摘要:基于视觉理论的神经网络模式识别理论的研究一直是非常活跃的学科,被认为是神经网络应用最成功的一个方面,它的发展与神经网络理论可以说是同步的。几乎所有现有的神经网络物理模型都在模式识别领域得到了成功的应用,神经网络理论取得进步会给模式识别理论的发展带来鼓舞;相反,模式识别理论的进步又会大大推动神经网络理论的长足发展。它们的关系是相互渗透的。
关键词:神经网络;模式识别
Abstract: The research of pattern recognition theories according to the neural network mode of sense of vision theories has been very active in academics, neural network has been thought one of the most successful applications , its development can been seen as the same step with the neural network theories.Almost all existing physics model of the neural network all identified realm to get success in the mode of application, neural network theories' progress will give the development of the pattern recognition theories much encourage;Contrary, the pattern recognition theories of progress again consumedly push neural network theories of substantial development.Their relations permeate mutually.
Key word: neural network; pattern recognition
模式识别在神经网络中的研究
一、人工神经网络模式识别系统的意义
人工神经网络是近年来的研究热点,其应用于建模、时间序列分析、模式识别和控制等领域。它的理论与实践有引人注目的进展, 再一次拓展了计算概念的内涵, 使神经计算、进化计算成为新的学科。在此同时, 神经网络的软件模拟得到了广泛的应用
使用机器来进行模式识别是一项有价值的工作。比如用机器来辨别银行的签字和邮政编码, 那么它就能在相同的时间里做比人多得多的工作。模式识别不仅省时, 而且经济, 同时还能将劳动者从繁杂的重复劳动中解脱出来
二、模式识别的基本原理
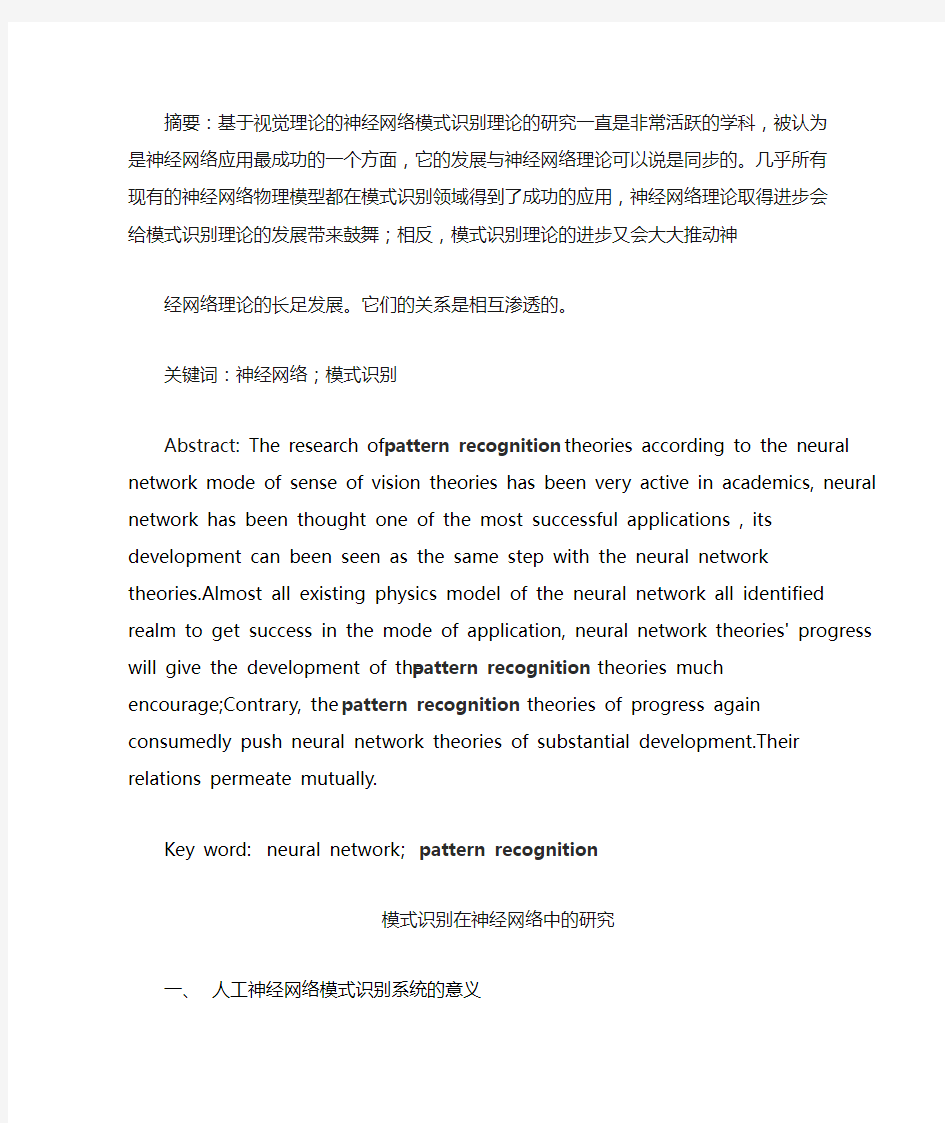
模式识别系统的结构如图一所示,下面对各部分进行简要说明。
图一模式识别系统的构成
(1)信息获取:为了使计算机能够对各种现象进行分类识别,要用计算机可以运算的符号来表示所研究的对象。通常输入对象的信息有二维图像、一维波形、物理参量和逻辑值三种类型。通过测量采样和量化,可以用矩阵或向量表示二维图像或一维波形。这就是数据获取的过程。
(2)预处理:去噪声,提取有用信息,并对输入测量仪器或其它因素所造成的退化现象进行复原
(3)特征值提取与选择:由图像或波形所获得的数据量是相当大的。例如,一个文字图像可以有几千个数据,一个卫星遥感图像的数据量就更大。为了有效的实现分类识别,就要对原始数据进行变换,得到最能反映分类本质的特征。三、神经网络模式识别的特点
(1)它具有自组织和自学习能力,能够直接输入数据并进行学习。神经网络对多要处理的对象在样本空间的分布状态无须作任何假设,而是直接从数据中学习样本之间的关系,因而他们还可以解决那些因为不知道本分部而无法解决的识别问题。
(2)神经网络具有推广能力。它可以根据样本间的相似性,对那些与原始训练样本相似的数据进行正确处理。
(3)网络是非线性的,即它可以找到系统输入变量之间复杂的相互作用。在一个线性系统中,改变输入往往产生一个成比例的输出。但在一个非线性系统中,这种影响关系是一个高阶函数,这一特点很适合于实时系统,因为实时系统通常是非线性的。神经网络则为这种复杂系统提供了一种实用的解决办法。
四、基于神经网络的几种控制图表的模式识别
对控制图表模式的分析,已经成为当今工业生产制造的一个热点话题。通过对控制图表的研究更为快捷的找出生产过程中的异常状况,通过对控制图异常的分析,对控制图表进行自动识别,可以大大的提高企业的生产、检测、质量保证等各部门的自动化程度。通过建立人工神经网络来对控制图表进行识别,可以有效的减少变量间的非线性关系造成的大量影响,是辨识过程更加准确,而且通过训练可以让网络适用于更多不同的具体情况。
4.1网络结构
网络分为两大部分,第一层为判断层,用于判断输入图表的种类;第二层为再分类层,用于对第一层所判断的种类进行一次再划分,把分类错误图表划入它应属于的种类。
第一层采用的是3层的前向BP网来构建输入层个数为10,隐层为3,输出层个数为6,第二层利用第一层所得到的输出参数,进行比较再分类。将0个连续的观测点的数据经过数据处理作为神经网络的输入量。输出层包括6个神经元,每个神经元代表一种模式类型,若为该模式,对应神经元输出1,否则为-1,如正常模式为【1,-1,-1,-1,-1,-1】,逐渐上升趋势模式为【-1,1,-1,-1,-1,-1】
第一层结构通过分析输入数据对数据的模式进行分类,然后根据图表模式对应的类别将数据输入到第二层网络中训练。第二层中的网络和第一层所使用的结
构相同,即分类层、阶跃模块、趋势模块、周期模块均有相同的结构。三个子网构成一个复合型的神经网络,每个网络处理对应网络,通过处理,分别可以得到:阶跃模式的幅度的大小、趋势模式的斜率、周期模式的周期以及振幅,;例如:周期模块的输出为【-1,1,1,0.23,3,-1】,其中0.23为输入控制图的振幅,周期为3。
这样构建网络的好处是,提高同一网络模块的利用率,将图表模式分类和图表参数估计统一到一个复合网络中,降低程序的复杂度。
图二网络结构
4.2 控制图表基本模式
控制图表的基本模式有(a)正常模式;(b)阶跃模式;(c)趋势模式;(d)周期模式(如图三)。
图三控制图表基本模式
五、常用的模式识别神经网络模型
5.1 感知机及BP网络
BP算法的基本思想是,学习过程由信号的正向传播与误差的反向传播两个过程组成。正向传播时,输入样本从输入层传入。经各层逐层处理后,传向输出层。若输出层的实际输出与期望的输出(教师信号)不符,则转入误差的反向传播阶段。误差反传是将输出误差以某种形式通过隐层向输入层逐层反传、并将误差分摊给各层的所有单元,从而获得各层单元的误差信号,此误差信号即作为修正各单元权值的依据。这种信号正向传播与误差反向传播的各层权值调整过程,是周而复始的进行的。权值不断调整的过程,也就是网络的学习训练过程。此过程一直进行到网络输出的误差减少到可接受的程度,或进行到预先设定的学习次数为止。
5.2竞争学习和侧抑制
上述前馈网络属于监督学习,需要同时提供输入样本和相应的理想输出。引进竞争机制的前馈网络可以实现无监督学习,完成类聚的任务。竞争学习网络的结构与二层前馈网络类似,只是在输出层加上了侧抑制。侧抑制是将输出层各单元之间相互作用较大的负权值输入对方的输出,这种互连构成正反馈,类似于双稳态或多稳态触发器。
5.3 自组织特征映射
人脑是由大量的神经元组成的,大脑中分布着大量的只有协同作用的神经元群
体,同时大脑网络又是一个复杂的反馈系统,即包括局部反馈,也包括整体反馈及化学交互作用,聚类现象对于大脑的信息处理起着重要作用。自组织映射网络的学习算法也是一种竞争学习算法,区别只是输出层具有几何分布,由交互作用函数取代了简单的侧抑制,因此其学习算法也是类似的。
