汽车试验学作业 车道曲率检测与识别试验 二〇一三年十月
目录 一实验目的 (3) 二研究现状 (3) 三实验条件 (4) (1)实验设备 (4) (2)实验道路 (6) 四试验方法 (6) 五数据处理 (7) 1.曲率计算过程 (7) 2.数据滤波 (8) 六实验验证 (9) 1.路段1曲率半径验证结果。 (10) 2.路段2曲率半径验证结果 (11) 3.结果分析 (12)
一实验目的 换道是驾驶过程中常见的驾驶行为之一,也是一种对驾驶人的决策判断能力和车辆操控能力有较高要求的过程。换道过程中,车辆之间的位置关系体现在纵向和横向两个方面。换道预警系统首先需要分析车辆在横向方向的位移差,用于确定车辆之间的相对车道关系。此外,车辆换道时与周围其他车辆均可能发生冲突,考虑换道行为的特点,换道预警系统重点关注换道过程目标车道后方车辆的运动趋势,判断换道过程中自车与目标车道后方车辆是否发生交通冲突,根据判断结果对驾驶人进行预警。在此之前,换道预警系统首先需要解决以下两个问题:1.后方是否存在车辆。后方是否存在车辆由微波雷达和激光雷达所监测,如果后方存在车辆,微波雷达和激光雷达会测量输出自车与后车的相对距离、相对角度以及相对速度。 2.后方车辆是否处于自车换道的目标车道。如果后方存在车辆,在多车道条件下,需要根据后方车辆与自车的相对角度、相对距离来判断后方车辆是否处于自车换道的目标车道。直道路段情况下,根据相对角度、相对距离数据即可计算出后车与自车在横向方向上的位移差,从而可以根据位移差来辨识该车是否处于换道目标车道。弯道路段情况下,车辆间的车道关系受到道路曲率影响。若已知道路曲率,则可以计算自车和后方车辆在横向方向上的位移差,以此实现对车的识别。 由此可知,道路曲率是影响到换道预警系统工作有效性的重要参数,本实验的目的在于通过车载数据采集设备采集相关车辆运动和道路参数,利用采集参数建立道路曲率估计模型,以提高换道预警系统在弯道下使用的准确性。 二研究现状 国内外研究人员通过使用不同传感器、不同算法对道路曲率进行测量,主要的技术手段如下: 1.机器视觉。机器视觉技术近年来在车辆主动安全领域取得了广泛的应用,通过对道路图像中的车道标线进行识别,并对识别得到的标线进行曲线拟合,计算得到道路曲率。基于机器视觉的方法受到摄像机和微处理器性能限制,曲率测量精度有限、测量距离较近,同时受天气、光线影响强烈。
用物理方法计算抛物线某点处的曲率和曲率半径 对于一般的弧来说,各点处曲率可能不同,但当弧上点A处的曲率不为零时,我们可以设想在弧的凹方一侧有一个圆周,它与弧在点A相切(即与弧有公切线),这样的圆就称为弧上A点处的曲率圆。 对于函数图形某点的曲率和曲率半径,在数学上我们需要用到求二阶导数的方法。 今天我想简单说一种有趣的方法,将该问题用物理的思维来解决,无需求导便能够知道抛物线某点处的曲率和曲率半径。这种方法不属于主流方法,因此不能用它代替常规方法。介绍此方法的目的,只是为了让大家对抛物线及抛体运动和圆周运动乃至整个曲线运动本质上的联系有更加深刻的认识。 举一个最简单的例子:y=-x2,我们作出它的图像 设图像上存在一点A(a,-a2),求该点的曲率和曲率半径。 我们假设一质点从顶点O开始做平抛运动,恰经过A(a,-a2)。 接下来,我们可以算出该点处质点的速度大小:先得到下落时间,接着算出水平速度和竖直速度分量,再合成。质点在该点处速度大小为v=√(g/2+2a2g)。 接下来,我们利用角度关系,将A处的加速度(即重力加速度g)沿速度方向和垂直于速度方向分解,如下图:
令A点处质点速度方向与水平方向的夹角为θ,可得垂直于速度方向的加速度分量为gcosθ。我们可以求出cosθ=v0/v=1/√(1+4a2),那么垂直于速度方向的加速度分量就等于g/√(1+4a2)。 我们想象一下在A点处有个圆与抛物线切于A,且该圆为抛物线A点处的曲率圆,半径为r。 根据圆周运动向心加速度计算式a=v2/r,得到gcosθ=g/√(1+4a2)=(g/2+2a2g)/r。 从而可以求出r=(1/2+2a2)√(1+4a2) 我们用微积分可求出该函数图象某点处曲率半径为:R=|{1+[y’(x)]2}3/2/y”|(x)。 在A点,导数为-2a,二阶导数为-2,所以上式就等于(1+4a2)3/2/2=(1/2+2a2)√(1+4a2)。 与上面算出的半径相等! 因而,曲率半径K=1/r=2/(1+4a2)3/2 抛体运动和圆周运动都是曲线运动,但在高中课本里它们是分开学习的,大家或许曲线运动学得都不错,但或许很少有人想过抛体运动和圆周运动的内在联系。 高中阶段数学还没有曲率半径的概念,写本文的目的并不在于提前灌输曲率知识,也并不代表这种求法能够替代微积分。表面上看,这是一种新的数学求法,但实质上是以数学的形式为物理服务,目的是让大家看到抛体运动和圆周运动这两种曲线运动并不是割裂开的,它们内部有着非常大的联系,甚至可以说本质是相同的,我们甚至可以将抛体运动视为由无数个圆周运动组合而成!
