数字信号处理实验报告
姓名:任伟平 专业: 通信与信息系统 学号: 2015111806 日期:2015.11
实验内容
任务一:
一连续平稳的随机信号()t x ,自相关函数()t
x e
r -=τ,信号()t x 为加性噪声所干扰,噪
声是白噪声,测量值的离散值()k z 为已知,s T s 02.0=,-3.2,-0.8,-14,-16,-17,-18,-3.3,-2.4,-18,-0.3,-0.4,-0.8,-19,-2.0,-1.2,-11,-14,-0.9,-0.8,10,0.2,0.5,-0.5,2.4,-0.5,0.5,-13,0.5,10,-12,0.5,-0.6,-15,-0.7,15,0.5,-0.7,-2.0,-19,-17,-11,-14,自编卡尔曼滤波递推程序,估计信号()t x 的波形。
任务二:
设计一维纳滤波器。
(1)产生三组观测数据:首先根据()()()n w n as n s +-=1产生信号()n s ,将其加噪(信噪比分别为20dB ,10dB ,6dB ),得到观测数据() n x 1,() n x 2,() n x 3。
(2)估计() n x i , 1=i ,2,3的AR 模型参数。假设信号长度为L ,AR 模型阶数为N ,分析实验结果,并讨论改变L ,N 对实验结果的影响。
实验任务一 1. 卡尔曼滤波原理
1.1 卡尔曼滤波简介
早在20世纪40年代,开始有人用状态变量模型来研究随机过程,到60年代初,由于空间技术的发展,为了解决对非平稳、多输入输出随机序列的估计问题,卡尔曼提出了递推最优估计理论。它用状态空间法描述系统,由状态方程和量测方程所组成,即知道前一个状态的估计值和最近一个观测数据,采用递推的算法估计当前的状态值。由于卡尔曼滤波采用递推法,适合于计算机处理,并且可以用来处理多维和非平稳随机信号,现已广泛应用于很多领域,并取得了很好的结果。卡尔曼滤波一经出现,就受到人们的很大重视,并 在实践中不断丰富和完善,其中一个成功的应用是设计运载体的高精度组合导航系统。卡尔曼滤波具有以下的特点:
(1)算法是递推的,且状态空间法采用在时域内设计滤波器的方法,因而适用于多维随机过程的估计;离散型卡尔曼算法适用于计算机处理。
(2)用递推法计算,不需要知道全部过去的值,用状态方程描述状态变量的动态变化规律,因此信号可以是平稳的,也可以是非平稳的,即卡尔曼滤波适用于非平稳过程。
(3)卡尔曼滤波采取的误差准则仍为估计误差的均方值最小。
1.2 卡尔曼滤波的状态方程和测量方程
假设某系统k 时刻的状态变量为k x ,状态方程和量测方程(输出方程)表示为
k
k k k k k k k v x C y w x A x +=+=---111
其中,k x 是状态变量;1-k w 表示输入信号是白噪声;k v 是观测噪声;k y 是观测数据。
为了推导简单,假设状态变量的增益矩阵A 不随时间发生变化,k w ,k v 都是均值为零的正态白噪声,方差分别是k Q 和k R ,并且初始状态与k w ,k v 都不相关,γ表示相关系数。即:
[][]kj
k v v k v
k k kj
k w w k w k k R R v E v Q Q w E w j k j k δγσδγσ======,2
,2
,,0:,,0:
其中
??
?≠==j
k j
k kj 01 δ
1.3 卡尔曼滤波的递推算法
卡尔曼滤波采用递推算法来实现,其基本思想是先不考虑输入信号k w 和观测噪声k v 的影响,得到状态变量和输出信号(即观测数据)的估计值,再用输出信号的估计误差加权后校正状态变量的估计值,使状态变量估计误差的均方值最小。因此,卡尔曼滤波器的关键是计算出加权矩阵的最佳值。
当不考虑观测噪声和输入信号时,状态方程和量测方程为
1
'
1
'
-∧
∧
∧-∧
∧===k k k k k k k k k x A C x C y x A x
显然,由于不考虑观测噪声的影响,输出信号的估计值与实际值是有误差的,用k y ~
表示
'
~
k k k y y y ∧-=
为了提高状态估计的质量,用输出信号的估计误差k y ~
来校正状态变量
??? ??-+=???? ??-+=-∧-∧∧-∧
∧
11'1C k k k k k k k k k
k k k k x A y H x A y y H x A x 其中,k H 为增益矩阵,即加权矩阵。经过校正后的状态变量的估计误差及其均方值分别用k x ~
和k P 表示,把未经校正的状态变量的估计误差的均方值用'
k P 表示
????
