4.1.跟踪算法的基本流程
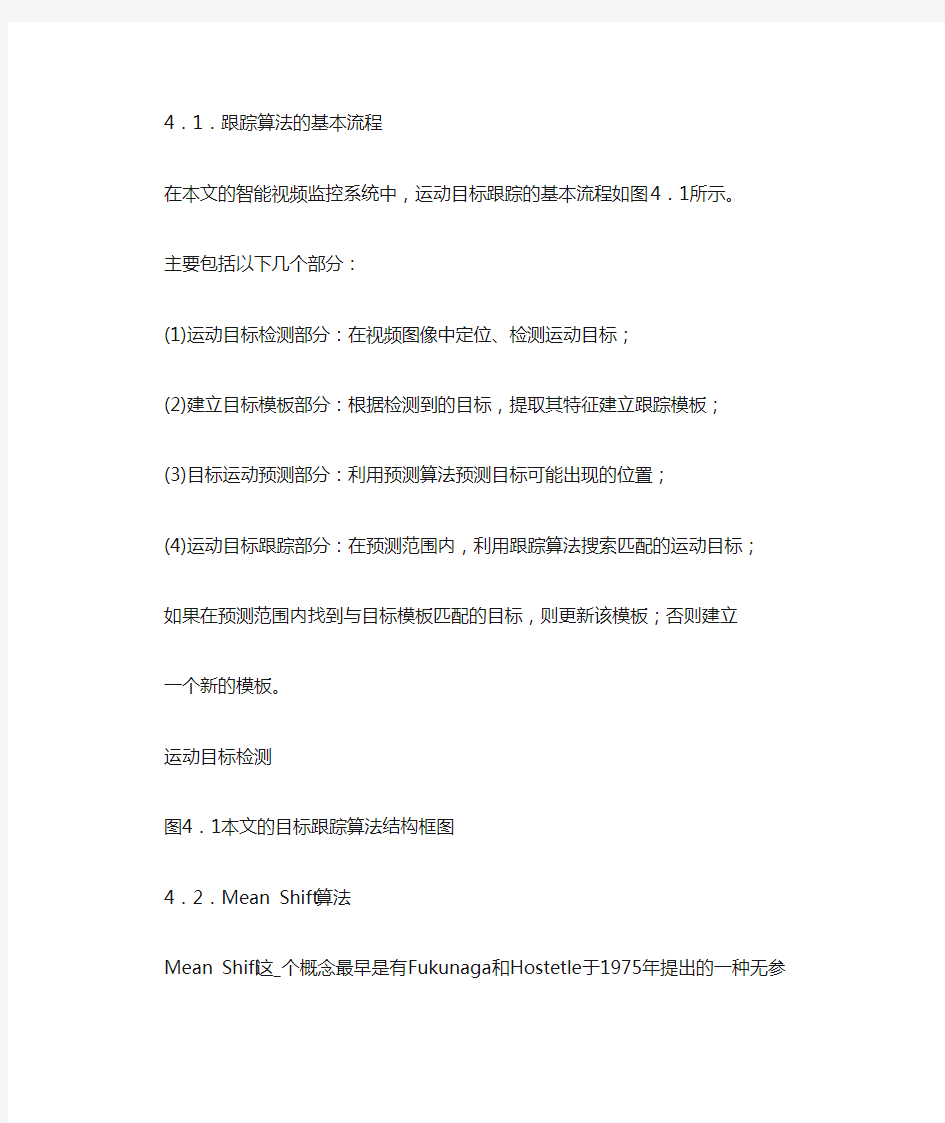
在本文的智能视频监控系统中,运动目标跟踪的基本流程如图4.1所示。
主要包括以下几个部分:
(1)运动目标检测部分:在视频图像中定位、检测运动目标;
(2)建立目标模板部分:根据检测到的目标,提取其特征建立跟踪模板;
(3)目标运动预测部分:利用预测算法预测目标可能出现的位置;
(4)运动目标跟踪部分:在预测范围内,利用跟踪算法搜索匹配的运动目标;
如果在预测范围内找到与目标模板匹配的目标,则更新该模板;否则建立
一个新的模板。
运动目标检测
图4.1本文的目标跟踪算法结构框图
4.2.Mean Shift算法
Mean Shifl这_个概念最早是有Fukunaga和Hostetle于1975年提出的一种无参嚣;|
一板]l_]一
~
一竺竺~~模一皈I|
一
王一目|! 离一
估计算法,其主要思想是沿着概率梯度上升的方向找到分布的峰值,即寻找极
值【61】;1 995年,Yizong Cheng等人定义了一簇核函数,并且设定了权重系数,这大大扩展了该算法的适用范围并使得其逐渐被不同领域所应用;自1 998年开
始,该算法被Bradski应用于人脸跟踪,其在目标跟踪领域的优势显现出来,并
不断被应用在目标跟踪的各个领域中‘621。
在Mean shift算法中非常重的一个概念就是核函数。其定义为:若函数K:
当X—R,存在剖面函数k:【0,叫一R,即式4.1:
K(x)=k(㈣x 2) (4.1)
核函数必须是一个非负非增函数,并且是分段连续的,同时满足式4.2:
【k(r)dr 常用的核函数有Epanechnikov核函数、单位均匀核函数、高斯核函数等, 其中由于Epanechnikov核函数能够产生最小平均积分平方误差(MISE),所以 在众多的跟踪方法中是最常使用的。其函数定义为: KE(x)={co_卜82) “乏熄1 (4.3) Mean Shift算法的实质是Mean Shift向量的转移过程。所谓Mean Shift向 量是通过核函数推导而来的。首先定义d维空间Ro中的样本集合为{Xi)i=l,...n, K(x)表示该空间的核函数,其窗131半径是h,则点X出的核密度估计是: m,=嘉喜文寻) ㈤4, K(x)的剖面函数k(x),其使得K(x)=k(1lxll2)。将上式的核密度估计写成剖面 函数形式: 觚垆嘉驯等『] ∽5, V‰五 班“,”e㈤(=x堕)r三thd+2喜=vf”(x)=—盟Z(。一x砧t。蚓(0f t I÷等『0 ] ((44..6)) V夕九K cx ,=音等 等≥喜cx一一,g(8寻『]=妄等等 ≥[善g[|I 等『]]J粼一x f 36 上式中的第一项是在X处的基于核函数G(x)Ij9无参密度估计值。第二项则 是Mean Shift向量,表示的是以G(x)为权值加权平均值与X的差值。 通常,K(x)被称为是G(x)的阴影函数。根据推导可知,Epanechnikov核函 数是均匀核的影子,因此,若在目标跟踪中选用Epanechnikov核,其剖面函数 k(x)为: m)=悟0 II娈1 (4.8) 经过简单的推导,可以得到g(x)为: 贴)_-纵垆亿II裴1 (4.9) 将其带入到Mean Shift向量中,可以化简该向量,得到如下的形式: m(工)=去Σ&一x) (4.10) 从上式可以看出,选用Epaneclmikov核函数可以大大的减小计算复杂度, 这也是人们选用该核函数的一个重要原因。 Mean Shift算法是一个迭代的过程,它循环执行下面的步骤,直到满足一 定的条件,才‘结束循环: (1)计算H的值,H定义如下: H= “剜’] 刹斟] (4.11) (2)如果IIH .xll<£,则结束循环;否则继续执行步骤(1)。 上式中的£是指容许误差,当满足上述条件时,Mean Shift 过程结束,此 时Mean Shift 向量收敛到数据密度的峰值,并且其估计密度梯度为0。可以看 出,这个迭代过程就是不断的沿着概率密度的梯度方向移动,而其移动的步长 与梯度大小以及该点处的概率密度有关。经过试验验证,在梯度密度大的地方, 更接近概率密度的峰值,其移动步长较小;反之,在密度小的地方,移动步长 较大。因此,也可以认为Mean Shift 是一个步长可变的梯度上升算法【63|。 计算机图形学期末作业 作业题目:Ray Tracing算法的实现 姓名:李海广 学号:S130201036 任课教师:秦红星 摘要 Ray Tracing算法又叫光线跟踪算法,它能通过递归方法逐个计算每个像素点的光强,然后就可以绘制出高度真实感的图像,因此该方法在图形学领域得到了广泛的应用。Ray Tracing算法的思想还能应用到移动通信终端定位领域,该领域里的射线跟踪法与此算法思想类似。MFC是微软公司提供的一个类库,以C++类的形式封装了Windows的API,并且包含一个应用程序框架,以减少应用程序开发人员的工作量。其中包含的类包含大量Windows句柄封装类和很多Windows的内建控件和组件的封装类。MFC在处理Windows窗口应用程序方面具有很大的优势,因此,本文使用MFC在VC6.0里实现Ray Tracing算法,并给出了该算法的详细讲解。 【关键词】Ray tracing 光线跟踪递归像素光强 MFC C++ 目录 1.Ray Tracing算法概述 (1) 1.1Ray Tracing算法简介 (1) 1.2Ray Tracing算法的实现原理 (1) 2.Ray Tracing算法的具体实现 (2) 2.1算法的实现环境 (2) 2.2实现算法的C++程序简介 (2) 2.3算法的具体实现过程 (3) 2.4 程序运行结果 (11) 3.总结 (11) 3.1 通过该算法学到的东西 (11) 3.2本程序未完成的任务 (12) 4.