目标跟踪信息融合及仿真程序
质心算法是最简单的定位算法,如图2-1所示,四个小圆为观测站,实线三角形是目标真实的位置,假设四个圆形观测站都探测到目标的存在,则根据质心定位算法,目标的位置(x,y )可以表示为:4
4
321x x x x x +++=
,
4
4
321y y y y y +++=
,这里观测站得位置为),(i i y x ,同理,当观测站数目为N
时,这时候的质心定位算法可以表示为:
????
?
?
??????=??????∑∑==N i i N i i y N x N y x 11
11
图1 质心定位
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 质心定位算法Matlab 程序
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function main % 定位初始化
Length=100; % 场地空间,单位:米 Width=100; % 场地空间,单位:米
d=50; % 目标离观测站50米以内都能探测到,反之则不能 Node_number=6; % 观测站的个数
for i=1:Node_number % 观测站的位置初始化,这里位置是随机给定的 Node(i).x=Width*rand; Node(i).y=Length*rand; end
% 目标的真实位置,这里也随机给定 Target.x=Width*rand; Target.y=Length*rand; % 观测站探测目标 X=[];
for i=1:Node_number
if DIST(Node(i),Target)<=d
X=[X;Node(i).x,Node(i).y];
end
end
N=size(X,1); % 探测到目标的观测站个数
Est_Target.x=sum(X(:,1))/N; % 目标估计位置x
Est_Target.y=sum(X(:,2))/N; % 目标估计位置y
Error_Dist=DIST(Est_Target,Target) % 目标真实位置与估计位置的偏差距离%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % 画图
figure
hold on;box on;axis([0 100 0 100]); % 输出图形的框架
for i=1:Node_number
h1=plot(Node(i).x,Node(i).y,'ko','MarkerFace','g','MarkerSize',10);
text(Node(i).x+2,Node(i).y,['Node ',num2str(i)]);
end
h2=plot(Target.x,Target.y,'k^','MarkerFace','b','MarkerSize',10);
h3=plot(Est_Target.x,Est_Target.y,'ks','MarkerFace','r','MarkerSize',10);
line([Target.x,Est_Target.x],[Target.y,Est_Target.y],'Color','k');
circle(Target.x,Target.y,d);
legend([h1,h2,h3],'Observation Station','Target Postion','Estimate Postion');
xlabel(['error=',num2str(Error_Dist),'m']); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % 子函数,计算两点间的距离
function dist=DIST(A,B)
dist=sqrt( (A.x-B.x)^2+(A.y-B.y)^2 );
% 子函数,以目标为中心画圆
function circle(x0,y0,r)
sita=0:pi/20:2*pi;
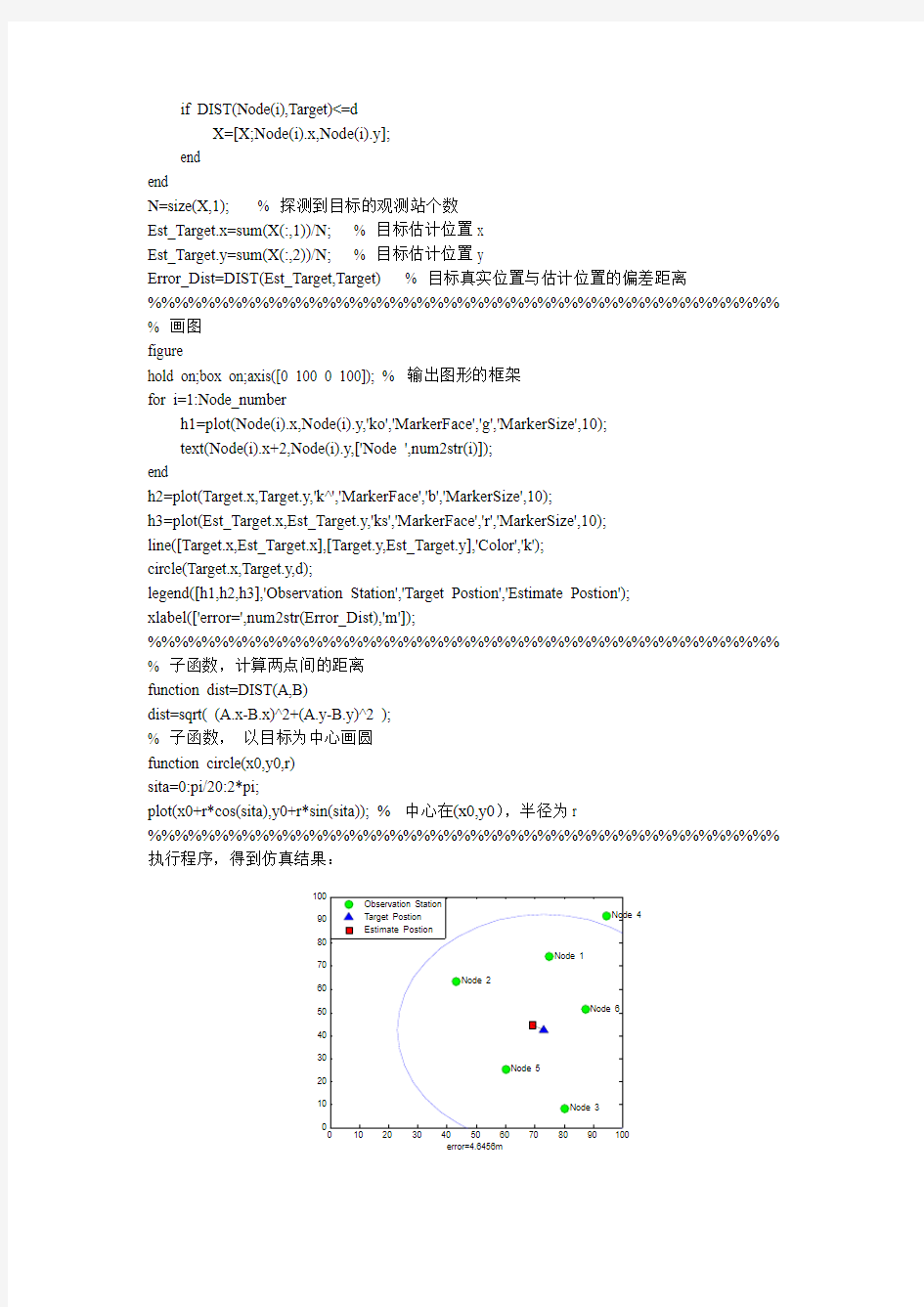
plot(x0+r*cos(sita),y0+r*sin(sita)); % 中心在(x0,y0),半径为r %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 执行程序,得到仿真结果:
error=4.6456m
更多目标定位跟踪算法和程序请参考以下书籍:
目录
第一章目标跟踪概述 1 1.1 多传感器探测的目标跟踪架构 1 1.2 目标定位算法简介 2 1.3 目标跟踪过程描述 2 1.4 跟踪模型的建立 4 第二章常用目标定位算法7 2.1 质心定位算法程序7 2.2 加权质心定位算法程序9 2.3 最小二乘/极大似然定位算法12 2.3.1 测距技术12 2.3.2 定位技术14 2.3.3最小均方误差的二维定位方法程序16 2.3.4 最小均方误差的三维定位方法程序17 2.3.5 最小二乘/极大似然用于目标跟踪(连续定位)程序19 2.3.6 最小二乘/极大似然用于纯方位目标跟踪(连续定位)程序22 第三章卡尔曼滤波24 3.1 Kalman滤波24 3.1.1 Kalman滤波原理24 3.1.2 Kalman滤波在目标跟踪中的应用及仿真程序26 3.2 扩展Kalman滤波(EKF)28 3.2.1 扩展Kalman滤波原理28 3.2.2 基于EKF的单站观测距离的目标跟踪程序29 3.2.3 基于EKF的单站纯方位目标跟踪程序32 3.3 无迹Kalman滤波(UKF)35 3.3.1 无迹Kalman滤波原理35 3.3.2 无迹卡尔曼在目标跟踪中的应用的仿真程序36 3.4 交互多模型Kalman滤波(IMM)40 3.4.1 交互多模原理40 3.4.1 交互多模kalman滤波在目标跟踪应用仿真程序47 第四章蒙特卡洛方法52
