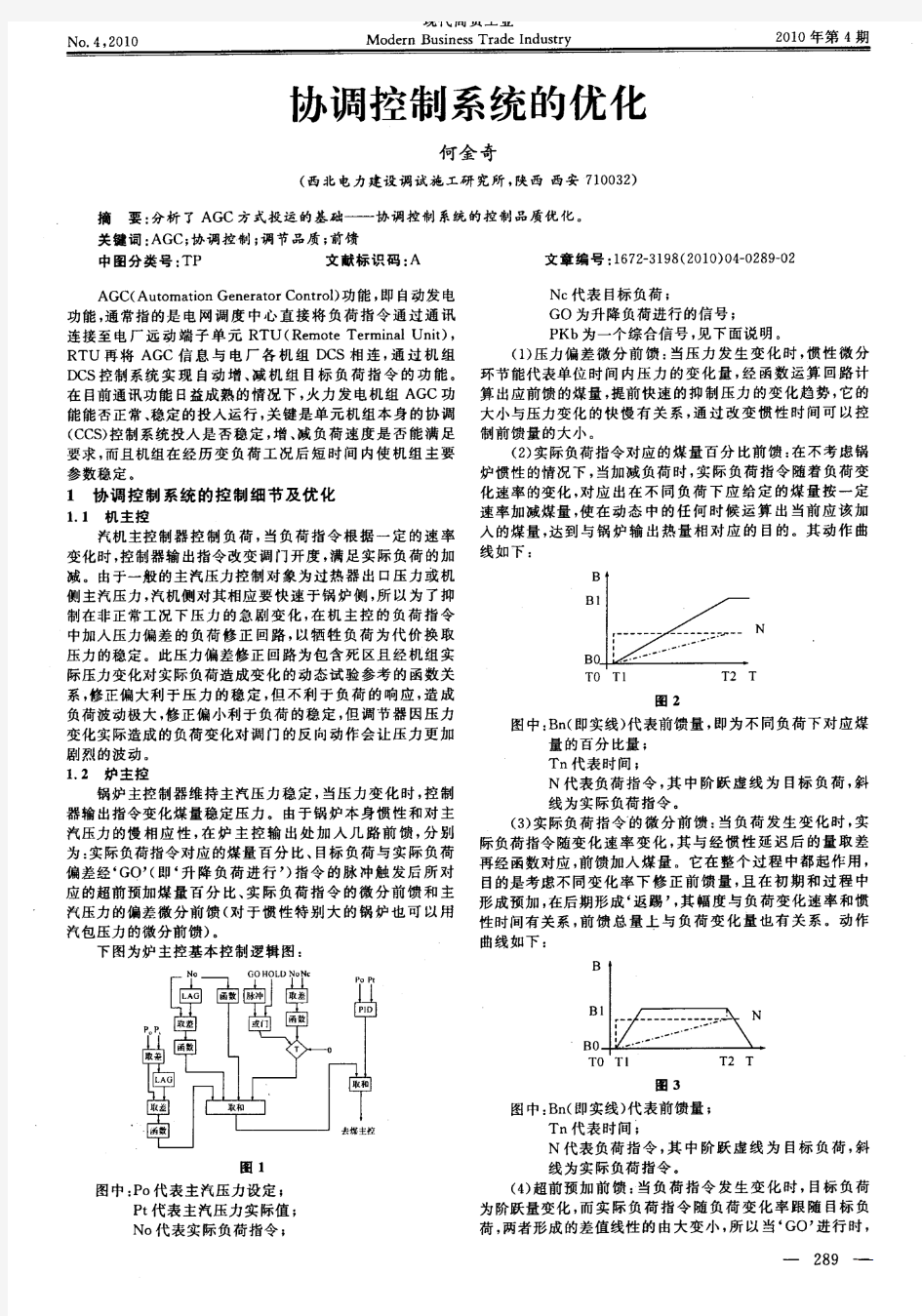
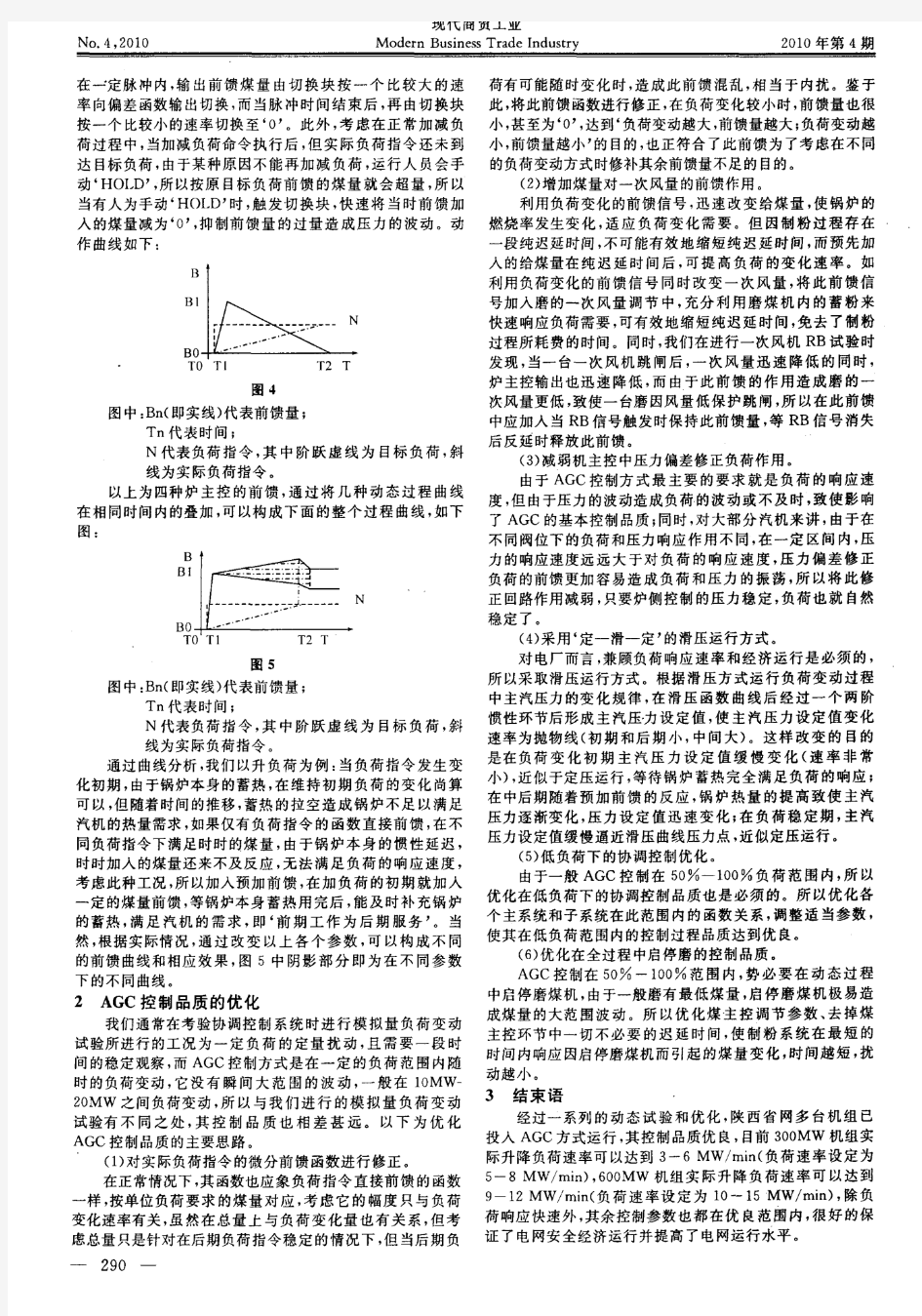
大型火电厂锅炉-汽轮机组协调控制系统的分析 上海发电设备成套设计研究所杨景祺 目前我国火电站领域的技术具有快速的发展,单元机组的容量已从300MW 发展到600MW,外高桥电厂单元机组容量已达到900MW。DCS系统在火电站的成功应用,大大提高了电站控制领域的自动化投入水平。本文主要对大型火电机组的两种主要炉型—汽包炉和直流炉机组的协调控制系统的设计机理进行概要性的说明。 1.协调控制系统的功能和主要含义 协调控制系统是我国在80年代引进的火电站控制理念,主要设计思想是将锅炉和汽机作为一个整体,完成对机组负荷、锅炉主汽压力的控制,达到锅炉风、水、煤的协调动作。对于协调控制系统而言包含三层含义:机组与电网需求的协调、锅炉汽轮机协调以及锅炉风、水、煤子系统的协调。 1.1.机组与电网需求的协调 机组与电网需求的协调主要是机组最快的响应电网负荷的要求,包括了电网AGC控制和电网一次调频控制两个方面。目前华东电网已实现了电网调度对电厂机组的负荷调度和一次调频控制。 1.2.锅炉汽轮机的协调 锅炉汽轮机的协调被认为是机组的协调,主要是协调控制锅炉与汽轮机,提高机组对电网负荷调度的响应性和机组运行的稳定性。从协调控制系统而言,对汽包锅炉和直流锅炉都具有相同的控制概念,但由于两种炉型在汽水循环上有很大的差别,导致控制系统具有很大的差别。 1.3.锅炉协调 锅炉协调主要考虑锅炉风、水、煤之间的协调。 2.汽包锅炉机组的协调控制系统 汽轮机、锅炉协调控制系统概念的引出,主要在于汽轮机和锅炉对于机组的负荷与压力具有完全不同的控制特性,汽轮机以控制调门开度实现对压力、负荷的调节,具有很快的调节特性,而锅炉利用燃料的燃烧产生的热量使给水流量变为蒸汽,其控制燃料的过程取决于磨煤机、给煤机、风机
单元机组协调控制系统设计 摘要 在单元制机组的不断发展,协调控制系统作为单元制机组的控制核心,已然成为电厂自动化系统中最为关键的组成单元。随着机组类型的不同,各个机组的参数也越来越高,容量也在逐渐增进,机组的动态特征和控制难度也随机组型号的不同而改动,因此不同机组的协调控制系统也是不同的。所以在设计协调控制系统时,应该综合考虑所研究机组的动态特征和生产流程,针对不同类型机组的进行相应的方略。在火电厂现场中,单元机组协调控制系统是一个具有强耦合、大时滞、大迟延、非线性等特征的一个多变量系统。所以,这些复杂的动态特征,使得创建单元机组的非线性动态模型成为一个难点,而且使协调控制及其参数整定变得复杂起来,往往使调节品质下降,不能得到令人中意的控制品质。 本文首先阐述了单元机组协调控制系统的结构和功能,并对机组的动态特征和负荷指令管理系统进行了描述。然后以一个300MW机组为研究对象,由分析得出该机组的模型结构,再对辨识出的协调系统的对象进行静态解耦控制,用工程正定法对解耦控制器参数进行整定,并用Matlab软件做了系统仿真。仿真结果表明,解耦后的协调控制系统可以达到令人满意的控制品质和效果。 关键词:协调控制;解耦控制;Matlab仿真;PID整定;300MW机组
Design of Coordinated Control System for Unit Abstract In the continuous development of unit system, coordinated control system as a unit system control core, has become the power plant automation system, the most critical component. With the different types of units, the parameters of each unit are getting higher and higher, the capacity is gradually increasing, the dynamic characteristics of the unit and the difficulty of control are also different types of change, so different units of the coordinated control system is different. Therefore, in the design of coordinated control system, should consider the selected units of the dynamic characteristics and process, for different types of units for the corresponding design. In the field of thermal power plant, the unit control system is a multivariable system with strong coupling, time variability, large delay and non-linearity. Therefore, these complex dynamic characteristics make the nonlinear dynamic model of the unit unit become a difficult point, and make the coordination control and its parameter setting become complicated, and the adjustment quality is