参考文献
[1] 傅京孙. 模式识别应用[M]. 北京: 北京大学出版社, 1990.
[2] 张天序. 模式识别与智能系统研究展望和对策. 自动化学报2002 ,28: 92-94.
[3] 江铭虎,袁保宗等. 神经网络语音识别的研究及进展. 电信科学 1997,13 (7):1-5.
[4] 严红平,潘春洪. 模式识别简述. 自动化博览. 2006:22-26.
[5] 边肇祺,张学工等. 模式识别[M]. 北京: 清华大学出版, 2000.
[6] 王碧泉,陈祖荫. 模式识别理论方法和应用[M]. 北京: 地震出版社, 1989.
[7] 曾庆鹏,吴水秀等. 模式识别中的特征提取研究. 中文核心期刊《微计算机
信息》(测控自动化)2008,24(1-1):220-221.
[8] 熊承义,李玉海. 统计模式识别及其发展现状综述. 武汉: 科技进步与对策. 2003.
[9] 熊超. 模式识别理论及其应用综述. 中国科技信. 2006,6:171-172.
[10] 温星. 浅谈人类模式识别的特点. 山西经济管理干部学院学报. 2008,16(1):57-58
[11] 张涛,洪文学等. 模式识别中的表示问题. 燕山大学学报. 2005,32 (5):382-388.
[12] 耿冠宏,孙伟. 神经网络模式识别. 软件导刊. 2008,7(10):81-83.
clear all;
close all;
Data=[0 1 0 1 2 1 2 3 6 7 8 6 7 8 9 7 8 9 8 9
0 0 1 1 1 2 2 2 6 6 6 7 7 7 7 8 8 8 9 9;];
[DataRow,DataColumn]=size(Data);
Step=10;
NumKind=2;
Center=Data(:,1:NumKind);
[KindData,KindNum]=Clustering(Center,Data);
NewCenter=CaculateCenter(KindData,KindNum,DataRow);
while (sum(sum(NewCenter~=Center))) & Step
Center=NewCenter;
[KindData,KindNum]=Clustering(Center,Data);
NewCenter=CaculateCenter(KindData,KindNum,DataRow);
Step=Step-1;
end
for i=1:NumKind
KindData(:,1:KindNum(i),i)
end
if DataRow~=2
disp('The result can not display on the two-dimensional figure ') else
XMin=min(Data(1,:));
YMin=min(Data(2,:));
YMax=max(Data(2,:));
XMax=max(Data(1,:));
KindDisplay(KindData,KindNum,XMin,XMax,YMin,YMax) End
function [KindData,KindNum]=Clustering(Center,Data) [DataRow,DataColumn]=size(Data);
[CenterRow,CenterColumn]=size(Center);
KindData=zeros(DataRow,DataColumn,CenterColumn); KindNum=linspace(0,0,CenterColumn);
for i=1:DataColumn
Distance=linspace(0,0,CenterColumn);
for j=1:CenterColumn
for k=1:DataRow
Distance(j)=Distance(j)+(Data(k,i)-Center(k,j)).^2;
end
end
Distance=sqrt(Distance);
[X,Y]=min(Distance);
KindData(:,KindNum(Y)+1,Y)=Data(:,i);
KindNum(Y)=KindNum(Y)+1;
End
function NewCenter=CaculateCenter(KindData,KindNum,DataRow) TotalKindNum=length(KindNum);
NewCenter=zeros(DataRow,TotalKindNum);
for i=1:TotalKindNum
Temp=KindData(:,1:KindNum(i),i);
NewCenter(:,i)=sum(Temp')'/KindNum(i);
End
function Display(KindData,KindNum)
[DataRow,DataColumn]=size(Data);
if DataRow~=2
function KindDisplay(KindData,KindNum,XMin,XMax,YMin,YMax) figure
TotalKindNum=length(KindNum);
for i=1:TotalKindNum
Temp=KindData(:,1:KindNum(i),i);
plot(Temp(1,:),Temp(2,:),'*')
axis([XMin,XMax,YMin,YMax])
hold on
pause
end
#include
#include
//a=b
void copy(double a[],double b[])
{
int i=2;
for(i=0;i<2;i++)
{
a[i]=b[i];
}
}
//a=a+b
void add(double a[],double b[])
{
a[0]=a[0]+b[0];
a[1]=a[1]+b[1];
}
//a=b返回1,否则返回0
int compare(double a[],double b[])
{
if(a[0]==b[0]&&a[1]==b[1])
return 1;
else
return 0;
}
//返回a和b的距离
double distance(double a[],double b[])
{
return (sqrt((a[0]-b[0])*(a[0]-b[0])+(a[1]-b[1])*(a[1]-b[1])));
}
//k均值子程序
void Kaverage(double x[20][2],int label[])//label[i]表示x[i]标签(1或2)
{
double centre1[2]={0,0},centre2[2]={0,0};
copy(centre1,x[0]);
copy(centre2,x[9]);//初始聚类中心为x1和x10,将x[9]代之以x[1],运行结果和教科书上例题一致
int j=1;
while(j>0)
{
int i;
int N1=0,N2=0;
for(i=0;i<20;i++)
{
if(distance(x[i],centre1)>=distance(x[i],centre2))
{
label[i]=2;
N2=N2+1;
}
else
{
label[i]=1;
N1=N1+1;
}
}
double new1[2]={0,0},new2[2]={0,0};
for(i=0;i<20;i++)
{
if(label[i]==1)
add(new1,x[i]);
else
add(new2,x[i]);
}
new1[0]=new1[0]/N1;
new1[1]=new1[1]/N1;
