
一种水声定位系统的声速修正方法 葛 亮1,吴怀河2 (1.中国海洋大学工程学院,山东青岛 266071;2.东阿县水利局,山东东阿 252000) 摘要:海水中声速沿深度方向分布较为复杂,致使准确定位难以实现。为提高定位精度,必须进行声速修正。提出了一种查表法,建立有效声速表进行声速迭代修正,此方法适用于各种定位系统。 关键词:水声定位;声速修正;有效声速 中图分类号:S625.5;S153.4 文献标识码:A 文章编号:1000-2324(2006)04-0647-04 收稿日期:2005-3-20 作者简介:葛亮(1981- )男,山东泰安,硕士,研究方向为水声定位。 CORRECTI ON OF SOUND VELOCITY I N ACOU STI C P O SI TION I NG SYSTE M Ge L iang 1,WU H ua i-he 2 (1.Engi n eeri ng I n stitute ,Ocean Un i v .of Ch i n a ,Q i ngdao 266071 2.W ater C onservan cy B ureau ofDonge ,252000,Ch i n a) Abst ract :I n sea w ater it is hard to achieve accurate location because o f the sound velocity vary i n g w ith depth .So the correction of sound ve loc ity must be considered carefully to get a better positi o n accuracy .ESV (E ffective Sound V elocity )and A tab le-look -up m ethod i s estab lished for correcti n g the sound ve loc ity by buildi n g up a ESV (E ffective Sound Ve loc ity)table .The m ethod can be applied to all k i n ds o f positi o ning sys te m s . K ey W ords :Acoustic positi o n i n g ;Correction o f sound velocity ;ESV 在利用时延进行距测量的水声定位系统中,一般是将水下目标点到各接收点的传播时延与声速相乘来计算目标与个接收点的距离差,从而求解目标坐标实现定位。由于水下沿深度方向存在声速梯度,导致声线发生弯曲。为提高定位精度,实现精确定位,必须进行声速修正。 1 海水中的声传播速度 海水是一种非均匀介质,声传播速度不为常数,由实验结果和理论分析,已得出了一些表示声速与温度、盐度和深度的方程。式(1)是其中一个典型的式子 [1] c =1449+4.6T -0.055T 2+0.0003T 3+(1.39-0.012T )(S -35)+0.017T (1) 式中,c 为海水声速(米/秒),T 为温度( ),S 为盐度,Z 为深度。海水的盐度和温度本身也是深度的函数,为研究方便,将声速视为深度的函数。在分层海洋介质中,由于声速梯度没有水平方向的变化,因此声线在传播时的掠射角只是深度的函数,故声线将随深度变化而发生弯曲。图1为深海的典型声速剖面 图[2]。在浅海,声速随深度的变化受到更多因素的影响,因而其规律性不如深海那样明显。应该说明,声速在水平方向也是变化的,只是这种变化十分缓慢,在数十千米范围内通常忽略不计。2 水声定位测距原理 图2所示为一常规定位问题。图中,O (x,y,z )为定位目标,N 个传感器所在位置为(x i ,y i ,z i ),i =1, N 。通过对目标与传感器之间脉冲信号的时间测量来实现对目标O 点的坐标位置解算,实现定位。 山东农业大学学报(自然科学版),2006,37(4):647-650Journa l o f Shandong A g ricu lt ura lU n i versity (N atura l Sc i ence)
近两年跟踪速度较快的算法小结 近两年跟踪速度较快的算法有CN [1],KCF [2],STC [3],ODFS [4]等等,均足以满足现实场景中实时跟踪的应用。 各算法执行速度: 各算法的主要思想: CN 跟踪器是CSK [5]跟踪器的改进算法。它联合颜色特征(ColorName )和灰度特征来描述目标,在文献[1]作者通过大量的实验证明了Color Name 在视觉跟踪中的卓越性能,并且对ColorName 进行了PCA 降维,去除了ColorName 中的冗余信息,使得对目标的外观描述更加精确和鲁棒。在分类器的训练中,在CSK 算法的代价函数的基础上引入一个固定的权值β,使得分类器的训练和更新更加准确和鲁棒。