4.1 概念和定义52 4.2 蒙特卡洛模拟仿真程序53 4.2.1硬币投掷实验(1)53 4.2.2硬币投掷实验(2)53 4.2.3古典概率实验54 4.2.4几何概率模拟实验54 4.2.5复杂概率模拟实验55 4.3 蒙特卡洛理论基础57 4.3.1大数定律57 4.3.2中心极限定律58 4.3.3蒙特卡洛的要点59 4.4 蒙特卡洛方法的应用60 4.4.1 Buffon实验及仿真程序61 4.4.2 蒙特卡洛方法计算定积分的仿真程序62 第五章粒子滤波66
5.1 粒子滤波概述66 5.1.1 蒙特卡洛采样原理66 5.1.2 贝叶斯重要性采样67 5.1.3 序列重要性抽样(SIS)滤波器67 5.1.4 Bootstrap/SIR滤波器69 5.2 粒子滤波重采样方法实现程序71 5.2.1 随机重采样程序71 5.2.2 多项式重采样程序73 5.2.3 系统重采样程序74 5.2.4 残差重采样程序76 5.3 粒子滤波在目标跟踪中的应用77 5.3.1 高斯模型下粒子滤波的实例程序77 5.3.2 高斯噪声下粒子滤波用于目标跟踪的程序81 5.3.3 闪烁噪声下粒子滤波用于目标跟踪的程序85
本书说明:
该书的研究内容是目标跟踪的状态估计方法,主要有最小二乘估计,Kalman 滤波,扩展Kalman滤波,无迹Kalman滤波以及粒子滤波等,包括理论介绍和MATLAB源程序两部分。
全书构成:
一,讲述原理(原书截图)
二,Matlab程序给出详细中文注释
三,仿真结果
三维定位仿真结果图例
0102030405060708090100
纯方位目标跟踪轨迹
观测距离目标跟踪轨迹
四,结果分析
x方向估计误差均值
50100150200250300350400450
y方向估计误差均值
跟踪误差分析图例
如果你在研究中遇到原理或者编程的困难,欢迎交流,加入QQ:345194112。
本书网址:https://www.doczj.com/doc/8a5508745.html,/item.htm?id=131********
微波交通检测器应用方案——T-11 V5 多目标追踪雷达 江苏志德华通信息技术有限公司 编辑者:高志鹏
1.Tracteh T-11 V5多目标追踪微波车辆检测器简介 1.1功能概述 ●Tractech T-11 V5多目标追踪微波车辆检测器(以下简称T-11 V5),是利用二维主动扫描式阵列雷达 微波检测技术,对路面发射微波,以每秒20次的扫描频率可靠地检测路上每一车道的目标,准确区分机动力、非机动力、行人等,可同时识别及跟踪最多64个目标对象。 ●可同时测量每车道的流量、平均速度、占有率、85%位速率、车头时距、车间距等交通数据,以及排队 长度、逆行、超速、ETA等报警信息,并可准确地测量区域内每个目标的位置坐标(X,Y)与速度(Vx, Vy)。 ●能进行大区域检测,沿来车方向正常检测区域至少可达160米,能同时检测至少6个车道,其中中间的 4个车道每条车道可以有4个精确的检测点,4条车道就可以配置16个精确的检测点。每个检测点就是一条线,这条线与路交叉成90度夹角,也就是垂直于路的方向。这些垂直于路的方向的检测线,就可以作为雷达的检测点,可以非常精确检测车辆接近并经过这些检测点时的状态 ●自动检测交通流的运行方向,进行车辆逆行检测统计。 ●采用前向安装的方式,可方便地利用既有杆件:信号灯杆、电警杆横臂、任一标志标牌、路灯杆上,具 有安装维护方便,不破坏路面,不影响交通,技术先进,成本低等特点。 ●可在全天候环境下工作,外壳达到IP67防护标准,并具有自校准以及故障自诊断功能。 ●可视化的图形化操作界面能实时显示每个目标在检测区域内被跟踪情况以及车辆即时速度、车辆长度等 实时信息。 1.2应用场合 T-11 V5 是一款革命性的通用交通管理雷达,可以用在交通管理领域的很多方面: 公路和交通管理系统
基于多模态数据融合的视觉目标跟踪算法研究计算机科学技术的高速发展带动了计算机视觉领域的革新,人类对机器学习和人工智能的需求日益增加,这使得视觉目标跟踪成为了当前研究的热门课题。在无人驾驶、安防、人机交互、导航和制导等民事和军事应用领域,视觉目标跟踪扮演着举足轻重的角色。 经过了几十年的发展,当前的目标跟踪算法依然面临着来自外部环境和目标自身的具有挑战性的干扰因素,如背景杂乱、遮挡、低照度、尺度变化、形变、运动模糊和快速运动等,它们严重制约着其发展。本文通过研究不同模态的数据之间的互补特性,结合不同跟踪方法的优缺点分析,提出了一种基于“检测跟踪模型”的多模态数据融合跟踪算法。 该算法采用红外和可见光图像中目标的全局/局部的多种特征,能够应对当前目标跟踪领域所面临的多种复杂干扰。首先,本文算法设计了两个跟踪模块:基于统计模型的跟踪模块(HIST模块)和基于相关滤波的跟踪模块(CFT模块)。 其中,HIST模块采用具有全局统计特性的RGB颜色直方图作为跟踪特征,结合贝叶斯准则设计了一种目标/背景区分算子用于区分目标和干扰物,是一种生成式和判别式的混合跟踪模块。该模块引入了积分图策略,以实现基于检测跟踪模型的改进,得到可与CFT模块的跟踪结果相融合的改进模块。 而CFT模块基于KCF跟踪原理,采用了多种特征(HOG、CN、图像强度)进行跟踪任务,是一种判别式跟踪模型,本文基于检测跟踪模型对该模块进行了改进,并设计了一种去噪融合规则来融合由多种特征得到的响应函数。其次,本文基于KL 距离提出了一种可靠性度量规则来度量上述两个跟踪模块的输出结果的可靠性。 根据度量结果,本文还设计了一种决策级的自适应融合策略来融合上述跟踪