new2[0]=new2[0]/N2;
new2[1]=new2[1]/N2;
if(compare(new1,centre1)==1&&compare(new2,centre2)==1) break;
else
{
copy(centre1,new1);
copy(centre2,new2);
}
j++;
}
printf("centre1=%f,%f\n",centre1[0],centre1[1]);
printf("centre2=%f,%f\n",centre2[0],centre2[1]);
int i;
printf("聚类中心为centre1=%f,%f的有\n",centre1[0],centre1[1]);
for(i=0;i<20;i++)
if(label[i]==1)
printf("x[%d]\n",i);
printf("聚类中心为centre2=%f,%f的有\n",centre2[0],centre2[1]);
for(i=0;i<20;i++)
if(label[i]==2)
printf("x[%d]\n",i);
}
//主程序
void main()
{
double
x[20][2]={{0,0},{1,0},{0,1},{1,1},{2,1},{1,2},{2,2},{3,2},{6,6},{7,6},{8,6},{6,7},{7,7},{8,7},{ 9,7},{7,8},{8,8},{9,8},{8,9},{9,9}};
int label[20];
Kaverage(x,label);
}
神经网络模式识别Matlab程序识别加入20%噪声的A-Z26个字母。(20%噪声情况下,完全能够识别)clear;close all; clc; [alphabet,targets]=prprob; [R,Q]=size(alphabet); [S2,Q]=size(targets); S1=10; P=alphabet; net=newff(minmax(P),[S1,S2],{'logsig''logsig'},'traingdx'); net.LW{2,1}=net.LW{2,1}*0.01; net.b{2}=net.b{2}*0.01; T=targets; net.performFcn='sse'; net.trainParam.goal=0.1; net.trainParam.show=20; net.trainParam.epochs=5000; net.trainParam.mc=0.95; [net,tr]=train(net,P,T); netn=net; netn.trainParam.goal=0.6; netn.trainParam.epochs=300; T=[targets targets targets targets]; for pass=1:10; P=[alphabet,alphabet,... (alphabet+randn(R,Q)*0.1),... (alphabet+randn(R,Q)*0.2)]; [netn,tr]=train(netn,P,T); end netn.trainParam.goal=0.1; netn.trainParam.epochs=500; netn.trainParam.show=5; P=alphabet; T=targets; [netn,tr]=train(netn,P,T); noise_percent=0.2; for k=1:26 noisyChar=alphabet(:,k)+randn(35,1)*noise_percent; subplot(6,9,k+floor(k/9.5)*9); plotchar(noisyChar); de_noisyChar=sim(net,noisyChar); de_noisyChar=compet(de_noisyChar);
神经网络动态系统的辨识与控制 摘要: 本论文表明神经网络对非线性动态系统进行有效的辨识与控制。本论文的侧重点是辨识与控制模型,并论述了动态反向传播以及静态反向传播方法在参数调节中的作用。在所介绍的模型中,加法器与重复网络结构的内部相连很独特,所以很有必要将他们统一起来进行研究。由仿真结果可知辨识与自适应控制方案的提出是可行的。整篇论文中都介绍到基本的概念和定义,也涉及了必须提出的学术性问题, 简介 用数学系统理论处理动态系统的分析与合成在过去的五十年里已经被列为应用广泛的权威科学原理了。权威系统理论最先进的地方定义于基于线性代数以及复合变量理论的先进技术线性操作器以及线性常微分方程。由于动态系统的设计技术与它们的稳定特性密切相关,线性时间不变系统的充分必要条件在上世纪已经产生了,所以已经建立了动态系统的著名设计方法。相反,只要在系统对系统基础上就可以基本上建立非线性系统的稳定性,因此对于大部分系统没有同时满足稳定性、鲁棒性以及良好动态响应的设计程序并不希奇。 过去三十年来,对线性、非时变和具有不确定参数的对象进行辨识与自适应控制的研究已取得了很大的进展。但是在这些研究中辨识器和控制器的结构选取和保证整个系统全局稳定性的自适应调参规律的构成等,都是建立在线性系统理论基础上的[1]。在本论文中,我们感兴趣的是神经网络非线性动态系统的控制与辨识。由于很少有可以直接应用的非线性系统理论结果存在,所以必须密切关注这个问题以及辨识器和控制器结构的选择和调整参数适应性规则的通用性问题。 在人工神经网络领域里,有两类网络今年来最引人注目:它们是(1)多层神经网络(2)回归神经网络。多层神经网络被证实在解决模式辨识问题[2]-[5]上非常成功。而回归神经网络则经常用于联想记忆以及制约优化问题的解决[[6]-[9]。从系统理论的观点来看,多层网络呈现静态非线性映射,而回归网络则通过非线性动态反馈系统显现。尽管两种网络存在外观上的不同外,但是很有必要将他们用统一成更一般化的网络。事实上,笔者确信将来会越来越多的用到动态因素以及反馈,这导致包括两种网络的复杂系统的产生。这样,将两个网络统一起来就成为必要。在本文的第三章,这个观点会得到进一步的阐述。 本文用了三个主要目标。第一个也是最重要的一个目标是在未知非线性动态系统中为自适应控制利用神经网络提出辨识以及控制器结构。当未知参数线性系
神经网络在系统辨识中的应用 摘要应用于自动控制系统的神经网络算法很多,特点不一,对于非线性系统辨识的研究有一定影响。本文就BP网络算法进行了着重介绍,并点明了其收敛较慢等缺点,进而给出了改进算法,说明了建立在BP算法基础上的其他算法用于非线性系统辨识的可行性与有效性。 关键词神经网络BP算法;辨识;非线性系统 前言 神经网络是一门新兴的多学科研究领域,它是在对人脑的探索中形成的。神经网络在系统建模、辨识与控制中的应用,大致以1985年Rumelhart的突破性研究为界。在极短的时间内,神经网络就以其独特的非传统表达方式和固有的学习能力,引起了控制界的普遍重视,并取得了一系列重要结果。本文以神经网络在系统辨识中的应用作一综述,而后着重介绍BP网络算法,并给出了若干改进的BP算法。通过比较,说明改进算法具有诸多优点及用于非线性系统辨识[1]的可行性与有效性。 1 神经网絡用于系统辨识的原理及现状 神经网络在自动控制系统中的应用已有多年。目前,利用神经网络建立动态系统的输入/输出模型的理论及技术,在许多具体领域的应用得到成功,如化工过程、水轮机、机器入手臂、涡轮柴油发动机等。运用神经网络的建模适用于相当于非线性特性的复杂系统[2]。 目前系统辨识中用得最多的是多层前馈神经网络[1]。我们知道,自动控制系统中,一个单隐层或双隐层的具有任意数目神经元的神经网络,可以产生逼近任意函数的输入/输出映射。但网络的输入节点数目及种类(延迟输入和输出)、隐层节点的个数以及训练所用的算法对辨识精度和收敛时间均有影响。一般根据系统阶数取延迟输入信号,根据经验确定隐层节点数,然后对若干个神经网络进行比较,确定网络中神经元的合理数目。现在用得较多的多层前馈神经网络的学习算法是反向传播算法(Back Propagation),即BP算法。但BP算法收敛速度较慢,后面将会进一步讨论。 1.1 神经网络的结构 感知器是最简单的前馈网络,它主要用于模式分类。也可用在基于模式分类的学习控制和多模态控制中。现以多层前馈神经网络为代表,来说明神经网络的结构。多层前馈神经网络由输入、输出层以及一个或多个隐层组成。每层有若干个计算单元称之神经元。这些神经元在层状结构的网络中按图1所示方式相互连接。信息按树状路径从下至上逐层传送。一旦相邻层间神经元的连接权以及隐层中神经元的阈值被确定,整个网络的特性也就确定了。如图1所示,第1层为输