研究生专业课程报告 题目:曲面曲率直接计算方法的比较 学院:信息学院 课程名称:三维可视化技术 任课教师:刘晓宁 姓名:朱丽品 学号:201520973 西北大学研究生处制
曲面曲率直接计算方法的比较 1、摘要 曲面曲率的计算是图形学的一个重要内容,一般来说,曲面的一阶微分量是指曲面的切平面方向和法向量,二阶微分量是指曲面的曲率等有关量.它们作为重要的曲面信息度量指标, 在计算机图形学, 机器人视觉和计算机辅助设计等领域发挥了重要的作用.此文对曲面上主曲率的2种直接估算方法(网格直接计算法和点云直接计算法)进行了论述, 并进行了系统的总结与实验, 并给出了其在颅像重合方面的应用。 关键词曲面曲率、主曲率、点云、三角网格 2、引言 传统的曲面是连续形式的参数曲面和隐式曲面, 其微分量的计算已经有了较完备的方法.随着激光测距扫描等三维数据采样技术和硬件设备的长足进步, 以及图形工业对任意拓扑结构光滑曲面造型的需求日益迫切, 离散形式的曲面———细分曲面、网格曲面和点云曲面正在逐渐成为计算机图形学和几何设计领域的新宠.于是, 对这种离散形式的曲面如何估算微分量, 就成为一个紧迫的课题。 CT扫描技术获得的原始点云和网格数据通常只包含物体表面的空 间三维坐标信息及其三维网格信息,没有明确的几何信息,而在点云和网格的简化、建模、去噪、特征提取等数据处理和模式识别中,常需要提前获知各点的几何信息,如点的曲率、法向量等,也正基于此,点云和网格的几何信息提取算法一直是研究的热点。点的法向量和曲
率通常采用离散曲面的微分几何理论来计算,由于离散曲面分为网格和点集两种形式,其法向量和曲率计算也分为两类: 一类是基于网格的法向量和曲率计算,另一类是基于散点的法向量和曲率计算。由于基于三角网的点云几何信息计算精度一般比较低,通常采用直接计算法。在点云几何信息提取中,常采用基于散乱点的点云几何信息计算方法,该类方法主要是通过直接计算法和最小二乘拟合算法获取点云的局部n 次曲面,然后根据曲面的第一基本形式和第二基本形式求解高斯曲率和平均曲率,而点云的局部曲面表示有两种: 一是基于法向距离的局部曲面表示,二是基于欧几里德距离的局部曲面表示。本节中针对近几年来国际上提出的对三角网格曲面估算离散曲率的直接估算法,从数学思想与表达形式等方面进行系统的归纳与总结. 3、三角网格曲面的曲率的计算及代码实现 为了叙述清楚起见, 引入统一的记号.k 1和k 2表示主曲率,曲面的主曲率即过曲面上某个点具有无穷个曲线,也就存在无穷个曲率(法曲率),其中存在一条曲线使得该曲线的曲率为极大,这个曲率为极大值k 1,垂直于极大曲率面的曲率为极小值k 2。这两个曲率的属性为主曲率。它们代表着法曲率的极值。主曲率是法曲率的最大值和最小值。 H 表示平均曲率,是空间上曲面上某一点任意两个相互垂直的正交曲率的平均值。如果一组相互垂直的正交曲率可表示为K1、K2,那么平均曲率则为:H= (K1 +K 2 ) / 2。 K 表示曲面的高斯曲率, 两个主曲率的乘积即为高斯曲率,又称
第8期周刚等:基于MMP三角曲面测地线算法研究1263(a)窗口传播定义(b)窗口传播类型 (c)光源侧边窗口传播补偿(d)窗口传播中止取消 图5窗口传播的定义和类型 Fig.5Definitionandtypeofwindowpropagation 光线的传播是根据左右射线确定,而不是窗口确 定,因为在传播过程中,在特定的一条边中,由于 在该次传播之前,已经存在窗口,而且存在的窗口 优于目前的窗口,按照文献[8]的方法,该次传播 就此结束,但是对于下一条边,该次传播就可能优于 前次的传播,如图5(d)所示,在Z。上,光源s,所传 播的窗口劣于S。传播的窗口,但是在f:上由于瓯 传播到该边需要折射,所以在z:上,光源Is。所传播 的窗口存在优于光源S,所传播的窗口的情况。当 传播类型为中心传播时,由于曲面是沿着边按照原 来的平面进行旋转得到,所以光线需要分为两支不 同的路径传播。 2.3相交窗口处理 在光线的传播过程中,由于新光源的产生和传 播的路线不同,经过传播以后到达某一边的窗口可 能有多个,并且存在相交的情况。当两窗口相交时, 需要保留到达该边时的经过路径较少的窗口,并且 当一个窗口不能完全覆盖另外一个窗口时,需要区 分窗口的区域。相交窗口处理是窗口传播的关键。 2.3.1相交窗口的数学表达 在同一条边上,当两个窗口相交时它们的参数 [6。,6。]范围的交集非空。在文献[8]中,其窗口的 相交判断做了近似处理,其处理方法为:令该边为菇 轴,原点为该边的起点,建立平面直角坐标系,根据 窗函数参数,可以确定两窗口各自光源在该坐标系 中的位置坐标(横坐标为非负),然后根据窗函数的 参数求出筇轴上一点到两窗口光源距离相等的点源 (P。,0),根据该等距点的位置划分相交窗口的覆盖区域。该方法对于窗口相交的命题是完全正确和充分的,但是在求解过程中,却做了极大的简化,只是考虑较多情况中的一种可能,所以在较复杂的条件下,其测地线求解的结果可能发生偏移(如图6所示)。其原因是由于错误划分窗口区域而导致该边中有部分区域的光照距离变长,而当该距离变长区域是实际测地线通过的区域时,就出现了如图5所示的结果(原因如图7所示)。 图6窗口相交简化出现的测地线偏差 Fig.6GeodesicenorifBimplerof windowsinh;I暑ection 相交窗口的区域划分点实际上是z轴上到两光源的在直角坐标系中的距离差等于光源值差的点。也就是以两光源为焦点,光源值差为定值的双曲线和z轴的交点(如图8所示)。那么问题就转化为 在窗口相交区域内,即为名轴上的点落在双曲线不
