此文档下载后即可编辑 随机数字信号处理期末大作业(报告) 基于卡尔曼滤波器的雷达目标跟踪 Radar target tracking based on Kalman filter 学院(系):创新实验学院 专业:信息与通信工程 学生姓名:李润顺 学号:21424011 任课教师:殷福亮 完成日期:2015年7月14日
大连理工大学Dalian University of Technology
摘要 雷达目标跟踪环节的性能直接决定雷达系统的安全效能。由于卡尔曼滤波器在状态估计与预测方面具有强大的性能,因此在目标跟踪领域有广泛应用,同时也是是现阶段雷达中最常用的跟踪算法。本文先介绍了雷达目标跟踪的应用背景以及研究现状,然后在介绍卡尔曼滤波算法和分析卡尔曼滤波器性能的基础上,将其应用于雷达目标跟踪,雷达在搜索到目标并记录目标的位置数据,对测量到的目标位置数据(称为点迹)进行处理,自动形成航迹,并对目标在下一时刻的位置进行预测。最后对在一个假设的情境给出基于卡尔曼滤波的雷达目标跟踪算法对单个目标航迹进行预测的MATLAB仿真,对实验的效果进行评估,分析预测误差。 关键词:卡尔曼滤波器;雷达目标跟踪;航迹预测;预测误差;MATLAB 仿真 - 1 -
1 引言 1.1 研究背景及意义 雷达目标跟踪是整个雷达系统中一个非常关键的环节。跟踪的任务是通过相关和滤波处理建立目标的运动轨迹。雷达系统根据在建立目标轨迹过程中对目标运动状态所作的估计和预测,评估船舶航行的安全态势和机动试操船的安全效果。因此,雷达跟踪环节工作性能的优劣直接影响到雷达系统的安全效能[1]。 鉴于目标跟踪在增进雷达效能中的重要作用,各国在军用和民用等领域中一直非常重视发展这一雷达技术。机动目标跟踪理论有了很大的发展,尤其是在跟踪算法的研究上,理论更是日趋成熟。在跟踪算法中,主要有线性自回归滤波、两点外推滤波、维纳滤波、加权最小二乘滤波、β α-滤波和卡尔曼滤波,其中卡尔曼滤波算法在目标跟踪理论中占据了主导地位。
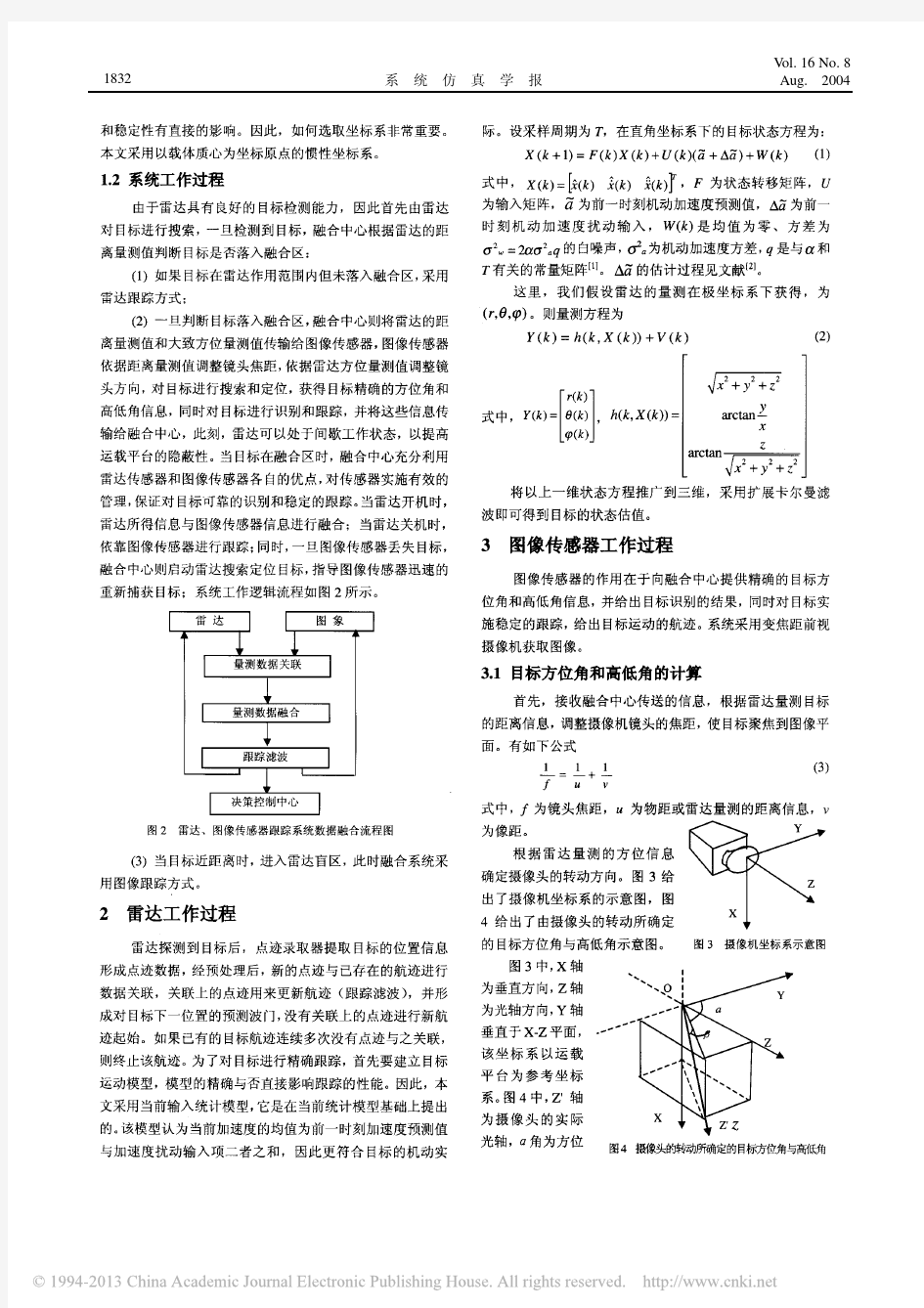
动态视频目标检测和跟踪技术 传统电视监控技术只能达到“千里眼”的作用,把远程的目标图像(原始数据)传送到监控中心,由监控人员根据目视到的视频图像对现场情况做出判断。智能化视频监控的目的是将视频原始数据转化为足够量的可供监控人员决策的“有用信息”,让监控人员及时全面地了解所发生的事件:“什么地方”,“什么时间”,“什么人”,“在做什么”。将“原始数据”转化为“有用信息”的技术中,目标检测与跟踪技术的目的是要解决“什么地方”和“什么时间”的问题。目标识别主要解决“什么人”或“什么东西”的问题。行为模式分析主要解决“在做什么”的问题。动态视频目标检测技术是智能化视频分析的基础。 本文将目前几种常用的动态视频目标检测方法简介如下: 背景减除背景减除(Background Subtraction)方法是目前运动检测中最常用的一种方法,它是利用当前图像与背景图像的差分来检测出运动目标的一种技术。它一般能够提供相对来说比较全面的运动目标的特征数据,但对于动态场景的变化,如光线照射情况和外来无关事件的干扰等也特别敏感。实际上,背景的建模是背景减除方法的技术关键。最简单的背景模型是时间平均图像,即利用同一场景在一个时段的平均图像作为该场景的背景模型。由于该模型是固定的,一旦建立之后,对于该场景图像所发生的任何变化都比较敏感,比如阳光照射方向,影子,树叶随风摇动等。大部分的研究人员目前都致力于开发更加实用的背景模型,以期减少动态场景变化对于运动目标检测效果的影响。 时间差分时间差分(Temporal Difference 又称相邻帧差)方法充分利用了视频图像的特征,从连续得到的视频流中提取所需要的动态目标信息。在一般情况下采集的视频图像,若仔细对比相邻两帧,可以发现其中大部分的背景像素均保持不变。只有在有前景移动目标的部分相邻帧的像素差异比较大。时间差分方法就是利用相邻帧图像的相减来提取出前景移动目标的信息的。让我们来考虑安装固定摄像头所获取的视频。我们介绍利用连续的图像序列中两个或三个相邻帧之间的时间差分,并且用阈值来提取出视频图像中的运动目标的方法。我们采用三帧差分的方法,即当某一个像素在连续三帧视频图像上均有相
基于多模态数据融合的视觉目标跟踪算法研究计算机科学技术的高速发展带动了计算机视觉领域的革新,人类对机器学习和人工智能的需求日益增加,这使得视觉目标跟踪成为了当前研究的热门课题。在无人驾驶、安防、人机交互、导航和制导等民事和军事应用领域,视觉目标跟踪扮演着举足轻重的角色。 经过了几十年的发展,当前的目标跟踪算法依然面临着来自外部环境和目标自身的具有挑战性的干扰因素,如背景杂乱、遮挡、低照度、尺度变化、形变、运动模糊和快速运动等,它们严重制约着其发展。本文通过研究不同模态的数据之间的互补特性,结合不同跟踪方法的优缺点分析,提出了一种基于“检测跟踪模型”的多模态数据融合跟踪算法。 该算法采用红外和可见光图像中目标的全局/局部的多种特征,能够应对当前目标跟踪领域所面临的多种复杂干扰。首先,本文算法设计了两个跟踪模块:基于统计模型的跟踪模块(HIST模块)和基于相关滤波的跟踪模块(CFT模块)。 其中,HIST模块采用具有全局统计特性的RGB颜色直方图作为跟踪特征,结合贝叶斯准则设计了一种目标/背景区分算子用于区分目标和干扰物,是一种生成式和判别式的混合跟踪模块。该模块引入了积分图策略,以实现基于检测跟踪模型的改进,得到可与CFT模块的跟踪结果相融合的改进模块。 而CFT模块基于KCF跟踪原理,采用了多种特征(HOG、CN、图像强度)进行跟踪任务,是一种判别式跟踪模型,本文基于检测跟踪模型对该模块进行了改进,并设计了一种去噪融合规则来融合由多种特征得到的响应函数。其次,本文基于KL 距离提出了一种可靠性度量规则来度量上述两个跟踪模块的输出结果的可靠性。 根据度量结果,本文还设计了一种决策级的自适应融合策略来融合上述跟踪
