与内存 (63) 27.质量缩放 (64) 28.ABAQUS多处理器进行并行计算的效果研究 (79) 29.YAHOO讨论组摘录--CONTACT+OVERCLOSURE (81) 30.原创:无限元建立方法,希望得到加分 (95) 31.[分享]ABAQUS 使用问答 (102) 32.[转帖]ABAQUS6.4导入外来模型的几点小经验! (122) 33.ABAQUS的多图层绘图 (125) 34.子结构 (125) 35.如何在不同的分析步改变材料的参数 (126) 36.模型的重启动分析-RESTART (127) 37. ABAQUS的单位心得 (128)
拓扑优化技术 第1节基本知识 一、拓扑优化的概念 拓扑优化是指形状优化,有时也称为外型优化。拓扑优化的目标是寻找承受单载荷或多载荷的物体的最佳材料分配方案。这种方案在拓扑优化中表现为“最大刚度”设计。 与传统的优化设计不同的是,拓扑优化不需要给出参数和优化变量的定义。目标函数、状态变量和设计变量都是预定义好的。用户只需要给出结构的参数(材料特性、模型、载荷等)和要省去的材料百分比。 拓扑优化的目标—目标函数—是在满足结构的约束(V)情况下减少结构的变形能。减小结构的变形能相当于提高结构的刚度。这个技术通过使用设计变量( i)给每个有限元的单元赋予内部伪密度来实现。这些伪密度用PLNSOL,TOPO命令来绘出。 ANSYS提供的拓扑优化技术主要用于确定系统的最佳几何形状,其原理是系统材料发挥最大利用率,同时确保系统的整体刚度(静力分析)、自振频率(模态分析)在满足工程要求的条件下获得极大或极小值。 拓扑优化应用场合:线性静力分析和模态分析。 拓扑优化原理:满足结构体积缩减量的条件下使目标函数结构柔量能量(the enery of structure compliance—SCOMP)的极小化。结构柔量能量极小化就是要求结构刚度的最大化。 例如,给定V=60表示在给定载荷并满足最大刚度准则要求的情况下省去60%的材料。图19-1表示满足约束和载荷要求的拓扑优化结果。图19-1a表示载荷和边界条件,图19-b 表示以密度云图形式绘制的拓扑结果。 图19-1 体积减少60%的拓扑优化示例 二、拓扑优化的基本过程 拓扑优化的基本步骤如下:
1.定义结构问题定义材料弹性模量、泊松系数、材料密度。 2.选择单元类型拓扑优化功能中的模型只能采用下列单元类型: ● 二维实体单元:Plane2和Plane82,用于平面应力问题和轴对称问题。 ● 三维实体单元:Solid92、Solid95。 ● 壳单元:SHELL93。 3.指定优化和不优化区域ANSYS只对单元类型编号为1的单元网格部分进行拓扑优 化,而对单元类型编号大于1的单元网格部分不进行拓扑优化,因此,拓扑优化时要确保进行拓扑优化区域单元类型编号为1,而不进行拓扑优化区域单元类型编号大于1即可。 4.定义并控制载荷工况或频率提取可以在单个载荷工况和多个载荷工况下做拓扑优化,单载荷工况是最简便的。 要在几个独立的载荷工况中得到优化结果时,必须用到写载荷工况和求解功能。在定义完每个载荷工况后,要用LSWRITE命令将数据写入文件,然后用LSSOLVE命令求解载荷工况的集合。 5.定义和控制优化过程拓扑优化过程包括定义优化参数和进行拓扑优化两个部分。用户可以用两种方式运行拓扑优化:控制并执行每一次迭代或自动进行多次迭代。 ANSYS有三个命令定义和执行拓扑优化:TOPDEF,TOPEXE和TOPITER。