人工神经网络模式识别 一、人工神经网络模式识别 1、人工神经网络的概述 人工神经网络从人脑的生理学和心理学角度出发,通过模拟人脑的工作机理,实现机器的部分智能行为,是从微观结构和功能上对人脑进行抽象和简化,是模拟人类智能的一条重要途径。具体的模式识别是多种多样的,如果从识别的基本方法上划分,传统的模式识别大体分为统计模式识别和句法模式识别,在识别系统中引入神经网络是一种近年来发展起来的新的模式识别方法。尽管引入神经网络的方法和引入网络的结构可以各不相同,但都可称为神经网络模式识别。而且这些识别方法在解决传统方法较难处理的某些问题上带来了新的进展和突破,因而得到了人们越来越多的重视和研究。 人工神经元网络(Artificial Neural Network)简称神经网络,是基于日前人们对自然神经系统的认识而提出的一些神经系统的模型,一般是由一系列被称为神经元的具有某种简单计算功能的节点经过广泛连接构成的一定网络结构,而其网络连接的权值根据某种学习规则在外界输入的作用下不断调节,最后使网络具有某种期望的输出特性。神经网络的这种可以根据输入样本学习的功能使得它非常适合于用来解决模式识别问题,这也是神经网络目前最成功的应用领域之一。 2、神经网络进行模式识别的方法和步骤 神经网络模式识别的基本方法是,首先用己知样本训练神经网络,使之对不同类别的己知样本给出所希望的不同输出,然后用该网络识别未知的样本,根据各样本所对应的网络输出情况来划分未知样本的类别。神经网络进行模式识别的一般步骤如图2-1所示,分为如下几个部分: 预处理 样本获取常规处理特征变换神经网络识别 图 2-1 神经网络模式识别基本构成 1、样本获取 这一步骤主要是为了得到一定数量的用于训练和识别的样本。
人工神经网络控制 摘要: 神经网络控制,即基于神经网络控制或简称神经控制,是指在控制系统中采用神经网络这一工具对难以精确描述的复杂的非线性对象进行建模,或充当控制器,或优化计算,或进行推理,或故障诊断等,亦即同时兼有上述某些功能的适应组合,将这样的系统统称为神经网络的控制系统。本文从人工神经网络,以及控制理论如何与神经网络相结合,详细的论述了神经网络控制的应用以及发展。 关键词: 神经网络控制;控制系统;人工神经网络 人工神经网络的发展过程 神经网络控制是20世纪80年代末期发展起来的自动控制领域的前沿学科之一。它是智能控制的一个新的分支,为解决复杂的非线性、不确定、不确知系统的控制问题开辟了新途径。是(人工)神经网络理论与控制理论相结合的产物,是发展中的学科。它汇集了包括数学、生物学、神经生理学、脑科学、遗传学、人工智能、计算机科学、自动控制等学科的理论、技术、方法及研究成果。 在控制领域,将具有学习能力的控制系统称为学习控制系统,属于智能控制系统。神经控制是有学习能力的,属于学习控制,是智能控制的一个分支。神经控制发展至今,虽仅有十余年的历史,已有了多种控制结构。如神经预测控制、神经逆系统控制等。 生物神经元模型 神经元是大脑处理信息的基本单元,人脑大约含1012个神经元,分成约1000种类型,每个神经元大约与102~104个其他神经元相连接,形成极为错综复杂而又灵活多变的神经网络。每个神经元虽然都十分简单,但是如此大量的神经元之间、如此复杂的连接却可以演化出丰富多彩的行为方式,同时,如此大量的神经元与外部感受器之间的多种多样的连接方式也蕴含了变化莫测的反应方式。 图1 生物神经元传递信息的过程为多输入、单输出,神经元各组成部分的功能来看,信息的处理与传递主要发生在突触附近,当神经元细胞体通过轴突传到突触前膜的脉冲幅度达到一定强度,即超过其阈值电位后,突触前膜将向突触间隙释放神经传递的化学物质,突触有两
摘要:基于视觉理论的神经网络模式识别理论的研究一直是非常活跃的学科,被认为是神经网络应用最成功的一个方面,它的发展与神经网络理论可以说是同步的。几乎所有现有的神经网络物理模型都在模式识别领域得到了成功的应用,神经网络理论取得进步会给模式识别理论的发展带来鼓舞;相反,模式识别理论的进步又会大大推动神经网络理论的长足发展。它们的关系是相互渗透的。 关键词:神经网络;模式识别 Abstract: The research of pattern recognition theories according to the neural network mode of sense of vision theories has been very active in academics, neural network has been thought one of the most successful applications , its development can been seen as the same step with the neural network theories.Almost all existing physics model of the neural network all identified realm to get success in the mode of application, neural network theories' progress will give the development of the pattern recognition theories much encourage;Contrary, the pattern recognition theories of progress again consumedly push neural network theories of substantial development.Their relations permeate mutually. Key word: neural network; pattern recognition
实验七基于神经网络的模式识别实验 一、实验目的 理解BP神经网络和离散Hopfield神经网络的结构和原理,掌握反向传播学习算法对神经元的训练过程,了解反向传播公式。通过构建BP网络和离散Hopfield 网络模式识别实例,熟悉前馈网络和反馈网络的原理及结构。 二、实验原理 BP学习算法是通过反向学习过程使误差最小,其算法过程从输出节点开始,反向地向第一隐含层(即最接近输入层的隐含层)传播由总误差引起的权值修正。BP网络不仅含有输入节点和输出节点,而且含有一层或多层隐(层)节点。输入信号先向前传递到隐节点,经过作用后,再把隐节点的输出信息传递到输出节点,最后给出输出结果。 离散Hopfield神经网络的联想记忆过程分为学习和联想两个阶段。在给定样本的条件下,按照Hebb学习规则调整连接权值,使得存储的样本成为网络的稳定状态,这就是学习阶段。联想是指在连接权值不变的情况下,输入部分不全或者受了干扰的信息,最终网络输出某个稳定状态。 三、实验条件 Matlab 7.X 的神经网络工具箱:在Matlab 7.X 的命令窗口输入nntool,然后在键盘上输入Enter键,即可打开神经网络工具箱。 四、实验内容 1.针对教材P243例8.1,设计一个BP网络结构模型(63-6-9),并以教材图8.5 为训练样本数据,图8.6为测试数据。 (1)运行train_data.m和test_data.m文件,然后从Matlab工作空间导入(Import)训练样本数据(inputdata10,outputdata10)和测试数据(testinputdata,testoutputdata),其次新建一个神经网络(New Network),选择参数如下表1,给出BP神经网络结构图。