基于图像识别的目标跟踪系统 周立建1茅正冲2 (江南大学,江苏省无锡市 214122) 摘要:研究了在简单的背景下实现对图像的识别和跟踪。系统以ARM微处理器STM32为主控制器。在分析了驱 动电机和目标环境等因素的基础上,选择摄像头捕捉、采集图像并跟踪目标,通过合适的图像识别算法正确地处 理图像信息、识别目标。通过对水平和垂直驱动电机的控制,实现三维目标跟踪。能够实现系统对目标的大范围, 高精度的自动跟踪。 关键词:图像采集;图像信息处理;目标识别;目标跟踪 Target Tracking Based on Image Recognition System (IOT Engineering School of Jiangnan University,Wuxi Jiangsu Province ,214122) Abstract:Studied in the context of a simple implementation of image recognition and tracking. STM32 ARM microprocessor-based system controller. In the analysis of the drive motor and objectives on the basis of environmental factors, select the camera capture, image acquisition and target tracking, image recognition algorithm by an appropriate image processing information correctly, identify the target.Through horizontal and vertical drive motor control, to achieve three-dimensional tracking. System to achieve the target of large-scale, high-precision automatic tracking. Key words:Image acquisition;Image information processing;Target identification;Target tracking 1引言 图像处理技术的高速发展,相应地促进目标识别和跟踪技术的发展。尤其是在不同的环境下,如何实现目标识别和跟踪的稳定,具有很重要的理论价值和实际意义。 嵌入式平台集成度高,支持实时多任务操作系统,符合实时性和小型化的要求,同时克服了基于桌面pc机图像处理系统体积庞大,不具有实时特性等不足,可以面对日益复杂的应用。所以基于嵌入式平台的图像处理系统是未来图像处理系统的发展趋势。随着现代高速处理器的迅猛发展,图像处理技术也日益成熟。其中,移动目标的视频检测与跟踪是图像处理、分析应用的一个重要领域,是当前相关领域的研究前沿。移动目标视频检测与跟踪技术在诸多经济和军事领域有很广泛的应用,发挥重要的作用。 在最近二十几年间,随着计算机技术、VLSI技术和高分辨率传感器技术的迅速更新,图像识别方法已经有了更广泛的应用,如工业上的工业过程控制、自主运载器导航等等,尤其是它具有的许多突出的优点:可获得大量的目标信息(为其他形式的跟踪手段所无法相比)、抗电子干扰能力强、测量(角、面)精度高、保密性好、低空跟踪范围大、使用多种传感器(可见光、红外、微光等)、全天候工作能力强等。利用先进的数字图像处理技术去除许多自然及人为的干扰,加上预测等技术配合使用,可以实现记忆跟踪以及对瞬间丢失的目标再捕获。这种方法大量的运用在军事上的火控、导航、特别是制导方面。然而由于这一课题的发展历史较短而且内容又涉及到图像处理、模式识别和人工智能等多个新兴学科,其理论还很不完善,一些重要的问题尚未解决,新的方法和技巧还有待开发。因此进行有关图像目标识别与跟踪的研究无疑是一项既有理论意义又有实用价值的课题。 本文介绍了一种在简单背景下实现对图像目标的捕捉与跟踪。本系统设计应用了以ARM微处理器STM32为主控制器的嵌入式系统,使用OV7670图像处理器,尽可能达到了实时性与可靠性的要求。系统的工作流程如图1:
图像定位及跟踪技术大解析 在科学技术日新月异的今天,人们对机器设备的智能性、自主性要求也越来越高,希望其完全替代人的角色,把人们从繁重、危险的工作任务中解脱出来,而能否像人一样具有感知周围环境的能力已成为设备实现智能化自主化的关键。 广义的“图像跟踪”技术,是指通过某种方式(如图像识别、红外、超声波等)将摄像头中拍摄到的物体进行定位,并指挥摄像头对该物体进行跟踪,让该物体一直被保持在摄像头视野范围内。狭义的“图像跟踪”技术就是我们日常所常谈到的,通过“图像识别”的方式来进行跟踪和拍摄。 因为红外、超声波等方式,都受环境的影响,而且要专门的识别辅助设备,在实际应用中已经逐步被“图像识别”技术所替代。“图像识别”是直接利用了摄像头拍摄到的图像,进行NCAST图像差分及聚类运算,识别到目标物体的位置,并指挥摄像头对该物体进行跟踪。 图像跟踪系统采用特有的NCAST目标外形特征检测方法,被跟踪者无需任何辅助设备,只要进入跟踪区域,系统便可对目标进行锁定跟踪,使摄像机画面以锁定的目标为中心,并控制摄像机进行相应策略的缩放。系统支持多种自定义策略,支持多级特写模式,适应性强,不受强光、声音、电磁等环境影响。 目标物体的边缘检测 物体的形状特征在大多数情况下变化不多,基于目标形状轮廓的跟踪方法与基于区域的匹配方法相比,可以更精确的分割目标。 边缘是运动目标的最基本特征,表现在图像中就是指目标周围图像灰度有阶跃变化或屋顶变化的那些像素集合,它是图像中局部亮度变化最显著的部分。 边缘检测就是采用某种算法来定位灰度不连续变化的位置,从而图像中目标与背景的交界线。图像的灰度变化可以用灰度梯度来表示。
目标跟踪信息融合及仿真程序 质心算法是最简单的定位算法,如图2-1所示,四个小圆为观测站,实线三角形是目标真实的位置,假设四个圆形观测站都探测到目标的存在,则根据质心定位算法,目标的位置(x,y )可以表示为:4 4 321x x x x x +++= , 4 4 321y y y y y +++= ,这里观测站得位置为),(i i y x ,同理,当观测站数目为N 时,这时候的质心定位算法可以表示为: ???? ? ? ??????=??????∑∑==N i i N i i y N x N y x 11 11 图1 质心定位 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % 质心定位算法Matlab 程序 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function main % 定位初始化 Length=100; % 场地空间,单位:米 Width=100; % 场地空间,单位:米 d=50; % 目标离观测站50米以内都能探测到,反之则不能 Node_number=6; % 观测站的个数 for i=1:Node_number % 观测站的位置初始化,这里位置是随机给定的 Node(i).x=Width*rand; Node(i).y=Length*rand; end % 目标的真实位置,这里也随机给定 Target.x=Width*rand; Target.y=Length*rand; % 观测站探测目标 X=[]; for i=1:Node_number
1 绪论 1.1 课题背景及目的 目标跟踪问题实际上就是目标状态的跟踪滤波问题,即根据传感器已获得的目标量测数据对目标状态进行精确的估计[1]。它是军事和民用领域中一个基本问题,可靠而精确地跟踪目标是目标跟踪系统设计的主要目的。在国防领域,目标跟踪可用于反弹道导弹的防御、空防预警、战场区域监视、精确制导和低空突防等。在民用领域,则用于航空和地面交通管制、机器人的道路规划和障碍躲避、无人驾驶车的跟踪行驶、电子医学等。作为科学技术发展的一个方面,目标跟踪问题可以追溯到第二次世界大战的前夕,即1937年世界上出现第一部跟踪雷达站SCR-28的时候。之后,许多科学家和工程师一直努力于该项课题的研究,各种雷达、红外、声纳和激光等目标跟踪系统相继得到发展并且日趋完善。 运动目标的机动会使跟踪系统的性能恶化,对机动目标进行跟踪是人们多年来一直关注的问题。随着现代航空航天技术的飞速发展,机动目标在空间飞行的速度、角度、加速度等参数不断变化,使得目标的位置具有很强的相关性,因此,提高对这类目标的跟踪性能便成为越来越重要的问题,迫切需要研究更为优越的跟踪滤波方法。机动目标的跟踪研究,已成为当今电子战的研究热点之一。今天,精密跟踪雷达不仅广泛应用于各类武器控制和各类实验靶场,而且还广泛应用于各种空间探测、跟踪和识别领域,以及最先进的武器控制系统。 跟踪模型和匹配滤波是机动目标跟踪的两个关键部分,机动目标的精确跟踪在过去和现在都是一个难题,最根本原因在于跟踪滤波采用的目标动力学模型和机动目标实际动力学模型不匹配,导致跟踪滤波器发散,跟踪性能严重下降。本文将机动目标作为研究对象,从目标的运动建模和匹配滤波算法入手,提出或修正跟踪算法,从而实现对机动目标的精确跟踪。 1.2 机动目标跟踪技术及其发展状况 目标机动是指运动当中的目标,其运动方式在不断地发生变化,从一种形式变化为另一种形式,目标的运动可能从匀速到变速,也可能送直线到转弯,它的运动方式并不会从一而终。通俗地说,就是“目标速度的大小和方向发生变化”。 一般情况下,机动目标跟踪方法概括来讲可以分为以下两类:具有机动检测的跟踪算法和无需机动检测的自适应跟踪算法。机动目标的跟踪需要综合运用统计决策、滤波