CN 跟踪器对很多复杂的视频序列都有很好的跟踪结果,比如:光照变化,遮挡,非刚性形变,运动模糊,平面内旋转,出平面旋转和背景杂乱。CN 跟踪器也有不足的地方,比如:尺度变化,快速运动,出视角和低分辨率,等视频的跟踪效果不佳。 KCF 跟踪器是原CSK 跟踪器的作者对CSK 跟踪器的完善,这里简单介绍一下CSK 跟踪器的主要思想。CSK 跟踪器最大亮点就是提出了利用循环移位的方法进行稠密采样并结合FFT 快速的进行分类器的训练。稠密采样的采样方式能提取目标的所有信息,这对目标的跟踪至关重要。虽然CSK 的速度很快,但是CSK 只是简单的使用了灰度特征,对目标的外观描述能力显然不足。对此作者改进了CSK 提出了KCF ,从原来的单通道灰度特征换成了多通道Hog 特征。KCF 算法通过核函数对多通道的Hog 特征进行了融合,使得训练所得的分类器对待检测目标的解释力更强。KCF 跟踪器对光照变化,遮挡,非刚性形变,运动模糊,背景杂乱和旋转等视频均能跟踪良好,但对尺度变化,快速运动,刚性形变等视频跟踪效果不佳。 STC 跟踪器是一个简单快速而且鲁棒的算法,它利用稠密的空时场景模型来进行跟踪。在贝叶斯框架下,它利用目标和目标局部的稠密信息的空时关系来建模。置信图在被计算时考虑了上一帧目标的位置的先验信息,这有效的减轻了目标位置的模糊。STC 跟踪器使用了最简单的灰度特征,但是灰度并不能很好对外观进行描述。这里可以改进为其他比较好的特征(Colorname 或者Hog ),但是就会遇到多通道特征融合的问题。一般的Tracking-by-Detection 跟踪算法基本都不能实现尺度的变化,而STC 跟踪器就提出了一种有效的尺度变化方案,也是文章[3]中最大的亮点。这里简单介绍一下,通过连续两帧的目标最 佳位置t x *处的置信值()t m x *的比值来计算当前帧中目标的估计尺度 ()()()12' 1t t t s m x m x ** -=,为了不引入噪声和避免过度敏感的自适应引入连续n 帧的平均估 计尺度'1 1n t t i i s s n -==∑,最后通过滤波获得最终的目标估计尺度()11t t t s s s λλ+=-+。STC
一、水声定位技术简介 自从1912年在美国出现了第一台水声测深仪以后,开始有了水声助航设备。二战中,对水下目标的探测和测量受到了重视,并在战后得到了迅速的发展。1958年,美国华盛顿大学应用物理实验室在达波湾建成了三维坐标跟踪水下武器靶场。这种水下定位跟踪技术在六十年代后期得到广泛应用,成为鱼雷靶场的主要测试方法。迄今为止,国内外水下武器靶场使用的水下定位跟踪系统有多种类型,按其安装方式可分为固定式跟踪系统、活动式(船载)跟踪系统和轻便式跟踪系统。固定式跟踪系统的水下测量设备大多数固定在海底,其范围大、费用高,只能在固定海区使用;活动式跟踪系统的全部设备都固定安装在活动平台上,试验时随活动平台开往试验海区;轻便式跟踪系统的体积和重量相对较小,可以随时布放和回收,并可通过飞机、车辆和船只从一个试验区运送到另一个试验区。这三种水下定位跟踪系统虽然在结构上有较大差别,但在原理上均是依赖于几何原理的水声学定位方法。根据接收基阵的基线可以将水声定位技术分为三类:长基线(LongBase-Line)、短基线(Short Base-Line)、超短基线(Ultra Short Base-Line)。表1.1列举了这三种水声定位技术的典型基线长度。 目标声源到各个基元间的距离确定目标的位置。短基线水声定位系统的基阵长度一般在几米到几十米的量级,利用目标发出的信号到达接收阵各个基元的时间差,解算目标的方位和距离。超短基线定位系统的基阵长度一般在几个厘米到几十厘米的量级,它与前两种不同,利用各个基元接收信号间的相位差来解算目标的方位和距离。 若按照工作方式来划分,以上三种定位系统都可以选择使用同步信标工作方式或应答器工作方式。采用同步信标工作方式,要求在待测目标或测量船上都安装高精度同步时钟系统,信标按规定的时刻定时发射信号,并据此确定目标位置。应答器工作方式要求在应答和测量船上都安装询问(应答)发射机和接收机。 通常所说的水声定位系统所测得的目标位置统)结合起来进行坐标变换,就能得到水下目标在大地几何坐标中的位置或轨迹。坐标,都是相对于某一参照物的位置而言。这个参照物有时就是基阵的载体(通常相对坐标系的某一个轴线和舰船的艏艉线重合),它并不真正给出目标的大地几何坐标位置。然而水声定位系统和其他的导航系统(如近年来获得广泛应用的卫星导航定位系统)结合起来进行坐标变换,就能得到水下目标在大地几何坐标中的位置或轨迹。 二、水声定位系统 迄今为止,水下目标定位跟踪的主要手段仍是依赖于几何原理的水声学定位方法。通常用声基线的距离或激发的声学单元的距离来对声学定位系统进行分类。水声定位系统,根据所实施的原理和测量手段不同,又可分为“方位--方位”、“方位--距离”和“距离--距离”三种测量系统。大部分的长基线、短基线系统都属于后者。距离测量水声定位系统是通过测量水下声源所辐射的声信号从发射到接收所经历的时间及声速来确定声源到各接收点的距离,从而实现对目标进行定位的。