???
????? ??-???? ??-=????
??????? ??-??? ??-=-=∧∧∧∧∧
T
k k k k k T k k k k k k
k k x x x x E P x x x x E P x x x ''~
卡尔曼滤波要求状态变量的估计误差的均方值k P 为最小,因此卡尔曼滤波的关键即为通过选择合适的k H ,使得k P 取得最小值。首先推导状态变量的估计值k x ∧
和状态变量的的估计误差k x ~
,然后计算~
x 的均方值k P ,通过化简k P ,得到一组卡尔曼滤波的递推公式:
()
()??????
?
??-=+=+=??? ??-+=----∧
-∧∧'11'1''11k
k k k k T k k k k
k T
k k k T k k k k k k k k k k k P C H I P Q
A P A P R C P C C P H x A C y H x A x 假设初始条件k A ,k C ,k Q ,k R ,k y ,1-k x ∧,1-k P 已知,其中[]00x E x =∧
,[]00var x P =,
那么递推流程如下:
1-k x ∧
,1
-k P '
k
P
k H k x ∧
,k P
2. 卡尔曼滤波递推程序编程思想
题目分析
(1)由于信号()t x 为加性噪声所干扰,可知k k k v x y +=,所以1=k C
(2)又因为噪声为白噪声,所以()102
===vv v k S R σ
(3)因为()t
x e
r -=τ,所以
()()()()()
1
112
111
10
111111--------∞
==--=-∞
=-∞
=-∞=--∞
=-∞
=----=-+-=+===
∑∑∑∑z e z e e z e ez z e z e z
e z
e
z
m r z S m m m
m m m m
m m m m
m
m m m
xx xx
由此可知,1
111----=z e z B z ,即()()()111
-=---n w n x e n x ,可得到:1-=e A k
,因为抽样间隔s T s 02.0=,所以:02.0--==e e
A s
T k 。
(4)因此()()()n x e
n x n w s
T --+=1,所以
[]()()[]T ww w k e n w n w E r Q 22
10--====σ
因此04
.01--=e Q k
编程分析
由上面的分析可知初始条件k A ,k C ,k Q ,k R ,k y 已知,在仿真中假设00=x ,则00=∧
x
,
10=P ,由以上参数可得卡尔曼实际递推公式
()
()??????
?
??-=-+=+=??? ??-+=-----∧
--∧-∧'04
.0104.0'1'
'102.0102.011k
k k k k
k
k k k k k k k P H I P e P e P P P H x e y H x e x
将得到的公式代入前面分析的递推公式,即可进行迭代得到结果k x 。
3. MATLAB 源代码
根据以上分析,编写matlab 程序如下:
%%
%---------------卡尔曼滤波----------------- %-----说明
%X(k+1)=Ak*X(k)+W(k); %Y(k)=Ck*X(k)+V(k) %% clear;clc; %基本参数值
Ak=exp(-0.02);Ck=1; Qk=1-exp(-0.04);Rk=1; %初始值设置 X0=0;P0=1; %观测值y(k)
Y=[-3.2 -0.8 -14 -16 -17 -18 -3.3 -2.4 -18 -0.3 -0.4 -0.8 -19 -2.0 -1.2 ...
-11 -14 -0.9 0.8 10 0.2 0.5 2.4 -0.5 0.5 -13 0.5 10 -12 0.5 -0.6 -15 -0.7 15 ...