1、课题来源 随着计算机技术的高速发展,运动物体的检测和跟踪在图像处理、计算机视觉、模式识别、人工智能、多媒体技术等领域越来越受到人们的关注。运动跟踪和检测的应用广泛,在智能监控和人机交互中,如:银行、交通、超市等场合常常使用运动跟踪分析技术,通过定位物体并对其行为进行分析,一旦发现物体有异常行为,监控系统就发出警报,提醒人们注意并即时的处理,改善了人工监督注意力分散、反应时间较慢、人力资源浪费等问题。运动目标的跟踪在虚拟现实、工业控制、军事设备、医学研究、视频监控、交通流量观测监控等很多领域也有重要的实用价值。特别在军事上,先进的武器导航、军事侦察和监控中都成功运用了自动跟踪技术。而跟踪的难点在于如何快速而准确的在每一帧图像中实现目标定位。正因如此,对运动目标的跟踪和检测的研究很有价值。 2、研究目的和意义 运动目标检测是图像处理与计算机视觉的一个分支,在理论和实践上都有重大意义,长久以来一直被国内外学者所关注。在实际中,视频监控利用摄像机对某一特定区域进行监视,是一个细致和连续的过程,它可以由人来完成,但是人执行这种长期枯燥的例行监测是不可靠,而且费用也很高,因此引入运动监测非常有必要。它可以减轻人的负担,并且提高了可靠性。概括起来运动监测主要包括三个内容:运动目标检测,方向判断和图像跟踪。运动目标检测是整个监测过程的基础,运动目标的提取准确与否,直接关系到后续高级过程的完成质量。3、国内外研究现状和发展趋势及综述 运动目标检测在国外已经取得了一些的研究成果,许多相关技术已经开始应用到实际系统中,但是国内研究相对落后,与国外还有较大差距。传统的视频目标提取大致可以分两类,一类以空间同性为准则,先用形态学滤波器或其他滤波器对图像作预处理;然后对该图像的亮度、色度或其他信息作空间上的分割以对区域作边缘检测;之后作运动估计,并合并相似的运动区域以得到最终的提取结果。如光流算法、主动轮廓模型算法。此类方法结果较为准确但是运算量相对较大。另一类算法主要以时间变化检测作为准则,这类算法主要通过帧差检测图像上的变化区域和不变区域,将运动物体与静止背景进行分割。此类方法运算量小,提取结果不如前类方法准确。此外,还有时空结合方法、时空亮度梯度信息结合的方法等等。 4、研究方法
信息融合技术 1引言 融合(Fusion)的概念开始出现于70年代初期,当时称之为多源相关、多源合成、多传感器混合或数据融合(Data Fusion),现在多称之为信息融合(Information Fusion)或数据融合。 融合就是指采集并集成各种信息源、多媒体与多格式信息,从而生成完整、准确、及时与有效的综合信息过程。数据融合技术结合多传感器的数据与辅助数据库的相关信息以 获得比单个传感器更精确、更明确的推理结果。经过融合的多传感器信息具有以下特征:信息的冗余性、互补性、协同性、实时性以及低成本性。 多传感器信息融合与经典信号处理方法之间存在本质 的区别,其关键在于信息融合所处理的多传感器信息具有更 为复杂的形式,而且可以在不同的信息层次上出现。 2信息融合的结构模型 由于信息融合研究内容的广泛性与多样性,目前还没有 统一的关于融合过程的分类。 2、1按照信息表征层次的分类系统的信息融合相对于信息表征的层次相应分为三类:数据层融合、特征层融合与决策层融合。 数据层融合通常用于多源图像复合、图像分折与理解等方面,采用经典的检测与估计方法。特征层融合可划分为两大
类:一类就是目标状态信息融合,目标跟踪领域的大体方法都可以修改为多传感器目标跟踪方法;另一类就是目标特性融合,它实质上就是模式识别问题,具体的融合方法仍就是模式识别的相应技术。 决策层融合就是指不同类型的传感器观测同一个目标,每个传感器在本地完成处理,其中包括顶处理、特征抽取、识别或判决,以建立对所观察目标的初步结论。然后通过关联处理、决策层触合判决,最终获得联合推断结果。 2、2JDL模型(Joint Directors of Laboratories, JDL)与λ-JDL模型该模型将融合过程分为四个阶段:信源处理,第一层处理(即目标提取)、第二层处理(即态势提取)、第三层提取(即威胁提取)与第四层提取(即过程提取)。模型中的每一个模块都可以有层次地进一步分割,并且可以采用不同的方法来实现它们。 λ-JDL模型为JDL模型的简化,把0层包含进了1层, 4层融入其她各层中。 2、3按照数据流融合的位置进行分类多传感器融合系统中的一个关键问题就是在何处对数据流进行融合。按照融合位置的不同可以将融合结构分为以下三种类型:集中式融合、分布式多传感器融合与无中心融合结构。对于特定的信息融合应用不可能找到一种最优的融合结构,结构的选择必须综合考虑计算资源、可用的通信带宽、精度要求、传感器能力
图像目标跟踪技术 ?作者:王鑫,徐立中著 ?出版社:人民邮电出版社 ?出版时间:2012-12-1 ?版次:1页数:178字数:221000 ?印刷时间:2012-12-1开本:16开纸张:胶版纸 ?印次:1I S B N:9787115288974包装:平装 内容推荐 《图像目标跟踪技术》系统阐述了图像目标跟踪的有关概念、原理和方法,共分9章,第1章介绍图像目标跟踪的意义、应用及分类,第2章介绍非线性优化序贯拟蒙特卡洛滤波,第3章介绍融合背景信息的序贯拟蒙特卡洛滤波目标跟踪,第4章讨论基于概率图模型的粒子滤波多目标跟踪,第5章介绍基于序贯拟蒙特卡洛滤波的多摄像机目标跟踪,第6章介绍基于信息融合技术的目标跟踪,第7章讨论受机械参数影响的多摄像机深度估计,第8章介绍基于自适应多信息融合的均值漂移红外目标跟踪,第9章介绍融合均值漂移和粒子滤波优点的实时目标跟踪。本书是图像目标跟踪方面的专著,反映作者近年来在这一领域的主要研究成果。