参考文献 (12) 1.Ray Tracing算法概述 1.1Ray Tracing算法简介 光线跟踪(Ray tracing),又称为光迹追踪或光线追迹,它是来自于几何光学的一项通用技术,它通过跟踪与光学表面发生交互作用的光线从而得到光线经过路径的模型。它用于光学系统设计,如照相机镜头、显微镜、望远镜以及双目镜等。这个术语也用于表示三维计算机图形学中的特殊渲染算法,跟踪从眼睛发出的光线而不是光源发出的光线,通过这样一项技术将具有一定数学模型的场景显现出来。这样得到的结果类似于光线投射与扫描线渲染方法的结果,但是这种方法有更好的光学效果,例如对于反射与折射有更准确的模拟效果,并且效率非常高,所以在追求高质量结果时我们经常使用这种方法。 在光线跟踪的过程中,我们要考虑许多因素。要跟踪的光线包括反射光线、散射光线和镜面反射光线,利用递归方法并且设定一定的阀值来跟踪;在计算光强度时,我们要考虑场景中物体的反射系数、漫反射系数和镜面反射系数,还有交点处的法向量,出射光线的方向向量;在求视线以及反射光线和场景中物体的交点时,要计算出离眼睛以及出射点最近的交点作为击中点,得到击中点之后,我们就可以计算出击中点的坐标。最终,通过三个公式计算出每一个像素点处三种光线的光强值,再将三个光强值相加,就得到了该像素点出的总光强值,最后将颜色缓冲器中的三种颜色值输出到屏幕上,就得到了我们需要的光线跟踪图像。 1.2Ray Tracing算法的实现原理 (1)对图像中的每一个像素,创建从视点射向该像素的光线; (2)初始化最近时间T为一个很大的值,离视点最近的物体指针设为空值; (3)对场景中的每一个物体,如果从视点出发的光线和物体相交,且交点处的时间t比最近时间T小,则将t的值赋给最近时间T,并设置该物体为最近物体,将物体指针指向该物体; (4)经过第三步的计算后,如果最近物体指针指向空值NULL,则用背景色填充该像素。如果该指针指向光源,则用光源的颜色填充该像素; o Camshift 算法 引言 大多数特征跟踪算法的执行都遵循下图所示的目标预测——特征检测——模板匹配——更新四个步骤的闭环结构。首先,以前一帧目标位置和一些运动模型为基础,预测当前帧中目标的可能位置。接着,候选区域的特征和初始特征相匹配,通过优化匹配准则来选择最好的匹配对象,其相应的目标区域即为目标在本帧的位置。算法设计的不同常常由于选择什么特征、预测如何进行、如何选择匹配准则等的不同而不同。许多对目标跟踪算法的完善也是从这三个方面寻找改善措施的 。 除了位置更新步骤,其余三个步骤一般在一个迭代中完成。目标预测步骤主要基于目标的运动模型,运动模型可以是很简单的等速平移运动,也可以是很复 杂的曲线运动。特征检测步骤是在目标区域通过相应的图像处理技术获得特征值,组合成待匹配模板。 d h 模板匹配步骤是选择最匹配的待匹配模板,它的所在区域即是目标在当前帧的位置区域。一般以对目标表象的变化所作的一些合理的假设为基础,—个常用的方法是候选特征与初始特征的互相关系数最小。 三个步骤不断往复。更新步骤常常有两种,一是指对初始模板(特征)的更新,这是因为在目标的运动中,它的姿态、环境的照度等会发生变化,因此模板更新有利于跟踪的继续进行;二是指位置的更新,当在当前帧中找到与目标模板最匹配的模板后,常把该模板的中心位置作为目标在当前帧中的位置,并用该位置对目标的初始位置进行更新,作为下一帧处理时的目标初始位置。 1,Camshift原理 CamShift利用目标的颜色直方图模型将图像转换为颜色概率分布图,初始化一个搜索窗的大小和位置,并根据上一帧得到的结果自适应调整搜索窗口的位置和大小,从而定位出当前图像中目标的中心位置。 2,目标表示(颜色概率分布图) (1) RGB颜色空间对光照亮度变化较为敏感,为了减少此变化对跟踪效果的影响,首先将图像从RGB空间转换到HSV空间。 目录 1.目的 软件项目跟踪及监督的目的是在项目执行过程中为管理层就项目进展提供足够的透明度. 并当实际和计划发生显著偏差时为管理层采取及时的和必要的措施进行修正或纠正提供依据. 软件项目跟踪及监督包括对阶段性结果进行评估, 将实际进展和原有的估算、承诺和计划相比较, 并对相应的计划进行必要的修正和采取必要措施以保证项目的顺利进行. ?软件项目开发计划是项目跟踪的基础和依据. ?软件项目经理负责汇报项目的进展情况和存在的问题. ?如果项目计划不能达到,软件项目经理或直属部门经理必须采取相应的措施通过调整工作方式或调整设计等以确保项目的正常进行. ?当承诺或约定变更时,要重新协调所有的相关人员及部门. 可能包括客户经理、软件项目经理、配置管理人员、质量保证人员、项目组成员等. ?对外的承诺或约定的变化要经高级管理者批准. 软件项目跟踪与监督的内容主要包括: 软件的规模、工作量、成本、进度、资源、风险、技术活动、阶段报告、里程碑报告、结束总结报告、追踪问题、控 制变更等. 2.范围 本过程适用于新开发软件项目和具有开发计划的软件开发活动。. 3.职责 项目管理是由软件项目经理负责并和多方面密切配合的过程, 是团队合作和集体努力的结果. 相关职责如下: 3.1软件项目经理负责根据软件项目开发计划对项目实施跟踪、监督控制, 记录相 关的跟踪结果,并向研发经理负责; 3.2测试工程师负责产品测试并向质量测试经理和软件项目经理负责; 3.3配置工程师负责软件的配置和实施, 并向软件项目经理负责; 3.4质量保证工程师按质量保证计划实施质量保证活动,并向质量保证经理、软件 项目经理负责; 3.5 高级管理者负责解决项目内部无法解决的问题。 4.工作程序 软件项目经理负责组织项目的跟踪活动,选择和提供或请求足够的资源;必要时项目经理本人要接受项目管理方面的知识培训和对相关人员进行相关过程和标准的培训。 Camshift原理 camshift利用目标的颜色直方图模型将图像转换为颜色概率分布图,初始化一个搜索窗的大小和位置,并根据上一帧得到的结果自适应调整搜索窗口的位置和大小,从而定位出当前图像中目标的中心位置。 