非视距传播环境下的AOA定位跟踪算法 摘要: 基于几何结构的单次反射统计信道模型,提出了一种在非视距(NLOS)传播环境下对移动台的到达角(AOA)的定位与跟踪算法。首先利用径向基函数(RBF)神经网络对NLOS 误差进行修正,再利用最小二乘(LS)算法进行移动台位置估计,然后配合相关检测距离门对移动台进行跟踪。仿真结果表明,该跟踪算法能够有效地实现移动台的静态定位与动态跟踪,且效果良好。 ?ス丶?词: 非视距;到达角;跟踪算法;神经网络;最小二乘法 ?ブ型挤掷嗪牛? TP929.53 文献标志码:A 英文标题 ?? AOA location and tracking algorithm in ??non??line??of??sight propagation environment ?び⑽淖髡呙? MAO Yong??yi 1,ZHANG Ying2 ?び⑽牡刂?(
1. Department of Postgraduate, Xi’an University of Posts and Telecommunications, Xi’an Shaanxi 710061, China??;?? 2. College of Communication and Information Engineering, Xi’an University of Posts and Telecommunications, Xi’an Shaanxi 710061, China 英文摘要 )?? Abstract: Based on Geometrically Based Single??Bounce (GBSB) statistical channel model, a Angel of Arrival (AOA)??based location and tracking algorithm in Non??Line??Of??Sight (NLOS) environment for Mobile Station (MS) was proposed in this paper. The algorithm using Radical Basis Function (RBF) neural network was able to correct the NLOS errors, and then the positions of MS could be estimated by Least??Square (LS) algorithm. Furthermore, cooperating with correlation detection gate, the MS was tracked by the algorithm. The simulation results show that the proposed algorithm can efficiently track the MS dynamically, and has good results. 英文关键词 ??Key words: Non??Line??Of??Sight (NLOS); Angel of Arrival (AOA);
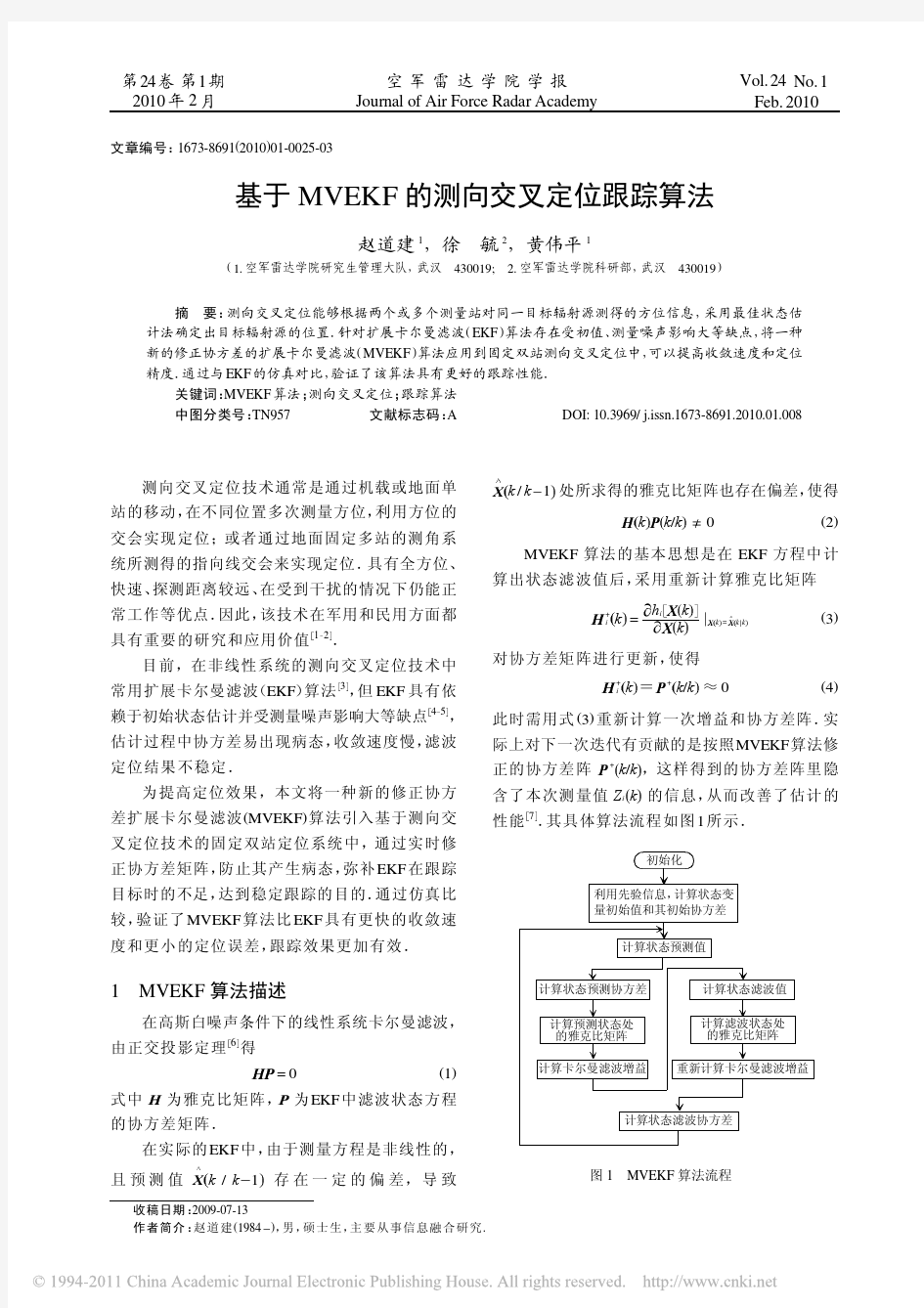
测向交叉定位
实验报告 实验内容测向交叉定位 姓名*** 单位*** 学号*** 实验环境MATLAB 实验时间**年**月**日 一.实验目的 1、掌握二维测向交叉定位方法; 2、掌握二维测向交叉定位的误差。 二.实验内容 设定两个测向站,设置其位置坐标参数,对辐射源的测向角度。分别给定出真实值和测量值(包含误差),并且分别计算出辐射源的理论位置和测量位置,二者进行比较并且计算出圆概率误差CEP和定位模糊区大小和位置误差。 三.实验原理 1.测向原理 二维平面测向定位:在已知的两个或多个不同位置上测量雷达辐射电磁波的方向,各站测得的雷达方向数据按三角测量法交会计算出雷达的位置(图1)。雷达与两个测量站的距离分别为
若已知两个侦察站的位置为1 1 (,)x y 和2 2 (,)x y ,由它 们对辐射源E 测向,测得的方位角分别为1 θ和2 θ (由方位基准逆时针为正向),并得到两条位置线即等方位线,利用两条位置线相交所得的交点即可确定辐射源的坐标位置(,)e e x y 。 1 11 1 e e y y tg m x x θ-==- 2 22 2 e e y y tg m x x θ-==- 由于1 1 (,)x y 和2 2 (,)x y 的两个坐标位置是已知的,而1 θ 和2 θ是测得的,即1 m 和2 m 可以测量得到。则可以得到辐射源位置: 1 112211e e x m b y m b --?????? =??????-???? ?? 2. 圆概率误差为 22 222112 0.7511 0.75sin()sin sin xe ye h CEP θσσσθθθθ≈+= + - 当1 55 θ ≈,2 125 θ ≈时,CEP 达到最小值,此时 22 22 CEP K θθ≈≈