0.5 -0.7 -2.0 -19 -17 -11 -14]; %数据长度
N=length(Y);
for k=1:N
if k==1 %k=1时由初值开始计算
P_(k)=Ak*P0*Ak'+Qk;
H(k)=P_(k)*Ck'*inv(Ck*P_(k)*Ck'+Rk);
X(k)=Ak*X0+H(k)*(Y(k)-Ck*Ak*X0);
I=eye(size(H(k)));
P(k)=(I-H(k)*Ck)*P_(k);
else%k>1时,开始递推
%递推公式
P_(k)=Ak*P(k-1)*Ak'+Qk;
H(k)=P_(k)*Ck'*inv(Ck*P_(k)*Ck'+Rk);
X(k)=Ak*X(k-1)+H(k)*(Y(k)-Ck*Ak*X(k-1)); I=eye(size(H(k)));
P(k)=(I-H(k)*Ck)*P_(k);
end
end
M=1:N;T=0.02*M;
%作图,画出x(t)的波形
figure(1)
plot(T,Y,'r','LineWidth',1);
xlabel('t');ylabel('y(t)');
title('卡尔曼滤波-测量信号y(t)波形');
grid;
figure(2)
plot(T,X,'b','LineWidth',1);
xlabel('t');ylabel('x(t)');
title('卡尔曼滤波-估计信号x(t)波形');
grid;
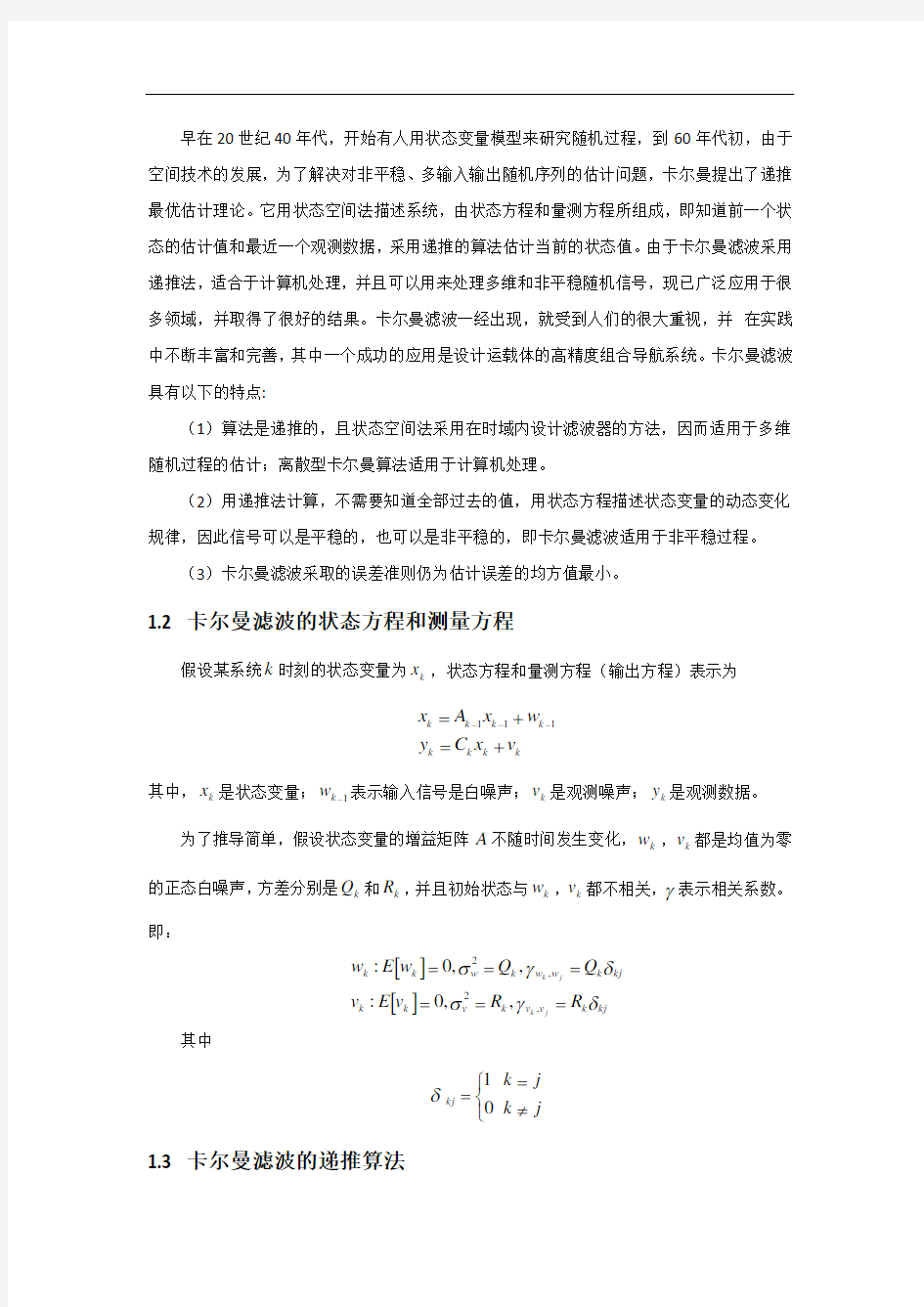
4. 实验结果
0.10.20.30.4
0.50.60.70.80.9
-20
-15-10-50
5
10
15
t
y (t )
卡尔曼滤波-测量信号y(t)波形
0.10.20.30.4
0.50.60.70.80.9
t
x (t )
卡尔曼滤波-估计信号x(t)波形
实验任务二 1. 维纳滤波器原理
维纳-霍夫方程
()()()()()k r k h m k r m h k r xx m xx xd *0
=-=∑+∞
=
当()n h 是一个长度为M 的因果序列(即一个长度为M 的FIR 滤波器)时,维纳-霍夫方程表述为
()()()()() ,,,210*1
==-=∑-=k k r k h m k r m h k r xx M m xx xd
定义
0.10.20.30.40.50.60.70.80.9
-20-15
-10
-5
5
10
15
《人体解剖学实验报告指导》 解剖教研室编写
医学高等专科学校 目录 第一章绪言 一、实验课的目的及要求………………………… 二、实验报告书写要求…………………………… 三、实验室守则…………………………………… 第二章实验指导及报告 任务一观察躯干骨及其连结………………………… 任务二观察颅骨及其连结…………………………… 任务三观察四肢骨及其连结………………………… 任务四观察头颈肌(系解+局解)…………………… 任务五观察躯干肌(系解+局解)…………………… 任务六观察四肢肌(系解+局解)………………… 任务七观察消化系统………………………………… 任务八观察呼吸系统……………………………….. 