分为三个部分: 1--色彩投影图(反向投影): (1).RGB颜色空间对光照亮度变化较为敏感,为了减少此变化对跟踪效果的影响,首先将图像从RGB空间转换到HSV空间。(2).然后对其中的H分量作直方图,在直方图中代表了不同H分量值出现的概率或者像素个数,就是说可以查找出H分量大小为h的概率或者像素个数,即得到了颜色概率查找表。(3).将图像中每个像素的值用其颜色出现的概率对替换,就得到了颜色概率分布图。这个过程就叫反向投影,颜色概率分布图是一个灰度图像。 2--meanshift meanshift算法是一种密度函数梯度估计的非参数方法,通过迭代寻优找到概率分布的极值来定位目标。 算法过程为: (1).在颜色概率分布图中选取搜索窗W (2).计算零阶距: 计算一阶距: 计算搜索窗的质心: (3).调整搜索窗大小 宽度为;长度为1.2s; (4).移动搜索窗的中心到质心,如果移动距离大于预设的固定阈值,则重复2)3)4),直到搜 索窗的中心与质心间的移动距离小于预设的固定阈值,或者循环运算的次数达到某一最大值,停止计算。关于meanshift的收敛性证明可以google相关文献。 3--camshift 将meanshift算法扩展到连续图像序列,就是camshift算法。它将视频的所有帧做meanshift 运算,并将上一帧的结果,即搜索窗的大小和中心,作为下一帧meanshift算法搜索窗的初始值。如此迭代下去,就可以实现对目标的跟踪。 算法过程为: (1).初始化搜索窗 (2).计算搜索窗的颜色概率分布(反向投影) (3).运行meanshift算法,获得搜索窗新的大小和位置。 项目跟踪流程表 项目名称__________________________项目所在地区___________________ 项目代号___________________总承包方______________________________ 项目报价人员_______________所在部门______________________________ 一、项目立项 1、项目立项的成功标准: 项目立项的里程碑是;通过公司项目流程筛选,并在内部准备跟踪。 2、项目立项的符合条件: (1)收集信息,并完整填写《项目立项申请表》; (2)按项目立项流程上报; (3)审批通过并执行。 3、实际情况:(由营销人员填写) 4、判断:(由营销人员、部门主管、销售经理、总经理分别填写) 营销人员: 部门主管: 销售经理: 总经理: 5、跟进措施:(由营销人员、部门主管、销售经理、总经理分别填写) 营销人员: 部门主管: 销售经理: 总经理: 项目立项申请表 二、初步接触 1、电话邀约的成功标准: 电话邀约不仅仅是为了能够了解客户信息,能够给客户留下好的第一印象,而是能够让客户知道产品或服务带给他的价值,更重要的是电话邀约的目的是为了能向下一环节推进。 无论谈话进行得多么顺利,无论你的联系人表现得多么友善,如果没有进一步发展的机会,没有承诺合作的意向,则该客户仅仅是潜在的客户。每一步骤的目的是为了将向潜在客户进行销售的过程向下个环节推进,所以如果客户明显表现出对提供方案的兴趣,则说明我们可以进入下个环节了。 2、电话邀约要符合的条件: (1)已经符合目标客户的选择标准; (2)对方至少是经手人士; (3)客户对项目比较有兴趣了解,而且一定会慎重考虑; (4)已经与经手人士确认好具体时间、地点等; (5)对方比较积极,而非强迫性的互动行为。 3、上门拜访的成功标准: 通过拜访建立初步客户关系,使双方都有建设性的意向,同时,客户提及初步方案,准备向相关部门进行汇报。 4、上门拜访要符合的条件: (1)找对合格的经手人士; (2)推荐公司在技术能力上的优势; (3)明确客户内部的采购流程,特别是可能的项目负责人; (4)建立并发展与经手人士的关系; (5)双方达成共识,可以招投标方案设计。 5、实际情况:(由营销人员填写) 6、判断:(由营销人员、部门主管、销售经理、总经理分别填写) 营销人员: 部门主管: 销售经理: 总经理: 7、跟进措施:(由营销人员、部门主管、销售经理、总经理分别填写) 营销人员: 部门主管: 销售经理: 总经理: 客户基本信息表联系人基本信息表客户拜访总结报告 客户内部采购流程表客户内部与采购有关人的角色与态度 建立客户关系评估分析表强化客户关系计划表(上门拜访 客户内部人员相关合作及报告关系表 三、方案设计 1、方案设计的成功标准: 通过初步方案的访谈,深入并扩展营销开发关系,使更多的人认同目前的方案,同时经手人士给予积极的评价,承诺进行业绩展示。 光线投射,光线追踪与路径追踪的概念与区别 光线投射Ray Casting [1968] 光线投射(Ray Casting),作为光线追踪算法中的第一步,其理念起源于1968年,由Arthur Appel在一篇名为《Some techniques for shading machine rendering of solids》的文章中提出。其具体思路是从每一个像素射出一条射线,然后找到最接近的物体挡住射线的路径,而视平面上每个像素的颜色取决于从可见光表面产生的亮度。 光线投射:每像素从眼睛投射射线到场景 光线追踪Ray Tracing [1979] 1979年,Turner Whitted在光线投射的基础上,加入光与物体表面的交互,让光线在物体表面沿着反射,折射以及散射方式上继续传播,直到与光源相交。这一方法后来也被称为经典光线跟踪方法、递归式光线追踪(Recursive Ray Tracing)方法,或Whitted-style 光线跟踪方法。 光线追踪方法主要思想是从视点向成像平面上的像素发射光线,找到与该光线相交的最近物体的交点,如果该点处的表面是散射面,则计算光源直接照射该点产生的颜色;如果该点处表面是镜面或折射面,则继续向反射或折射方向跟踪另一条光线,如此递归下去,直到光线逃逸出场景或达到设定的最大递归深度。 