关于水声被动定位技术及其发展趋势 导读:世界各国都加紧了对被动定位技术的研究和开发。匹配场声源定位是国际上新兴的水声定位方法。水下GPS技术的设计灵感来自于GPS,该技术可以用于潜艇定位。动目标分析,水声被动定位技术及其发展趋势。关键词:被动定位,匹配场,水下GPS,动目标分析 1.引言声纳按照工作方式一般分为主动声纳 和被动声纳。对于被动声纳,由于它不发射声波,它具有很好的隐蔽性,且具有作用距离远、不容易被发现等优点,在军事领域中有着很好的应用前景。近年来,世界各国都加紧了对被动定位技术的研究和开发,被动定位技术受到广泛的重视。随着水中兵器作用距离和打击精度的提高,对被动声纳的定位性能提出了更高的要求,远程定位问题引起人们的广泛关注,出现了多种新型的定位方法。 2.传统被动声纳定位技术及面临的问题 传统的被动定位技术 传统的水声被动定位技术是六十年代研究开发出来的,这类定位技术利用沿不同距离路径传播的水下声脉冲间的时间差或相位差对水面、水中目标进行定位,其典型代表就是三子阵法和球面内插法。三子阵被动测距方法是己经实用化了的被动定位技术,它是六十年代后期出现的噪声测距方法。它利用时延估计技术求出到达三个基阵的相对时延,然后得到目标的方位和距离。但是,三子阵定位方法对水声信道进行了简化,三子阵系统是在同一平面内进行定位的,它不考虑信道声速的垂直分布,也不考虑信道的多途效应。,动目标分析。,动目标分析。不过这种定位方法算法简单,而且对近距离声源定位能达到较高的精度,目前在工程上已经得到广泛应用。 传统被动声纳定位技术面临的问题 传统被动定位方法在理论和实际应用中都存在很大的缺陷,主要表现在以下两个方面。 远程定位精度不高 传统的被动定位方法,利用球面波或柱面波波前曲率的变化,通过测量各基元的相对时延,估计目标的距离和方位。测距精度与时延估计精度、目标距离、方位、基阵孔径、基阵安装精度等因素有关,其中时延测量精度是关键,然而对于
目标定位跟踪算法及仿真程序 质心算法是最简单的定位算法,如图2-1所示,四个小圆为观测站,实线三角形是目标真实的位置,假设四个圆形观测站都探测到目标的存在,则根据质心定位算法,目标的位置(x,y )可以表示为:4 4 321x x x x x +++= , 4 4 321y y y y y +++= ,这里观测站得位置为),(i i y x ,同理,当观测站数目为N 时,这时候的质心定位算法可以表示为: ???? ? ??? ????=??????∑ ∑ ==N i i N i i y N x N y x 1 1 11 图1 质心定位 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % 质心定位算法Matlab 程序 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function main % 定位初始化 Length=100; % 场地空间,单位:米 Width=100; % 场地空间,单位:米 d=50; % 目标离观测站50米以内都能探测到,反之则不能 Node_number=6; % 观测站的个数 for i=1:Node_number % 观测站的位置初始化,这里位置是随机给定的 Node(i).x=Width*rand; Node(i).y=Length*rand; end % 目标的真实位置,这里也随机给定 Target.x=Width*rand; Target.y=Length*rand; % 观测站探测目标 X=[]; for i=1:Node_number
邮局订阅号:82-946120元/年技术创新 软件时空 《PLC 技术应用200例》 您的论文得到两院院士关注 基于光流的运动目标检测跟踪快速算法 The Fast Algorithm Based on Optical Flow for Tracking Moving Targets (装甲兵工程学院) 关兴来谢晓竹 GUAN Xing-lai XIE Xiao-zhu 摘要:采用光流算法对运动目标进行识别跟踪,其优点是能够适应复杂的背景条件,并且能保证目标分割的完整性,但现有的按照光流矢量对目标进行跟踪的算法有明显的局限性:运算量过大,并且不适用与运动特征复杂的目标。对现有算法进行改进,采用均值平滑算法和基于光流绝对值的区域分割算法,可以有效解决这两个问题。