《图像目标跟踪技术》内容新颖,理论联系实际,可作为大专院校及科研院所图像处理、计算机视觉和视频处理等领域的高年级本科生、研究生的教学和参考用书,也可供相关领域的教师、科研人员及工程技术人员作参考。 目录 第1章绪论 1.1 图像目标跟踪的意义和应用 1.2 单摄像机目标跟踪 1.2.1 目标表示模型 1.2.2 目标动态模型 1.2.3 目标状态估计模型 1.3 多摄像机目标跟踪 1.3.1 目标匹配 1.3.2 摄像机标定及拓扑关系估计 1.3.3 数据关联 1.4 红外图像中目标的跟踪 1.5 智能视频监控系统 1.5.1 智能视频监控的背景和意义 1.5.2 智能视频监控系统 参考文献 第2章非线性优化序贯拟蒙特卡洛滤波 2.1 引言 2.2 基于贝叶斯框架的跟踪问题描述 2.2.1 贝叶斯滤波的蒙特卡洛实现 2.2.2 贝叶斯滤波的拟蒙特卡洛实现 2.3 非线性优化序贯拟蒙特卡洛滤波 2.3.1 信赖域方法 2.3.2 基于信赖域的序贯拟蒙特卡洛滤波算法 2.4 实验与分析 2.4.1 非线性动态模型 2.4.2 二维点目标跟踪中的应用
“数字图像处理与目标跟踪技术”论文 [摘要]图像是一种重要的信息源,通过图像处理可以帮助人们了解信息的内涵。数字图像噪声去除涉及光学系统、微电子技术、计算机科学、数学分析等领域,是一门综合性很强的边缘科学,如今其理论体系已十分完善,且其实践应用很广泛,在医学、军事、艺术、农业等都有广泛且成熟的应用。本文概述了小波阈值去噪的基本原理。对常用的几种阈值去噪方法进行了分析比较和仿真实现。最后结合理论分析和实验结果,讨论了一个完整去噪算法中影响去噪性能的各种因素。为实际的图像处理中,小波阈值去噪法的选择和改进提供了数据参考和依据。 [关键字]:小波变换图像去噪阈值 [引言] 图像在生成和传输过程中常常因受到各种噪声的干扰和影响而使图像降质,这对后续图像的处理(如分割、压缩和图像理解等)将产生不利影响。噪声种类很多,如:电噪声、机械噪声、信道噪声和其他噪声。在图像处理中,图像去噪是一个永恒的主题,为了抑制噪声,改善图像质量,便于更高层次的处理,必须对图像进行去噪预处理。 计算机图像处理主要采取两大类方法:一是在空间域中的处理,即在图像空间中对图像进行各种处理;另一类是把空间域中的图像经过正交变换到频域,在频域里进行各种处理然后反变换到空间域,形成处理后的图像。人们也根据实际图像的特点、噪声的统计特征和频谱分布的规律,发展了各式各样的去噪方法。其中最为直观的方法,是根据噪声能量一般集中于高频而图像频谱则分布于一个有限区间的这一特点,采用低通滤波方式来进行去噪,或对图像进行平滑处理等,这属于第一类图像处理方法。还有就是在频域进行处理,如:傅立叶变换、小波基变换。 近年来,小波理论得到了非常迅速的发展,而且由于其具备良好的时频特性,实际应用也非常广泛。其中图像的小波阈值去噪方法可以说是众多图像去噪方法的佼佼者。基本思想就是利用图像小波分解后,各个子带图像的不同特性选取不同的阈值,从而达到较好的去噪目的。而且,小波变换本身是一种线形变换,而国内外的研究大多集中在如何选取一个合适的全局阈值,通过处理低于该阈值的小波系数同时保持其余小波系数值不变的方法来降噪,因而大多数方法对于类似于高斯噪声的效果较好,但对于混有脉冲噪声的混合噪声的情形处理效果并不理想。线形运算往往还会造成边缘模糊,小波分析技术正因其独特的时频局部化特性在图像信号和噪声信号的区分以及有效去除噪声并保留有用信息等方面较之传统的去噪具有明显的优势,且在去噪的同时实现了图像一定程度的压缩和边缘特征的提取。所以小波去噪具有无可比拟的优越性。小波去噪主要优点有: 低熵性,小波系数的稀疏分布,使得图象变换后的熵降低; 多分辨率,由于采用了多分辨率的方法,所以可以非常好地刻画信号的非平稳特征,如边缘、尖峰、断点等; 去相关性,因为小波变换可以对信号进行去相关,且噪声在变换后有白化趋势,所以小波域比时域更利于去噪; 选基灵活性,由于小波变换可以灵活选择变换基,从而对不同应用场合、不同的研究对象,可以选用不同的小波函数,以获得最佳的效果。 [正文] 1、图像与噪声:
基于图像处理技术的红外小目标的检测与跟踪 王琛廖庆王亚慧 (电子科技大学,光电信息学院学院) 摘要:验证了一种基于红外小目标视频图像序列的跟踪算法,主要研究了基于形心计算的跟踪方法和基于kalman滤波器多帧数据关联方法的跟踪法。分别仿真验证,并从实现结果出发得出了两种算法的适用范围和各自存在的不足。 关键字:远红外小目标检测与跟踪 Detection and Tracking of Far - infrared Small Target Wang Chen Liao Qing Wang Yahui (University of Electronic Science and Technology of China) Abstract: Verify that a tracking Algorithm for Infrared small target based on video image sequence, the main study on tracking method based on centroid computation and multi - frame data association based on Kalman Filter Method for tracing method.Simulation, respectively, and proceeding from the implementation of the results reached the scope of the two algorithms and their insufficient. Key words: Far-infrared;Small targets; Detection and Tracking 0 引言 随着近十几年信息技术的飞速发展,计算机硬件的处理能力不断提高,存储成本大幅下跌,一些研究人员开始重点研究计算机视觉中有关运动的问题。