经典的光线追踪:每像素从眼睛投射射线到场景,并追踪次级光线((shadow, reflection, refraction),并结合递归 光线追踪(Ray tracing)是三维计算机图形学中的特殊渲染算法,跟踪从眼睛发出的光线而不是光源发出的光线,通过这样一项技术生成编排好的场景的数学模型显现出来。这样得到的结果类似于光线投射与扫描线渲染方法的结果,但是这种方法有更好的光学效果,例如对于反射与折射有更准确的模拟效果,并且效率非常高,所以当追求高质量的效果时经常使用这种方法。 TLD目标跟踪算法 一、算法的背景 TLD(Tracking-Learning-Detection)是英国萨里大学的一个捷克籍博士生Zdenek 出的一种新的单目标长时间(long term tracking)跟踪算法。该算法与传统跟踪算法的显著区别在于将传统的跟踪算法和传统的检测算法相结合来解决被跟踪目标在被跟踪过程中发生的形变、部分遮挡等问题。同时,通过一种改进的在线学习机制不断更新跟踪模块的“显著特征点”和检测模块的目标模型及相关参数,从而使得跟踪效果更加稳定、鲁棒、可靠。 对于长时间跟踪而言,一个关键的问题是:当目标重新出现在相机视野中时,系统应该能重新检测到它,并开始重新跟踪。但是,长时间跟踪过程中,被跟踪目标将不可避免的发生形状变化、光照条件变化、尺度变化、遮挡等情况。传统的跟踪算法,前端需要跟检测模块相互配合,当检测到被跟踪目标之后,就开始进入跟踪模块,而此后,检测模块就不会介入到跟踪过程中。但这种方法有一个致命的缺陷:即,当被跟踪目标存在形状变化或遮挡时,跟踪就很容易失败;因此,对于长时间跟踪,或者被跟踪目标存在形状变化情况下的跟踪,很多人采用检测的方法来代替跟踪。该方法虽然在某些情况下可以改进跟踪效果,但它需要一个离线的学习过程。即:在检测之前,需要挑选大量的被跟踪目标的样本来进行学习和训练。这也就意味着,训练样本要涵盖被跟踪目标可能发生的各种形变和各种尺度、姿态变化和光照变化的情况。换言之,利用检测的方法来达到长时间跟踪的目的,对于训练样本的选择至关重要,否则,跟踪的鲁棒性就难以保证。 考虑到单纯的跟踪或者单纯的检测算法都无法在长时间跟踪过程中达到理想的效果,所以,TLD方法就考虑将两者予以结合,并加入一种改进的在线学习机制,从而使得整体的目标跟踪更加稳定、有效。 简单来说,TLD算法由三部分组成:跟踪模块、检测模块、学习模块;如下图所示 其运行机制为:检测模块和跟踪模块互补干涉的并行进行处理。首先,跟踪模块假设相邻视频帧之间物体的运动是有限的,且被跟踪目标是可见的,以此来估计目标的运动。 如果目标在相机视野中消失,将造成跟踪失败。检测模块假设每一个视帧都是彼此独立的,并且根据以往检测和学习到的目标模型,对每一帧图片进行全图搜索以定位目标可能出现的区域。同其它目标检测方法一样,TLD中的检测模块也有可能出现错误,且错误无非是错误的负样例和错误的正样例这两种情况。而学习模块则根据跟踪模块的结果对检测模块的这两种错误进行评估,并根据评估结果生成训练样本对检测模块的目标模型进行更新,同时对跟踪模块的“关键特征点”进行更新,以此来避免以后出现类似的 建设工程全过程跟踪审计 编辑:尚凤国 赤峰天骄建设工程造价咨询有限责任公司 概述 一、全过程跟踪控制审计相关法律、法规依据 二、建设工程全过程跟踪审计的目的 三、审计模式 四、跟踪审计架构 五、跟踪审计流程 六、相关部门职责 七、跟踪审计内容 八、全过程造价控制及跟踪审计相关表格 一、全过程跟踪控制审计相关法律、法规依据 1、《中华人民共和国审计法》; 2、《中华人民共和国建筑法》; 3、《中华人民共和国合同法》; 4、《中华人民共和国招标投标法》; 5、建设部107号令《建筑工程施工发包与承包计价管理办法》 6、财政部《基本建设工程预算、结算、决算审核暂行办法》财协(1999)103号 7、财政部《财政性投资基本建设项目工程概、预、决算审查若干规定》(财建[2000]43号); 8、财政部《财政投资评审管理规定》(财建〔2009〕648号); 9、财政部建设部关于印发《建设工程价款结算暂行办法》财建[2004]369号 10、内蒙古自治区财政厅《财政投资项目评审操作规程》(内财建[2003]186号); 11、内蒙古自治区财政厅《内蒙古自治区财政性投资项目评审管理办法》(内财建 [2003]500号); 12、内蒙古自治区财政厅《自治区本级财政专项资金管理暂行办法》(内政字 [2004]155号); 13、内蒙古自治区财政厅《自治区关于加强重点建设项目资金管理的若干规定》(内政发[2001]107号); 14、中国建设工程造价管理协会《工程造价咨询单位执业行为准则》(2002)第015号; 15、中国建设工程造价管理协会《建设工程招标控制价编审规程》(2011)6号 16、中国建设工程造价管理协会《建设项目投资估算编审规程》(2007)003号 目标跟踪算法的分类 主要基于两种思路: a)不依赖于先验知识,直接从图像序列中检测到运动目标,并进行目标识别,最终跟踪感兴趣的运动目标; b)依赖于目标的先验知识,首先为运动目标建模,然后在图像序列中实时找到相匹配的运动目标。 一.运动目标检测 对于不依赖先验知识的目标跟踪来讲,运动检测是实现跟踪的第一步。运动检测即为从序列图像中将变化区域从背景图像中提取出来。运动目标检测的算法依照目标与摄像机之间的关系可以分为静态背景下运动检测和动态背景下运动检测 (一)静态背景 1.背景差 2.帧差 3.GMM 4.光流 背景减算法可以对背景的光照变化、噪声干扰以及周期性运动等进行建模,在各种不同情况下它都可以准确地检测出运动目标。因此对于固定 个关键技术: a)匹配法则,如最大相关、最小误差等 b)搜索方法,如三步搜索法、交叉搜索法等。 