神经网络系统建模综述 一、人工神经网络简介 1.1人工神经网络的发展历史 人工神经网络早期的研究工作应追溯至本世纪40年代。下面以时间顺序,以著名的人物或某一方面突出的研究成果为线索,简要介绍人工神经网络的发展历史。 1943年,心理学家W·Mcculloch和数理逻辑学家W·Pitts在分析、总结神经元基本特性的基础上首先提出神经元的数学模型。此模型沿用至今,并且直接影响着这一领域研究的进展。因而,他们两人可称为人工神经网络研究的先驱。 1945年冯·诺依曼领导的设计小组试制成功存储程序式电子计算机,标志着电子计算机时代的开始。 50年代末,F·Rosenblatt设计制作了“感知机”,它是一种多层的神经网络。这项工作首次把人工神经网络的研究从理论探讨付诸工程实践。 在60年代初期,Widrow提出了自适应线性元件网络,这是一种连续取值的线性加权求和阈值网络。后来,在此基础上发展了非线性多层自适应网络。当时,这些工作虽未标出神经网络的名称,而实际上就是一种人工神经网络模型。 80年代初期,模拟与数字混合的超大规模集成电路制作技术提高到新的水平,完全付诸实用化,此外,数字计算机的发展在若干应用领域遇到困难。这一背景预示,向人工神经网络寻求出路的时机已经成熟。美国的物理学家Hopfield于1982年和1984年在美国科学院院刊上发表了两篇关于人工神经网络研究的论文,引起了巨大的反响。人们重新认识到神经网络的威力以及付诸应用的现实性。随即,一大批学者和研究人员围绕着Hopfield提出的方法展开了进一步的工作,形成了80年代中期以来人工神经网络的研究热潮。 1.2人工神经网络的工作原理 人工神经网络是由大量处理单元广泛互连而成的网络结构,是人脑的抽象、简化和模拟。人工神经网络就是模拟人思维的第二种方式。这是一个非线性动力学系统,其特色在于信息的分布式存储和并行协同处理。虽然单个神经元的结构极其简单,功能有限,但大量神经元构成的网络系统所能实现的行为却是极其丰富多彩的。 人工神经网络首先要以一定的学习准则进行学习,然后才能工作。所以网络学习的准则应该是:如果网络作出错误的的判决,则通过网络的学习,应使得网络减少下次犯同样错误的可能性。
基于BP神经网络语音识别方法研究 摘要:神经网络是近年来信息科学、脑科学、神经心理学等诸多学科共同关注和研究的热点。由于其具有良好的抽象分类特性,现已应用于语音识别系统的研究和开发,并成为解决识别相关问题的有效工具。文章在讲述语音识别过程的基础上重点讨论利用BP神经网络对语音进行识别,用MATLAB完成对神经网络的训练和测试,并获得满意的结果。 关键词:语音识别;模式识别;BP神经网络, 1 绪论 计算机的飞速发展,使人们的生活方式发生了根本性的改变,鼠标、键盘,这些传统的人机接口使人们体会到了生活的便利。科学技术日新月异,假如让“机器”能够听懂人的语言,并根据其信息去执行人的意图,那么这无疑是最理想的人机智能接口方式,因此语音识别作为一门极具吸引力的学科应运而生,很多专家都指出语音识别技术将是未来十年信息技术领域十大重要的科技发展技术之一。 1.1 研究背景及意义 语言在人类的智能组成中充当着很重要的角色,人与人之间的交流和沟通大部分是通过语言的方式有效的完成。作为人与人之问交流最方便、自然、快捷的手段,人们自然希望它成为人与计算机交流的媒介。随着数字信号处理及计算机科学的飞速发展,人们对实现人机对话产生越来越迫切的要求,使得语音识别技术近年来得到了迅速的发展,语音识别技术的研究进入了一个比较成熟的时期。语音识别是一门交叉科学,它综合了声学、语言学、语音学、生理科学、数字信号处理、通信理论、电子技术、计算机科学、模式识别和人工智能等众多学科。也是人机交互最重要的一步。 1.2 语音识别的国内外研究现状 通过语音传递信息是人类最重要,最有效,和最方便的交换信息的形式,语音识别主要指让机器转达人说的话,即在各种情况下,准确的识别出语音的内容,从而根据其信息,执行人的各种意图。 广义的语音识别包括说话人的识别和内容的识别两部分。这里所说的语音识别,是指内容识别方面。采用计算机进行语音识别到现在已经发展了50年。 从特征参数上改进,采用各种办法进行语音增强是一个研究方向,但是到目前为止,还没有一种办法能把语音信号完美地从噪音环境提取出来。语音识别有广泛的商业化运用前景,主要可以分为通用场合和专用场合两个方面。 1.3研究内容 本文研究的主要内容是结合模式识别的基本理论,研究BP神经网络孤立词语音识别的问
系统辨识研究综述 摘要:本文综述了系统辨识的发展与研究内容,对现有的系统辨识方法进行了介绍并分析其不足,进一步引出了把神经网络、遗传算法、模糊逻辑、小波网络知识应用于系统辨识得到的一些新型辨识方法。并对基于T-S模型的模糊系统辨识进行了介绍。文章最后对系统辨识未来的发展方向进行了介绍 关键词:系统辨识;建模;神经网络;遗传算法;模糊逻辑;小波网络;T-S 模型 1.系统辨识的发展和基本概念 1.1系统辨识发展 现代控制论是控制工程新的理论基础。辨识、状态估计和控制理论是现代控制论三个相互渗透的领域。辨识和状态估计离不开控制理论的支持;控制理论的应用又几乎不能没有辨识和状态估计。 而现代控制论的实际应用不能脱离被控对象的动态特性,且所用的数学模型需要选择一种使用方便的描述形式。但很多情况下建立被控对象的数学模型并非易事,尤其是实际的物理或工程对象,它们的机理复杂且含有各种噪声,使建立数学模型更加困难。系统辨识就是应此需要而形成的一门学科。 系统辨识和系统参数估计是六十年代开始迅速发展起来的。1960年,在莫斯科召开的国际自动控制联合会(IFCA)学术会议上,只有很少几篇文章涉及系统辨识和系统参数估计问题。然而,在此后,人们对这一学科给予了很大的注意,有关系统辨识的理论和应用的讨论日益增多。七十年代以来,随着计算机的开发和普及,系统辨识得到了迅速发展,成为了一门非常活跃的学科。 1.2系统辨识基本概念的概述 系统辨识是建模的一种方法。不同的学科领域,对应着不同的数学模型,从某种意义上讲,不同学科的发展过程就是建立它的数学模型的过程。建立数学模型有两种方法:即解析法和系统辨识。 L. A. Zadeh于1962年给辨识提出了这样的定义:“辨识就是在输入和输出数据的基础上,从一组给定的模型类中,确定一个与所测系统等价的模型。”当然按照Zadeh的定义,寻找一个与实际过程完全等价的模型无疑是非常困难的。根据实用性观点,对模型的要求并非如此苛刻。1974年,P. E. ykhoff给出辨识的定义“辨识问题可以归结为用一个模型来表示客观系统(或将要构造的系统) 本质为: 特征的一种演算,并用这个模型把对客观系统的理解表示成有用的形式。而1978
西安科技大学 毕业设计(论文) 开题报告 题目基于神经网络的车牌字符识别方法研究及仿真实现院、系(部) 通信与电子信息工程学院 专业及班级电子信息工程专业 姓名 学号 指导教师 日期
西安科技大学毕业设计(论文)开题报告