TOPDEF 命令定义要省去材料的量,要处理载荷工况的数目,收敛的公差;TOPEXE命令执行一次优化迭代;TOPITER命令执行多次优化迭代。 (1)定义优化参数首先要定义优化参数。用户要定义要省去材料的百分比,要处理载荷工况的数目,收敛的公差。 命令:TOPDEF GUI:Main Menu>Solution>Solve>Topological opt 注:本步所定义的内容并不存入ANSYS数据库中,因此在下一个拓扑优化中要重新使用TOPDEF命令。 (2)执行单次迭代定义好优化参数以后,可以执行一次迭代。迭代后用户可以查看收敛情况并绘出或列出当前的拓扑优化结果。可以继续做迭代直到满足要求为止。如果是在GUI方式下执行,在Topological Optimization 对话框(ITER域)中选择一次迭代。 命令:TOPEXE GUI:Main Menu>Solution>Solve>Topological opt TOPEXE的主要优点是用户可以设计自己的迭代宏进行自动优化循环和绘图。在下一节,可以看到TOPITER命令是一个ANSYS的宏,用来执行多次优化迭代。 (3)自动执行多次迭代 在定义好优化参数以后,用户可以自动执行多次迭代。在迭代完成以后,可以查看收敛情况并绘出或列出当前拓扑形状。如果需要的话,可以继续执行求解和迭代。TOPITER 命令实际是一个ANSYS的宏,可以拷贝和定制。
ABAQUS教材:入门使用手册 一、前言 ABAQUS就是国际上最先进得大型通用有限元计算分析软件之一,具有惊人得广泛得模拟能力、它拥有大量不同种类得单元模型、材料模型、分析过程等、可以进行结构得静态与动态分析,如:应力、变形、振动、冲击、热传递与对流、质量扩散、声波、力电耦合分析等;它具有丰富得单元模型,如杆、梁、钢架、板壳、实体、无限体元等;可以模拟广泛得材料性能,如金属、橡胶、聚合物、复合材料、塑料、钢筋混凝土、弹性泡沫,岩石与土壤等。 对于多部件问题,可以通过对每个部件定义合适得材料模型,然后将它们组合成几何构形。对于大多数模拟,包括高度非线性问题,用户仅需要提供结构得几何形状、材料性能、边界条件、荷载工况等工程数据。在非线性分析中,ABAQUS能自动选择合适得荷载增量与收敛准则,它不仅能自动选择这些参数得值,而且在分析过程中也能不断调整这些参数值,以确保获得精确得解答、用户几乎不必去定义任何参数就能控制问题得数值求解过程。 1、1ABAQUS产品 ABAQUS由两个主要得分析模块组成,ABAQUS/Standard与AB AQUS/Explicit。前者就是一个通用分析模块,它能够求解广泛领域得线性与非线性问题,包括静力、动力、构件得热与电响应得问题。后者就是一个具有专门用途得分析模块,采用显式动力学有限元格式,它适用于模拟短暂、瞬时得动态事件,如冲击与爆炸问题,此外,它对处理改变接触条件得高度非线性问题也非常有效,例如模拟成型问题。 ABAQUS/CAE(plete ABAQUS Environment) 它就是ABAQUS得交互式图形环境、通过生成或输入将要分析结构得几何形状,并将其分解为便于网格划分得若干区域,应用它可以方便而快捷地构造模型,然后对生成得几何体赋予物理与材料特性、荷载以及边界条件、ABAQUS/CAE具有对几何体划分网格得强大功能,并可检验所形成得分析模型。模型生成后,ABAQUS/CAE可以提交、监视与控制分析作业。而Visualization(可视化)模块可以用来显示得到得结果、 1。2有限元法回顾 任何有限元模拟得第一步都就是用一个有限元(Finite Element)得集合来离散(Discretize)结构得实际几何形状,每一个单元代表这个实际结构