often reduced, and the satisfactory control effect can not be obtained. In this paper, the structure and function of the unit control system are described, and the dynamic characteristics and load command management system of the unit are described. Then, a 300MW unit is taken as the object of study, and the model structure of the unit is obtained. The decoupling control of the identified coordinate system is carried out. The parameters of the decoupling controller are set by engineering positive definite method. Software to do the system simulation. The simulation results show that the coordinated control system can achieve satisfactory control quality and effect. Keywords:Coordination control system;Decoupling control;Matlab simulation;PID tuning ;300MW unit
交通信号控制优化服务解决方案 1概述 交通信号控制优化服务是借助专业团队对交通信号控制方面进行挖掘,以更加有效地缓解目前由于机动车数量过快增长而造成路网交通运行压力增大,道路硬件资源增长严重失衡这一问题。具体服务内容包括: ?对交通信号控制理论及相关技术进行总结,规范信号优化工作流程,落实责任,建立统一化与个性化相结合的交通信号管理模式,保证交通信号合理运行,满足各种条件下道路交通参与者的通行需要。 ?通过对相关路口进行周期性调查,及时发现存在不足并予以改善、跟踪,从而不断提高其运行水平。 ?通过路口排查和调研,对有条件进行协调控制的路口设计协调控制方案,降低协调控制路口的行车延误,提高交叉口服务能力。 ?以周报、月报和专项分析报告总结归纳工作开展情况及完成效果,有计划性的回检评价历史优化路口,提炼可取之处及考虑不周的地方,对未来将有可能发生变化的交叉口或路段有一定预测性。 2服务内容 2.1交通信号管理基础工作 (1)交通信号控制理论及相关技术总结 交通信号控制理论及相关技术的总结包括对交通信号控制相关理论的总结和对现今主流信号控制模式及方法的总结2部分内容。 ?对交通信号控制相关理论的总结 包括对信号控制涉及的相关参数的总结、对通过能力的总结及对信号路口对车流停滞作用的总结3部分内容。 ?对现今主流信号控制模式及方法的总结 包括对单点信号控制模式与方法的总结、对交通信号子区划分的模式与方法的总结、对主干道交通信号协调控制模式与方法的总结、对同类型交通信号路口协调控制模式与方法的总结、对长距离交通信号协调控制模式与方法的总结以及
对区域协调控制模式与方法的总结六大类涵盖点、线、面三个层次的信号控制与协调方法的相关技术理论的总结。 在对交通信号控制相关理论的总结基础上,根据各地市信号路口特点,重点对适用该地信号控制特点的信号控制模式及方法进行总结。 ?单点信号控制 主要包括单点定时信号控制、单点感应信号控制和单点自适应信号控制三种方式。针对信号控制路口常用的单点信号控制方法有Webster等方法。 ?交通信号子区划分 主要基于距离原则、车流特征原则、周期原则的子区划分原则及其相关的关联度判断方法、合理周期范围判断方法的划分方法总结。 ?主干道交通信号协调控制 主要包括单向绿波协调控制、对称双向绿波协调控制、非对称双向绿波协调控制的方法。针对不同地市信号控制路口不同的流量特征可选用相对应的主干道信号协调控制方法。 ?同类型交通信号路口协调控制 主要针对信号路口饱和度同类型及其基础上的潮汐特征同类型进行交通信号路口同类型的判定分析,归纳与其相对应的信号控制适用方法。 ?长距离交通信号协调 主要对相邻路口间距离较长的信号路口及交通信号路口数较多的整体距离较长的协调控制方法进行研究,针对长距离交通信号协调的分类归纳相对应的协调模式及方法。 ?区域协调控制 交通区域协调控制是二维上的控制,它通过将绿波协调控制的路口利用组合叠加的方式,对各信号控制路口的信号周期、绿信比以及路口间的相位差进行优化,以减小延误、提高路网通行效率的信号控制方法。当前交通信号区域协调控制的方法主要可以分为结合调控的协调方法、基于延误的协调方法和基于绿波带优化的协调方法。 通过全面深入的了解信号控制的基础理论及信号控制主流模式及技术方法,掌握前沿技术,归纳出适用性强的主流核心技术规范,为交通信号控制优化提供