[7]陈振学,汪国有,刘成云. 一种新的车牌图像字符分割与识别算法[J]. 微电子学与计算机, 2007,(02) . [8]朱正礼. 基于三层BP 神经网络的字符识别系统的实现[J]. 现代计算机, 2006,(10) . [9]刘静,周静华,苏俊连,付佳. 基于模板匹配的车牌字符识别算法实现[J]. 科技信息(科学教研), 2007,(24) . [10]苏厚胜. 车牌识别系统的设计与实现[J]. 可编程控制器与工厂自动化, 2006,(03) . [11]胡振稳, 尹朝庆. 基于BP 神经网络的车牌字符识别的研究[J]. 电脑知识与技术(学术交流), 2007,(02) [12]蒋良孝, 李超群. 基于 BP 神经网络的函数逼近方法及其 MATLAB 实现[J]. 微型机与应用, 2004,(01) [13]崔屹. 数字图象处理技术与应用. 电子工业出版社. [14]董长虹. MATLAB 图象处理. 国防工业出版社. [15]董长虹. MATLAB 神经网络与应用国防工业出版社. [16]MATLAB6.5 辅助图象处理.飞思科技产品研发科技中心. [17]H. S. Kim et al, "Recognition of a car number plate by a neural network", Proc. of Korea Information Science Society(KISS) fill conference,Vol. 18, NO. 2, pp. 259-262,1991. [18]Jang-Hee You,Byung-Tae Chun and Dong-Pil Shin,“A Neural for Recognizing Characters Extracted form Moving Vehicles”,World Congress On Neural Network, pp162-166,1994. [19]M. Momozawa,M.N omua,T.Namai and K. Morisaki,"Accident Vehicle Automatic Detection System by Image Processing Technique”,pp.566-570, 2004..
系统辨识课程综述 通过《系统辨识》课程的学习,了解了系统辨识问题的概述及研究进展;掌握了经典的辨识理论和辨识技术及其优缺点,如:脉冲响应法、最小二乘法(LS)和极大似然法等;同时对于那些为了弥补经典系统辨识方法的不足而产生的现代系统辨识方法的原理及其优缺点有了一定的认识,如:神经网络系统辨识、基于遗传算法的系统辨识、模糊逻辑系统辨识、小波网络系统辨识等;最后总结了系统辨识研究的发展方向。 一、系统辨识概论 自40年代Wiener创建控制论和50年代诞生工程控制论以来,控制理论和工程就一直围绕着建立模型和控制器设计这两个主题来发展。它们相互依赖、相互渗透并相互发展;随着控制过程的复杂性的提高以及控制目标的越来越高,控制理论的应用日益广泛,但其实际应用不能脱离被控对象的数学模型。但是大多数情况下,被控对象的数学模型是不知道的,或者在正常运行期间模型的参数可能发生变化,此时建立模型需要细致、完整地分析系统的机理和所有对该系统的行为产生影响的各种因素,从而变得十分困难。系统辨识建模正是适应这一需要而产生的,它是现代控制理论中一个很活跃的分支。 系统辨识是建模的一种方法,不同的学科领域,对应着不同的数学模型。从某种意义上来说,不同学科的发展过程就是建立他的数学模型的过程。所谓系统辨识,通俗地说,就是研究怎样利用对未知系统的试验数据或在线运行数据(输入/输出数据),运用数学归纳、统
计回归的方法建立描述系统的数学模型的科学。Zadeh与Ljung明确提出了系统辨识的三个要素:输入输出数据,模型类和等价准则。总之,辨识的实质就是从一组模型类中选择一个模型,按照某种准则,使之能最好地拟合我们所关心的实际过程的静态或动态特性。 通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号;对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。而系统辨识亦称为实验建模方法,它是“系统分析”和“控制系统设计”的逆问题。通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。 二、经典的系统辨识 经典的系统辨识方法包括脉冲响应法、最小二乘法(LS)和极大似然法等。其中最小二乘法(LS)是应用最广泛的方法,但由于它是非一致的,是有偏差性,所以为了克服他的缺陷,形成了一些以最小二乘法为基础的系统辨识方法:广义最小二乘法(GLS)、辅助变量法(IV)、增广最小二乘法(ELS)、广义最小二乘法(GLS),以及将一般的最小二乘法与其他方法相结合的方法,有:最小二乘两步法(COR—LS)
实验七:基于神经网络的模式识别实验 一、实验目的 理解BP神经网络和离散Hopfield神经网络的结构和原理,掌握反向传播学习算法对神经元的训练过程,了解反向传播公式。通过构建BP网络和离散Hopfield网络模式识别实例,熟悉前馈网络和反馈网络的原理及结构。 综合掌握模式识别的原理,了解识别过程的程序设计方法。 二、实验内容 熟悉模式识别的理论方法,用选择一种合适的识别方法,对图像中的字符(英文字母)进行识别,能够区分出不同的形态的26个字母。 在Matlab中,采用BP神经网络,对读取的数据进行训练,进而识别。 1. 程序设计 (1)程序各流程图 实验中主程序流程图如图4-1所示:
图4-1主程序流程图 其中图像预处理的流程如图4-2 所示: 图4-2图像预处理的流程神经网络训练的具体流程如图4-3所示:
图4-3 神经网络训练流程 (2)程序清单 %形成用户界面 clear all; %添加图形窗口 H=figure('Color',[0.85 0.85 0.85],... 'position',[400 300 500 400],... 'Name','基于BP神经网络的英文字母识别',... 'NumberTitle','off',... 'MenuBar','none'); %画坐标轴对象,显示原始图像 h0=axes('position',[0.1 0.6 0.3 0.3]); %添加图像打开按钮 h1=uicontrol(H,'Style','push',... 'Position',[40 100 80 60],... 'String','选择图片',... 'FontSize',10,... 'Call','op'); %画坐标轴对象,显示经过预处理之后的图像 h2=axes('position',[0.5 0.6 0.3 0.3]); %添加预处理按钮