与处理单幅图像相比,图像序列引入了新的时间维以及时间相关性约束,这一额外的约束激发了人们对视频理解的研究.视频序列目标跟踪是指对传感器摄取到的图像序列进行处理与分析,一旦目标被确定,就可获得目标的特征参数选择。 。 由于视频跟踪具有广泛的应用范围,因而引起了世界范围内广大研究者的兴趣。 在1996年至1999年间,美国国防高级研究项目署(DARPA)资助卡内基梅隆大学、戴维SARNOFF研究中心等著名大学和公司合作,联合研制视频监视与监控系统VSAM,主要研究目的是开发用于战场及普通民用场景的自动视频理解技术。DARPA在2000年又资助了重大项目HID计划,其任务是开发多模式的监控技术以实现远距离情况下人的检测、分类
雷达机动目标跟踪技术 研究精编 Document number:WTT-LKK-GBB-08921-EIGG-22986
1 绪论 课题背景及目的 目标跟踪问题实际上就是目标状态的跟踪滤波问题,即根据传感器已获得的目标量测数据对目标状态进行精确的估计[1]。它是军事和民用领域中一个基本问题,可靠而精确地跟踪目标是目标跟踪系统设计的主要目的。在国防领域,目标跟踪可用于反弹道导弹的防御、空防预警、战场区域监视、精确制导和低空突防等。在民用领域,则用于航空和地面交通管制、机器人的道路规划和障碍躲避、无人驾驶车的跟踪行驶、电子医学等。作为科学技术发展的一个方面,目标跟踪问题可以追溯到第二次世界大战的前夕,即1937年世界上出现第一部跟踪雷达站SCR-28的时候。之后,许多科学家和工程师一直努力于该项课题的研究,各种雷达、红外、声纳和激光等目标跟踪系统相继得到发展并且日趋完善。 运动目标的机动会使跟踪系统的性能恶化,对机动目标进行跟踪是人们多年来一直关注的问题。随着现代航空航天技术的飞速发展,机动目标在空间飞行的速度、角度、加速度等参数不断变化,使得目标的位置具有很强的相关性,因此,提高对这类目标的跟踪性能便成为越来越重要的问题,迫切需要研究更为优越的跟踪滤波方法。机动目标的跟踪研究,已成为当今电子战的研
究热点之一。今天,精密跟踪雷达不仅广泛应用于各类武器控制和各类实验靶场,而且还广泛应用于各种空间探测、跟踪和识别领域,以及最先进的武器控制系统。 跟踪模型和匹配滤波是机动目标跟踪的两个关键部分,机动目标的精确跟踪在过去和现在都是一个难题,最根本原因在于跟踪滤波采用的目标动力学模型和机动目标实际动力学模型不匹配,导致跟踪滤波器发散,跟踪性能严重下降。本文将机动目标作为研究对象,从目标的运动建模和匹配滤波算法入手,提出或修正跟踪算法,从而实现对机动目标的精确跟踪。 机动目标跟踪技术及其发展状况 目标机动是指运动当中的目标,其运动方式在不断地发生变化,从一种形式变化为另一种形式,目标的运动可能从匀速到变速,也可能送直线到转弯,它的运动方式并不会从一而终。通俗地说,就是“目标速度的大小和方向发生变化”。 一般情况下,机动目标跟踪方法概括来讲可以分为以下两类:具有机动检测的跟踪算法和无需机动检测的自适应跟踪算法。机动目标的跟踪需要综合运用统计决策、滤波算法以及其它的数学方法,将传感器所接受到的信号数据进行处理,得到目标的位置、速度、加速度等估计信息。图给出了机动目标跟踪的基本原理图。
基于扩展卡尔曼滤波的雷达目标在线跟踪轨迹的算法摘要:目标跟踪是指根据传感器(如雷达等)所获得的对目标的测量信息,连续地对目标的运动状态进行估计,进而获取目标的运动态势及意图。目标跟踪理论在军、民用领域都有重要的应用价值。在军用领域,目标跟踪是情报搜集、战场监视、火力控制、态势估计和威胁评估的基础;在民用领域,目标跟踪被广泛应用于空中交通管制,目标导航以及机器人的道路规划等行业。本文利用差分方程模型计算目标点的速度与加速度,基于卡尔曼滤波算法建立扩展型卡尔曼滤波算法的目标跟踪模型。 0 引言 目前,对机动目标的跟踪滤波与预测算法主要有线性自回归滤波、两点外推滤波、维纳滤波、加权最小二乘滤波、与滤波、简化的卡尔曼滤波和卡尔曼滤波。线性自回归滤波完全忽视了状态噪声对估值的影响;两点外推滤波利用最后一个数据点和最后两个数据点分别确定目标位置与目标速度,因此,之前所测的数据点并不能起到预测作用;维纳滤波不适合机动目标的瞬间变化过程,从而在一定程度上限制了它的应用范围;与滤波是两种简单并且易于工程实现的常增益滤波方法,最大优点在于其增益矩阵可以离线计算,而且在每次滤波循环中可节约大约70%的计算量;卡尔曼滤波与预测执行的是均方根误差最小准则,并且通过协方差矩阵可以很方便的对估计精度进行度量,目前应用较多而且误差相对较小的目标跟踪算法是卡尔曼滤波算法。但基本的卡尔曼滤波算法在跟踪机动目标时存在不足:当系