目录 一绪论...................................................................................................................................... 二燃烧控制系统的设计 2.1燃烧过程控制任务 2.2燃烧过程调节量 2.3燃烧过程控制特点 三燃料控制系统 ........................................................................................................................ 3.1燃料调节系统...................................................................................................................... 3.2燃料调节——测量系统...................................................................................................... 3.3给煤机指令.......................................................................................................................... 四600MW火电机组DCS系统设计 4.1 电源部分 4.2 通信部分 4.3 系统接地 4.4 软件部分 五结论................................................................................................................................... 参考文献...................................................................................................................................
第6章 连续系统的最优控制 6.1 最优化问题 6.2 最优控制的变分法求解 6.3 线性系统二次型性能指标的最优控制 1、线性系统有限时间最优状态调节系统 ◆二次型性能指标 设受控系统对平衡点的增量方程为 ()()()()()x t A t x t B t u t ?=?+?,00()x t x ?=? 简记为 ()()()()()x t A t x t B t u t =+,00()x t x = 最优状态调节是指:对上述系统,在时间区间0[,]f t t t ∈,
寻求最优状态反馈控制,使初始状态偏差00()x t x =迅速衰减,且同时使二次型性能泛函 11()()[()()()()]d 22f t t t t f f f x u t J x t Q x t x t Q x t u t Q u t t =++? * min f x u J J J J J =++→= 式中 ()0f n n Q ?≥——终端加权矩阵。 ()0x n n Q ?≥——状态加权矩阵。 ()0u r r Q ?>——控制加权矩阵。 三个加权矩阵均为对称矩阵,为简单,一般取为对角矩 阵。 ●1()()2 t f f f f J x t Q x t =表示对终端状态偏差即稳态控制精度的限制。当1 diag[]f f fn Q q q =,2 1 1()2n f fi i f i J q x t ==∑
●0 1()()d 2f t t x x t J x t Q x t t =?表示对控制过程中状态偏差衰减速度的要求。当1 diag[]x x xn Q q q =,0 2 11()d 2f t n x xi i i t J q x t t ==∑? ●0 1()()d 2f t t u u t J u t Q u t t =?表示对控制过程中所消耗的能量的限制,以避免状态偏差过快衰减导致控制量超过允许数值。当 1 diag[]u u ur Q q q =,0 2 11()d 2f t r u ui i i t J q u t t ==∑?,2()i u t 可理解为功率。 实际上,在性能指标中,x J 已经对控制的稳态精度有所要求。当对稳态精度有更高的要求时,才增加f J 项。 由上可知,上述二次型性能指标的物理意义是,在整个时间区间0[,]f t t t ∈,特别是终值时刻f t t =上状态变量尽量接近于0
600MW机组协调控制系统优化 1 机组概况 河北国华沧东发电有限责任公司一期工程为两台600MW亚临界燃煤发电机组。汽机岛由上海汽轮机厂供货,锅炉岛由上海锅炉厂供货。 2 协调控制系统控制原理 协调控制的设计方案是以锅炉跟随为基础的协调控制系统,原设计机组采用定-滑-定运行方式,从0到27%为定压方式运行,27%到77%负荷区间为滑压运行方式,77%以上为定压运行方式。 锅炉主控输出指令由以下几个部分组成:1)机组负荷指令给定值信号;2)机组负荷指令给定值的微分信号;3)机组负荷指令目标值的微分信号;4)机组滑压设定值的微分信号;5)频差信号;6)压力设定值与实际值偏差的微分信号;7)锅炉主汽压力PID调节器输出信号。 其中,机组负荷指令给定值信号为锅炉主控制器的主前馈信号,其他微分前馈用于在机组负荷升降过程中提高锅炉主控制器的响应速度,压力设定值与实际值偏差的微分信号用于在主汽压力与设定值偏差过大时快速动作锅炉主控制器帮助调节主汽压力。 在机组负荷指令变化的初期汽机侧调门是基本不变的,因为送到汽机控制器的机组负荷指令要经过一个四阶滞后,延时时间t为锅炉产生蒸汽时间的0.2倍。经过四阶惯性环节延迟后的负荷指令还要加上压力拉回回路计算的结果,再与实际负荷值进行偏差运行,偏差值经PID回路计算后做为汽机主控的输出送往DEH控制系统控制阀门开度。汽机主控输出指令由以下几个部分组成:1)机组负荷指令给定值经过四阶惯性延迟;2)锅