系统辨识方法综述 摘要 在自然和社会科学的许多领域中,系统的设计、系统的定量分析、系统综合及系统控制,以及对未来行为的预测,都需要知道系统的动态特性。在研究一个控制系统过程中,建立系统的模型十分必要。因此,系统辨识在控制系统的研究中起到了至关重要的作用。本文论述了用于系统辨识的多种方法,重点论证了经典系统辨识方法中运用最广泛的的最小二乘法及其优缺点,引出了将遗传算法、模糊逻辑、多层递阶等知识应用于系统辨识得到的一些现代系统辨识方法,最后总结了系统辨识今后的发展方向。 关键字:系统辨识;最小二乘法;遗传算法;模糊逻辑;多层递阶 Abstract In many fields of natural and social science, the design of the system, the quantitative analysis of the system, the synthesis of the system and the control of the system, as well as the prediction of the future behavior, all need to know the dynamic characteristics of the system. It is very necessary to establish a system model in the process of studying a control system. Therefore, system identification plays an important role in the research of control system. This paper discusses several methods for system identification, the key argument is that the classical system identification methods using the least squares method and its advantages and disadvantages, and leads to the genetic algorithm, fuzzy logic, multi hierarchical knowledge application in system identification of some modern system identification method. Finally, the paper summarizes the system identification in the future direction of development. Keywords:System identification; least square method; genetic algorithm; fuzzy logic; multi hierarchy 第一章系统辨识概述 系统辨识是研究建立系统数学模型的理论和方法。系统辨识是建模的一种方法,不同的学科领域,对应着不同的数学模型。从某种意义上来说,不同学科的发展过程就是建立他的数学模型的过程。辨识问题可以归结为用一个模型来表示客观系统(或将要构造的系统)本质牲征的一种演算,并用这个模型把对客观系统的理解表示成有用的形式。当然也可以有另外的描述,辨识有三个要素:数据,模型类和准则。辨识就是按照一个准则在一组模型类中
神经网络系统辨识综述 目前,国内外有许多利用神经网络来模拟设备性能、预测负荷的成功例子。1993 年,美国的Mistry和Nair成功开发了一个用来决定预期平均满意率(PMV)和温湿度参数的神经网络模型。1994 年,Curtiss利用神经网络模型成功地模拟了一台往复压缩式的冷水机组和其它暖通空调设备的性能。随后,Darred和Curtiss利用神经网络模型成功地预测了冷水机组的冷负荷和耗电量。在国内,也有利用神经网络对暖通空调优化控制、对空调器进行仿真研究的成功例子。神经网络之所以能够在国内外得到如此广泛的应用是因为: a)神经网络具有模拟高度非线性系统的优点; b)神经网络具有较强的学习能力、容错能力和联想能力; c)神经网络具有较强的自适应能力。 例如可通过重新训练网络进行设备特性的动态校准功能,这也是它优于其它控制方法的主要特点。此外,神经网络模型还具有建模时间短、易于进行计算机模拟的优点。对于智能建筑,其热动力学参数模型本质上为分布参数系统,应用系统辨识也很难获得其精确的数学模型,控制效果可想而知,而人工神经网络允许在模型理论不完善的情况下,构成一种具有自学习、自适应的体系结构,在与外界信息的交互作用中,形成一种非线性映射或线性动力学系统,以正确反映输入和输出关系而不必预先知道这种关系的精确数学模型。 神经网络在线性系统辨识中的应用 自适应线性(Adaline-Mada Line)神经网络作为神经网络的初期模型与感知机模型相对应,是以连续线性模拟量为输入模式,在拓扑结构上与感知机网络十分相似的一种连续时间型线性神经网络。这种网络模型是美国学者Widrow和Hoff
基于神经网络模型的最新系统辨识算法 摘要:神经网络具有大规模并行分布式结构、自主学习以及泛化能力,因此可以利用神经网络来解决许多传统方法无法解决的问题。神经网络应用在非线性系统的辨识中有良好的结果。本文在阅读大量参考文献的基础上,对最新的基于神经网络的系统辨识算法进行总结。 关键字:神经网络;系统辨识;辨识算法 The latest algorithm about identification system based on neural network model Abstract: Neural network has large parallel distributed structure, learning by itself and has generalization ability. So neural network is used to solve many questions which traditional method cannot. Neural network is well applied to nonlinear system which has got good achievements in identification system. Based on most of documents, the paper summaries the latest algorithm about identification system based on neural network model. Keywords:Neural network, identification system, identification algorithm 0 前言 在国内,系统辨识也取得了许多成绩,尽管成果丰硕,但传统辨识法仍存在不少局限:传统辨识法较适用于输入端中扰动水平比较低的控制系统,对于具有外界干扰的控制系统,就会出现计算量大、鲁棒性不够好的问题;最小二乘法及其相关改进算法一般利用梯度算法进行信息搜索,容易陷入局部极小值。鉴于此,神经网络控制在系统辨识中得到了新的应用。本文在阅读大量文献后,针对国内基于神经网络的结合其他算法的最新辨识算法进行综述分析。 1 神经网络的应用优势 神经网络的吸引力在于:能够充分逼近任意复杂的非线性关系,能够学习适应不确定性系统的动态特性;所有定量或定性的信息都分布储存于网络内的各个神经元,所以有很强的鲁棒性和容错性;采用并行分
四、神经网络系统辨识分析(25分) 用BP 神经网络进行系统在线逼近的原理框图如图3所示 ) (k y n (k u (k y 图3 图4 假设某控制对象的模型为2 3 )1(1) 1()()(-+-+ =k y k y k u k y ,采样时间取t=1ms ,输入信号 t)sin(650.)u(π=k 。采用的BP 神经网络结构如图4所示,权值ij w 和2j w 的初值取 [-1,+1] 之间的随机值,权值采用δ学习算法,学习速率η取0.50,动量因子α取0.05。试分析神经网络在线逼近的运行过程,并作Matlab 仿真。 题目四、需要阐述清楚BP 网络逼近控制对象的工作原理和学习过程 BP 算法的基本思想是:对于一个输入样本,经过权值、阈值和激励函数运算后,得到一个输出y n (k),然后让它与期望的样本y(k)进行比较,若有偏差,则从输出开始反向传播该偏差,进行权值、阈值调整,使网络输出逐渐与希望输出一致。 BP 算法由四个过程组成:输入模式由输入层经过中间层向输出层的“模式顺传播”过程,网络的希望输出与网络的实际输出之间的误差信号由输出层经过中间层向输入层逐层修正连接权的“误差逆传播”过程,由“模式顺传播”与“误差逆传播”的反复交替进行的网络“记忆训练”过程,网络趋向于收敛即网络的全局误差趋向极小值的 “学习收敛”过程。 BP 网络(Back Propagation ),该网络是一种单向传播的多层前向网络。误差 反向传播的BP 算法简称BP 算法,其基本思想是梯度下降法。它采用梯度搜索技术,以期使网络的实际输出值与期望输出值的误差均方值为最小。 BP 网络特点: (1)是一种多层网络,包括输入层、隐含层和输出层; (2)层与层之间采用全互连方式,同一层神经元之间不连接; (3)权值通过δ学习算法进行调节;