统达到稳态时,其预测协方差很小,使得滤波器的增益也趋于极小值,此时若目标发生机动,系统残差增大,预测的协方差和滤波器的增益不能随残差随时改变,系统将不能保证对突变状态的跟踪能力。 1用扩展卡尔曼滤波算法预测机动目标轨迹 首先由目标初始准确的状态对下一状态进行预测,得到下一状态的预测值,同时由计算所得的对应于初始状态的协方差得到下一状态的协方差预测值;接着由雷达观测误差、状态向量及所得协方差预测值可以得到卡尔曼增益值,进而最终得到下一状态的最优估算值,同时更新对应的协方差。至此,第一轮目标轨迹预测已完成,同理,进行下一轮的目标轨迹预测。模型的具体方程如下:本时刻系统的状态向量由上一时刻系统的最优预测状态向量求得,初始状态需要知道目标的状态向量。这里通过差分方程数学模型计算出目标在三个坐标上速度变化情况: 其中、、表示所测数据第i时刻速度沿着方向三个的速度分量值。 然后使用卡尔曼滤波预测目标的运动轨迹,假定离散时间控制系统状态方程和观测方程为: 式中是k时刻的非线性实值状态向量,是k时刻的系统量测向量,表示系统状态噪声,表示系统测量噪声,A和B为状态向量,H为非线性函数。 由公式4和公式5构成的系统状态方程和测量方程均为线性方程,其过程噪声都为高斯白噪声,可用标准卡尔曼滤波算法进行滤波。
中南民族大学 毕业论文(设计) 学院:生物医学工程学院 专业:生物医学工程年级: 2008 题目: 基于图像处理的目标跟踪系统 学生姓名:熊章靖学号:08073103 指导教师姓名: 谢勤岚职称: 教授 2012年5月10日
中南民族大学本科毕业论文(设计)原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。本人完全意识到本声明的法律后果由本人承担。 作者签名: 2012年5月10日
目录 摘要 (1) Abstract (1) 1 引言 (2) 2 OpenCV的体系结构 (3) 2.1 OpenCV中的常用数据结构体系 (3) 2.2 OpenCV中常用类体系 (4) 2.3 OpenCV常用的函数 (4) 3视频处理 (7) 3.1用HighGUI对视频进行读写处理 (7) 3.1.1获取摄像头,显示图像 (7) 3.2对AVI文件的处理 (8) 4运动目标检测 (11) 4.1运动目标检测的基本方法 (11) 4.2本文的检测算法 (12) 4.3开运算和闭运算 (14) 5程序编辑及结果分析 (15) 5.1配置Visual C++ 6.0 (15) 5.1.1全局设置 (15) 5.1.2项目设置 (17) 5.2程序运行演示 (17) 5.3运行结果分析 (18) 结论 (19) 参考文献 (20) 致谢词 (21)
基于图像处理的目标跟踪系统 摘要:介绍了一种基于OpenCV的运动物体跟踪算法,用于实现在背景中检测出运动目标并实施警戒等特定提示的目的。该算法利用背景差分法得到当前帧中的静止的背景模型,并在不断更新的视频图像中检测前景图像,提取出运动目标。简单介绍了必要的函数和数据结构,以及重要的程序板块。实验结果表明,该方法可以较好地实现视频序列中运动目标的检测,具有实时性,并能得到较好的检测结果。相信在安防监督领域有更为广泛的运用。 关键字:运动目标检测;背景差分法;OpenCV The target tracking system based on image processing Abstract:It's introducing a kind of moving objects tracking algorithm based on OpenCV,which is used to realize the purpose of detection on moving objects in background and implementing of specific tips for warning.The algorithm gets the static background model in the current frame with the background-finite-difference method, and tests the foreground images in the constantly updated video images ,and extracts the moving targets from them, .In addition, it introduces the necessary functions,data structures and the important program plates. The results we get from the experiment shows that this method can well realize moving targets detection in video sequences, which are defined, and we can get a good test results from it with believing that this method will be more used of in the security supervision areas. Key Words:Moving targets detection;Frame difference;OpenCV