任务九观察泌尿系统……………………………….. 任务十观察男性生殖系统……………………………….. 任务十一观察女性生殖系统……………………………. 任务十二观察腹膜分泌系统……………………. 任务十三观察心脏模型…………………… 任务十四观察全身动脉…………………… 任务十五观察全身静脉…………………………..
任务十六观察淋巴系统……………………………. 任务十七观察眼模型……………………………… 任务十八观察耳模型…………………………………任务十九观察脊髓模型………………………………任务二十观察脑干、小脑、间脑、端脑………… 任务二十一观察中枢神经系统传导通路………………任务二十二观察脑的被膜、血管……………………任务二十三观察脑神经…………………………………任务二十四观察脊神经…………………………………任务二十五观察脏神经……………………………
卡尔曼滤波计算举例 ?计算举例 ?卡尔曼滤波器特性
假设有一个标量系统,信号与观测模型为 [1][][]x k ax k n k +=+[][][] z k x k w k =+其中a 为常数,n [k ]和w [k ]是不相关的零均值白噪声,方差分别为和。 系统的起始变量x [0]为随机变量,其均值为零,方差为。2n σ2 σ[0]x P (1)求估计x [k ]的卡尔曼滤波算法;(2)当时的卡尔曼滤波增益和滤波误差方差。 22 0.9,1,10,[0]10 n x a P =σ=σ==1. 计算举例
根据卡尔曼算法,预测方程为: ??[/1][1/1]x k k ax k k -=--预测误差方差为: 2 2 [/1][1/1]x x n P k k a P k k -=--+σ 卡尔曼增益为: () 1 22 22 22 [][/1][/1][1/1][1/1]x x x n x n K k P k k P k k a P k k a P k k -=--+σ --+σ=--+σ+σ ???[/][/1][]([][/1])??[1/1][]([][1/1])?(1[])[1/1][][]x k k x k k K k z k x k k ax k k K k z k ax k k a K k x k k K k z k =-+--=--+---=---+滤波方程:
()() 2 2222222 222 22 [/](1[])[/1] [1/1]1[1/1][1/1][1/1][1/1]x x x n x n x n x n x n P k k K k P k k a P k k a P k k a P k k a P k k a P k k =--??--+σ=---+σ ?--+σ+σ??σ--+σ = --+σ+σ 滤波误差方差 起始:?[0/0]0x =[0/0][0] x x P P =