炉主控送来的机组负荷指令给定值的一阶微分信号;3)频差信号;4)主汽压力偏差信号即压力拉回回路;5)实际负荷值。 以上信号1-4相加后同实际负荷求偏差送入汽机主控PID调节器,PID 调节器的输出来控制汽轮机调速汽门的开度。压力拉回回路就是计算设定压力与实际压力的偏差,当偏差值超过规定值后(原设计为±1.8%),就将这个偏差值经过处理放大后叠加到负荷命令回路中。举例来说,当升负荷时,根据滑压曲线首先要增大压力设定值,如果在升负荷过程中,实际压力比设定压力低出太多,超过规定值,就会产生一个负数加到负荷命令上,从而减小负荷命令,减小调门开度,以便于增大实际压力,当实际压力与设定压力偏差小于规定值时,该值输出为0。降负荷时也起到同样道理,因为该回路具有将压力拉回作用,因此称之为压力拉回回路。一次调频功能就是当电网频率低于或高于某个限值时,不通过协调控制回路产生命令,直接将信号作用到汽机控制器负荷调节回路,使机组负荷迅速变化以响应电网需要。 3 存在问题 #1、#2机组协调控制系统在2007年机组投入商业运营后基本能满足现场生产的需要,但是在负荷升降和遇到机组吹灰或燃料等扰动的情况下,主汽压力、温度的摆动幅度过大,导致汽包水位剧烈波动。同时快速负荷变化能力差,负荷命令变化后机组实际负荷响应慢,达不到调度中心对投运AGC机组的要求。 AGC投入合格标准:1)AGC机组负荷调节速率(MW/分钟)不小于机组额定出力的1.5%;2)机组投入AGC控制时,出力调整迟延时间应小于
本科生毕业设计(论文)开题报告 论文题目:嵌入式智能家居控制系统 软件设计 学院:电气工程学院 专业班级:自动化1204 学生姓名:刘芳春 学号: 120302433 导师姓名:王通 开题时间:2016年 3 月 18 日
1.课题背景及意义 1.1课题研究背景、目的及意义 目前,几乎所有家庭都有使用各种电器设备,电视、电灯、空调、冰箱等。然而,就当前情况来说,这些设备总是被看成单个的、独立的个体使用,而极少出现一个专门的系统来管理它们、或是将它们糅合为一个具有一定“智慧”的设备集合体。这不仅使得设备使用者不得不在控制和管理这些设备上消耗大量时间和精力,而且容易造成设备使用效率不高,浪费宝贵的能源,这不符合节能环保的国家政策方针。 基于这个事实,智能家居的概念应运而生。智能家居又被人们称智能住宅[1],在国外也叫做Smart Home。智能家居是以个人住所为单位,以控制技术、通信技术计算机技术为基础,以提升人们的日常家居生活为目的的家居控制和管理系统[2]。 由于智能家居是一个最近才得到快速发展的行业,当前有许多地方并未得到充分的研究,也有许多研究成果并未能转化成为实际产品。探寻其本质因素有两个。其一,大多数已有的智能家居产品是针对高消费人群设计和开发的,而没有顾及到占人口绝大多数的低端消费人群。因此,其市场本身就不会太大。其二,许多开发出来的产品在性能上并不完全让消费者满意。当前已有的产品中的大多数,或是存在功能单调、或是存在使用不方便等各种缺乏吸引力的不足之处。 为了改善这一现状,软件部分设计就成了必不可少的工作,软件部分以软件开发平台为核心,向上提供应用编程接口,向下屏蔽具体硬件特性的板级支持包。嵌入式系统中,软件和硬件紧密配合,协调工作,共同完成系统预定的功能。嵌入式软件是应用程序和操作系统两种软件的一体化程序。对于嵌入式软件而言,系统软件和应用软件的界限并不明显,原因在于嵌入式环境下应用系统的配置差别较大,所需操作系统裁剪配置不同,I/O 操作没有标准化,驱动程序通常需要自行设计[3,4]。 嵌入式实时操作系统在目前的嵌入式系统中应用越来越广泛,尤其在功能复杂、系统庞大的应用中[5]。它与实时应用软件相结合成为有机的整体起着核心作用,由它来管理和协调各项工作,为应用软件提供良好的运行软件环境和开发环境。μC/OS-II 是一个完整的,可移植、固化、裁剪的占先式实时多任务内核。它通过了美国联邦航空管理局商用航行器的认可,符合航空无线电技术委员会对用于航空设备方面所使用的软件性能提出的DO-178B标准认可。目前已有数百个商业应用的μC/OS,该操作系统的稳定性和可靠性得到了充分的肯定[6,7]。该操作系统在智能家居领域中的应用也越来越广泛。因此对于嵌入式智能家居操作系统的研究也越来越有必要。
ITEM NO.: BALCO-COMM-IP008 Complied by: 编写: Checked by: 初审: Revised by: 审核: Approved by: 批准:
目录 Contents 1.编制目的 Compile Purpose 2.调试范围 Scope of commissioning 3.调试前必须具备的条件 Conditions of commissioning 4.调试步骤 Process of commissioning 5.注意事项 Precautions
1.编制目的Compile Purpose 为了指导和规范系统及设备的调试工作,检验系统的性能,发现并消除可 能存在的缺陷,检查热工联锁、保护和信号装置,确保其动作可靠。使系统及设 备能够安全正常投入运行,制定本方案。 This commissioning procedure is compiled to guide and standardize the practice of testing and adjusting to facilitate proofing of system performance, finding and repairing of possible defects, thus ensuring that the equipment and system can be brought into operation safely and smoothly. 2.调试范围Scope of commissioning 2.1协调控制系统是大型火力发电机组的主要控制系统,它将锅炉和汽轮发电机 作为一个整体考虑来进行控制,协调锅炉控制系统与汽轮机控制系统的工作,以 消除锅炉和汽轮机在动态特性方面的差异,使机组既能够适应电网负荷变化的需 要,又能够保证机组的安全稳定经济运行。