关键词:光流;运动目标;图像分割中图分类号:TP391.4文献标识码:A Abstract:Using optical flow algorithm for identification and tracking moving targets,the advantage is the ability to adapt to the com -plex background conditions,and can ensure the integrity of the target partition,but the existing target tracking algorithm based on op -tical flow vector has obvious limitations:excessive operation,and does not apply and movement characteristics of complex targets.Im -provements to existing algorithms,using the pyramid optical flow-based smoothing algorithm and the absolute value of the region seg -mentation algorithm can effectively solve these two problems.Key word:Optical flow;Kinetic target;Image segmentation 文章编号:1008-0570(2012)10-0421-03 图像序列中的运动目标检测跟踪是指在图像序列中将前景运动区域从背景中提取出来。图像序列中检测运动目标,主要有图像差分法(帧间差分和背景差分)、光流场的方法、统计模型的方法、运动能量的方法、小波变换的方法等。其中,光流场的方法是利用运动物体随时间变化在图像中表现为速度场的特性,根据一定的约束条件估算出运动所对应的光流,然后根据光流矢量对图像中的目标进行检测,将目标从背景中分割出来。与其它方法相比它的优点是可以避免分割目标不完整的情况,因此得到越来越广泛的应用。 但现有的基于光流算法同样存在以下缺陷: 一是求稠密光流算法过于复杂。图像金字塔法的计算过程过于复杂,求出图像的金字塔的计算量非常大,而且对金字塔的每层图像均需要重新求其光流值。因此,这种经典的求稠密光流的方法运算时间过长,实时性较差。 二是不能适用于特征复杂的运动目标。例如:一个人在走路时,其身体各个部位的光流矢量值是不同的。对此类目标,如果仅仅根据光流矢量判断分割目标,很容易出现错误分割的情况。 1基于光流的运动目标跟踪原理 基于光流的运动目标的检测跟踪流程包括求取稀疏光流,求取稠密光流和目标的分割标识等几个步骤。 目前,最常用的计算运动目标稀疏光流的算法是H-S 算法,此理论的前提是:运动目标的灰度在很短的间隔时间内保持不变;给定邻域内的速度向量场变化是缓慢的。算法具体原理如下: 首先是建立基本的光流约束方程,求稀疏光流。令 为时刻t 图像点(x,y)的灰度,u(x,y)和v(x,y)表示图像点(x,y)的水平和垂直移动速度,则可建立光流方程: (1) 其中,Jx 、Jy 和Jt 分别表示图像中像素灰度沿X,Y,T 方向的梯度。 由于给定邻域内的速度向量场变化是缓慢的,可利用这个条件来建立下面两个光流约束方程,即: (2)(3) HS 算法是将这两个方程与光流方程结合,通过解最小化问题得出下面两个迭代公式: (4)(5) 上面公式(4)(5),就是H-S 法求光流的迭代公式,一般情况下,需要迭代20次以上,才能求出精度较高的光流值。 通过H-S 算法计算的光流仅仅是稀疏光流,为了将整个目标的完整轮廓描绘出来,需要计算出目标的稠密光流。求稠密光流可采用图像金字塔法:图像金字塔是一系列以金字塔形状排列的分辨率逐步降低的图像集合。先使用金字塔上较低的分辨率图像来求其光流值,然后再逐步求较高分辨率的光流。在计算出稠密光流后,就可以将目标从背景中分割出来,实现对目标的检测和跟踪。 2对基于光流的目标跟踪算法的改 进 上面的算法存在计算复杂和无法跟踪复杂运动状态目标这两个缺陷,可通过对算法进行改进解决这两个问题。改进的思想是,不再将光流矢量做为分割目标的特征,而是将光流取绝对值,根据光流绝对值值的大小,按照基于区域分割的原理,设置相应的阈值,对运动目标进行分割,然后使用均值平滑算法,求出运 关兴来:工程师硕士研究生 421--
实验报告 一.实验目的 1、掌握二维测向交叉定位方法; 2、掌握二维测向交叉定位的误差。 二.实验内容 设定两个测向站,设置其位置坐标参数,对辐射源的测向角度。分别给定出真实值和测量值(包含误差),并且分别计算出辐射源的理论位置和测量位置,二者进行比较并且计算出圆概率误差CEP和定位模糊区大小和位置误差。 三.实验原理 1.测向原理 二维平面测向定位:在已知的两个或多个不同位置上测量雷达辐射电磁波的方向,各站测得的雷达方向数据按三角测量法交会计算出雷达的位置(图1)。雷达与两个测量站的距离分别为