卡尔曼滤波实验报告 捷联惯导静基座初始对准实验 一、实验目的 ①掌握捷联惯导的构成和基本工作原理; ②掌握捷联惯导静基座对准的基本工作原理; ③了解捷联惯导静基座对准时的每个系统状态的可观测性; ④了解双位置对准时系统状态的可观测性的变化。 二、实验原理 选取状态变量为:[]T E N E N U x y x y z X V V δδεεε=ψψψ??,其
中导航坐标系选为东北天坐标系,E V δ为东向速度误差,N V δ为北向速度误差,E ψ为东向姿态误差角,N ψ为北向姿态误差角,U ψ为天向姿态误差角,x ?为东向加速度偏置,y ?为北向加速度偏置,x ε为东向陀螺漂移,y ε为北向陀螺漂移,z ε为天向陀螺漂移。则系统的状态模型为: X AX W =+ (1) 其中, 1112212211 12 1321222331323302sin 000002sin 000000000sin cos 0000sin 000000cos 0000000000000000000000000000000000000000000000000000 0L g C C L g C C L L C C C L C C C L C C C A Ω-? ? ??-Ω????Ω-Ω? ?-Ω????Ω=? ?????? ?????????? ? [00000]E N E N U T V V W W W W W W δδψψψ=,E D V W W δψ 为零均值高斯 白噪声,分别为加速度计误差和陀螺漂移的噪声成分,Ω为地球自转角速度,ij C 为姿态矩 阵n b C 中的元素,L 为当地纬度。 量测量选取两个水平速度误差:[ ]T E N Z V V δδ=,则量测方程为: 10000000000100000000E E N N V X V δηδη???? ??=+???????????? (2) 即Z HX η=+ 其中,H 为量测矩阵,[]T E N ηηη=为量测方程的随机噪声状态矢量,为零均值高 斯白噪声。 要利用基本卡尔曼滤波方程进行状态估计,需要将状态方程和量测方程进行离散化。 系统转移矩阵为: 2323/1111102!3!! n n k k k k k k n T T T I TA A A A n ∞ -----=Φ=++++=∑ (3)
人体解剖学实验教案 课程名称:人体解剖学 适用专业:生物科学四年本科 课程编号: 制定单位:生命科学学院 制定人员:朱道立 制定日期:2011.7 审定人: 南通大学生命科学学院
人体组织学与解剖学实验教案 <人体组织学与解剖学实验>教案 师:朱道立 授课对象:生物科学本科生 组织学与解剖学实验要求 严格遵守上课纪律,不迟到。 实验前要做好预习,并填好预习报告。 实验观察要求认真仔细,鼓励探索与讨论。 认真准备“课堂问答”,积极回答课堂提问。 实验报告:认真完成,按时上交,绘图用铅笔要有标注。 组长做好卫生安排,值日生自觉留下做好卫生工作。 标本、模型、装片要轻拿轻放,损坏要登记并按规定赔偿。 注意保持清洁,不乱扔垃圾和废品。
绘组织结构图: 单层柱状上皮多极神经元 课堂问答: 什么是上皮、内皮、间皮? 人血有哪些有形成分?光镜下怎样区分五种白细胞?