华中科技大学 硕士学位论文 多摄像头目标检测与跟踪方法研究 姓名:颜杰 申请学位级别:硕士 专业:通信与信息系统 指导教师:邱锦波 2011-01-18
华中科技大学硕士学位论文 摘要 视频跟踪是计算机视觉领域的一个基础的研究课题,也一个非常具有挑战性的研究方向。在当前的现实生活中,视频跟踪技术已经在各种领域内得到了广泛的应用,其中包括视频监控、军事工程、交通管理、智能机器人和人机交互等,具有很高的学术研究和应用价值。 单摄像头的视频跟踪系统存在很多无法解决的问题,其中包括目标遮挡、摄像头视野有限、不能进行全方位的跟踪等问题,而多摄像头的跟踪系统能够很好的克服这些问题。因此,多摄像头目标检测与跟踪正在成为研究的热点。本文在前人研究的基础上,重点研究了如何提高多摄像头之间目标确认的精度,以及如何在保证对目标准确跟踪的条件下,降低整个系统的数据传输量和计算量。 本文首先分析多摄像头跟踪领域中,摄像头之间目标确认问题,提出了一种在基于平面单应性的确认技术中,引入目标距离特征的新方法。由于目标距离不受平面单应性约束条件的影响,加入目标距离特征能有效的提高摄像头之间目标的确认精度。实验结果表明,在基于平面单应性的确认算法中,增加目标距离特征后,确认精度得到了一定的提高。 为了有效地减少多摄像头跟踪系统的数据传输量和计算量,本文还提出了一种基于最优摄像头选择的跟踪算法,并从理论分析和实验上,对该算法的性能进行了评估。实验结果显示,该算法在不降低对目标跟踪准确度的情况下,有效地降低整个系统的数据传输量和计算量。 关键词:多摄像头,目标检测,目标跟踪,目标确认,最优摄像头选择
博聪多目标智能跟踪系统 产品组成 注:因产品更新较快,产品图片仅供参考,实际产品外观请在购买前与销售人员确认。 系统概述 博聪多目标智能跟踪系统系列产品,由广角摄像机、高速跟踪球机、多目标智能跟踪处理器和一体化支架组成,是厦门博聪信息技术有限公司自主研发的新一代智能监控产品。 其采用了国内先进的 高速跟踪球机 [20x 光学放大倍数] 广角摄像机 [全景视频采集设备] 一体化支架 多目标智能跟踪处理器 [多目标智能跟踪算法程序]
图像检测、识别和跟踪技术,通过先进的视频分析算法和多目标跟踪算法程序,配合精密、精准的云镜控制系统,实现对全景区域内多个移动目标或选定目标的自动、快速、精准、连续、流畅的跟踪和捕捉;并同步完成对全景区域的监控需要,实现对高等级要求的安保需求。 传统球机通过预置位巡航转动,对于视野内的移动目标拍摄效率很低,而且拍摄的很多内容都是无效的静止物体,实际利用率不高。博聪多目标智能跟踪系统采用了广角摄像机与高速跟踪球机搭配的摄像机组合方式,结合国际领先的复杂环境运动物体检测技术和多目标跟踪技术,可同时锁定广角摄像机画面内多个移动目标,多目标智能跟踪处理器驱动高速跟踪球机锁定移动目标并对其进行自动跟踪、放大以得到更清晰的目标特征。这样既有反映目标移动轨迹的监控大场景全局画面,又保留具有监控价值的运动目标局部清晰特写画面,使得监控画面的效用极大提高。 博聪多目标智能跟踪系统支持鼠标点控的球机操作方式,使球机控制操作更简单、更迅捷,降低用户与球机交互过程中的成本,给用户带来持续的、良好的人机交互体验,为人工干预球机及时看清感兴趣目标提供了非常便捷的工具。 功能特点 1.多目标自动跟踪特写拍摄(无人值守) 多目标自动跟踪特写拍摄功能可自动锁定警戒区内多个移动目标,并结合博聪独有的专利技术控制高速跟踪球机平滑跟踪各个运动目标,获得清晰特写画面,自动监控闯入警戒区的每个目标。很好地解决了传统球机没有人工干预时形如摆设的问题,并且有效利用起存储设备,只将关键有用信息抓拍存储,减轻了事后取证的难度。高速跟踪球机抓拍细节,同步广角摄像机监控大范围场景,实现“点面结合、动静兼顾”。
目标跟踪信息融合及仿真程序 质心算法是最简单的定位算法,如图2-1所示,四个小圆为观测站,实线三角形是目标真实的位置,假设四个圆形观测站都探测到目标的存在,则根据质心定位算法,目标的位置(x,y )可以表示为:4 4 321x x x x x +++= , 4 4 321y y y y y +++= ,这里观测站得位置为),(i i y x ,同理,当观测站数目为N 时,这时候的质心定位算法可以表示为: ???? ? ? ??????=??????