机炉协调控制系统直接作用的控制对 象是锅炉主控制系统和汽轮机主控制系统,然后再由这两个主控系统分别控制各 自的子控制系统如锅炉燃烧控制子系统、锅炉给水控制子系统和汽轮机电液调节 子控制系统等。 As a major control system of large thermal power generating unit, coordinated control system (CCS) treats the boiler and turbine-generator as a whole, harmonizes the effect of boiler and turbine control systems, and compensates the difference in boiler and turbine-generator dynamic characteristics, thereby meeting changing demand of the Grid and also ensuring safe and economic operation of the unit. The CCS exerts influence directly upon the main control system of boiler and that of turbine, then these two systems exert influence respectively on their own subsystems such as boiler combustion control, boiler feed water, turbine digital electro-hydraulic control (DEH). 2.2 印度BALCO扩建4 x300 MW燃煤电站工程协调系统有如下几种控制方式:BALCO EXPANSION PROJECT 4×300 MW THERMAL POWER PLANT CCS has following control modes: 手动方式 Manual mode 机跟随控制方式(TF) Turbine follow control mode 炉跟随控制方式(BF) Boiler follow control mode 机炉协调控制方式 Coordinated boiler-turbine control mode
1引言 单元机组协调控制的任务是快速跟踪电网负荷的需要和保持主要运行参数的稳定。当电网负荷变动时,从汽轮机侧看,只要改变汽机调速汽门的开度,就能迅速改变进汽量,从而能立即适应负荷的需要。但锅炉即使马上调整燃料量和给水量,由于锅炉固有的惯性及迟延,不可能立即使提供给汽轮机的蒸汽量发生变化。如果汽轮机调汽门开度已改变,流入汽机的蒸汽量相应发生变化,那么此时只能利用主汽压力的改变来弥补或储蓄这个蒸汽量供需差额,此时,主汽压力将产生较大的波动。因此,提高机组负荷适应能力与保持主要参数稳定存在一定的矛盾。协调控制系统设计时将锅炉、汽轮机和发电机作为一个整体来考虑,使锅炉、汽机同时响应负荷要求,协调锅炉及其辅机与汽机的运行,以迅速、准确、稳定地响应负荷要求。 协调控制系统保证机组出力适应电网的负荷变化要求、维持机组稳定运行。具体地说就是对外保证单元机组有较快的功率响应和有一定的调频能力,对内保证主蒸汽压力偏差在允许范围内。协调控制系统是协调地控制锅炉燃料量、送风量、给水量等,以及汽机调节阀门开度,使机组既能适应电网负荷指令的要求,又能保持单元机组在额定参数下安全、经济地运行。单元机组协调控制系统可认为是一种二级递阶控制系统。处于上位级的机炉协调级,也叫作单元机组主控系统,是整个系统的核心部分。处于局部控制级的子系统包括锅炉以及汽机子控制系统。
2 协调控制系统任务与作用 2.1 协调控制系统 协调控制系统作用:保证机组出力适应电网的负荷变化要求、维持机组稳定运行。具体地说就是对外保证单元机组有较快的功率响应和有一定的调频能力,对内保证主蒸汽压力偏差在允许范围内。 协调控制系统任务:是协调地控制锅炉燃料量、送风量、给水量等,以及汽机调节阀门开度,使机组既能适应电网负荷指令的要求,又能保持单元机组在额定参数下安全、经济地运行 在单元机组中,锅炉和汽轮机是两个相对独立的设备,从机组负荷控制角度来看,单元机组是一个存在相互关联的多变量控制对象,经适当假设可以看作是一个具有的两个输入和两个输出的互相关联的被控对象,其方框图如图2.1所示。 图2.1 单元机组负荷控制对象原理方框图 μT- 通汽阀开度μB- 燃烧率水平NE-实发功率PT-主蒸汽压力 单元机组协调控制系统可认为是一种二级递阶控制系统。处于上位级的机炉协调级,也叫作单元机组主控系统,是整个系统的核心部分。处于局部控制级的子系统包括锅炉以及汽机子控制系统。子控制系统作用于负荷被控对象,如图2.2所示。 图2.2 单元机组协调控制系统简图
基于synchro的干线协调控制及优化 1概述 1.1研究背景 不同等级城市道路组成的交叉口在功能、类型和信号控制等方面都有不同的设置。本报告中研究的内容为南北方向未央路与东西方向凤城二路、凤城三路、凤城四路凤城五路的协调控制,其中,未央路为干线。 1?2研究过程 研究过程主要分为以下部分: (1)对未央路-凤城二路交叉口及未央路-凤城五路交通流量调查; (2)根据调查的流量对未央路-凤城三路交叉口及未央路-凤城四路交叉口交通流量配平; (3)用Synchro对配平数据进行检验; (4)用Synchro对干线协调控制进行优化; (5)比较干线协调控制定时信号控制和感应信号控制两个方案; (6)得出结论,给出意见。 2现状调查与分析 2.1现状调查 2.1.1交通量调查 对干线中未央路-凤城五路交叉口、未央路-凤城二路交叉口的车道数、车道宽度、交通流量进行调查。具体见表2-1、表2-2和图2-1。 未央路凤城二路 进口机动车(pcu) 左直右总量 南进口22416082002112 北进口12412921S41600 西进口2161006409前 东进口200216168504 表2-1交叉口断面基础数据调查