若已知两个侦察站的位置为11(,)x y 和22(,)x y ,由它们对辐射源E 测向,测得的方位角分别为1θ和2θ(由方位基准逆时针为正向),并得到两条位置线即等方位线,利用两条位置线相交所得的交点即可确定辐射源的坐标位置(,)e e x y 。 1111e e y y tg m x x θ-==-2 222 e e y y tg m x x θ-==- 由于11(,)x y 和22(,)x y 的两个坐标位置是已知的,而1θ和2θ是测得的,即1m 和2m 可以测量得到。则可以得到辐射源位置: 1 112211e e x m b y m b --?????? =??????-???? ?? 2. 圆概率误差为 CEP ≈= 当155θ≈ ,2125θ≈ 时,CEP 达到最小值,此时22CEP K ≈≈3. 定位模糊区 2221232112214()4() 4sin sin()sin sin sin() R R th uv h tg A θθθθθθθθθ??=== -- 当1=60θ ,2=120θ 时,A 达到最小值,此时22 22min 3 4()62()(sin 60) h tg A h tg θθ?==? 4. 位置误差 测得的位置与真实位置之间的距离r 成为位置误差。 222 22 112212123 232cos (sin )R R R R r θθθθθθ?+?+??= 2222 31211[](sin )(sin )(sin ) r h θσσθθθ=+
4.1.跟踪算法的基本流程 在本文的智能视频监控系统中,运动目标跟踪的基本流程如图4.1所示。 主要包括以下几个部分: (1)运动目标检测部分:在视频图像中定位、检测运动目标; (2)建立目标模板部分:根据检测到的目标,提取其特征建立跟踪模板; (3)目标运动预测部分:利用预测算法预测目标可能出现的位置; (4)运动目标跟踪部分:在预测范围内,利用跟踪算法搜索匹配的运动目标; 如果在预测范围内找到与目标模板匹配的目标,则更新该模板;否则建立 一个新的模板。 运动目标检测 图4.1本文的目标跟踪算法结构框图 4.2.Mean Shift算法 Mean Shifl这_个概念最早是有Fukunaga和Hostetle于1975年提出的一种无参嚣;| 一板]l_]一 ~ 一竺竺~~模一皈I| 一 王一目|! 离一 估计算法,其主要思想是沿着概率梯度上升的方向找到分布的峰值,即寻找极 值【61】;1 995年,Yizong Cheng等人定义了一簇核函数,并且设定了权重系数,这大大扩展了该算法的适用范围并使得其逐渐被不同领域所应用;自1 998年开 始,该算法被Bradski应用于人脸跟踪,其在目标跟踪领域的优势显现出来,并 不断被应用在目标跟踪的各个领域中‘621。 在Mean shift算法中非常重的一个概念就是核函数。其定义为:若函数K: 当X—R,存在剖面函数k:【0,叫一R,即式4.1: K(x)=k(㈣x 2) (4.1) 核函数必须是一个非负非增函数,并且是分段连续的,同时满足式4.2: 【k(r)dr 无源探测技术作业 主讲老师:成萍 作者 无源探测技术中测向交叉定位方法原理及应用 1、无源探测技术简介 现代化战争是高科技的战争。为了在战争中彻底准确摧毁敌方有生力量,瓦解敌方的战斗体系,保障我方部属安全,就需要知道敌方的准确位置。于是,定位技术成为现代战争体系中一项必不可少的关键技术,作为电子对抗的重要组成部分,一直受到人们的关注。 所谓定位是指,由单个或多个分布式的有源或无源探测器,通过探测目标(散射体或辐射体)反射或发射的信号,分析信号中的数据和有关参数,应用合适的数据处理方法,估计出目标在空间中的位置。通常,按探测器种类划分,定位可分为有源和无源两大类。有源定位指探测器自身要发射电磁波,通过接收目标的反射波和相关信息进行定位,其中最主要的就是雷达对抗技术。从最近几次高科技局部战争来看,针对传统雷达的电子干扰和抗干扰斗争愈发激烈,参战单位更注重隐身,反辐射导弹成为新宠,同时低空突防技术也获得更大发展。这些都使得传统雷达探测定位技术面临的障碍不断增加,使人们意识到必须发展新的定位技术。无源定位因此深受青睐,其发展速度一直呈上升趋势。所谓无源定位就是指,探测器自身不发射电磁波,仅利用目标本身辐射或散射第三方辐射波进行定位。相对于有源定位,其具有隐蔽性和反电子侦察能力强的突出优点,从而成为现代战争中机载对敌、对海攻击以及对付隐身目标的远程预警系统的重要组成部分,大大提高了战斗系统在电子战环境下的生存能力和作战能力。 相对于传统的有源定位系统,无源定位系统有以下四大优点: 1、最大的优点在于工作时本身不发射电磁能量,具有良好的隐蔽性,能有效地抵抗反辐射导弹和反侦察定位系统,生命力强,适应环境快。 2、无源定位技术与收发分置的双基或多基雷达系统类似,且工作在甚高频和超高频,因此能更有效地对隐身目标进行探测定位。 3、无源雷达系统自身不发射信号,省去了昂贵的高功率发射机和收发开关及相关电子设备,使系统制造和维护成本大幅降低。当前,世界上一些国家在新型功率器件方面对我国采取禁运的手段,因此此项优点对我国情况有很大吸引力。 4、外辐射源的天线都设置在贴近地面的高处,因此对低空飞行的飞机和巡航导弹有利,具有良好的抗低空突防性能。 测向交叉定位实验报告 一、 实验目的 1、通过实验进一步加深对二维平面内测向交叉定位原理的理解; 2、通过实验掌握利用最小二乘法提高二维平面内测向交叉定位精度的方法; 3、提高Matlab 编程能力。 