∑∑==N i i N i i y N x N y x 11 11 图1 质心定位 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % 质心定位算法Matlab 程序 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function main % 定位初始化 Length=100; % 场地空间,单位:米 Width=100; % 场地空间,单位:米 d=50; % 目标离观测站50米以内都能探测到,反之则不能 Node_number=6; % 观测站的个数 for i=1:Node_number % 观测站的位置初始化,这里位置是随机给定的 Node(i).x=Width*rand; Node(i).y=Length*rand; end % 目标的真实位置,这里也随机给定 Target.x=Width*rand; Target.y=Length*rand; % 观测站探测目标 X=[]; for i=1:Node_number
第九章图像目标探测与跟踪技术 主讲人:赵丹培 宇航学院图像处理中心 zhaodanpei@https://www.doczj.com/doc/8a5508745.html, 电话:82339972
目录 9.1 概论 9.2 目标检测与跟踪技术的发展现状9.3 目标检测与跟踪技术的典型应用9.4 图像的特征与描述 9.5 目标检测方法的基本概念与原理9.6 目标跟踪方法涉及的基本问题
9.1 概论 1、课程的学习目的 学习和掌握目标探测、跟踪与识别的基本概念和术语,了解一个完整信息处理系统的工作流程,了解目标探测、跟踪与识别在武器系统、航空航天、军事领域的典型应用。了解目标检测、跟踪与识别涉及的关键技术的发展现状,为今后从事相关的研究工作奠定基础。 2、主要参考书: 《目标探测与识别》,周立伟等编著,北京理工大学出版社; 《成像自动目标识别》,张天序著,湖北科学技术出版社; 《动态图像分析》,李智勇沈振康等著,国防工业出版社;
引言:学习目标检测与跟踪技术的意义 ?现代军事理论认为,掌握高科技将成为现代战争取胜的重要因素。以侦察监视技术、通信技术、成像跟踪技术、精确制导技术等为代表的军用高科技技术是夺取胜利的重要武器。 ?成像跟踪技术是为了在战争中更精确、及时地识别敌方目标,有效地跟踪目标,是高科技武器系统中的至关重要的核心技术。 ?例如:一个完整的军事战斗任务大致包括侦察、搜索、监视以及攻击目标和毁伤目标。那么快速的信息获取和处理能力就是战争胜利的关键,因此,目标的实时探测、跟踪与识别也成为必要的前提条件。
?随着现代高新技术的不断发展及其在军事应用领域中的日益推广,传统的作战形态正在发生着深刻的变化。 1973年的第四次中东战争,1982年的英阿马岛之战,1991年的海湾战争及1999年的科索沃战争,伊拉克战争等都说明了这一点。西方各军事强国都在积极探索对抗武器,特别是美国更是投入了巨大的物力、人力和财力积极研制弹道导弹防御系统。而图像检测、跟踪和识别算法作为现代战场信息环境作战成败的关键,具备抗遮挡、抗丢失和抗机动鲁棒性的智能跟踪器,将是现代战场作战必备品,具有广泛的应用前景。
目标检测、跟踪与识别技术与现代战争 【摘要】本文讨论目标检测、跟踪与识别技术在现代战争各个领域中的应用,总结目标识别技术的发展方向,提出目标识别技术工程化实现方法,同时本文介绍了国外目标识别的现状及发展趋势,提出了现代战争应采用综合识别系统解决目标识别问题的建议。 关键词目标检测;目标跟踪;目标识别;雷达;人工神经网络;精确制导 1.引言 随着现代科学技术的飞速发展及其在军事领域内日益广泛的应用,传统的作战思想、作战方式已发生根本性的变化。从第一次海湾战争到科索沃战争,特别是刚刚结束的海湾战争,空中精确打击和空地一体化作战已经成为最重要的作战形式。集指挥、控制、通信、计算机、情报、监视侦察于一体的C ISR 已成为取得战场主动权,赢得最后胜利的关键因素。目标识别技术是雷达智能化、信息化的重要技术支撑手段。在现代化战争中,目标识别技术在预警探测、精确制导、战场指挥和侦察、敌我识别等军事领域都有广泛的应用前景,已受到了世界各国的关注。 现代战争中取得战场制信息权的关键之一是目标属性识别。现代战争的作战环境十分复杂,作战双方都在采用相应的伪装、隐蔽、欺骗和干扰等手段和技术,进行识别和反识别斗争。因此仅仅依靠一种或少数几种识别手段很难准确地进行目标识别,必须利用多个和多类传感器所收集到的多种目标属性信息,综合出准确的目标属性,进行目标检测,跟踪后进行识别。 2.目标检测、跟踪与识别技术在现代战争中的应用 2.1 目标检测、跟踪与识别技术在预警探测上的应用 目标检测、跟踪与识别技术对于弹道导弹的预警工作有重要的作用。弹道导弹一般携带多个弹头,其中可能包含核弹头或大规模杀伤的弹头以及常规弹头,预警雷达必须具备对目标进行分类和识别真假弹头的能力,将核弹头或大规模杀伤的弹头分离出来,为弹道导弹防御(BMD)系统进行目标攻击和火力分配提供依据。早期的BMD系统假设只有一个核弹头,多弹头分导技术的出现,使问题转化为雷达的多目标识别问题,加上电子对抗技术的广泛使用,给目标识别技术带来很大困难。另外,预警雷达还要对空中目标或低空目标进行探测,对来袭目标群进行分类识别。利用星载雷达以及远程光学望远镜等观测设备,可以对外空目标进行探测,对外空来袭目标进行分类和识别,达到早期预警的工作。
xxx校园制高点监控系统 及多目标智能跟踪系统方案设计 北京xxx数码科技有限公司2015年12月7日