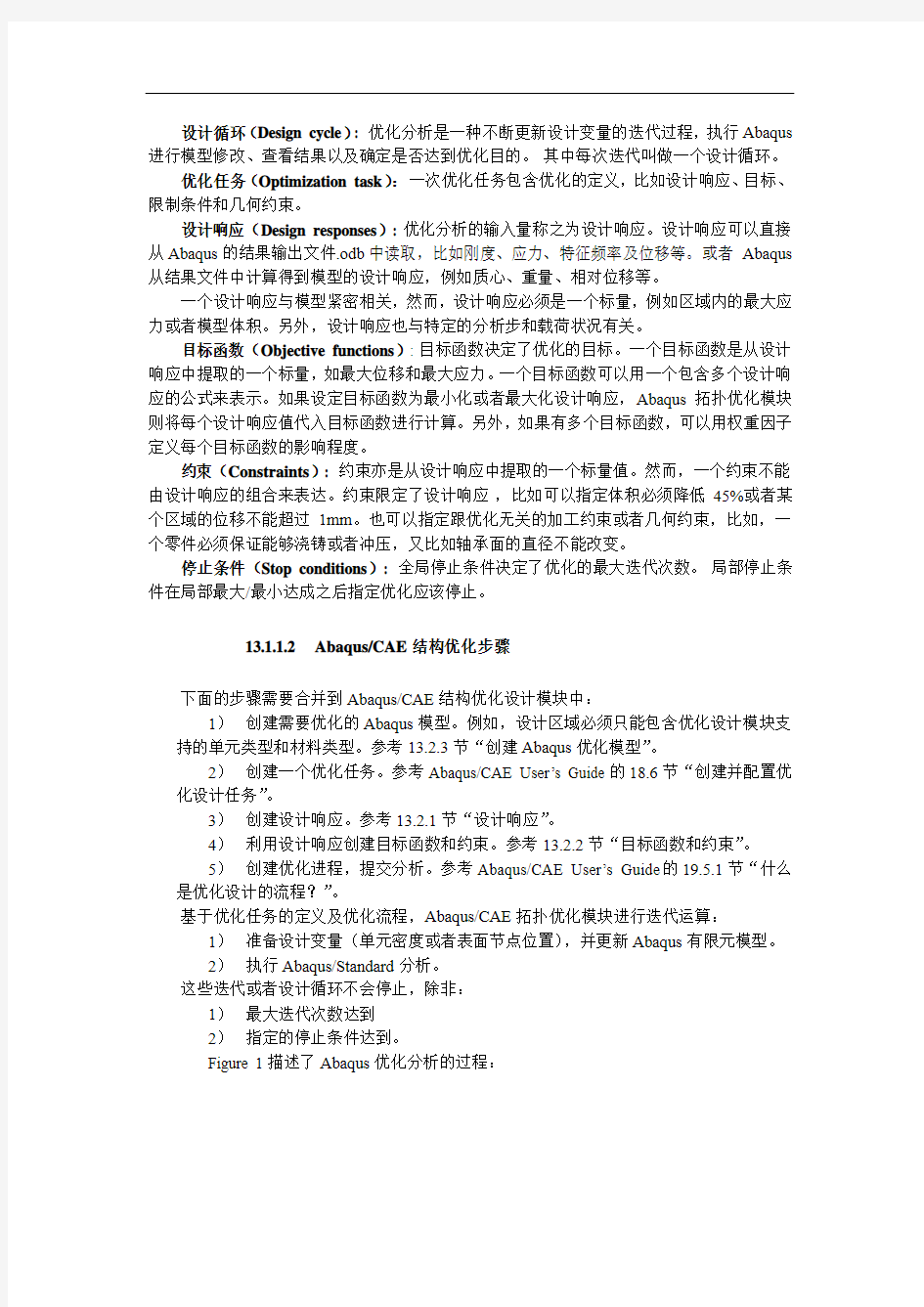
L5.1 w w w .3d s .c o m | ? D a s s a u l t S y s t èm e s Lesson content: Problem Statement Topology Optimization – Results Topology Optimization – Results Examination Topology Optimization – Analysis Conclusions Lesson 5: Nonlinear Geometric Effects in Topology Optimization 30 minutes L5.2 w w w .3d s .c o m | ? D a s s a u l t S y s t èm e s Problem Statement Consider a beam structure, clamped at both ends, subjected to a prescribed displacement in its center region. Topology optimization task: Minimize the strain energy while using only 10% of the original mass. Evaluated solver and material combinations: Linear geometry and linear material Linear geometry and nonlinear material Nonlinear geometry and linear material Nonlinear geometry and nonlinear material prescribed displacement Prescribe displacement c l a m p e d e n d s y m m e t r y Mechanical model Finite element model, exploiting symmetry
ABAQUS教材:入门使用手册 一、前言 ABAQUS是国际上最先进的大型通用有限元计算分析软件之一,具有惊人的广泛的模拟能力。它拥有大量不同种类的单元模型、材料模型、分析过程等。可以进行结构的静态与动态分析,如:应力、变形、振动、冲击、热传递与对流、质量扩散、声波、力电耦合分析等;它具有丰富的单元模型,如杆、梁、钢架、板壳、实体、无限体元等;可以模拟广泛的材料性能,如金属、橡胶、聚合物、复合材料、塑料、钢筋混凝土、弹性泡沫,岩石与土壤等。 对于多部件问题,可以通过对每个部件定义合适的材料模型,然后将它们组合成几何构形。对于大多数模拟,包括高度非线性问题,用户仅需要提供结构的几何形状、材料性能、边界条件、荷载工况等工程数据。在非线性分析中,ABAQUS能自动选择合适的荷载增量和收敛准则,它不仅能自动选择这些参数的值,而且在分析过程中也能不断调整这些参数值,以确保获得精确的解答。用户几乎不必去定义任何参数就能控制问题的数值求解过程。 1.1 ABAQUS产品 ABAQUS由两个主要的分析模块组成,ABAQUS/Standard和ABAQUS/Explicit。前者是一个通用分析模块,它能够求解广泛领域的线性和非线性问题,包括静力、动力、构件的热和电响应的问题。