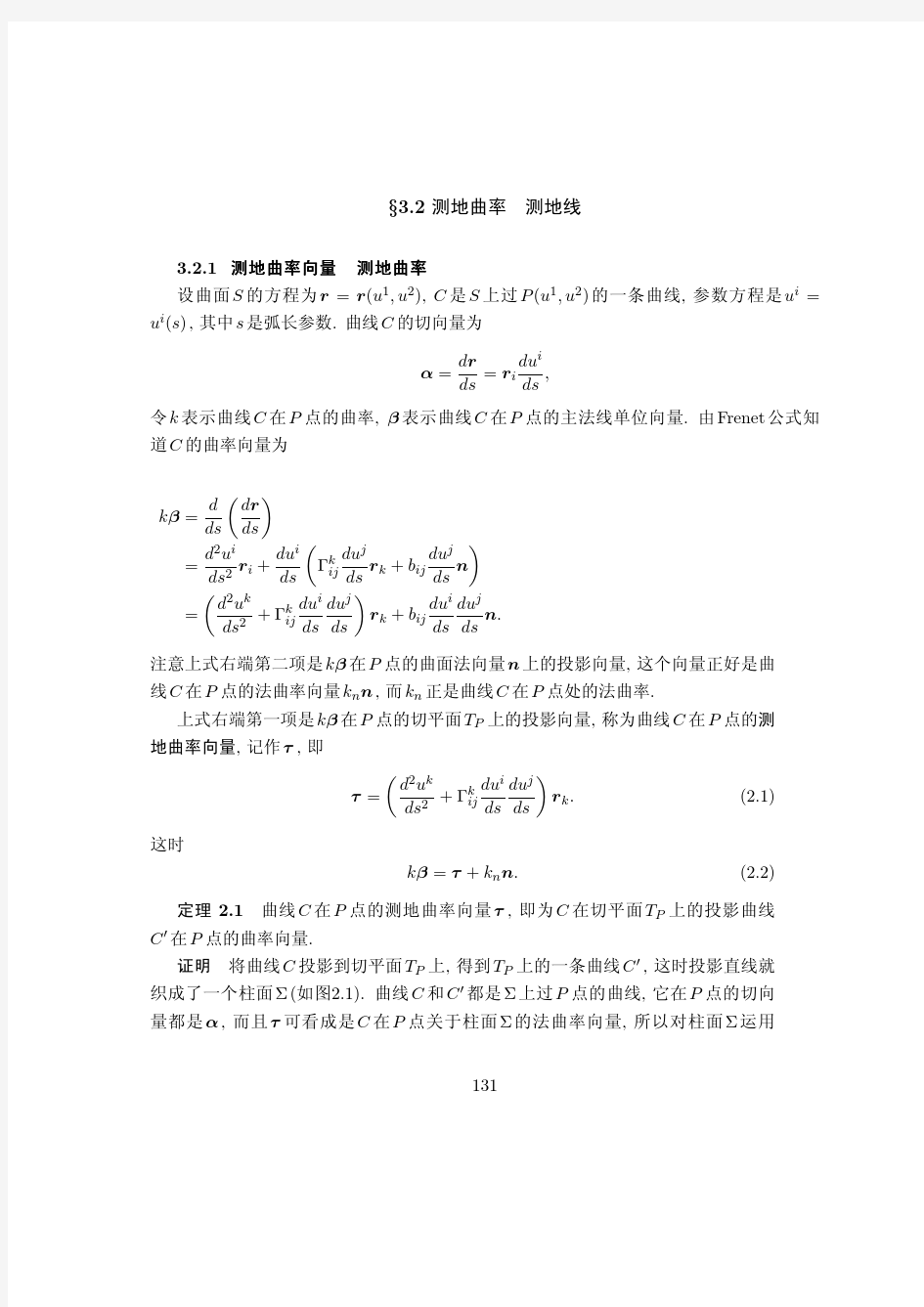
第六章曲面的内蕴几何初步 本章将对曲面的内蕴几何展开进一步讨论.前面已经知道,曲面的第一基本形式确定了曲面的度量性质;同时,对于确定曲面的局部弯曲性质而言,曲面的Gauss曲率以及曲面上的曲线的测地曲率都是重要的内蕴几何量,它们衡量了几何对象的内在弯曲程度,这种内在弯曲在本质上依赖于曲面的度量性质.对于内蕴性质的细致讨论,将会为抽象理论提供可靠的直观基础,便于用自然和合理的方式引进新的几何空间概念并深入理解较为抽象的几何空间.在本章的学习过程中,应该注意体会什么是空间的基本要素. §1测地曲率与测地线 在第四章中已经知道,曲面上的曲线的测地曲率是曲面的内蕴几何量,并且是平面曲线相对曲率的推广.下面对此进行进一步的讨论. 一.测地曲率的Liouville公式 平面曲线相对曲率可以利用切向角关于弧长的导数而确定;类似地,曲面上的曲线的测地曲率也可以利用适当的切向角来加以刻画.在正交网下考虑.设曲面S: r=r(u1, u2) 的参数网正交,考虑其上的弧长s参数化曲线C: u i=u i(s) 的测地曲率.为此,取自然标架场 {r; r1, r2, n} 所对应的单位正交右手标架场 {r; ξ1, ξ2, n} ,其中 ξ1=r1 |r1| = r1 g11 = r1 E ,ξ2= r2 |r2| = r2 g22 = r2 G ,g12=F≡ 0 . 沿曲线C可写 T=r i d u i d s= ξ1g11 d u1 d s+ ξ2g22 d u2 d s =ξ1 cosψ+ξ2 sinψ, 其中夹角函数ψ=ψ(s) 在曲线C局部总可取到连续可微的单值支,满足(1.1)cosψ=g11|(u1(s), u2(s))d u1 d s,sinψ=g22|(u1(s), u2(s))d u2 d s. 故由测地曲率定义式出发进行推导可得 κg=T'(s)?[n(u1(s), u2(s))?T(s)] = [n(u1(s), u2(s))?T(s)]?T'(s)
通信电缆的分类及特点 双屏蔽数字同轴电缆的技术要求:电缆安装敷设温度为-5—50度,储存和工作温度为-30—70度。电缆安装与运行的最小弯曲半径为电缆最大外径的7.5倍。 机房设备安装的工艺要求 电缆布放:电缆转弯应均匀圆滑,转弯的曲率半径应大于电缆直径的5倍 光缆布放:槽道内光纤应顺直、不扭绞,拐弯处曲率半径应不小于光缆直径的20倍 天馈线系统安装要求 移动基站馈线系统和室外光缆:馈线拐弯应圆滑均匀,弯曲半径应大于或等于馈线外径的20倍,软馈线的弯曲半径应大于或等于其外径的10倍 卫星地球站馈线系统:同轴电缆馈线转弯的曲率半径应不小于电缆直径的12倍,LDF4-50欧姆的同轴电缆转弯的曲率半径应不小于125mm 电源施工技术馈电母线安装和电源线信号线布放:铠装电力电缆的弯曲半径不得小于外径的12倍,塑包线和胶皮电缆不得小于其外径的6倍 线路工程通用施工技术 电缆曲率半径必须大于共外径的15倍 直埋线路施工技术 直埋光(电)缆敷设安装及保护:光缆在各类管材中穿放时,管材内径应不小于光缆外径的1.5倍 综合布线工程施工技术 电缆布放中的注意事项:应避免电缆过度弯曲,安装后的电缆弯曲半径不得低于电缆直径的8倍;对典型的六类电缆,弯曲半径应大于50mm。
气流敷设光缆技术 硅芯管道的敷设:直线段硅芯管道的路由要顺直,沟坎处应平缓过渡,转角处的弯曲半径,50/42mm、46/38塑料管的弯曲半径应大于550mm;40/30mm塑料管的弯曲半径应大于500mm。 广播电视发射工程技术 敷设低压电力电缆:10mm2以上的电缆弯曲时,其最小曲率半径为电缆外径的10倍。广播电视建筑声学施工技术 扩声、会议系统安装工程布放线要求:光缆布放时最小弯曲半径应为光缆外径的15倍,施工时应不小于20倍。
上图中,从左到右依次为G0—G4的过度面
最外侧是G4
注意看平面和过度面的连接处 G0—G4连续性的名称分别叫做:G0-位置连续;G1-切线连续;G2-曲率连续;G3-曲率变化率连续;G4-曲率变化率的变化率连续 用这些术语描述曲面的连续性。曲面连续性可以理解为相互连接的曲面之间过渡的光滑程度。提高连续性级别可以使表面看起来更加光滑、流畅。 连续性类型: G0-位置连续
图中的两组线都是位置连续,他们只是端点重合,而连接处的切线方向和曲率均不一致。这种连续性的表面看起来会有各很尖锐的接缝,属于连续性种级别最低的一种。
图中的两组曲线属于切线连续,他们不仅再连接处端点,而且切线方向一致(可以看到连接的两条线段梳子图的刺在接触点位置是在一条直线上的)。用过其他PC插图软件的拥护,比如COREDRAW,实际上通常得到的都是这种连续性的曲线。 这种连续性的表面不会有尖锐的连续性接缝,但是由于两种表面在连接处曲率突变,所以在视觉效果上依然会有很明显的差异,会有一种表面中断的感觉。 通常用倒角工具生产的过度面都属于这种连续性级别。因为这些工具通常使用圆周与两各表面切点间的一部分作为倒角面的轮廓线,圆的曲率是固定的,所以结果会产生一个G1连续的表面。如何想生成更高质量的过度面,还是需要自己动手。