目录 1 校园监控目前存在的问题 1 2 解决方案 1 3 系统整体设计 1 3.1 普通制高点监控系统 1 3.1.1 优势 1 3.1.2 不足 1 3.2 多目标智能追踪系统 2 3.2.1 系统概述 2 3.2.2 平安校园中的应用 2 3.2.3 系统组成 3 3.2.4 系统优势 3 3.2.5 功能特点 3 3.2.6 多目标智能跟踪系统设备性能及参数 5 3.2.7 智能多目标系统管理软件平台8 3.2.8 平台对接9 4 清单配置9 4.1 方案一配置9 4.2 方案二配置9
校园监控目前存在的问题 各高职院校的校园大门口社会人员嘈杂,犯罪事件频发,使用普通的枪机或球机拍得不全和拍不清细节,无法真正实现对上下学期间大门口场所的有效监管。 操场面积大,使用普通的枪机球机都很难实现全覆盖、无死角。即使覆盖了大部分场景,离监控点远的位置也拍不到细节。一旦发生意外事件,虽然监控设备有拍摄到,但看不清细节,对于事后取证毫无作用。 解决方案 针对此问题,我公司提供如下两套设计方案以供校方结合具体实际情况采纳。 第一套方案:采用在校园至高点配置全景摄像机的方式实现学校法范围重点部位的精确监控。 第二套方案:采用至高点多目标智能跟踪系统对学校的校门、主要路口、操场、运动场等主要区域进行布控、对校园的重点部位和重点区域进行主动化、智能化的实时监控,以实现对校园重点区域和场所进行高安全级别的监控和管控。 系统整体设计 普通制高点监控系统 大范围、远距离、高清晰监控校园,尤其适合夜晚从高处俯视校园某处。 可以实时从高处远距离监视和控制监控点的图像,在有紧急事件发生和举行重要活动时或者夜间有危险警情出现时可以作为指挥调度的辅助手段,协助有关校领导和安保部门完成紧急事件处理。同时可根据实际情况实现对相应设备、安保人员和事件处理的控制。 优势 校园楼栋的制高点安装2套300万30倍光学变焦、支持H.265的高清全景球机,后端配置8路网络视频录像机进行存储,并通过校园保安监控中心进行视频输出图像显示,从而实现学校大范围的精确制高点监控。 此种方案设备配置的优点是成本低,安装相对简单,效果也比较良好。 不足 仅能实现简单的学校大范围的精确制高点监控。其他更多的报警联动、智能跟踪等功能无法实现。若想实现重点区域或重点目标的特点拍摄、入侵报警、绊线报警及动静兼顾并获得清晰的图像和动态的智能跟踪功能,需要采用方案二即:多目标智能追踪系统。
信息融合技术 1引言 融合(Fusion)的概念开始出现于70年代初期,当时称之为多源相关、多源合成、多传感器混合或数据融合(Data Fusion),现在多称之为信息融合(Information Fusion)或数据融合。 融合就是指采集并集成各种信息源、多媒体与多格式信息,从而生成完整、准确、及时与有效的综合信息过程。数据融合技术结合多传感器的数据与辅助数据库的相关信息以 获得比单个传感器更精确、更明确的推理结果。经过融合的多传感器信息具有以下特征:信息的冗余性、互补性、协同性、实时性以及低成本性。 多传感器信息融合与经典信号处理方法之间存在本质 的区别,其关键在于信息融合所处理的多传感器信息具有更 为复杂的形式,而且可以在不同的信息层次上出现。 2信息融合的结构模型 由于信息融合研究内容的广泛性与多样性,目前还没有 统一的关于融合过程的分类。 2、1按照信息表征层次的分类系统的信息融合相对于信息表征的层次相应分为三类:数据层融合、特征层融合与决策层融合。 数据层融合通常用于多源图像复合、图像分折与理解等方面,采用经典的检测与估计方法。特征层融合可划分为两大
类:一类就是目标状态信息融合,目标跟踪领域的大体方法都可以修改为多传感器目标跟踪方法;另一类就是目标特性融合,它实质上就是模式识别问题,具体的融合方法仍就是模式识别的相应技术。 决策层融合就是指不同类型的传感器观测同一个目标,每个传感器在本地完成处理,其中包括顶处理、特征抽取、识别或判决,以建立对所观察目标的初步结论。然后通过关联处理、决策层触合判决,最终获得联合推断结果。 2、2JDL模型(Joint Directors of Laboratories, JDL)与λ-JDL模型该模型将融合过程分为四个阶段:信源处理,第一层处理(即目标提取)、第二层处理(即态势提取)、第三层提取(即威胁提取)与第四层提取(即过程提取)。模型中的每一个模块都可以有层次地进一步分割,并且可以采用不同的方法来实现它们。 λ-JDL模型为JDL模型的简化,把0层包含进了1层, 4层融入其她各层中。 2、3按照数据流融合的位置进行分类多传感器融合系统中的一个关键问题就是在何处对数据流进行融合。按照融合位置的不同可以将融合结构分为以下三种类型:集中式融合、分布式多传感器融合与无中心融合结构。对于特定的信息融合应用不可能找到一种最优的融合结构,结构的选择必须综合考虑计算资源、可用的通信带宽、精度要求、传感器能力
《图像检测、跟踪与识别技术》论文 论文题目: 图像检测、跟踪与识别技术与现代战争 专业:探测制导与控制技术 学号:35152129 姓名:刘孝孝