后者是一个具有专门用途的分析模块,采用显式动力学有限元格式,它适用于模拟短暂、瞬时的动态事件,如冲击和爆炸问题,此外,它对处理改变接触条件的高度非线性问题也非常有效,例如模拟成型问题。 ABAQUS/CAE(Complete ABAQUS Environment) 它是ABAQUS的交互式图形环境。通过生成或输入将要分析结构的几何形状,并将其分解为便于网格划分的若干区域,应用它可以方便而快捷地构造模型,然后对生成的几何体赋予物理和材料特性、荷载以及边界条件。ABAQUS/CAE具有对几何体划分网格的强大功能,并可检验所形成的分析模型。模型生成后,ABAQUS/CAE可以提交、监视和控制分析作业。而Visualization(可视化)模块可以用来显示得到的结果。 1.2 有限元法回顾 任何有限元模拟的第一步都是用一个有限元(Finite Element)的集合
结构拓扑优化的发展现状及未来 王超 中国北方车辆研究所一、历史及发展概况 结构拓扑优化是近20年来从结构优化研究中派生出来的新分支,它在计算结构力学中已经被认为是最富挑战性的一类研究工作。目前有关结构拓扑优化的工程应用研究还很不成熟,在国外处在发展的初期,尤其在国内尚属于起步阶段。1904 年Michell在桁架理论中首次提出了拓扑优化的概念。自1964 年Dorn等人提出基结构法,将数值方法引入拓扑优化领域,拓扑优化研究开始活跃。20 世纪80 年代初,程耿东和N. Olhoff在弹性板的最优厚度分布研究中首次将最优拓扑问题转化为尺寸优化问题,他们开创性的工作引起了众多学者的研究兴趣。1988年Bendsoe和Kikuchi发表的基于均匀化理论的结构拓扑优化设计,开创了连续体结构拓扑优化设计研究的新局面。1993年和提出了渐进结构优化法。1999年Bendsoe和Sigmund证实了变密度法物理意义的存在性。2002 年罗鹰等提出三角网格进化法,该方法在优化过程中实现了退化和进化的统一,提高了优化效率。 二、拓扑优化的工程背景及基本原理 通常把结构优化按设计变量的类型划分成三个层次:结构尺寸优化、形状优化和拓扑优化。尺寸优化和形状优化已得到充分的发展,但它们存在着不能变更结构拓扑的缺陷。在这样的背景下,人们开始研究拓扑优化。拓扑优化的基本思想是将寻求结构的最优拓扑问题转化为在给定的设计区域内寻求最优材料的分布问题。寻求一个最佳的拓扑结构形式有两种基本的原理:一种是退化原理,另一种是进化原理。退化原理的基本思想是在优化前将结构所有可能杆单元或所有材料都加上,然后构造适当的优化模型,通过一定的优化方法逐步删减那些不必要的结构元素,直至最终得到一个最优化的拓扑结构形式。进化原理的基本思想是把适者生存的生物进化论思想引入结构拓扑优化,它通过模拟适者生存、物竞天择、优胜劣汰等自然机理来获得最优的拓扑结构。 三、结构拓扑优化设计方法 目前常使用的拓扑优化设计方法可以分为两大类:退化法和进化法。 退化法即传统的拓扑优化方法,一般通过求目标函数导数的零点或一系列迭代计算过程求最优的拓扑结构。目前常用于拓扑优化的退化法有基结构方法、均匀化方法、变密度法、变厚度法等。 基结构方法(GSA)的思路是假定对于给定的桁架节点,在每两个节点之间用杆件连结起来得到的结构称为基结构。按照某种规则或约束,将一些不必要的杆件从基本结构中删除,认为最终剩下的构件决定了结构的最佳拓扑。基结构方法更适合于桁架和框架结构的拓扑优化。基结构法是在有限的子空间内寻优,容易丢失最优解,另外还存在组合爆炸、解的奇异性等问题。 均匀化方法(HA)引入微结构的单胞,通过优化计算确定其材料密度分布,并由此得出最优的拓扑结构。均匀化方法主要应用于连续体的拓扑优化设计,它不仅能用于应力约束和位移约束,也能用于频率约束。目前用均匀化方法来进行拓扑优化设计的有一般弹性问题、热传导问题、周期渐进可展曲面问题、非线性热弹性问题、振动问题和骨改造问题等。 变密度法是一种比较流行的力学建模方式,与采用尺寸变量相比,它更能反映拓