未央路--- 凤城五路 进口机动车(pen) 左直右总量 南进口174103822S1440 北进口14414403901974 西进口216100640956 东进口2045526641420 表2-2交叉口断面基础数据调查 图2-1交叉口分布 2.1.2断面形式调查 未央路为双向八车道,设有左转车道,凤城二路为双向八车道,设左转车道,凤城三路、凤城四路、凤城五路均为双向四车道,不设置专左或者专右车道。 3synchro 应用 3. “synchro 简介 Sy nchro软件是一套完整的城市路网信号配时分析与优化的仿真软件;与“道路通行能力手册(HCM2000) ”完全兼容,可与“道路通行能力分析软件(HCS)” 及“车流仿真软件(SimTraffic)”相互衔接来整合使用,并且具备与传统交通仿真软件CORSIM,TRANSYT-7F等的接口,它生成的优化信号配时方案可以直接输入到Vissim软件中进行微观仿真。Synchro软件既具有直观的图形显示,又具有较强的计算
单元机组的特点和任务 (1)单元制机组是一个相互关联的多变量控制对象,锅炉和汽轮发电机是一个不可分割的整体 (2)锅炉和汽轮发电机的动态特性存在较大的差异. (3)具有参加电网一次调频的能力. 协调控制系统作用 保证机组出力适应电网的负荷变化要求、维持机组稳定运行.具体地说就是对外保证单元机组有较快的功率响应和有一定的调频能力,对内保证主蒸汽压力偏差在允许范围内. 协调控制系统任务 是协调地控制锅炉燃料量、送风量、给水量等,以及汽机调节阀门开度,使机组既能适应电网负荷指令的要求,又能保持单元机组在额定参数下安全、经济地运行. 定压运行方式 是指无论机组负荷怎样变动,始终维持主蒸汽压力以及主蒸汽温度为额定值,通过改变汽轮机调节气门的开度,改变机组的输出功率。 滑压运行方式 则是始终保持汽轮机调节气门全开,在维持主蒸汽温度恒定的同时,通过改变主蒸汽压力改变机组的输出功率。 联合运行方式特性曲线 1 调峰:用电量多时多发电,用电量少时少发电。 a采用纯液压控制系统时(有自平衡能力)b采用功频电液控制系统时(无自平衡能力) μT不变μB不变PT机主控指令不变PB炉主控制指令不变 输入量-μT汽轮机调节阀开度(外扰)、μB锅炉燃料量调节机构开度,锅炉燃烧率(内扰)输出量-PE单元机组的输出电功率、PT汽轮机前主蒸汽压力
协调控制系统由哪几部分组成:主控系统、子系统、负荷被控对象 单元机组负荷控制系统 1.负荷指令处理回路(LDC)的作用 对外部要求的负荷指令或目标负荷指令(电网调度分配指令ADS、运行人员手动指令,一次调频所要贡献的负荷指令)进行选择,并根据机组主辅机运行的情况加以处理,使之转变为机、炉设备负荷能力,安全运行所能接受的实际负荷指令P0。 2.机炉主控制器的作用 根据锅炉和汽轮机的运行条件和要求,选择合适的负荷控制方式,按照实际负荷指令P0与实发功率信号PE的偏差和主汽压力的偏差△p以及其它信号进行控制运算,分别产生锅炉主控制指令PB和汽轮机主控指令PT 。 外部指令:ADS ADC 内部指令:RB RD RU 大题 1.机组的负荷指令如何选择? A:电网中心调度所的负荷分配指令ADS、B:运行人员手动设定负荷指令、 C:电网频率自动调整指令。 2.机组的最大最小负荷限制如何实现? ∑2:LDC达最大∑3:LDC达最小 机组的最大负荷根据机组的实际情况来定,最小负荷通常为锅炉稳定燃烧的最小值 3.速度限制器的作用: 限制负荷变化速率 4.负荷返回(RB)负荷迫升(RU)负荷迫降(RD)负荷增闭锁(BI)负荷减闭锁(BD) 5.叙述一下负荷形成原因 (1)ADS方式下,切换开关T4动作,输出为A 当A>LDC OUT时,“LDC增”为ON,T6动作,接通K,输出K×C,机组实际负荷指令LDC OUT增长,直到A=LDC OUT为止。 当A 合肥学院HEFEI UNIVERSITY 集散控制系统的工程设计 班级: 10 姓名: 学号: 10 指导教师: 完成时间: 集散控制系统的工程设计 现代科学技术领域中,计算机技术和自动化技术被认为是发展较快的两个分支,工业自动化根据生产过程的特点可分为过程控制和制造工业自动化及自动化测量系统。过程控制自动化是以流程工业为对象,流程工业自动化控制一般采用集散控制系统(DCS)。 一、DCS控制系统介绍 集散控制系统(Distributed control system)是以微处理器为基础的对生产过程进行集中监视、操作、管理和分散控制的集中分散控制系统,简称DCS系统。该系统将若干台微机分散应用于过程控制,全部信息通过通信网络由上位管理计算机监控,实现最优化控制,整个装置继承了常规仪表分散控制和计算机集中控制的优点,克服了常规仪表功能单一,人机联系差以及单台微型计算机控制系统危险性高度集中的缺点,既实现了在管理、操作和显示三方面集中,又实现了在功能、负荷和危险性三方面的分散。DCS系统在现代化生产过程控制中起着重要的作用。 DCS的工程设计主要有12项内容,按先后顺序排列如下:方案论证,DCS 评估,DCS询价,技术谈判,合同签订,开工会议,系统设计,组态编程,安装调试,现场投运,整理文件,工程验收。 1.1集散控制系统的组成 1、现场控制级 又称数据采集装置,主要是将过程非控变量进行数据采集和预处理,而且对实时数据进一步加工处理,供CRT操作站显示和打印,从而实现开环监视,并将采集到的数据传输到监控计算机。输出装置在有上位机的情况下,能以开关量或者模拟量信号的方式,向终端元件输出计算机控制命令。 在DCS系统中,这一级别的功能就是服从上位机发来的命令,同时向上位机反馈执行的情况。