目标检测、跟踪与识别技术与现代战争 【摘要】本文讨论目标检测、跟踪与识别技术在现代战争各个领域中的应用,总结目标识别技术的发展方向,提出目标识别技术工程化实现方法,同时本文介绍了国外目标识别的现状及发展趋势,提出了现代战争应采用综合识别系统解决目标识别问题的建议。 关键词目标检测;目标跟踪;目标识别;雷达;人工神经网络;精确制导 1.引言 随着现代科学技术的飞速发展及其在军事领域内日益广泛的应用,传统的作战思想、作战方式已发生根本性的变化。从第一次海湾战争到科索沃战争,特别是刚刚结束的海湾战争,空中精确打击和空地一体化作战已经成为最重要的作战形式。集指挥、控制、通信、计算机、情报、监视侦察于一体的C ISR 已成为取得战场主动权,赢得最后胜利的关键因素。目标识别技术是雷达智能化、信息化的重要技术支撑手段。在现代化战争中,目标识别技术在预警探测、精确制导、战场指挥和侦察、敌我识别等军事领域都有广泛的应用前景,已受到了世界各国的关注。 现代战争中取得战场制信息权的关键之一是目标属性识别。现代战争的作战环境十分复杂,作战双方都在采用相应的伪装、隐蔽、欺骗和干扰等手段和技术,进行识别和反识别斗争。因此仅仅依靠一种或少数几种识别手段很难准确地进行目标识别,必须利用多个和多类传感器所收集到的多种目标属性信息,综合出准确的目标属性,进行目标检测,跟踪后进行识别。 2.目标检测、跟踪与识别技术在现代战争中的应用 2.1 目标检测、跟踪与识别技术在预警探测上的应用 目标检测、跟踪与识别技术对于弹道导弹的预警工作有重要的作用。弹道导弹一般携带多个弹头,其中可能包含核弹头或大规模杀伤的弹头以及常规弹头,预警雷达必须具备对目标进行分类和识别真假弹头的能力,将核弹头或大规模杀伤的弹头分离出来,为弹道导弹防御(BMD)系统进行目标攻击和火力分配提供依据。早期的BMD系统假设只有一个核弹头,多弹头分导技术的出现,使问题转化为雷达的多目标识别问题,加上电子对抗技术的广泛使用,给目标识别技术带来很大困难。另外,预警雷达还要对空中目标或低空目标进行探测,对来袭目标群进行分类识别。利用星载雷达以及远程光学望远镜等观测设备,可以对外空目标进行探测,对外空来袭目标进行分类和识别,达到早期预警的工作。 2.2 目标检测、跟踪与识别技术在精确制导上的应用 精确制导方式很多,包括主动式、半主动式和被动式寻的制导方式,通过设在精确制导武器
第30卷 第9期2007年9月 计 算 机 学 报 CH INESE JOURNA L OF COM PU TERS Vo l.30N o.9 Sept.2007 收稿日期:2005-11-12;修改稿收到日期:2007-01-21.本课题得到国家自然科学基金(60672066)和国家 八六三 高技术研究发展计划项目基金(2006AA01Z131)资助.谷红亮,男,1977年生,博士,讲师,研究方向为位置感知计算、嵌入式系统、分布式多媒体.E -mail:hlgu @https://www.doczj.com/doc/8a5508745.html,.史元春,女,1967年生,教授,博士生导师,研究领域为人机交互、分布式多媒体、普适计算.申瑞民,男,1967年生,教授,博士生导师,研究领域为E -Learning 网络教育技术、多媒体网络协同工作.陈 渝,男,1972年生,博士,讲师,研究方向为嵌入式系统、操作系统. 一种用于智能空间的多目标跟踪室内定位系统 谷红亮1) 史元春2) 申瑞民1) 陈 渝 2) 1)(上海交通大学网络教育学院 上海 200030) 2) (清华大学计算机科学与技术系 北京 100084) 摘 要 定位系统是智能空间位置感知计算的基础部件,它不仅要能较精确定位多目标,而且在方向性、可携带性等方面也要满足要求.文中设计了一种室内定位系统Cicada,该系统基于射频和超声波到达时间差来测量距离,并采用滑窗滤波和卡尔曼滤波的方法计算位置.实验表明它对静止和移动目标都能提供平均5cm 的定位精度,拥有全向型的工作区域,便于携带,具有较好的规模伸缩度以及易部署性,能较全面地满足智能空间定位的需求.关键词 普适计算;位置感知计算;定位系统;扩展卡尔曼滤波;滑窗滤波器中图法分类号T P 391 A Mult-i O bject Tracking Indoor Positioning System for Smart Space GU H ong -Liang 1) SH I Yuan -Chun 2) SH EN Ru-i M in 1) CH EN Yu 2) 1) (Ne tw ork Ed ucation Colleg e ,S hang hai Jiaoton g Univ er sity ,S hang hai 200030) 2) (Dep artment of Comp uter S cience and T echnolog y ,T singh ua Univ er sity ,B eij ing 100084) Abstract T he location sensing sy stem (also called po sitio ning system )is an underlying co mpo -nent for location -aw are computing in Smart Space,w hich not only dem ands the location sensing system to locate m ultiple o bjects w ith desirable precision,but also super im poses the require -m ents,such as dir ectio nal char