第12章优化设计和敏感性分析 本章主要讲解应用Abaqus进行结构优化设计和敏感性分析。 目前的产品结构设计,大多靠经验,规划几种设计方案,结合CAE分析择优选取,但规划的设计方案并不一定是最优方案,故本章前半部分讲解优化设计中的拓扑优化和形状优化,并制定操作SOP,辅以工程实例详解。 工程实际中,加工制造、装配误差等造成的设计参数变异,会对设计目标造成影响,因此寻找出参数的影响大小即敏感性,变得尤为重要,故本章后半部分着重讲解敏感性分析,并制定操作SOP,辅以工程实例求出设计参数敏感度,详解产品的深层次研究。 知识要点: ?结构优化设计基础 ?拓扑、形状优化理论 ?拓扑、形状优化SOP及实例 ?敏感性分析理论 ?敏感性分析SOP及实例 12.1 优化设计基础 优化设计以数学中的最优化理论为基础,以计算机为手段,根据设计所追求的性能目标,建立目标函数,在满足给定的各种约束条件下,优化设计使结构更轻、更强、更耐用。 在Abaqus 6.11之前,需要借用第三方软件(比如Isight、TOSCA)实现优化设计及敏感性分析,远不如Hyperworks及Ansys等模块化集成程度高。从Abaqus 6.11新增Optimization module后,借助于其强大的非线性分析能力,结构优化设计变得更具可行性和准确性。 12.1.1 结构优化概述 结构优化是一种对有限元模型进行多次修改的迭代求解过程,此迭代基于一系列约束条件向设定目标逼近,Abaqus优化程序就是基于约束条件,通过更新设计变量修改有限元模型,应用Abaqus进行结构分析,读取特定求解结果并判定优化方向。 Abaqus提供了两种基于不同优化方法的用于自动修改有限元模型的优化程序:拓扑优化(Topology optimization)和形状优化(Shape optimization)。两种方法均遵从一系列优化目
ANSYS拓扑优化原理讲解以及实例操作
拓扑优化是指形状优化,有时也称为外型优化。 拓扑优化的目标是寻找承受单载荷或多载荷的物体的最佳材料分配方案。这种方案在拓扑优化中表现为“最大刚度”设计。与传统的优化设计不同的是,拓扑优化不需要给出参数和优化变量的定义。目标函数、状态变量和设计变量(参见“优化设计”一章)都是预定义好的。用户只需要给出结构的参数(材料特性、模型、载荷等)和要省去的材料百分比。给每个有限元的单元赋予内部伪密度来实现。这些伪密度用PLNSOL ,TOPO 命令来绘出。拓扑优化的目标——目标函数——是在满足结构的约束(V )情况下减少结构的变形能。减小结构的变形能相当于提高结构的刚度。这个技术通过使用设计变量。 结构拓扑优化的基本思想是将寻求结构的最优拓扑问题转化为在给定的设计区域内寻求最优材料分布的问题。通过拓扑优化分析,设计人员可以全面了解产品的结构和功能特征,可以有针对性地对总体结构和具体结构进行设计。特别在产品设计初期,仅凭经验和想象进行零部件的设计是不够的。只有在适当的约束条件下,充分利用拓扑优化技术进行分析,并结合丰富的设计经验,才能设计出满足最佳技术条件和工艺条件的产品。