二、实验原理 已知两个侦察站的位置(X 1,y 1)和(x 2,y 2),由于它们对辐射源E 测向,测得的方位角分别为1θ与2θ并得到两条位置线即等方位线,利用两条位置线相交所得的交点即可确定辐射源的坐标位置(x e ,y e ),如图1。从图可知: 1 111 y e e y tg m x x θ-==- 2 222 y e e y tg m x x θ-==- 由于(x 1,y 1)和(x 2,y 2)的两个坐标是已知的,而1θ与2θ是测得的,即m 1和m 2是可以测得到。现把已知量和未知量左右分开可得: 11111e e y m x y m x b -=-= 22222e e y m x y m x b -=-= 则得 112211e e x m b y m b -??????=??????-???? ?? 即 1 112211e e x m b y m b --??????=??????-???? ?? 121122 21 e y y m x m x x m m --+= - 2112121122 21 e m y m y m m x m m x y m m --+= - 三、定位误差分析 上式是不考虑测向误差和侦察站的位置误差情况下求得的辐射源位置,实际上测向和测量侦察站的位置都是有误差的,由于这些误差的存在,将影响定位精度,下面分析园概率误差,研究辐射源的定位精度与测向误差及侦察站位置配置的关系。 由于测量误差是随机的,因此辐射源的位置也是随机的,它一般符合二维正态分布,当测量误差服从正态分布时,常用中间误差E 的大小来表示测度精度。中间误差E 可由误差落在-E 与E 范围的概率为1/2时求得:即 22 ()21()2 x a E E E E f x dx e dx σ-- --= = ? 则 E == 其中E 称为中间误差,又称分算误差,E 愈小表示测量精度愈高。 当定位误差服从二维正态分布且x 和y 彼此独立时,其二维概率密度函数为: 22221()()21(,)2x y x x y y x y f x y e σσπσσ??--?? -+??????= 其中x 和y 分别为随机变量x 、y 的均值,2x σ和2 y σ分别为随机变量x 、y 的方差。 为了讨论方便,设x =y =0,并把x 、y 坐标换为极坐标系,则 cos sin x r y r dxdy J drd =Φ =Φ=Φ 其中 cos sin sin cos x x r ar J r y y r r φφφ φ φ φ ??-= = =?? 基于光流的运动目标检测跟踪快速算法 关兴来;谢晓竹 【期刊名称】《微计算机信息》 【年(卷),期】2012(000)010 【摘要】Using optical flow algorithm for identification and tracking moving targets, the advantage is the ability to adapt to the com- plex background conditions, and can ensure the integrity of the target partition, but the existing target tracking algorithm based on op- tical flow vector has obvious limitations: excessive operation, and does not apply and movement characteristics of complex targets. Im- provements to existing algorithms, using the pyramid optical flow-based smoothing algorithm and the absolute value of the region seg- mentation algorithm can effectively solve these two problems.%采用光流算法对运动目标进行识别跟踪,其优点是能够适应复杂的背景条件,并且能保证目标分割的完整性,但现有的。按照光流矢量对目标进行跟踪的算法有明显的局限性:运算量过大,并且不适用与运动特征复杂的目标。对现有算法进行改进.采用均值平滑算法和基于光流绝对值的区域分割算法,可以有效解决这两个问题。 【总页数】3页(421-423) 【关键词】光流;运动目标;图像分割 【作者】关兴来;谢晓竹 【作者单位】装甲兵工程学院;装甲兵工程学院 本技术公开了一种定位追踪方法,信息终端通过定位系统,获得信息终端自身的位置信息,并且信息终端按照设定周期主动的将此位置信息和安全信息发送到中心系统,而一个或者多个监视设备通过此中心系统,获得所述信息终端当前的或者历史的位置信息和安全信息,且监视设备会将这些位置信息显示在监视设备的地图图形界面上;其中,以上所述的定位系统接收定位卫星的无线电信号,同时与互联网络上定位服务器进行交互得到信息终端自身的位置信息。