图中的两组曲线属于曲率线续。顾名思义,他们不但符和上述两种连续性的特征,而且在接点处的曲率也是相同的。如图中所示,两条曲线相交处的梳子图的刺长度和方向都是一致的(可以为0)。 这种连续性的曲面没有尖锐接缝,也没有曲率的突变,视觉效果光滑流畅,没有突然中断的感觉(可以用斑马线测试)。 这通常是制作光滑表面的最低要求。也是制作A级面的最低标准。
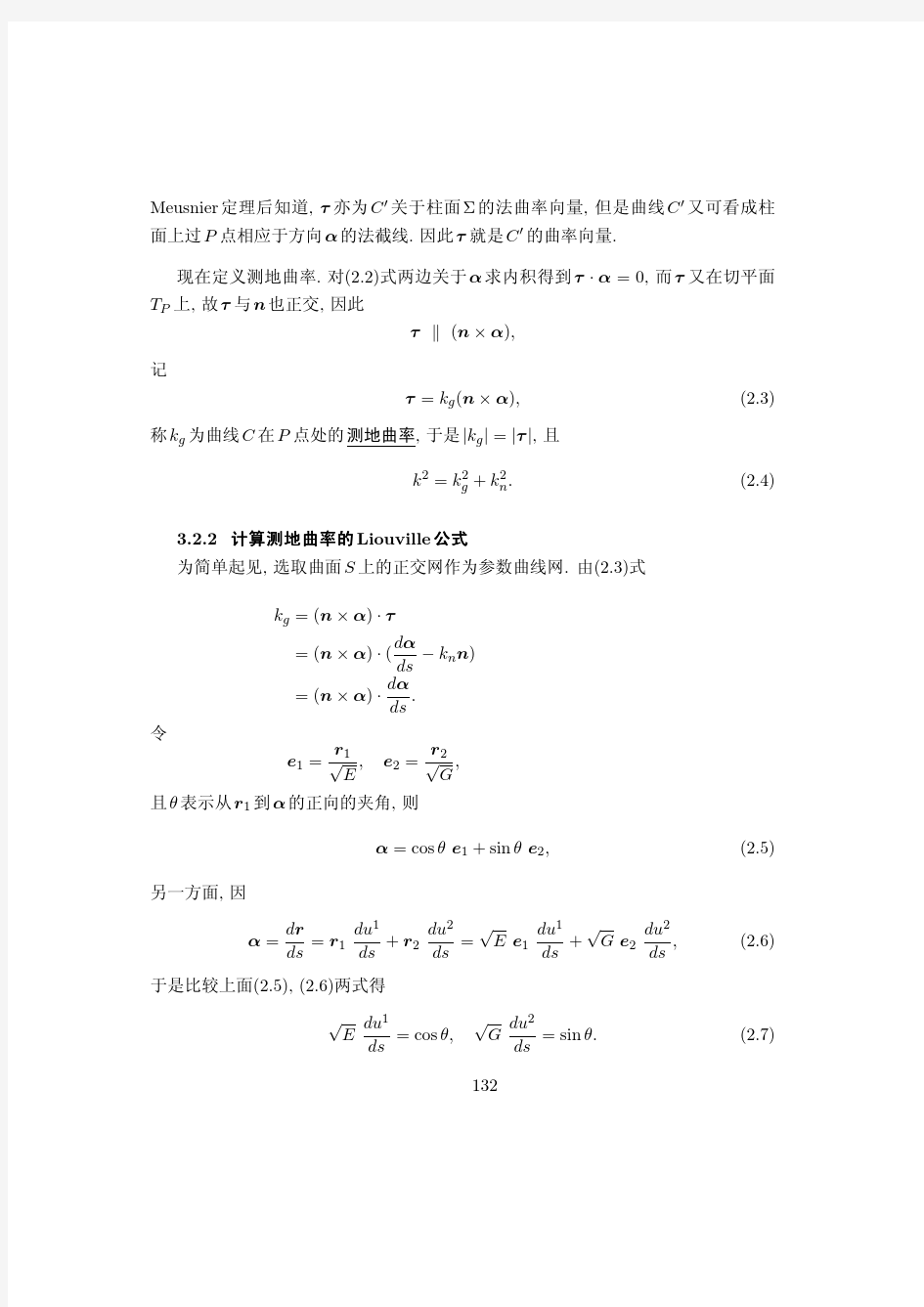
《微分几何》 期终考试题(A) 班级:____ 学号:______ 姓名:_______ 成绩:_____ 一、 填空题(每空1分, 共20分) 1. 半径为R 的球面的高斯曲率为 ;平面的平均曲率为 . 2. 若的曲率为,挠率为)(t r )(t k )(t τ,则关于原点的对称曲线的曲率为 )(t r ;挠率为 . 3. 法曲率的最大值和最小值正好是曲面的 曲率, 使法曲率达到最大值和最小值的方向是曲面的 方向. 4. 距离单位球面球心距离为)10(< 二、 单项选择题(每题2分,共20分) 1. 等距等价的两曲面上,对应曲线在对应点具有相同的 【 】 A. 曲率 B. 挠率 C. 法曲率 D. 测地曲率 2. 下面各对曲面中,能建立局部等距对应的是 【 】 A. 球面与柱面 B. 柱面与平面 C. 平面与伪球面 D. 伪球面与可展曲面 3. 过空间曲线C 上点P (非逗留点)的切线和P 点的邻近点Q 的平面π,当Q 沿曲线趋于点C P 时,平面π的极限位置称为曲线C 在P 点的 【 】 A. 法平面 B. 密切平面 C. 从切平面 D. 不存在 4. 曲率和挠率均为非零常数的曲线是 【 】 A. 直线 B. 圆 C. 圆柱螺线 D. 平面曲线 5. 下列关于测地线,不正确的说法是 【 】 A. 测地线一定是连接其上两点的最短曲线 B. 测地线具有等距不变性 C. 通过曲面上一点,且具有相同切线的一切曲线中,测地线的曲率最小 D. 平面上测地线必是直线 6. 设曲面的第一、第二基本型分别是,则曲面的两个主曲率分别是 【 】 2222,Ndv Ldu II Gdv Edu I +=+= A.G N k E L k ==21, B. N G k L E k ==21, C. v E G k k ???==ln 21 21 D. u G E k k ??==ln 2121 7. 曲面上曲线的曲率,测地曲率,法曲率之间的关系是 【 】 k g k n k 第四章 曲面的第二基本形式与曲面上的曲率 §5 曲面上的曲率概念 利用上一节所作的准备,围绕曲面弯曲状况的刻画,本节将引入曲面上的基本的和重要的曲率概念,并简要讨论相关的几何体. 一.主曲率 定义1 曲面 S 上的点 P 处的法曲率关于切方向的两个最值,分别称为曲面 S 在点 P 处的主曲率;使得法曲率达到最值的两个切方向,分别称为曲面 S 在点 P 处的主方向. 注记1 ① Weingarten 变换的特征值和特征方向,分别是曲面的主曲率和主方向. ② 当两个主曲率 κ1(P ) ≠ κ2(P ) 时,曲面在点 P 处有且仅有正交的两组主方向,每一组的单位化向量分别就是Weingarten 变换的单位正交特征向量.而当两个主曲率 κ1(P ) = κ2(P ) 时,曲面在点 P 处的任何非零切向都是主方向,Weingarten 矩阵 ω(P ) = κ1(P )I 2 ,即 Ω(P ) = κ1(P )g (P ) . 主曲率和主方向的计算,自然归结为Weingarten 变换的特征值和特征方向的计算,也就是Weingarten 矩阵的特征值和特征方向的计算.即: ① 对于主曲率的算法,当易知Weingarten 矩阵 ω 之时,方程为 (4.3) 式,或直接写为 (5.1) |ω - λI 2 | = 0 ; 等价地,当易知系数矩阵 Ω 和 g 之时,其方程可变形为 (5.2) |Ω - λg | = 0 . ② 对于主方向的算法,各种等价算式为 a = a i r i ≠ 0 为主方向,即非零切方向 a 1:a 2 为主方向 ? ?λ , ?(a 1, a 2)ω = λ(a 1, a 2) , (a 1, a 2) ≠ (0, 0) ? ?λ , ?(a 1, a 2)Ω = λ(a 1, a 2)g , (a 1, a 2) ≠ (0, 0) ? det. ????(a 1, a 2 )Ω (a 1, a 2)g = 0 曲率半径 曲线的曲率。平面曲线的曲率就是是针对曲 线上某个点的切线方向角对弧长的转动率,通过 微分来定义,表明曲线偏离直线的程度。 K=lim|Δα/Δs| Δs趋向于0的时候,定义 k就是曲率。 曲率的倒数就是曲率半径。 曲率半径主要是用来描述曲线上某处曲线 弯曲变化的程度特殊的如:一个圆上任一圆弧的 曲率半径恰好等于圆的半径 ,也许可以这样理 解:就是把那一段曲线尽可能的微分,直到最后近似一个圆弧,这个圆弧对应的半径吧,个人理解 比如说 曲率/曲率半径应用题 一飞机沿抛物线路径y=(x^2)/10000(y轴铅直向上,单位为m)作俯冲飞行,在 坐标原点O处飞机的速度为v=200m/s。