c) 块大小的确定,如分级、自适应等。 光流法 光流估计的方法都是基于以下假设:图像灰度分布的变化完全是目标或者场景的运动引起的,也就是说,目标与场景的灰度不随时间变化。这使得光流方法抗噪声能力较差,其应用范围一般局限于目标与场景的灰度保持不变这个假设条件下。另外,大多数的光流计算方法相当复杂,如果没有特别的硬件装置,其处理速度相当慢,达不到实时处理的要求。 二.目标跟踪 运动目标的跟踪,即通过目标的有效表达,在图像序列中寻找与目标模板最相似候选目标区位置的过程。简单说,就是在序列图像中为目标定位。运动目标的有效表达除了对运动目标建模外,目标跟踪中常用到的目标特性表达主要包括视觉特征 (图像边缘、轮廓、形状、纹理、区域)、统计特征 (直方图、各种矩特征)、变换系数特 光线跟踪算法思想 一、概述 本试验完成了基本光线跟踪、高级光线跟踪(反射、折射、透明、阴影)、光线跟踪加速算法等三个与光线跟踪有关的内容。 二、算法简述 1.面片求交 面片求交采用了先求交后判断的方法。现将光线的方程代入平面方程中求出交点。然后将该面片与交点都投影到同一个平面中如XOY平面。投影时需要判断投影结果是否会退化为一条直线,如果发生这种情况则要投影到另一平面内。 投影后,将交点坐标代入到面的边线方程中(要保证线的方向一致),并判断符号,如果符号始终相同,则表示点在面内。 2.球体求交 球体求交也采用了将光线方程代入球体方程的方式。如果方程无解表示没有交点。如果有两个大于0的解,则取较小的一个;如果一个大于0,一个小于0的解,则取大于零的解。 如果没有大于零的解则仍判定为不相交。 3.光线跟踪算法 设定视点和画布 for 画布上的每一行 { for 每一行上的每个像素 { 生成一条从视点到像素点的光线ray LT[i,j] = ray.RayTrace(物体数组,光源数组,1) } } //计算光线与物体的交点,并计算光强 V oid RayTrace(物体数组,光源数组,递归深度) { for 每个物体 { 计算光线与该物体的交点 if 光线起点到交点的距离小于已记录的最短距离且大于0 { 将最短距离设置为该距离 在这条光线对象中记录交点坐标,平面法向量,透明度,物体序号等 } } 对于距光线起点最近的那个点,执行 ComputeIntensity(物体数组,交点数组序号,光源数组,递归深度) } V oid ComputeIntensity(物体数组,交点数组序号,光源数组,递归深度) { 给物体加上环境光强 for (每个光源) { 生成一条从光源指向交点的光线 判断该光线是否与其他不透明的物体相交 if (不相交) 将该光线光强乘以满反射系数和镜面反射系数加到被跟踪光线的光强中 } if (递归深度< 设定深度) { if (需要反射) { 生成一条以交点为起点的反射光线reflectRay reflectRay.RayTrace(物体数组,光源数组,递归深度+1) 将reflectRay的光强与镜面反射系数相乘,加到原被跟踪光线光强中} if (需要折射) { 生成一条以交点为起点的折射光线refractRay refractRay.RayTrace(物体数组,光源数组,递归深度+1) 将refractRay的光强与透明系数相乘,加到原被跟踪光线光强中} } } 4.光线跟踪加速算法(层次包围球) 本作业选择了包围球而不是包围和来实现加速。这是基于光线与包围球求交比与包围盒求交速度快的考虑。虽然包围盒比包围球能更紧密地包围住物体,但与包围盒求交时需要处理所有可见面片并且对求出的交点还要判断是否在面片内,这样,当物体数量较少时反而起不到加速的作用。因此我觉得包围盒更适合于规模很大的光线跟踪计算。 在MFC对话框的控件中显示Opencv摄像头视频+Camshift跟踪算法实现 2010-05-07 16:31 一般用opencv显示视频,都用cvNamedWindow新建窗口,并且在while循环中更新每一帧视频,由于窗口是opencv自己创建的,所以在VC中很难对其进行控制,出于这个目的,希望能将视频显示在VC能够控制的部件中。这里给出一个实例说明如何在MFC对话框的picture控件中显示摄像头视频。 主要步骤为: 1.建立对话框工程并设置对话框布局 注意对话框中间的是picture控件用于显示视频。 2.和console的程序一样,设置opencv库环境,加入opencv头文件,并定义所需要的变量。 3.关键的是这一步,定义CvvImage类型的变量m_CvvImage,这个类型的变量里有函数DrawToHDC能在MFC的控件中显示视频。 还有一个关键的一步是设置定时器timer,MFC中不用while循序来更新每帧视频,取而代之的是在定时器timer的响应函数中实现视频的更新,在本程序中每100毫秒进入一次定时器,定时器响应时间可以更改。 这里给出“打开摄像头”和定时器timer的响应函数。 01void COpencvUIDlgDlg::OnOpencamera() //打开摄像头按钮的响应函数 02{ 03// TODO: Add your control notification handler code here 04m_Video=cvCreateCameraCapture(-1);//打开摄像头 05 06if (!m_Video) 07return; 08 09SetTimer(1,100,NULL);//设置定时器 10} 11 12void COpencvUIDlgDlg::OnTimer(UINT nIDEvent) //定时器的响应函数 13{ 14// TODO: Add your message handler code here and/or call default 15// KillTimer(nIDEvent); 16m_Frame=cvQueryFrame(m_Video);//m_Frame是IplImage指针类型 17m_CvvImage.CopyOf(m_Frame,1);//m_CvvImage是CvvImage类型 18m_CvvImage.DrawToHDC(hDC,&rect); 19//将CvvImage显示在picture控件中,hDC是picture控件的句柄.rect是picture的区域. 