二运动系统实验 目的: 察骨的一般形态和结构 察人类骨骼的组成及其构造特点 过几个主要关节的观察,了解关节的基本结构 察骨骼肌形态及组成,了解各骨骼肌的名称和作用 用具: 镜 :人体全身骨骼标本、散骨。 :髋关节标本、肩关节标本、膝关节标本、肘关节标本、脊椎骨及关节标本、胸骨及关节标本、手关节标本、足关节标标本。 :肌肉模型 :骨、骨骼肌(猪) 步骤: 骼 骨形态、构造和成分: :长、短、扁、不规则骨 :骨膜、骨质、骨髓 :有机物,无机物 脊柱: :椎体、椎弓、椎孔、棘突、横突、上下关节突、椎间孔。 :颈椎7、胸椎12、腰椎5、骶椎1、尾椎1。 :椎间盘、关节突关节、韧带。 特征观察 胸廓: 椎、12对肋骨、1胸骨。 颅骨: 8块,面颅15块。 上肢骨及连接 带骨:锁骨、肩胛骨 上肢骨:肱骨、尺骨、桡骨、腕骨、掌骨、指骨。 :肩关节、肘关节。 下肢骨及连接 下肢带骨:髋骨 下肢骨:股骨、髌骨、胫骨、腓骨、跗骨、跖骨、趾骨 :髋关节、膝关节、骨盆、足弓。 骼肌 肌的形狀和结构 结构可分为肌腹和肌腱(由胶原纤维构成)。 长、短、扁、轮匝肌;有二腹肌、二头肌。 肌的辅助装置 筋膜浅筋膜(皮下筋膜)、深筋膜(固有筋膜)
解剖牛实验报告-
金山学院课程实习报告报告题目《小牛活体解剖课程实习》课程名称《家畜解剖学》 实习地点动物医学家畜解剖实验室实习时间 专业动物医学班 年级 学生姓名 学号 指导老师
(一).实验目的、要求 一、实习目的: 通过活体家畜的解剖活动,使理论联系实践,做到复习和巩固一个学期以来所学到的家畜解剖学的基本知识,并进一步掌握不同家畜品种的各系统器官的解剖结构特点和练习家畜解剖的操作技能和方法,从而为后期有关课程和为将来畜牧生产服务打下良好的基础。 二、实习要求: (一)按照本实习指导书的指导方法和参考教材有关内容与插图,边解剖边观察,认识和掌握各器官的位置、色泽、形态、硬度和结构以及各器官之间的相互关系。 (二)认真做好观察记录,记录要详细,必要时可以绘图或照相。 (三)做到分工明确,各尽其责,团结互助,听从指挥,严守课堂纪律。 (四)总结讨论,认真写好实习报告,按时缴交。 (二).家畜品种:牛 性别:母
年龄:未知 活重:59斤 放血后重:56斤 (三).解剖程序和观察内容 1.活体观察 毛色:褐色前后关节:健全蹄着地情况:正常 观察巩膜为白色,瞳孔为椭圆形,眼结膜粉红色、正常 健康状况:良好叫声:小声,嘶哑鼻镜:湿润眼神:呆滞呼吸时胸部起伏情况:较大 2.活体触摸 左手抓住鼻梁和颊部,右手抓住下颌,用劲拉开口腔(用两指伸入齿间缘,用力往下压)拉出舌头。观察口腔粘膜和舌粘膜的眼神是正常的。呈粉红色。 用手触摸肩前淋巴结、髂下淋巴结 用手触摸肋骨、肋间隙、髋结节、坐骨结节、髋关节、肩关节 触摸乳房,乳头两个 触摸关节和蹄部 触摸喉头、气管,按压颈静脉沟后部,颈静脉怒胀彭起 3.处死 磨刀,绑定,称重。
小学科学四年级下册实验操作(教科版)1.体验静电现象(P2)实验目的:让学生亲身体验静电现象 实验原理带同种电荷的物体相互排斥,带异种电荷的物体相互吸引实验器材:塑料梳子或笔、碎纸屑 、用梳过干燥头发的塑料梳子慢慢接近碎纸屑,观察有什么现象发1操作步骤:生。 、用梳过干燥头发的塑料梳子再一次靠近头发,观察有什么现象发2生。实验结论:带电体能吸引轻小物体。 实验名称2 ;不一样的电荷实验目的:认识正电荷和负电荷实验器材:气球、羊毛制品、木尺 1 将两个充气气球挨着悬挂在约米长的木尺,用羊毛制品分别摩擦步骤: 两个气球相互接触部位,观察有什么现象发生实验结论:同种电荷相互排斥,异种电荷相互吸引
3实验名称:小灯泡的构造实验目的了解小灯泡的构造是怎样的实验器材小灯泡实验步骤展示小灯泡,让学生看清灯泡的构成实验结论小灯泡是由玻璃泡、灯丝、金属架、连接点构成的 4 让小灯泡发光(P5)实验目的:利用电来点亮小灯泡实验原理只有电流通过灯丝时小灯泡才会发光 实验器材:导线 1 根、电池 1 节、小电珠 1 个。实验步骤:选择连接方式使小灯泡发光。 1、导线连接小灯泡的螺纹与电池底部的锌壳,电池铜帽与小灯泡的锡粒接触,观察现象。 、导线连接小灯泡的锡粒与电池底部的锌壳,电池铜帽与小灯泡螺纹接触,2观察现象。 、导线连接电池铜帽与小灯泡螺纹,小灯泡的锡粒与电池底部的锌壳接触,3观察现象。 、整理器材。4实验结论:小灯泡亮了。 (P7)连接带灯座的电路5 实验目的:连接带灯座的电路,让小灯泡亮起来一段导线和一节电池能点亮一个小灯泡实验原理根。1 实验材料:小灯