飞行员体重G=70kg。求飞机俯冲至最 低点即原点O处时座椅对飞行员的反力。 解: y=x^2/10000 y'=1/2x/10000=x/5000 y"=1/5000 要求飞机俯冲至原点O处座椅对飞行员的反力,令x=0,则: y'=0 y"=1/5000 代入曲率半径公式ρ=1/k=[(1+y'^2)^(3/2)]/∣y"∣=5000米 所以飞行员所受的向心力F=mv^2/ρ=70*200^2/5000=560牛 得飞机俯冲至原点O处座椅对飞行员的反力 R=F+mg=560+70*9.8=1246N 地方平均曲率半径 R=C/(V*V)=6399698.90178/(1+0.006738525*(COSA)*(COSA)),A为当地的平均纬度。 法截弧曲率半径 地球椭球体表面上某点的法截弧在该点的曲率半径。 法截弧曲率半径 地球椭球体表面上某点的法截弧在该点的曲率半径。 高斯投影长度变形 圆柱面与椭球面相切于中央子午线上,其长度不变形,其他任意处的投影长度均变化。 曲率属性的应用 刻画断裂/裂缝及其它地质特征的地震曲率属性 Satinder Chopra 和Kurt Marfurt 著曹鉴华译 原文链接:http://www.cseg.ca/publications/recorder/2007/11nov/nov2007-seismic-curvature.pdf 地震属性对于地震解释来说能够起到非常强大的帮助作用,例如在地震属性上断裂和河道表现为不同的图像特征,由此地质科学家就能用来揭示沉积环境和构造变形的历史。迄今为止,地震属性已经应用了差不多40年了,一些重要属性并没有得到显著发展或者获得认可,直到上世纪90年代初三维地震技术开始广泛应用。Bahorich和Farmer在1995年提出的相干属性已经称为了一种常规的解释手段,现在大部分解释系统上都提供了该技术。 曲率属性在90年代中期引入到解释流程中,计算方式为用层面计算,其结果显示与露头资料上存在的断裂有很紧密的联系(Lisle,1994;Roberts,2001)。最近体曲率属性开始流行起来,解释人员可以从沿层面属性上识别出小的扰曲、褶皱、凸起、差异压实特征,这些在常规解释时是无法追踪的、相干上也呈现为连续高相干特征。本文将讨论地震曲率属性及其实际应用。 通常意义上曲率是用来表征层面上某一点处变形弯曲的程度。层面变形弯曲越厉害,曲率值就会越大。如果将这些构造变形如扰曲、褶皱等定量结果与更常规的断裂图像结合起来,地质科学家就能利用井控下的构造变形模型来预测古应力和有利于天然裂缝分布的区域。曲率属性除了可用于刻画断裂和裂缝外,还能对一些地质特征进行呈现,后面将有叙述。 对于一个二维的曲线而言,曲率可以定义为某一点处正切曲线形成的圆周半径的导数。(如图1)如果曲线弯曲褶皱厉害,曲率值就比较大,而对于直线不管水平或倾斜其曲率就是零。一般背斜特征时定义曲率值为正值,向斜特征定义曲率值为负值。 第13卷第5期2006年10月 特种油气藏 Special0ilandGasReseⅣoirs V01.13No.5 0ct.20()6 文章编号:1006—6535(2006)05—0082—03 前言 中曲率水平井入靶设计与控制技术 任志杰 (中油辽河油田公司,辽宁盘锦124010) 摘要:入靶精度体现了造斜段的轨迹控制水平,也是水平段钻遇油层的前期保证。通过总结辽河油田近几年完成的数十口水平井的设计与施工情况,对水平井入靶设计和施工中着陆点的控制提出了若干原则和方法,对于不同类型水平井的入靶设计与施工具有指导意义。 关键词:水平井钻井;轨迹设计;轨迹控制;着陆点 中图分类号:rIE243文献标识码:A 辽河油田水平井钻井技术始于20世纪80年代末期。经过近几年的深入研究和发展,中曲率水平井已作为常规钻井技术广泛应用于各种类型油藏的开发。由于辽河油田主力油区已进入开发中后期,所钻水平井大都受地质条件限制,如油层薄且地层倾角不稳定、边底水锥进严重、井网密集、井问防碰问题突出等。因此,实钻中对轨迹控制精度的要求越来越高,不仅特殊油藏需严格控制井身轨迹,即使是厚层状油藏,若想得到较高的储量控制程度,合理控制井身轨迹也是十分必要的,而要合理有效地控制井身轨迹,目的层着陆点的控制就显得尤为重要,它不仅体现了造斜段轨迹控制的水平,对后期水平段轨迹控制也有着很大的影响。通过多年的水平井设计、施工与技术研究,水平井入靶设计与控制技术已经成熟。 1入靶点的确定方法 (1).在区块边界钻水平井,如果地质条件不太清楚,且不具备先进的随钻地质导向测量系统(¨∞),一般采用导眼回填方法卡准油层准确位置,以此确定人靶点位置。 导眼回填方式分为无导眼回填、直导眼回填和斜导眼回填3种方式。无导眼回填与直导眼回填的轨迹钻达预计油层垂深时,其位移距设计靶点位移有一定距离,适用于变化不大、分布较广的油层;对于地质构造较复杂的油层,应采用斜导眼回填方式确定油层精确位置。 (2)在老区块内钻水平井,如果周围邻井较多,目的层地质情况也较为清楚,则不必单独钻导眼进行油层入靶点的确定,除非需要了解其它重要地质资料而进行导眼设计与施工。 2剖面设计与人靶轨迹控制 2.1剖面设计 水平井剖面设计是水平井设计中的重要部分,设计的好坏直接关系到水平井能否顺利完成。应对剖面进行优化设计,优选造斜点。