20b_flagProcess=1; 21 22CDialog::OnTimer(nIDEvent); 23} 4.加入截图和保存视频功能。 本程序下载地址:https://www.doczj.com/doc/744128628.html,/source/1617588 --------------------------------------------------------------------------------------------------------------------------------- 可以对本程序进行二次开发,下面实现在上述程序的基础上实现Camshift跟踪算法。 Opencv中自带Camshift跟踪算法的实现(OpenCV\samples\c\camshiftdemo.c),不过是基于console的,在MFC中实现则不能用其本来的鼠标回调函数来定位目标,而要改用MFC的鼠标消息响应函数。 运行结果为: 基于Mean Shift的目标跟踪算法研究 指导教师: 摘要:该文把Itti视觉注意力模型融入到Mean Shift跟踪方法,提出了一种基于视觉显著图的Mean Shift跟踪方法。首先利用Itti视觉注意力模型,提取多种特征,得到显著图,在此基础上建立目标模型的直方图,然后运用Mean Shift方法进行跟踪。实验证明,该方法可适用于复杂背景目标的跟踪,跟踪结果稳定。 关键词:显著图目标跟踪Mean Shift Mean Shift Tracking Based on Saliency Map Abstract:In this paper, an improved Mean Shift tracking algorithm based on saliency map is proposed. Firstly, Itti visual attention model is used to extract multiple features, then to generate a saliency map,The histogram of the target based on the saliency map, can have a better description of objectives, and then use Mean Shift algorithm to tracking. Experimental results show that improved Mean Shift algorithm is able to be applied in complex background to tracking target and tracking results are stability. 1 引言 Mean Shift方法采用核概率密度来描述目标的特征,然后利用Mean Shift搜寻目标位置。这种方法具有很高的稳定行,能够适应目标的形状、大小的连续变化,而且计算速度很快,抗干扰能力强,能够保证系统的实时性和稳定性[1]。近年来在目标跟踪领域得到了广泛应用[2-3]。但是,核函数直方图对目标特征的描述比较弱,在目标周围存在与目标颜色分布相似的物体时,跟踪算法容易跟丢目标。目前对目标特征描述的改进只限于选择单一的特征,如文献[4]通过选择跟踪区域中表示目标主要特征的Harris点建立目标模型;文献[5]将初始帧的目标模型和前一帧的模型即两者的直方图分布都考虑进来,建立混合模型;文献[6]提出了以代表图像的梯度方向信息的方向直方图为目标模型;文献[7-8]提出二阶直方图,是对颜色直方图一种改进,是以颜色直方图为基础,颜色直方图只包含了颜色分布信息,二阶直方图在包含颜色信息的前提下包含了像素的均值向量和协方差。文献[9]提出目标中心加权距离,为离目标中心近的点赋予较大的权值,离目标中心远的点赋予较小的权值。文献[4-9]都是关注于目标和目标的某一种特征。但是使用单一特征的目标模型不能适应光线及背景的变化,而且当有遮挡和相似物体靠近时,容易丢失目标;若只是考虑改进目标模型,不考虑减弱背景的干扰,得到的效果毕竟是有限的。 针对上述问题,文本结合Itti 提出的视觉注意模型[5],将自底向上的视觉注意机制引入到Mean Shift跟踪中,提出了基于视觉显著图的Mean Shift跟踪方法。此方法在显著图基础上建立目标模型,由此得到的目标模型是用多种特征来描述的,同时可以降低背景对目标的干扰。 2 基于视觉显著图的Mean Shift跟踪方法 目标跟踪算法的分类主要基于 两种思路: a)不依赖于先验知识,直接从图像序列中检测到运动目标,并进行目标识别,最终跟踪感兴趣的运动目标; b)依赖于目标的先验知识,首先为运动目标建模然后在图像序列中实时找到相匹配的运动目标。 一.运动目标检测 对于不依赖先验知识的目标跟踪来讲,运动检测是实现跟踪的第一步。运动检测即为从序列图像中将变化区域从背景图像中提取出来。运动目标检测的算法依照目标与摄像机之间的关系可以分为静态背景下运动检测和动态背景下运动检测(一)静态背景 2.帧差 3.GMM 4.光流 背景减算法可以对背景的光照变化、噪声干扰以及周期性运动等进行建模,在各种不同情况下它都可以准确地检测出运动目标。因此对于固定摄像头的情形,目前大多数的跟踪算法中都采用背景减算法来进行目标检测。背景减算法的局限性在于它需要一个静态的固定摄像头。 (二)运动场通常情况下,摄像机的运动形式可以分为两种:a)摄像机的支架固定,但摄像机可以偏转、俯仰以及缩放;b)将摄像机装在某个移动的载体上。由于以上两种情况下的背景及前景图像都在做全局运动,要准确检测运动目标的首要任务是进行图像的全局运动估计与补偿。 考虑到图像帧上各点的全局运动矢量虽不尽相同(摄像机做平移运动除外),但它们均是在同一摄像机模型下的运动,因而应遵循相同的运动模型,可以用同一模型参数来表示。 全局运动的估计问题就被归结为全局运动模型参数的估计问题,通常使用块匹配法或光流估计法 来进行运动参数的估计。 块匹配 基于块的运动估算和补偿可算是最通用的算法。可以将图像分割成不同的图像块,假定同一图像小块上的运动矢量是相同的,通过像素域搜索得到最佳的运动矢量估算。块匹配法主要有如下三个关键技术: a)匹配法则,如最大相关、最小误差等 b)搜索方法,如三步搜索法、交叉搜索法等。 c)块大小的确定,如分级、自适应等。 光流法 光流估计的方法都是基于以下假设:图像灰度分布的变化完全是目标或者场景的运动引起的,也就是说,目标与场景的灰度不随时间变化。这使得光流方法抗噪声能力较差,其应用范围一般局限于目标与场景的灰度保持不变这个假设条件下。另外,大多数的光流计算方法相当复杂,如果没有特别的硬件装置,其处理速度相当慢,达不到实时处理的要求。 二.目标跟踪 运动目标的跟踪,即通过目标的有效表达,在图像序列中寻找与目标模板最相似候选目标区位置 光线跟踪算法的研究与进展 刘进 摘要:光线跟踪算法是图形绘制技术中的经典算法,但是该算法光线与物体的求交量庞大,严重制约着应用。本文从经典的光线跟踪算法出发,研究了目前光线跟踪算法的国内外研究状况,具体从改进的光线跟踪算法和光线跟踪算法的加速技术,并进行了对比和分析。最后对近几年的光线跟踪方法发展进行了总结,对未来研究热点及应用前景进行了展望。 关键词:可视化;光线跟踪算法;并行绘制;GPU Research Status and Prospect for ray tracing algorithms Abstract: As an classic algorithms of volume rendering in computer graphics, ray tracing algorithms is hindered by the huge computation cost in ray and volume. This paper summarizes the research status in ray tracing technology from the two main solutions: different extended ray tracing algorithms and the acceleration techniques in ray tracing algorithms. Comparison and analysis the different performance. Both current research focus and the future research prospect are also discussed in recent years. Key words: visualization; ray tracing algorithms; parallel rendering; GPU 引言 随着科学技术和计算机高速发展,人类已经进入到一个科技支撑的时代,在我们的生活中到处充满了高科技产品和技术,给我们的生活带来了改变和方便,其中计算机图形学的应用已经渗透到了各个工程技术领域,其已经成为计算机科学的重要学科之一,具有相当的重要性和无可替代的作用。计算机图形学自诞生以来得到了飞速发展,其通过计算机的输入设备、显示设备及绘制设备等对图形的表示、绘制、存储、显示等相关理论知识、算法技术进行研究的一门学科。真实感图形绘制是计算机图形学的主要研究内容之一,在虚拟现实、文物保护、影视游戏、三维动画、医学研究、建筑设计和系统仿真等领域中得到广泛应用,它追求对场景的逼真渲染[1]。其中逼真的图形绘制技术是最为活跃的研究领域之一。 光线跟踪算法是真实感图形绘制技术的主要算法之一,其原理简单,能够有效生成具有比较真实视观效果的各种各样的场景。该算法可通过一些光照明模型模拟在光源或环境光照射下物体表面发生的多种光照效果,例如漫反射、高光、镜面映像、场景消隐及阴影等。在计算机中对现实场景或是虚拟场景进行显示,除了要构建场景图形外,还要将场景中的各种光照效果模拟出来,这样生成的场景才能更逼真,光线跟踪算法就是既在几何上相似,也能模拟出大部分的光照效果的生成真实感图形的方法。光线跟踪算法是逆着真实光线的投射方向进行反向跟踪的,从视点向场景发射光线,光线与场景中的物体相交,计算光分量,因为视点向场景的光线较多,因而该算法光线与物体的求交量较大,但是因为其对场景的模拟的逼真,及其可以模拟漫反射、镜面反射、反射折射以及阴影等光照效果[1-2]。 进入90年代,随着计算机技术的发展,光线跟踪技术广泛应用于三维特技电影、电视广告、电子游戏的制作中,其应用领域也正在向如物理、化学、生物等其他学科领域渗透,其应用的范围正不断扩大,很多基于光线跟踪算法的新理论也应运而生,物理学中的相对论、地理中地层的绘图等与光线跟踪算法相结合的研究已经实现,极大的推动其学科的发展。