神经网络的应用及其发展
神经网络的应用及其发展 来源:辽宁工程技术大学作者: 苗爱冬 [摘要] 该文介绍了神经网络的发展、优点及其应用和发展动向,着重论述了神经网络目前的几个研究热点,即神经网络与遗传算法、灰色系统、专家系统、模糊控制、小波分析的结合。 [关键词]遗传算法灰色系统专家系统模糊控制小波分析 一、前言 神经网络最早的研究20世纪40年代心理学家Mcculloch和数学家Pitts 合作提出的,他们提出的MP模型拉开了神经网络研究的序幕。神经网络的发展大致经过三个阶段:1947~1969年为初期,在这期间科学家们提出了许多神经元模型和学习规则,如MP模型、HEBB学习规则和感知器等;1970~1986年为过渡期,这个期间神经网络研究经过了一个低潮,继续发展。在此期间,科学家们做了大量的工作,如Hopfield教授对网络引入能量函数的概念,给出了网络的稳定性判据,提出了用于联想记忆和优化计算的途径。1984年,Hiton教授提出Boltzman机模型。1986年Kumelhart等人提出误差反向传播神经网络,简称BP网络。目前,BP网络已成为广泛使用的网络;1987年至今为发展期,在此期间,神经网络受到国际重视,各个国家都展开研究,形成神经网络发展的另一个高潮。神经网络具有以下优点: (1) 具有很强的鲁棒性和容错性,因为信息是分布贮于网络内的神经元中。 (2) 并行处理方法,使得计算快速。 (3) 自学习、自组织、自适应性,使得网络可以处理不确定或不知道的系统。 (4) 可以充分逼近任意复杂的非线性关系。 (5) 具有很强的信息综合能力,能同时处理定量和定性的信息,能很好地协调多种输入信息关系,适用于多信息融合和多媒体技术。 二、神经网络应用现状 神经网络以其独特的结构和处理信息的方法,在许多实际应用领域中取得了显著的成效,主要应用如下: (1) 图像处理。对图像进行边缘监测、图像分割、图像压缩和图像恢复。 (2) 信号处理。能分别对通讯、语音、心电和脑电信号进行处理分类;可用于海底声纳信号的检测与分类,在反潜、扫雷等方面得到应用。 (3) 模式识别。已成功应用于手写字符、汽车牌照、指纹和声音识别,还可用于目标的自动识别和定位、机器人传感器的图像识别以及地震信号的鉴别
第3期2019年2月No.3February,2019 人们在特定时刻的感觉在临床术语中被称为“情绪”。6种基本情绪被认为是快乐、悲伤、愤怒、恐惧、厌恶和惊讶,而其他已知的人类情感往往被视为这6种复杂社交情境的特殊化。研究人员从各种观点研究了情绪在人工智能中的作用:开发与人类更优雅互动的代理人和机器人,开发利用情绪模拟来辅助自己推理的系统,或创建更接近人体情感互动和学习的机器人。皮卡德指出:“智能复杂自适应系统中将会有功能,它们必须响应不可预测的复杂信息,这些信息起着情感在人们身上发挥作用的作用。”因此,对于计算机以实时方式响应复杂的情感信号,他们将需要像我们所拥有的系统,我们称之为情感。 人类的情感不仅是一种合乎逻辑的理性成分,它们与行为和感情紧密相连。人类情感系统在生存、社会互动和合作以及学习中起着至关重要的作用。机器需要一种情感—机器运动。因此,我们可以确定智能机器需要情绪,以便在学习复杂任务时以及在对人类的学习和决策制定进行建模时提高其表现。 情绪在人类决策过程中发挥着重要作用,因此,当我们试图模拟人类反应时,它们应该嵌入推理过程中。Bates 使用Ortony 等描述的模型提出了一个可信的代理人。该模型仅描述了基本情绪和先天反应;然而,它为构建计算机情感模拟提供了一个很好的起点。Kort 等提出了一个模型,他们的目的是概念化情绪对学习的影响,然后,建立一个工作的基于计算机的模型,将识别学习者的情感状态并对其作出适当的反应,以便学习将以最佳的速度进行。Poel 等引入了模拟混合神经网络架构,用于情绪学习。系统从注释数据中学习如何产生情绪状态以及由内部和外部刺激引起的变化。Clocksin 探讨了记忆中的问题,并结合可能的人工认知架构进行了研究。这项工作与人工智能研究中考虑记忆和情感的传统方式背道而驰,并且源于社会和发展心理学中出现的两种思想[1]。 本文提出了一种基于情绪反向传播学习算法的情绪神经网络。情绪神经网络具有两种模拟情绪,有助于网络学习和分类过程。这两种情绪是焦虑和自信。结合这些情绪参数的基本原理是它们对我们人类认知过程中的学习的影响。在实践中,两个情感参数意味着当情绪神经网络被训练时,一个是使用所有节点作为训练模式样本的输入平均值,另一个是某种程度上的增加惯性项用于在训练时期进展时修改从一种模式到下一种模式的变化水平。从数学的角度来看,当接 近成本函数的最小值时,我们不希望被单个模式的误差所左 右,其中一些模式可能是异常值。因此,我们关注最近学习步骤积累的“记忆”。 本文旨在研究这些额外的情绪参数对情绪神经网络在学习和决策中的表现的影响。我们使用脸部图像数据库,它已经在我们以前的作品中有效地使用。该数据库包括270个不同性别,种族和年龄的30人的图像,具有各种照明条件和对比度。面部图像的多样性旨在研究情绪神经网络的稳健性。 1 具有情绪参数的学习算法 反向传播学习算法是用于训练分层神经网络的广义delta 规则。自前人引入该算法以来,该算法已被广泛使用。在本节中,基于情绪反向传播学习算法的情绪神经网络学习算法,根据情绪神经网络内的信息流详细解释,该网络由3层组成:输入层(i )神经元,具有(h )神经元的隐藏层和具有(j )神经元的输出层。1.1 输入层神经元 这些是非处理神经元;每个输入层神经元的输出定义为YIi =Xii 其中, XIi 和YIi 分别是输入和输出输入层中神经元i 的值。1.2 隐藏层神经元 这些是处理神经元,因此, S 形激活函数用于激活该层中的每个神经元。这里,假设有一个隐藏层。但是相同的过程可以应用于多个隐藏层。 其中XHh 和YHh 分别是隐藏层中神经元h 的输入和输出值。使用进入该神经元的所有输入值的总电位计算隐藏层神经元XHh 的输入。总电位是输入值的乘法和它们的相关权重的总和。 其中Whi 是隐藏神经元h 给予输入神经元i 的权重, YIi 是输入神经元i 的输出, r 是输入层神经元的最大数量。其中Whb 是由隐藏神经元h 给予隐藏层偏置神经元b 的权重, Xb 是偏置神经元的输入值。1.3 输出层神经元 这些也是处理神经元,因此, S 形激活函数用于激活该层中的每个神经元。 其中XJj 和YJj 分别是输出层中神经元j 的输入和输出值。除了偏置和情绪神经元之外,还使用从先前隐藏层馈送神经元的所有输入值的总电位来计算输出层神经元XJj 的输入。 作者简介:吴思楠(1997— ),女,辽宁丹东人,本科生;研究方向:计算机科学与技术。 摘 要:文章研究了情绪神经网络的效率,该网络使用改进的反向传播学习算法。实验结果表明,人工情绪可以成功建模并有 效实施,以改善神经网络的学习和普遍性。关键词:神经网络;反向传播算法;人工情感建模;面部识别基于神经网络的人脸识别技术方法研究 吴思楠 (辽宁师范大学海华学院,辽宁 沈阳 110167) 无线互联科技 Wireless Internet Technology