造斜点至人靶点,一般设计剖面为增~稳一增3段制,应做到以下几方面: (1)按地层的倾角及地层的硬度,并考虑造斜工具的误差及人为因素来选择造斜点。 (2)选择能满足造斜率要求的造斜工具,并提示给施工单位,以防造斜井段不够。 (3)靶前位移要充分考虑穿透油层的厚度。 实际施工过程中,要强化造斜点上部直井段的技术要求,尤其对造斜点深的水平井,直井段产生的位移对造斜段施工、入靶及水平段施工都有较大影响。 稳斜段长度一般设计为30。50m,用来调整第1次造斜后实际轨迹与设计轨迹的偏差。合理选择增斜段的造斜率,是水平井设计与施工的关键。除了考虑螺杆的理论造斜能力外,还必须参考本地区的地质条件、造斜过程中的某些特殊井段(比如初始造斜段的造斜率低)以及测量仪器和完井管柱的通过能力,尽量使设计的造斜率低而且接 收稿日期:20嘶一03一06:改回日期:2006—07—20 作者简介:任志杰(1973~),男,?工程师,1994年毕业于西南石油学院,现从事钻井工程设计与施工管理工作。 万方数据 . 研究生专业课程报告 题目:曲面曲率直接计算方法的比较 学院:信息学院 课程名称:三维可视化技术 任课教师:刘晓宁 姓名:朱丽品 学号: 201520973 西北大学研究生处制 曲面曲率直接计算方法的比较 1、摘要 曲面曲率的计算是图形学的一个重要内容,一般来说,曲面的一阶微分量是指曲面的切平面方向和法向量,二阶微分量是指曲面的曲率等有关量.它们作为重要的曲面信息度量指标, 在计算机图形学, 机器人视觉和计算机辅助设计等领域发挥了重要的作用.此文对曲面上主曲率的2种直接估算方法(网格直接计算法和点云直接计算法)进行了论述, 并进行了系统的总结与实验, 并给出了其在颅像重合方面的应用。 关键词曲面曲率、主曲率、点云、三角网格 2、引言 传统的曲面是连续形式的参数曲面和隐式曲面, 其微分量的计算已经有了较完备的方法.随着激光测距扫描等三维数据采样技术和硬件设备的长足进步, 以及图形工业对任意拓扑结构光滑曲面造型的需求日益迫切, 离散形式的曲面———细分曲面、网格曲面和点云曲面正在逐渐成为计算机图形学和几何设计领域的新宠.于是, 对这种离散形式的曲面如何估算微分量, 就成为一个紧迫的课题。 CT扫描技术获得的原始点云和网格数据通常只包含物体表面的空间三维坐标信息及其三维网格信息,没有明确的几何信息,而在点云和网格的简化、建模、去噪、特征提取等数据处理和模式识别中,常需要提前获知各点的几何信息,如点的曲率、法向量等,也正基于此,点云和网格的几何信息提取算法一直是研究的热点。点的法向量 和曲率通常采用离散曲面的微分几何理论来计算,由于离散曲面分为网格和点集两种形式,其法向量和曲率计算也分为两类: 一类是基于网格的法向量和曲率计算,另一类是基于散点的法向量和曲率计算。由于基于三角网的点云几何信息计算精度一般比较低,通常采用直接计算法。在点云几何信息提取中,常采用基于散乱点的点云几何信息计算方法,该类方法主要是通过直接计算法和最小二乘拟合算法获取点云的局部n 次曲面,然后根据曲面的第一基本形式和第二基本形式求解高斯曲率和平均曲率,而点云的局部曲面表示有两种: 一是基于法向距离的局部曲面表示,二是基于欧几里德距离的局部曲面表示。 本节中针对近几年来国际上提出的对三角网格曲面估算离散曲率的直接估算法,从数学思想与表达形式等方面进行系统的归纳与总结. 3、三角网格曲面的曲率的计算及代码实现 为了叙述清楚起见, 引入统一的记号.k 1和k 2表示主曲率,曲面的主曲率即过曲面上某个点具有无穷个曲线,也就存在无穷个曲率(法曲率),其中存在一条曲线使得该曲线的曲率为极大,这个曲率为极大值k 1,垂直于极大曲率面的曲率为极小值k 2。这两个曲率的属性为主曲率。它们代表着法曲率的极值。主曲率是法曲率的最大值和最小值。 H 表示平均曲率,是空间上曲面上某一点任意两个相互垂直的正交曲率的平均值。如果一组相互垂直的正交曲率可表示为K 1、K 2, 第41卷 第11期2018年11月计 算 机 学 报CHINESEJOURNAL OF COM PUTERS Vol.41No.11Nov.2018 收稿日期:2016-05-29;在线出版日期:2017-08-29.本课题得到国家自然科学基金(61402077,61432003,61328206,11171052,61876030)、教育部新世纪优秀人才支持计划(NCET -11-0048)资助.贾 棋,女,1983年生,博士,副教授,中国计算机学会(CCF )会员,主要研究方向为数字图像处理、计算机视觉.E -mail :j ia q i @https://www.doczj.com/doc/986277241.html,.于美玉,女,1992年生,硕士研究生,主要研究方向为计算机视觉.樊 鑫(通信作者),男,1977年生,博士,教授,主要研究领域为计算机视觉、图像处理.E -mail :xin.fan @https://www.doczj.com/doc/986277241.html,.高新凯,男,1993年生,硕士研究生,主要研究方向为计算机视觉.郭 禾,男,1955年生,博士,教授,主要研究领域为并行与分布式计算、计算机视觉.