acteristic and portability etc,on it.This paper presents an indoo r location sensing system,Cicada.This system is based on the T DoA (Time Difference of Arr iv al)betw een radiofrequency and ultraso und to estimate distance,and em plo ys a technolog y integ ra -ting Slide Window Filter and Ex tended Kalman Filter to calculate location.As the ex periments pro ve,Cicada can pro vide the average 5cm location precision both for static objects and for mo bile objects,ow ns a nearly o mn-i directional w orking area r anging from -90degree to +90degree. Besides,it is able to run independently,mini and light so that it is co nvenient to be po rtable and ev en embedded into people s parapher nalia.Further,it is also flex ible in scalability,for neither quantity range nor co nstraint of structure form is demanded on its infrastructur https://www.doczj.com/doc/8a5508745.html,st,it is fairly facile to be em plo yed,attributing to the w ireless co nnectivity in its infrastructur e.Those advan -tages illuminate that it is able to be co mpetent fo r al-l r ound location sensing requirements of Sm art Space.Keywords pervasive/ubiquitous computing;location -aw are com puting;po sitioning system; ex tended Kalman filter;slide w indow filter
——人形目标检测与跟踪
一、 本组研究方案,算法系统框图 二、 检测算法、原理、程序实现方法、调试过程 【视频处理】 老师提供的两端视频两段视频并不能直接用来输入OpenCV 所编程序处理,需要将其转化为无压缩的avi 格式。利用软件WinAVI Video Converter ,转换为ZJMedia uncompressed RGB24格式。 【背景建模】 我们小组利用N 帧图像的平均来求取背景,并实时对背景进行更新。由于考虑到ExhibitionHall.avi 视频中运动物体所占场景比例少,运动轨迹为直线,为了处理的简单,所以在这不刻意区分物体和背景像素点。即(1)(1)()()A A A B k B k I k αα+=-+ ,这里的α 很小(0.003) 。 【前景提取】 灰度图像的处理比彩色图像的处理过程简单。我们小组将读入的彩色图像变成灰度图像,并二值化;同样,背景也进行二值化。两者做差值,得到一些离散的黑白点块。也就
是要识别的目标。但是,这样得到的块是分散开的,程序 并不能完整的把它们识别成一个人形,而是一个本来很完 整的人形被分块识别成多个目标。为此,我们做了一些简 单的后处理。先腐蚀元素,去除不必要的杂点,然后进行 膨胀块处理,自定义块的大小,使其膨胀成能被识别成一 个人形的目标。另外,我们还做个简单的高斯低通滤波, 是得到的结果光滑些。其流程图如右。 【目标检测】 根据前景处理的结果,得到一些连续的块目标。利用帧间差,可以提取出目标的轮廓。根据轮廓的位置分布,计算出检测目标的形心和大小。并予以标记。 【目标跟踪】 根据目标帧间的位移差值,可以计算出运动目标在x ,y 方向上的运动速度。可以利用这个关系判断下一帧目标的位置。设置一个合适的阈值,就可以实现目标的跟踪。在此,我们还引入了重叠判断机制。如果目标重叠,即通过遍历,发现块重叠大于一定阈值后,根据前面得到的位置预测判断当前物块位置;如果不重叠,则遍历这幅图像中的所有物块,寻找临近最优物块,以保持编号连续性。在目标跟踪过程中,还进行了Kalman 滤波,对目标轨迹进行滤波处理。 目标跟踪 …… 目标 (Id,Pos,Size) 目标 (Id,Pos,Size) 目标 1 目标 (Pos,Size) 目标 (Pos,Size) 目标N 目标 (Pos,Size) 目标 (Pos,Size)
(目标管理)目标检测、跟踪与识别技术与战争