可 目录 摘要 (1) ABSTRACT (2) 第一章绪论 (4) 1.1课题研究背景和意义 (4) 1.2国外研究现状 (5) 1.3本文的具体结构安排 (7) 第二章运动目标检测 (8) 2.1检测算法及概述 (8) 2.1.1连续帧间差分法 (9) 2.1.2背景去除法 (11) 2.1.3光流法 (13) 第三章运动目标跟踪方法 (16) 3.1引言 (16) 3.2运动目标跟踪方法 (16) 3.2.1基于特征匹配的跟踪方法 (16) 3.2.2基于区域匹配的跟踪方法 (17) 3.2.3基于模型匹配的跟踪方法 (18) 3.3运动目标搜索算法 (18) 3.3.1绝对平衡搜索法 (18) 3.4绝对平衡搜索法实验结果 (19) 3.4.1归一化互相关搜索法 (21) 3.5归一化互相关搜索法实验结果及分析 (22) 第四章模板更新与轨迹预测 (26) 4.1模板更新简述及策略 (26) 4.2轨迹预测 (28) 4.2.1线性预测 (29) 4.2.2平方预测器 (30) 4.3实验结果及分析: (31) 致 (36) 参考文献 (37) 毕业设计小结 (38) 摘要 图像序列目标跟踪是计算机视觉中的经典问题,它是指在一组图像序列中,根据所需目标模型,实时确定图像中目标所在位置的过程。它最初吸引了军方的关注,逐渐被应用于电视制导炸弹、火控系统等军用备中。序列图像运动目标跟踪是通过对传感器拍摄到的图像序列进行分析,计算出目标在每帧图像上的位置。它是计算机视觉系统的核心,是一项融合了图像处理、模式识别、人工只能和自动控制等领域先进成果的高技术课题,在航天、监控、生物医学和机器人技术等多种领域都有广泛应用。因此,非常有必要研究运动目标的跟踪。 本论文就图像的单目标跟踪问题,本文重点研究了帧间差分法和背景去除法等目标检测方法,研究了模板相关匹配跟踪算法主要是:最小均方误差函数(MES),最小平均绝对差值函数(MAD)和最大匹配像素统计(MPC)的跟踪算法。在跟踪过程中,由于跟踪设备与目标的相对运动, 视野中的目标可能出现大小、形状、姿态等变化, 加上外界环境中的各种干扰, 所要跟踪的目标和目标所在的场景都发生了变化, 有可能丢失跟踪目标。为了保证跟踪的稳定性和正确性, 需要对模板图像进行自适应更新。由于目标运动有一定得规律,可以采取轨迹预测以提高跟踪精度,本文采用了线性预测法。 对比分析了相关匹配算法的跟踪精度和跟踪速度;对比不采用模板更新和模板跟新的跟踪进度和差别,实验表明,跟踪算法加上轨迹预测及模板跟新在很大程度上提高了跟踪帧数,提高了跟踪精度,具有一定的抗噪声性能。 70 第31卷 第12期 湖南科技学院学报 V ol.31 No.12 2010年12月 Journal of Hunan University of Science and Engineering Dec.2010 基于改进Camshift 算法的多目标自适应跟踪 曲巨宝 (武夷学院 数学与计算机系,福建 武夷山 354300) 摘 要:针对多目标跟踪中常因目标间遮挡、融合、分离等导致跟踪失败,提出了用动态背景建模技术和RGB 三通道色差法获取目标群组,然后利用Kalman 滤波器预测运动目标初始参量,再用改进的Camshift 算法逐步迭代逼近各个目标精确位置,实现了对多目标的自适应跟踪。经大量实验证明,本算法目标识别能力强,抗噪声性能好,跟踪速度快。 关键词:Camshift ;多目标跟踪;自适应;kalman 中图分类号:TP393 文献标识码:A 文章编号:1673-2219(2010)12-0070-03 运动目标的检测、跟踪是计算机视觉研究的重要内容,被广泛用于智能视觉监控、视频检索等领域。由于运动视频受光线、目标动态变化影响使目标检测和跟踪变得非常困难,尤其对多个运动目标进行同时跟踪,目标间发生遮挡、融合、分离导致跟踪变得异常艰难。文献 [1]提出了基于MeanShift 的多目标粒子滤波跟踪算法设计,但MeanShift 算法不但对抗遮挡能力比较差,而且不具有搜索窗自适应功能;文献[2] 提出用水平集法对多运动目标进行分割;文献[3] 提出用多个摄像机构建系统来处理多个运动目标相互遮挡的问题,但这种系统造价较高且算法复杂,实时性差;本文在研究了多运动目标的颜色特征、运动规律后,使用背景差分法建立动态背景模型,将当前帧同背景帧做差分获得运动目标,通过Kalman 滤波方法对各目标在下一帧的初始位置进行预测后,再调用Camshift 逐次逼近各个目标的精确位置,经实际应用取得了较好的效果。 1 动态背景模型 利用背景差分法建立动态背景模型,以帧间差分法为基础,通过当前帧帧差分的二值图像找到运动区域,对运动区域内的背景保持不变,而非运动区域的背景则用当前帧进行更新,经过一定次数的迭代便可提取出背景。其步骤如下: (1)将序列图像的第一帧图像I 0作为初始背景图像。 (2)计算当前帧k 的帧间差分二值图像BW k : ???? ?≤?=?otherwise I I BW k k k k 1 ||01τ (1) 其中,I k , I k-1分别为当前帧和上一帧图像,k τ是判断第k 帧是否有变化的阀值(实验中取25) (3)利用二值图像BW k 更新背景B k : ???????+?==?otherwise B I BW if B B k k k k k 1)1(1αα (2) 其中α为更新系数,取0.2 (4)k=k+1返回到步骤(3),进行迭代,经过一定次数的迭代后停止迭代,并将此时的Bk 作为背景图像B0 收稿日期:2010-09-20 资助项目:福建省教育厅科技项目(JA09240)、武夷学院智能计算网格科研团队(2009) 作者简介:曲巨宝(1963-),男,吉林乾安人,副教授,硕士,研究方向为计算机视觉、图形图像、人工智能。光线跟踪讲解及源代码
CamShift算法
1软件项目计划的跟踪过程
Camshift算法原理
项目跟踪流程表
光线投射,光线追踪与路径追踪的概念与区别
TLD目标跟踪算法
建设项目全过程跟踪审计(DOC)
目标跟踪算法的分类
光线跟踪算法思想
在MFC对话框的控件中显示Opencv摄像头视频+Camshift跟踪算法实现
基于meanshift的目标跟踪算法——完整版
目标跟踪算法的分类
光线跟踪算法
目标跟踪算法的研究毕业论文
基于改进Camshift算法的多目标自适应跟踪
相关主题
文本预览