基于曲率分级的形状编码及识别方法 贾 棋 于美玉 樊 鑫 高新凯 郭 禾(大连理工大学国际信息与软件学院 辽宁大连 116621)摘 要 形状识别是计算机识别领域中的基本问题,可以广泛地应用于对象识别、图像检索、图像配准、目标追踪等各个领域.现在的形状识别方法主要利用形状轮廓上采样点的相关性形成特征描述子,在实际应用中由于缩放、旋转、仿射、射影等变换,无法获取采样点之间的对应关系,形状匹配时间长,识别率低.为了克服基本的特征描述子的局限性,该文提出了一种基于曲率分级的形状编码方法.首先,将射影不变量引入到形状的基本表示中,以保证形状描述在各种变换下的稳定性;其次,以形状轮廓段为基本编码单位,对基本的描述子进行聚类编码;最后,为了使编码结果更好地代表形状轮廓信息,作者采用一种对轮廓段曲率分级的方式,将不同曲率级别的编码用max _p oolin g 的方式提取特征作为形状的最终编码.在通用数据库上的实验表明,该方法可以有效地识别在射影变换下的形状,识别率高达98%,较基本的特征描述子提高了近10%,与其它基于编码的方法相比也有一定的优势. 关键词 形状识别;射影变换;轮廓段;特征编码中图法分类号TP391 DOI 号10.11897/SP.J.1016.2018.02453Sha p eCodin g and Reco g nition M ethodBasedonCurvatureClassification JIA Qi YU M ei -Yu FAN Xin GAO Xin -Kai GUO He (InternationalSchool o f In f ormation Science &En g ineerin g ,DalianUniversit y o f Technolo gy ,Dalian ,Liaonin g 116621)Abstract Sha p e is an advanced visual feature of ima g e because it can be used to re p resent the structure and attitudeoftheob j ect.Thesecharacteristicsarenotavailableinob j ectcolorandtexture.Based on these advanta g es these advanta g es ,sha p e is widel y considered for ob j ect reco g nition.Sha p e reco g nition is a fundamental p roblem in com p ute vision communit y and is becomin g more p ractical and g ettin g moreattention ,itcouldbeusedinvariousareas ,suchasob j ectreco g nition ,ima g e retrieval ,tar g et trackin g and ima g ere g istration.At p resent ,M ostofthe existin g a pp roaches mainl y focus on desi g nin g low level sha p e descri p tors.Sha p e reco g nition is usuall y considered as a classification p roblem.Given a set oftrainin g sha p es and cate g or y label of each trainin g sha p e ,sha p e reco g nition method needs to determine which cate g or y a testin g sha p e belon g s to.These traditional a pp roaches have similar classification p rocesses as mostofthemarebasedonmatchin g sha p e descri p tors of two different sha p es.Thus sha p e descri p tor is a ke y p oint in reco g nition task.For these a pp roaches ,the y have similar p rocesses to extract sha p e descri p tors ,First ,the critical p oints ofthesha p esareextractedandthentherelevanceofcontour p ointsis com p uted ,in g eneral ,the relevance would be re g arded as features of these p oints.Finall y ,sha p e features are re p resented as the features of each p oint.After g ettin g the sha p e descri p tors ,The corres p ondences between q uer y sha p e and trainin g sha p es are crucial for matchin g al g orithms.M atchin g strate g ies ,suchas Hun g arianal g orithm ,d y namic p ro g rammin g al g orithm ,arewidel y usedinfeaturematchin g . 