连续体结构拓扑优化的最大优点是能在不知道结构拓扑形状的前提下,根据已知边界条件和载荷条件确定出较合理的结构形式,它不涉及具体结构尺寸设计,但可以提出最佳设计方案。拓扑优化技术可以为设计人员提供全新的设计和最优的材料分布方案。拓扑优化基于概念设计的思想,作为结果的设计空间需要被反馈给设计人员并做出适当的修改。最优的设计往往比概念设计的方案结构更轻,而性能更佳。经过设计人员修改过的设计方案可以再经过形状和尺寸优化得到更好的方案。 5.1.2优化拓扑的数学模型 优化拓扑的数学解释可以转换为寻求最优解的过程,对于他的描述是:给定系统描述和目标函数,选取一组设计变量及其范围,求设计变量的值,使得目标函数最小(或者最大)。一种典型的数学表达式为: ()()()12,,0,,0 min ,g x x v g x x v f x v ?=??≤???? 式中,x -系统的状态变量;12 g g 、-一等式和不等式的结束方程;(),f x v -目标函数;v -设计变量。 注:在上述方程中,x 作为系统的状态变量,并不是独立的变量,它是由设计变量得出的,并且与设计变量相关。 优化拓扑所要进行的数学运算目标就是,求取合适的设计变量v ,并使得目标函数值最小。
基于拓扑优化的车身结构研究 瞿元王洪斌张林波吴沈荣 奇瑞汽车股份有限公司,安徽芜湖,241009 摘要:随着CAE技术的发展,虚拟仿真技术在汽车开发中的作用也愈来愈显著。而前期工程阶段,如何布置出合理的车身骨架架构,一直是个相对空白的地带,也是整车正向开发过程中绕不过的坎。尽管研发工程师根据经验,参照现有车型的结构特点,也能进行车身骨架架构的设定,但总是缺乏有效手段直观地反映不同车型结构布置的特点。本文用拓扑优化的方法,从结构基本特征的角度来审视这一问题,并运用该方法对某SUV车身结构进行研究,获得一些直观性的结论。 关键词:车身,前期工程,拓扑优化 1、引言 随着对整车研发过程认识的加深,以及对正向开发过程的探索,在车型开发前期,对车身结构做出更合理的规划显得愈来愈重要。常规的研发思路之一是通过参考已有车型的结构,经过适当的修改,形成新的结构,并用于新车型中。但是对于原始车型的设计思路、结构布置的原因等缺乏系统的理解,或者理解不深,往往在更改过程中产生新的问题。为了部分解决上述问题,本文从结构拓扑优化的角度,对某SUV车型车身结构的总体布置进行初步探讨,以期加深对结构布置的理解。 2、研究方法概述 合理化的车身结构,是满足整车基本性能的重要保障。为了能够实现结构的最优布置,文献[1]使用了拓扑优化工具来布置车身结构。其基本思路是从造型以及车内空间布置出发,建立车身空间的基础网格模型,然后根据一定的工况要求,对基础网格进行拓扑分析,并根据拓扑结果建立梁、板壳模型,并进行多项性能的优化,从而实现车身结构的正向开发。本文借助于该思想,建立研究对象的结构空间包络,并对该包络进行拓扑分析,然后将仿真结果与原始结构进行比较,寻找车身结构中的关键点,推测初始结构可能的布置思想,从而加深对该研究思路的理解。其基本过程如下图所示: 3.2 工况 车身在实际使用过程中承受非常复杂的载荷,这些载荷对车身的影响各不相同,有的影响局部,有的影响整个车身。在实际研发过程中,不可能对所有可能的工况进行考察,而且,不同的设计阶段,考察的指标也不相同。在概念设计阶段,更重要的是保证车身的总体结构刚度,避免后期产生较大变更,导致项目延期或者增加较多的开发成本。本文主要考察某SUV车型结构布置特点,因此,主要考虑NVH以及碰撞两个方面的工况。其具体考察工况如下表1所示,4个NVH工况,主要考察整体刚度以及前后端的弯曲性能;4个碰撞方面的工况,主要考察车身承受不同方向的撞击。 表1 主要考察工况[1]