《图像检测、跟踪与识别技术》论文 论文题目: 图像检测、跟踪与识别技术与现代战争 专业:探测制导与控制技术 学号:35152129 姓名:刘孝孝
目标检测、跟踪与识别技术与现代战争 【摘要】本文讨论目标检测、跟踪与识别技术在现代战争各个领域中的应用,总结目标识别技术的发展方向,提出目标识别技术工程化实现方法,同时本文介绍了国外目标识别的现状及发展趋势,提出了现代战争应采用综合识别系统解决目标识别问题的建议。 关键词目标检测;目标跟踪;目标识别;雷达;人工神经网络;精确制导 1.引言 随着现代科学技术的飞速发展及其在军事领域内日益广泛的应用,传统的作战思想、作战方式已发生根本性的变化。从第一次海湾战争到科索沃战争,特别是刚刚结束的海湾战争,空中精确打击和空地一体化作战已经成为最重要的作战形式。集指挥、控制、通信、计算机、情报、监视侦察于一体的C ISR 已成为取得战场主动权,赢得最后胜利的关键因素。目标识别技术是雷达智能化、信息化的重要技术支撑手段。在现代化战争中,目标识别技术在预警探测、精确制导、战场指挥和侦察、敌我识别等军事领域都有广泛的应用前景,已受到了世界各国的关注。 现代战争中取得战场制信息权的关键之一是目标属性识别。现代战争的作战环境十分复杂,作战双方都在采用相应的伪装、隐蔽、欺骗和干扰等手段和技术,进行识别和反识别斗争。因此仅仅依靠一种或少数几种识别手段很难准确地进行目标识别,必须利用多个和多类传感器所收集到的多种目标属性信息,综合出准确的目标属性,进行目标检测,跟踪后进行识别。 2.目标检测、跟踪与识别技术在现代战争中的应用 2.1 目标检测、跟踪与识别技术在预警探测上的应用 目标检测、跟踪与识别技术对于弹道导弹的预警工作有重要的作用。弹道导弹一般携带多个弹头,其中可能包含核弹头或大规模杀伤的弹头以及常规弹头,预警雷达必须具备对目标进行分类和识别真假弹头的能力,将核弹头或大规模杀伤的弹头分离出来,为弹道导弹防御(BMD)系统进行目标攻击和火力分配提供依据。早期的BMD系统假设只有一个核弹头,多弹头分导技术的出现,使问题转化为雷达的多目标识别问题,加上电子对抗技术的广泛使用,给目标识别技术带来很大困难。另外,预警雷达还要对空中目标或低空目标进行探测,对来袭目标群进行分类识别。利用星载雷达以及远程光学望远镜等观测设备,可以对外空目标进行探测,对外空来袭目标进行分类和识别,达到早期预警的工作。 2.2 目标检测、跟踪与识别技术在精确制导上的应用 精确制导方式很多,包括主动式、半主动式和被动式寻的制导方式,通过设在精确制导武器
随机数字信号处理期末大作业(报告) 基于卡尔曼滤波器的雷达目标跟踪 Radar target tracking based on Kalman filter 学院(系):创新实验学院 专业:信息与通信工程 学生姓名:李润顺 学号:21424011 任课教师:殷福亮 完成日期:2015年7月14日 大连理工大学 Dalian University of Technology
摘要 雷达目标跟踪环节的性能直接决定雷达系统的安全效能。由于卡尔曼滤波器在状态估计与预测方面具有强大的性能,因此在目标跟踪领域有广泛应用,同时也是是现阶段雷达中最常用的跟踪算法。本文先介绍了雷达目标跟踪的应用背景以及研究现状,然后在介绍卡尔曼滤波算法和分析卡尔曼滤波器性能的基础上,将其应用于雷达目标跟踪,雷达在搜索到目标并记录目标的位置数据,对测量到的目标位置数据(称为点迹)进行处理,自动形成航迹,并对目标在下一时刻的位置进行预测。最后对在一个假设的情境给出基于卡尔曼滤波的雷达目标跟踪算法对单个目标航迹进行预测的MATLAB仿真,对实验的效果进行评估,分析预测误差。 关键词:卡尔曼滤波器;雷达目标跟踪;航迹预测;预测误差;MATLAB仿真
1 引言 1.1 研究背景及意义 雷达目标跟踪是整个雷达系统中一个非常关键的环节。跟踪的任务是通过相关和滤波处理建立目标的运动轨迹。雷达系统根据在建立目标轨迹过程中对目标运动状态所作的估计和预测,评估船舶航行的安全态势和机动试操船的安全效果。因此,雷达跟踪环节工作性能的优劣直接影响到雷达系统的安全效能[1]。 鉴于目标跟踪在增进雷达效能中的重要作用,各国在军用和民用等领域中一直非常重视发展这一雷达技术。机动目标跟踪理论有了很大的发展,尤其是在跟踪算法的研究上,理论更是日趋成熟。在跟踪算法中,主要有线性自回归滤波、两点外推滤波、维纳 α-滤波和卡尔曼滤波,其中卡尔曼滤波算法在目标跟踪滤波、加权最小二乘滤波、β 理论中占据了主导地位。 雷达跟踪需要处理的信息种类多种多样。除了目标的位置信息外,一般还要对目标运动速度进行估计,个别领域中的雷达还要对目标运动姿态进行跟踪。雷达跟踪的收敛速度、滤波精度和跟踪稳定度等是评估雷达跟踪性能的重要参数。因此提高雷达跟踪的精度、收敛速度和稳定度也就一直是改善雷达跟踪性能的重点。随着科技的发展,各类目标的运动性能和材质特征有了大幅度的改善和改变,这就要求雷达跟踪能力要适应目标特性的这种变化。在不断提高雷达跟踪性能的前提下,降低雷达跟踪系统的成本也是现代雷达必须考虑的问题。特别是在民用领域中由于雷达造价不能过高,对目标跟踪进行快收敛性、高精度和高稳定性的改良在硬件上是受到一些制约的,因此雷达跟踪算法的研究就越来越引起学者们的关注。通过跟踪算法的改进来提高雷达的跟踪性能还有相当大的挖掘潜力。考虑到雷达设备的造价,民用雷达的跟踪系统首要的方法就是对于雷达的跟踪算法进行开发。