万方数据 测地线 中文名称:测地线 英文名称:geodesic 定义:在包含待测两点内的地球面上测得的两点之间的最短线。 应用学科:船舶工程(一级学科);船舶通信导航(二级学科) 目录 测地线 测地线效应 测地线 测地线效应 展开 测地线 又名 测地线又称大地线或短程线,可以定义为空间中两点的局域最短或最长路径。测地线(Geodesic)的名字来自于对 于地球尺寸与形状的大地测量学(Geodesy)。 定义 类似地球这样的物体并非由于称为引力的力使之沿着弯曲轨道运动,而是它沿着弯曲空间中最接近于直线的称之为测地线的轨迹运动。例如,地球的表面是一弯曲的二维空间。地球上的测地线称为大圆,是两点之间最近的路径。由于测地线是两个机场之间的最短程,这正是领航员叫飞行员飞行的航线。在广义相对论中,物体总是沿着四维时空的直线走。尽管如此,在我们的三维空间看起来它是沿着弯曲的途径(这正如同看一架在非常多山的地面上空飞行的飞机。虽然它沿着三维空间的直线飞,在二维的地面上它的影子却是沿着一条弯曲的路径)。 力的作用,物体将在类时或类光测地线上运动(因为没有物体的速度能超过光速) 例如,地球这样的物体并非收到称作引力的力的作用而沿着弯曲轨道运动;相反,他们之所以沿着弯曲轨道运动,是因为在弯曲空间中,他们遵循着一条最接近直线的路径运动,这个路径称作测地线。用专业术语来说,测地线的定义就是相邻两点之间最短(或最长)的路径。 测地线效应 概述 也称作测地线进动(Geodetic Effect或Geodetic Precession)是指在广义相对论预言下引力场的时空曲率对处于其中的具有自旋角动量的测试质量的运动状态所产生的影响,这种影响造成了测试质量的自旋角动量在引力场内沿测地线的进动。这种效应在今天成为了广义相对论的一种实验验证方法, 物理学讲堂 ·45卷(2016年)2期 图1平行移动(a)平面上平行移动一圈;(b)球面上平行移动一圈 图2在纬度α的圆上以及在赤道上切矢量的平行移动有所不同 首先以平面和球面为例,再重温《广义相对论与黎曼几何系列之九:二维曲面上的平行移动和曲率》一文中介绍的平行移动。图1是在平面和球面上分别作平行移动的例子:女孩从点1到点2再到点3,一直到点7,作平行移动一圈后回到点1(1和7是同一点)。所谓“平行移动”的意思是说,她在移动的时候,尽可能保持身体(或是她的脸)相对于身体的中心线没有旋转。这样,当她经过1,2,3……回到1的时候,她认为她应该和原来出发时面对着同样的方向。她的想法是正确的,如果她是在平面上移动的话(图1(a))。但是,假如她是在球面上移动的话,她将发现她面朝的方 向可能不一样了!图1(b)中红色箭头所指示的便是她在球面上每个位置时面对的方向。从图中可见,出发时她的脸朝左,回来时却是脸朝右。 平行移动的概念不仅可以被用来定义曲面的曲率,也可以被用来定义测地线。 测地线是欧几里德几何中“直线”概念在黎曼几何中的推广。从整体来说,欧氏几何中的直线,是两点之间最短的连线,就局部而言,可以用“切矢量方向不改变”来定义它。将后面一条的说法稍加改动,便可以直接推广到黎曼几何中:“如果一条曲线的切矢量关于曲线自己是平行移动的,则该曲线为 测地线。”在《广义相对论与黎曼几何系列之八:平行移动和协变微分》一文中,曾经给出矢量V 平行移动时在列维—齐维塔联络意义下的逆变分量坐标表达式:d V j /d s +Γj np V n d x p /d s =0。根据上述测地线的定义,如果将其中的V j 用切矢量的分量(d x j /d s )代替的话,便可得到用克里斯托费尔符号表示的测地线的方程: 再以球面为例,我们可以利用上一节中采取的方法来研究切矢量的平行移动。一般来说,沿着球面上纬度为α的圆的平行移动等效于在一个锥面“帽子”上的平行移动。然而,当α=0时(对应于赤道),锥面变成了柱面,如图2左图所示。因而可以将锥面或柱面(赤道)展开成平面来研究球面上的平行移动。图2的中图和右图分别是锥面和柱面展开成平面后平行移动的示意图。从这两个图中可以看出,切矢量的平行移动对α=0(赤道)和α>0 (非赤道)两种情形有所不同。对于小于赤道的圆,从锥面展开的平面图可知,点1的切矢量,平行移动到2,3,……各点后不一定再是切矢 量;而赤道在柱面展开的平面图中是一条直线,所以,在赤道上,点1的切矢量平行移动到2,3,……各点后仍然是切矢量。因此,如赤道这样的“大圆”,即圆心与球心重合 ··124第四章 曲面的第二基本形式与曲面上的曲率
曲率半径
曲率属性的应用
中曲率水平井入靶设计与控制技术
曲面曲率计算方法的比较与分析
基于曲率分级的形状编码及识别方法
测地线
广义相对论与黎曼几何系列之十:测地线和曲率张量
相关主题
文本预览