11多步骤分析 ABAQUS模拟分析的一般性目标是确定模型对所施加载荷的响应。回顾术语载荷(load)在ABAQUS中的一般性含义,载荷代表了使结构的响应从它的初始状态到发生变化的任何事情;例如:非零边界条件或施加的位移、集中力、压力以及场等等。在某些情况下载荷可能相对简单,如在结构上的一组集中载荷。在另外一些问题中施加在结构上的载荷可能会相当复杂,例如,在某一时间段内,不同的载荷按一定的顺序施加到模型的不同部分,或载荷的幅值是随时间变化的函数。采用术语载荷历史(load history)以代表这种作用在模型上的复杂载荷。 在ABAQUS中,用户将整个的载荷历史划分为若干个分析步(step)。每一个分析步是由用户指定的一个“时间”段,在该时间段内ABAQUS计算该模型对一组特殊的载荷和边界条件的响应。在每一个分析步中,用户必须指定响应的类型,称之为分析过程,并且从一个分析步到下一个分析步,分析过程也可能发生变化。例如,可以在一个分析步中施加静态恒定载荷,有可能是自重载荷;而在下一个分析步中计算这个施加了载荷的结构对于地震加速度的动态响应。隐式和显式分析均可以包含多个分析步骤;但是,在同一个分析作业中不能够组合隐式和显式分析。为了组合一系列的隐式和显式分析步,可以应用结果传递或输入功能。在ABAQUS分析用户手册(ABAQUS Analysis User’s Manual)第results between ABAQUS/Explicit and ABAQUS/Standard”中讨论了这个功能。而本指南不做进一步的讨论。 ABAQUS将它的所有分析过程主要划分为两类:线性扰动(linear perturbation)和一般性分析(general)。在ABAQUS/Standard或在ABAQUS/Explicit分析中可以包括一般分析步;而线性扰动分析步只能用于ABAQUS/Standard分析。对于两种情况的载荷条件和“时间”定义是不相同的,因而,从每一种过程得到的结果必须区别对待。 在一般分析过程中,即一般分析步(general step),模型的响应可能是非线性的或者是线性的。而在采用扰动过程的分析步中,即称为扰动分析步(perturbation step),响应只能是线性的。ABAQUS/Standard处理这个分析步作为由前面的任何一般分析步创建的预加载、预变形状态的线性扰动(即所谓的基本状态(base state));ABAQUS 的线性模拟功能比之单纯线性分析的程序是更加广义的。
初始损伤对应于材料开始退化,当应力或应变满足于定义的初始临界损伤准则,则此时退化开始。Abaqus 的Damage for traction separation laws 中包括:Quade Damage、Maxe Damage、Quads Damage、Maxs Damage、Maxpe Damage、Maxps Damage 六种初始损伤准则,其中前四种用于一般复合材料分层模拟,后两种主要是在扩展有限元法模拟不连续体(比如crack 问题)问题时使用。