《图像检测、跟踪和识别技术》论文 论文题目: 图像检测、跟踪和识别技术和现代战争 专业:探测制导和控制技术 学号:35152129 姓名:刘孝孝 目标检测、跟踪和识别技术和现代战争 【摘要】本文讨论目标检测、跟踪和识别技术于现代战争各个领域中的应用,总结目标识别技术的发展方向,提出目标识别技术工程化实现方法,同时本文介绍了国外目标识别的现状及发展趋势,提出了现代战争应采用综合识别系统解决目标识别问题的建议。 关键词目标检测;目标跟踪;目标识别;雷达;人工神经网络;精确制导 1.引言 随着现代科学技术的飞速发展及其于军事领域内日益广泛的应用,传统的作战思想、作战方式已发生根本性的变化。从第壹次海湾战争到科索沃战争,特别是刚刚结束的海湾战争,空中精确打击和空地壹体化作战已经成为最重要的作战形式。集指挥、控制、通信、计算机、情报、监视侦察于壹体的CISR已成为取得战场主动权,赢得最后胜利的关键因素。目标识别技术是雷达智能化、信息化的重要技术支撑手段。于现代化战争中,目标识别技术于预警探测、精确制导、战场指挥和侦察、敌我识别等军事领域均有广泛的应用前景,已受到了世界各国的关注。 现代战争中取得战场制信息权的关键之壹是目标属性识别。现代战争的作战环境十分复杂,作战双方均于采用相应的伪装、隐蔽、欺骗和干扰等手段和技术,进行识别和反识别斗争。因此仅仅依靠壹种或少数几种识别手段很难准确地进行目标识别,必须利用多个和多类
传感器所收集到的多种目标属性信息,综合出准确的目标属性,进行目标检测,跟踪后进行识别。 2.目标检测、跟踪和识别技术于现代战争中的应用 2.1目标检测、跟踪和识别技术于预警探测上的应用 目标检测、跟踪和识别技术对于弹道导弹的预警工作有重要的作用。弹道导弹壹般携带多个弹头,其中可能包含核弹头或大规模杀伤的弹头以及常规弹头,预警雷达必须具备对目标进行分类和识别真假弹头的能力,将核弹头或大规模杀伤的弹头分离出来,为弹道导弹防御(BMD)系统进行目标攻击和火力分配提供依据。早期的BMD系统假设只有壹个核弹头,多弹头分导技术的出现,使问题转化为雷达的多目标识别问题,加上电子对抗技术的广泛使用,给目标识别技术带来很大困难。另外,预警雷达仍要对空中目标或低空目标进行探测,对来袭目标群进行分类识别。利用星载雷达以及远程光学望远镜等观测设备,能够对外空目标进行探测,对外空来袭目标进行分类和识别,达到早期预警的工作。 2.2目标检测、跟踪和识别技术于精确制导上的应用 精确制导方式很多,包括主动式、半主动式和被动式寻的制导方式,通过设于精确制导武器外部的制导站的遥控制导方式,利用地形(高度)匹配和景像(灰度)匹配制导方式,只依靠弹上惯性部件提供制导数据,而不依赖外部信息的惯性制导方式,利用卫星定位(GPS)系统的GPS制导方式。任何壹种制导方式均有其优缺点,壹般来讲,远程精确制导武器均采用俩种之上的制导方式构成复合制导系统,这样不仅能提高制导精度而且也能增强抗干扰能力。于导弹飞行中对目标进行识别,然后进行攻击的技术已经成为这个领域的壹个研究热点,目标成像识别技术将是当前的发展方向。大量的研究试验表明,采用高分辨率雷达获得目标的壹维或二维图像,可使目标识别变得简易而清晰。如美军研制的反导系统陆基相控阵雷达,采用宽带逆合成孔径(ISAR)技术,即利用“距离壹多普勒”的原理,实现对活动目标的雷达
视频目标检测与跟踪算法综述 1、引言 运动目标的检测与跟踪是机器视觉领域的核心课题之一,目前被广泛应用在 视频编码、智能交通、监控、图像检测等众多领域中。本文针对视频监控图像的运动目标检测与跟踪方法,分析了近些年来国内外的研究工作及最新进展。 2、视频监控图像的运动目标检测方法 运动目标检测的目的是把运动目标从背景图像中分割出来。运动目标的有效分割对于目标分类、跟踪和行为理解等后期处理非常重要。目前运动目标检测算法的难点主要体现在背景的复杂性和目标的复杂性两方面。背景的复杂性主要体现在背景中一些噪声对目标的干扰,目标的复杂性主要体现在目标的运动性、突变性以及所提取目标的非单一性等等。所有这些特点使得运动目标的检测成为一项相当困难的事情。目前常用的运动目标检测算法主要有光流法、帧差法、背景相减法,其中背景减除法是目前最常用的方法。 2.1 帧差法 帧差法主要是利用视频序列中连续两帧间的变化来检测静态场景下的运动目标,假设(,)k f x y 和(1)(,)k f x y +分别为图像序列中的第k 帧和第k+1帧中象素点(x ,y)的象素值,则这两帧图像的差值图像就如公式2-1 所示: 1(1)(,)(,)k k k Diff f x y f x y ++=- (2-1) 2-1式中差值不为0的图像区域代表了由运动目标的运动所经过的区域(背景象素值不变),又因为相邻视频帧间时间间隔很小,目标位置变化也很小,所以运动目标的运动所经过的区域也就代表了当前帧中运动目标所在的区域。利用此原理便可以提取出目标。下图给出了帧差法的基本流程:1、首先利用2-1 式得到第k 帧和第k+1帧的差值图像1k Diff +;2、对所得到的差值图像1k Diff +二值化(如式子2-2 示)得到Qk+1;3、为消除微小噪声的干扰,使得到的运动目标更准确,对1k Q +进行必要的滤波和去噪处理,后处理结果为1k M +。 111255,,(,)0,,(,)k k k if Diff x y T Q if Diff x y T +++>?=?≤? (T 为阈值) (2-2)