至于它与上位机交流,就是通过模拟信号或者现场总线的数字信号。由于模拟信号在传递的过程或多或少存在一些失真或者受到干扰,所以目前流行的是通过现场总线来进行DCS信号的传递。 气动控制系统设计 2007-08-23 11:43 气动控制系统设计 1、气动控制系统的组成。 在气动控制系统中,气动发生装置一般为空气压缩机,它将原动机供给的机械能转换为气体的压力能;气动执行元件则将压力能转化为机械能,完成规定动作;在这两部分之间,根据机械或设备工作循环运动的需求、按一定顺序将各种控制元件(压力控制阀、流量控制阀、方向控制阀和逻辑元件)、传感元件和气动辅件连接起来。 设计程序有关事项 2.1设计程序 2.1.1调研主机工作要求,明确设计依据。 A.了解主机结构、循环动作过程、执行元件操作力、运动速度及调整范围、运动平稳性、定位精度、传感器元件安装位置、信号转换、联锁要求、紧急停车、操作距离和自动化程度等。 B.工作环境,如温度及变化范围、湿度、振动、冲击、灰尘、腐蚀、防爆要求等。 C.是否要和电气、液压系统相配合,如需要须了解相应的安装位置等。 D.其他要求,如气控装置的重量、外形尺寸、价格要求等要求。 2.1.2气动回路设计 A.由执行元件数目、工作要求和循环动作过程,拟出执行元件的工作程序图。根据工作速度要求确定每一个气缸在一分钟内的动作次数。 B.根据元件的工作程序,参考各种气动基本回路,按程序控制回路设计方法,设计气动回路。 为了得到最合理的气动回路,设计时可做几种法案比较,如气控制,气-----电控制,射流控制方案等进行选择,绘出气动回路图,使用电磁阀的场合,同时还绘出电气回路图。 2.1.3执行元件选择和计算 气动执行元件的类型一般应与主机相协调,即直线往复运动应选择气缸,回转运动应选择气动马达,往复摆动应选择摆动缸。 2.1.4控制元件选择 根据系统或执行元件的工作压力和通过阀的最大流量,选用各生产厂制造的阀和气动元件。选择各种控制阀或逻辑元件时应考虑的特性有: 1工作压力 2额定流量 3响应速度 4使用温度范围 5最低工作压力和最低控制压力 6使用寿命 7空气泄漏量 8尺寸及联接形式 9电气特性等 选择控制阀时除了根据最大流量外,还应考虑最小稳定流量,以保证气缸稳定工作。 *****热电厂#2机组协调优化试验方案 1.概述 1.1 项目名称:**********热电厂#2机组协调优化试验。 1.2 项目简介:*******#2汽轮机采用上海电气集团股份有限公司生产的CZK300-16.67/0.4/538/538双缸双排气直接空冷汽轮机,******热电厂锅炉为单汽包、自然循环、循环流化床燃烧方式,DCS分散控制系统(含DEH)采用杭州和利时MACSV系统。本项目对#2机组进行负荷升降扰动试验,并依次作为试验依据对协调控制系统提出优化策略,并利用试验数据对DCS组态参数进行优化和整定,保证机组调节性能满足电网AGC考核要求。 1.3 项目地点:*****热电厂 1.4 项目工期:2016年月日-2016年月日 2.依据及标准 1)DL/T 656—2006,火力发电厂汽轮机控制系统验收测试规程; 2)DL/T 711-1999,汽轮机调节控制系统试验导则; 3)DL/T 824-2002,汽轮机电液调节系统性能验收导则; 4)DL/T 774-2004,火力发电厂热工自动化系统检修运行维护规程; 5)西北区域发电厂并网运行管理实施细则(试行); 6)西北区域并网发电厂辅助服务管理实施细则(试行); 7)国家电力公司《防止电力生产重大事故的二十五项重点要求》。 3.试验内容 为了保证协调控制系统调试工作顺利进行,需对#2机组进行升降负荷扰动试验。为了保证试验和调试的顺利进行,在此过程中需尽量保持煤质参数的稳定。 试验内容主要包括:大范围快速升降负荷试验;典型工况点负荷锯齿波试验;典型工作点阀门扰动试验。 1)大范围快速升降负荷试验 在大范围升降负荷试验中,对机组进行从150MW至250MW之间的负荷段进行分段试验,由运行人员进行手动调节,保证机组的升降负荷速率不低于1%Pe/min,最高达到1.5%Pe/min;在升降负荷过程中,给煤量和汽轮机阀门开度由运行人员手动调节,给煤量调节部分由清能院进行指导操作。在此试验过程 中北大学 毕业设计开题报告 学生姓名:王小龙学号:07050541X14学院、系:信息与通信工程学院 专业:自动化 设计题目:基于MATLAB的控制系统设计软件开发 指导教师:林都 2011年4月2日 毕业设计开题报告 类专业技术基础课程,在教学与研究过程中,常需要对控制系统用MATLAB进行仿究, MATLAB虽功能强大,对这方面的分析都有相应命令,但命令繁多,分析起来过于零散的性质有个整体的掌握,况且像MATLAB这么大的软件学起来也较困难。为能够更快更好掌握控制系统的性质,把多而散的命令整合起来,开发了控制系统CAI应用软件。使用此软件时用户只需输入系统参数,然后点击相关按钮,就可以快速得到所求相应的结果。二.相关理论知识 控制工程基础是以讲述古典控制为主的机械类专业技术基础课程,在教学与研究过程中,常需要对控制系统用MATLAB进行仿真分析与研究,MATLAB虽功能强大,对这 方面的分析都有相应命令,但命令繁多,分析起来过于零散,难于对系统的性质有个整体的掌握,况且像MATLAB这么大的软件学起来也较困难.为能够更快更好掌握控制系统的性质,把多而散的命令整合起来,开发了控制系统CAI应用软件.使用此软件时用户只需输入系统参数,然后点击相关按钮,就可以快速得到所求相应的结果。 要将控制系统CAI应用软件结构图中的内容在用户界面里表现出来,就必须有参数输入、结果输出、图形仿真输出等,且这些都能进行对比分析,因此要求有个友好、操作简单、可读性强、易修改的图形用户界面,选择MATLAB中具有可视化编程能力的图形界面GUI,将它提供的工具与编程经验结合起来,完成软件界面的创建.。 