前四种对应于界面单元的含义如下:Maxe Damage 最大名义应变准则:Maxs Damage 最大名义应力准则:Quads Damage 二次名义应变准则:Quade Damage 二次名义应力准则 最大主应力和最大主应变没有特定的联系,不同材料适用不同准则就像强度理论有最大应力理论和最大应变理论一样~ ABAQUS帮助文档10.7.1 Modeling discontinuities as an enriched feature using the extended finite element method 看看里面有没有你想要的 Defining damage evolution based on energy dissipated during the damage process 根据损伤过程中消耗的能量定义损伤演变 You can specify the fracture energy per unit area, , to be dissipated during the damage process directly. 您可以指定每单位面积的断裂能量,在损坏过程中直接消散。Instantaneous failure will occur if is specified as 0. 瞬间失效将发生 However, this choice is not recommended and should be used with care because it causes a sudden drop in the stress at the material point that can lead to dynamic instabilities. 但是,不推荐这种选择,应谨慎使用,因为它会导致材料点的应力突然下降,从而导致动态不稳定。 The evolution in the damage can be specified in linear or exponential form. 损伤的演变可以以线性或指数形式指定。 Linear form 线性形式
ANSYS拓扑优化实例 如下图所示的长方体,受到一个1000N的集中载荷,四周为固定端,弹性模量为E=2e11,泊松比为0.3。 1.设定分析作业名 从实用菜单中选择Utility Menu:File>Change Jobname 命令,将打开Change Jobname对话框,如图所示,输入example of topology单击OK。 2.设定分析标题 从实用菜单中选择Utility Menu:File>Change Title 命令,将打开Change Title对话框,如图所示,输入single-load example of topo单击OK。 3.定义单元类型 (1)从主菜单中依次选择Main Menu:Preprocessor-Element Type-Add/Edit/Delete命令将打开Element Type(单元类型)对话框。 (2)单击Add,将打开Library of Element Type ,选择Solid95,依次单击Apply、OK。 如下图所示,单元类型对话框将会出现两个单元类型(拓扑优化只优化单元类型为1
(Type1)的部分)。 (3)单击Close,完成设置。 4.定义材料属性 (1)从主菜单中选择Main Menu:Preprocessor-Material Props-Material Models将打开Define Material Model Behavior(定义材料属性)窗口,左窗口Material Model Number 1。 (2)依次在右窗口双击Structural>Linear>Elastic>Isotropic,给出弹性模量EX=2e11和泊松比PRXY=0.3。 (3)单击OK回到Define Material Model Behavior(定义材料属性)窗口,关闭窗口完成设置。