本技术实现了对被监测设备的监控,且有效保证定位精度,数据的实时性和对信息终端的历史记录查询。 权利要求书 1.一种定位追踪方法,其特征在于,信息终端(1)通过定位系统,获 得信息终端自身的位置信息,并且信息终端(1)按照设定周期主动的将此位 置信息和安全信息发送到中心系统(3),而一个或者多个监视设备(4)通过 此中心系统(3),获得所述信息终端(1)当前的或者历史的位置信息和安全 信息,且监视设备(4)会将这些位置信息显示在监视设备(4)的地图图形 界面上; 其中,以上所述的定位系统接收定位卫星的无线电信号,同时与互联网 络上定位服务器(14)进行交互得到信息终端(1)自身的位置信息。 2.根据权利要求1所述的定位追踪方法,其特征在于,所述的信息终端(1),通过其上的卫星定位模块(11)接收定位卫星的信号,并根据接收到 的信号得到信息终端(1)的卫星定位数据,控制模块(13)通过无线模块(12) 将卫星定位数据发送给定位服务器(14),定位服务器(14)上的辅助定位算 法使用卫星定位数据,根据当前星历帮助卫星定位输出信息终端的位置信息,同时定位系统用此位置信息校准基站定位方法输出的信息终端位置信息,将校准的结果纪录在定位服务器(14)中的位置数据库中,并将校准的结果作 为定位系统的输出;当卫星定位模块(11)捕获不到卫星时,卫星定位输出 的位置信息保持不变,定位系统根据当前基站输出的位置信息和卫星定位输出的位置信息查询定位服务器(14),将定位服务器(14)的输出位置信息作 为定位系统的输出。 3.根据权利要求2所述的定位追踪方法,其特征在于, 所述的信息终端(1)中的无线模块(12),通过基站(2)和网络与定位 服务器(14)和中心系统(3)建立链接,信息终端(1)通过其上的卫星定 位模块(11)及定位服务器(14)得到其自身的位置信息,信息终端(1)中 的控制模块(13)按照设定周期周期性的将信息终端的位置信息和信息终端 的标识信息通过无线模块(12)及基站(2)发送到中心系统(3),且在无线 链路无法建立的情况下,存储信息终端(1)的当前位置信息; 所述的中心系统(3)将被监控接口接收到的信息终端的当前位置信息及 信息终端的标识信息存入其内部的数据库模块,并从数据库模块中根据信息 (19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910153596.1 (22)申请日 2019.02.28 (71)申请人 天津大学 地址 300072 天津市南开区卫津路92号 (72)发明人 董丽双 刘敬浩 付晓梅 (74)专利代理机构 天津市北洋有限责任专利代 理事务所 12201 代理人 李林娟 (51)Int.Cl. G01S 5/22(2006.01) (54)发明名称 一种基于接收信号强度的多目标水声定位 方法 (57)摘要 本发明公开了一种基于接收信号强度的多 目标水声定位方法,所述方法包括以下步骤:建 立基于压缩感知的多目标定位传感网络模型;利 用声源节点与接收节点之间的距离构造正交化 测量矩阵;基于正交化测量矩阵重构原始稀疏向 量,三边定位法求解目标的位置坐标,通过多目 标定位传感网络模型完成声源节点的定位。本发 明将压缩感知理论应用于定位算法中,利用接收 信号强度(RSS)实现水下声源目标节点的定位。权利要求书1页 说明书4页 附图2页CN 109932690 A 2019.06.25 C N 109932690 A 1.一种基于接收信号强度的多目标水声定位方法,其特征在于,所述方法包括以下步骤: 建立基于压缩感知的多目标定位传感网络模型;利用声源节点与接收节点之间的距离构造正交化测量矩阵; 基于正交化测量矩阵重构原始稀疏向量,三边定位法求解目标的位置坐标,通过多目标定位传感网络模型完成声源节点的定位。 2.根据权利要求1所述的一种基于接收信号强度的多目标水声定位方法,其特征在于, 所述多目标定位传感网络模型具体为: 其中,Y M 为以第M个接收节点作为参考节点时,接收节点的接收信号强度的比值向量,Φ为完整网络的测量矩阵,θ为表征声源节点位置信息的稀疏向量,W为噪声向量,ΦM 为以第M 个接收节点作为参考节点时的测量矩阵,通过求解θ中最大位置对应的网格点就是声源目标所在的位置。 3.根据权利要求2所述的一种基于接收信号强度的多目标水声定位方法,其特征在于, 所述正交化测量矩阵具体为: 其中,Y '为新的观测向量,表示多目标传感网络,Φ'是Φ的正交基,为Φ的广义逆矩阵,W '为正交化处理后的噪声向量。 权 利 要 求 书1/1页2CN 109932690 A无源探测技术大作业二测向交叉定位方法
测向交叉定位
基于光流的运动目标检测跟踪快速算法
定位追踪方法与制作流程
【CN109932690A】一种基于接收信号强度的多目标水声定位方法【专利】
相关主题
文本预览