图1控制系统CAI应用软件结构图 智能交通协调控制系统设计研究 发表时间:2019-06-03T10:24:09.490Z 来源:《防护工程》2019年第4期作者:顾昊沈玉杰 [导读] 缺乏信息的协同处理,且面对突发情况处理能力较弱。本文针对智能交通协调控制系统设计研究,对未来智能一体化交通控制有着一定的意义。 浙江浙大中控信息技术有限公司浙江杭州 310052 摘要:随着经济的不断发展,城市私家车日益增多,交通堵车,尤其是高峰时段的堵车已经成为社会关注的重要问题。现在衡量一个城市发展水平的重要指标就是城市的交通,能否使交通快速、安全、有序地运行是交通的头等问题。本文基于智能交通协调控制系统设计研究展开论述。 关键词:智能交通;协调控制;系统;设计 中图分类号:TP391 文献标识码:A 引言: 伴随着现代城市道路建设的发展和人均汽车拥有量的激增,道路拥堵现象越来越成为急需面对的问题。传统的交通控制方法通过使用交通信号灯、交通路况广播等形式进行交通控制,缺乏信息的协同处理,且面对突发情况处理能力较弱。本文针对智能交通协调控制系统设计研究,对未来智能一体化交通控制有着一定的意义。 1设计目标 面向大规模车流量的智能交通控制网络策略方案的设计关键是必须具有可用性、可靠性和可拓展性的特点(1)可用性:智能交通控制网络终端需要部署在各种交通路段,可以利用射频识别技术将交通信灯、视频监控系统等一系列系统进行组网。(2)可靠性:所设计的控制网络必须具有一定的突发处理的能力,可以在无人干预的情况下有效保障系统可靠的运行。系统设计应具有较强鲁棒性,来保证智能交通控制网络可以具有较长的使用寿命。(3)可扩展性:智能交通控制网络策略必须具有面向未来的拓展能力。系统必须具有较强的可移植性和功能性,可以灵活的进行配置。同时,系统还可以适应未来大规模交通流量的控制需求。 2系统设计 2.1功能设计 研究中在全面剖析了用户的直接需求后指出,本次设计主要包括路段的设置和最短路径的寻找功能。基于此,对比参照了其它道路规划系统,同时又探究总结了现实生活的实际问题,因而设计开发了系统的如下重点功能:路段的增除删改、路段连线的添加和取消、拥堵路段的查看、计算路段的距离和路径的规划。系统功能架构。 2.2数据库设计 数据库的设计原则可表述为:数据共享性、数据独立性、数据的完整性、灵活性,可在短时间内回答用户的复杂、且灵活多样的查询问题、安全性与保密性,对数据指定保护级别和安全控制。在智能交通管控平台的设计中,数据库中会进行各类信息存储,由于不同的管理系统对管理内容提出了具体要求,所以在数据库的设计过程中,需要对管理的信息内容进行考虑,数据库的设计是实现信息获取有效性的一种必要手段,通过利用数据库可以实现信息、资源的有效共享与及时更新,充分保证各项数据信息的时效性,不仅可以进一步强化交通管理,同时还可以进一步提高交通规划的决策力,从而有效缓解道路交通拥挤这一情况[3]。目前数据库设计中主要是包含了车辆基本信息表、阅读器记录表、车辆登记表、检测点交通流量表、路段交通流量信息表这些内容,而这些信息资料将就会被作为交通部门开展各项工作的重要参考依据。具体的设计内容如下:(1)车辆公司在该系统中,系统会对不同的车辆信息建设独立编号,在车辆公司进行信息填写时,系统会将该编号作为用户名,通过信息比对导出该公司的评级(level)、运营状态(status)、所属区域(area)等信息,对于评级属性,设置为枚举类型,运营状态为数据类型,可以选择为0和1,其中1代表停止运营。(2)车辆信息管理部门该系统数据库的设计可选内容为车辆牌照类型、车辆类型,需要填写的内容为车辆所有人或所属企业。(3)渣土车和混凝土罐车在该数据库的设计中,需要能够表述各类信息,由通行证申请者进行填写,根据系统中的信息进行审批结果显示。(4)校车和公交车这两种车辆的主要信息为车辆的行进路线进行管理,同时也需要涵盖车辆所有者和驾驶者信息。 2.3车辆信息管理系统设计 在车辆信息管理系统设计中,核心设计内容与上文相似,在系统中都应用以上编程语言,让系统能够正常运行,但是这些不同种类的车辆,对信息管理有不同的要求,对于渣土车和混凝土罐车来说,Controller类需要添加的功能为通行证申请的进度查询,Service类添加的功能为通行证申请。对于校车和公交车来说,由于需要严格按照规定路线行进,并要有报警功能,所以Controller类的功能为实时处理用户的报警信息,而Service类的功能为进行车辆实际轨迹与规定轨迹间的比对工作。 2.4概念设计 实体-联系图(EntityRelationshipDiagram,E-R图),提供了表示实体型、属性和联系的方法,用来描述现实世界的概念模型。E-R图是表示概念模型的一种方式,构成E-R图的基本要素是实体型、属性和联系。其中,实体型(Entity)用矩形表示,矩形框内写明实体名;属性(Attribute)用椭圆形表示,并用无向边将其与相应的实体连接起来;联系(Relationship)用菱形表示,菱形框内写明联系名,并用无向边分别与有关实体连接起来。根据交通流的概念,研究可得本系统节点表的E-R图。 3系统实现 3.1操作运行步骤 打开本系统,在用户点击载入地图后,将会进行地图的初始化。一般情况下,地图加载都是先加载界面的布局,而后则是地图和定位信息的初始化,对节点信息进行查找和添加,此后再进行图层的初始化。用户可在地图上选择出发地和目的地,当用户点击后,通过接口把程序发送到服务器或用户主机上。进行分析判断,结合拥堵状况后,返回结果。在输出设备上显示最优路径的规划结果。 3.2车辆数据分析 利用电子车牌识别法统计经过车辆数,选取近66天九路口经过车辆进行数据分析。运用数理统计学计算周围八路口对中心路口车辆数集散控制系统工程设计
气动控制系统设计
热电厂机组协调控制系统优化方案
基于MATLAB的控制系统设计软件开发
智能交通协调控制系统设计研究
相关主题
文本预览