泡、小灯座、电池、电池盒各个、导线 2 实验步骤:组装电路、在电池盒的两端各连接好一根导线,把电池正确安装在电池盒里。1 2、用连接电池的两根导线的另一端接触小灯泡,确定能使小灯泡发光。 3、将小灯泡安装在灯座上,再连接上导线---小灯泡亮了。 4、拆分器材 5、整理器材。 6 连接串联电路p8实验目的:会使用串联方法连接电路实验原理;串联是电路的一种连接方式 实验器材:电池、电池盒、灯泡、灯座各2 个、导线 4 根。操作步骤: 1、把电池装入电池盒里,把灯泡装在灯座上。 2、用导线把电池、灯泡、逐个串接法连起来。使2个小灯泡同时亮起来。 3、拆分器材 4、整理器材。实验结论:串联是电路的一种连接方式。 7 连接并联电路p8实验目的:会使用并联方式连
LMS 自适应滤波实验报告 姓名: 学号: 日期:2015.12.2 实验内容: 利用自适应滤波法研究从宽带信号中提取单频信号的方法。 设()()()()t f B t f A t s t x 212cos 2cos π?π+++=,()t s 是宽带信号,A ,B ,1f ,2f , ?任选 (1)要求提取两个单频信号; (2)设f f f ?+=12,要求提取单频信号()t f 22cos π,研究f ?的大小对提取单频信号的影响。 1. 自适应滤波器原理 自适应滤波器理论是现代信号处理技术的重要组成部分,它对复杂信号的处理具有独特的功能。自适应滤波器在信号处理中属于随机信号处理的范畴。在一些信号和噪声特性无法预知或他们是随时间变化的情况下,自适应滤波器通过自适应滤波算法调整滤波器系数,使得滤波器的特性随信号和噪声的变化,以达到最优滤波的效果,解决了固定全系数的维纳滤器和卡尔曼滤波器的不足。 (1) 自适应横向滤波器 所谓自适应滤波,就是利用前一时刻已获得的滤波器参数等结果,自动调节现时刻的滤波器参数,以适应信号和噪声未知或随时间变化的统计特性,从而实现最优滤波。自适应滤波器由两个部分组成:滤波器结构和调节滤波器系数的自适应算法。自适应滤波器的特点是自动调节自身的冲激响应,达到最优滤波,此算法适用于平稳和非平稳随机信号,并且不要求知道信号和噪声的统计特性。 一个单输入的横向自适应滤波器的原理框图如图所示:
实际上这种单输入系统就是一个FIR 网络结构,其输出()n y 用滤波器单位脉冲响应表示成下式: ()()()∑-=-=1 N m m n x m w n y 这里()n w 称为滤波器单位脉冲响应,令:()()n i n x x i w w m i i i ,1,1,1+-=-=+=用j 表示,上式可以写成 ∑==N i ij i j x w y 1 这里i w 也称为滤波器加权系数。用上面公式表示其输出,适用于自适应线性组合器,也适用于FIR 滤波器。将上式表示成矩阵形式: X W W X j T T j j y == 式中 [][ ] T Nj j j j T N x x x w w w X W ,...,,, ,...,,2121== 误差信号表示为 X W j T j j j j d y d e -=-= (2) 最小均方(LMS )算法 Widrow 等人提出的最小均方算法,是用梯度的估计值代替梯度的精确值,这种算法简单易行,因此获得了广泛的应用。 LMS 算法的梯度估计值用一条样本曲线进行计算,公式如下:
竭诚为您提供优质文档/双击可除 人体躯干骨实验报告 篇一:人体解剖学实验报告指导 实验报告 实验课的目的及要求 系统解剖学是研究正常人体形态结构的科学。本实验课的目的是通过观察标本模型,使学生掌握掌握人体九大系统器官的形态结构及功能,巩固解剖学基本理论和基本知识,从而培养学生的观察能力和思维能力,自学、表达和分析解决问题的能力。因此,要求学生: 1.重视实验课,实验前仔细阅读实验指导,了解实验目的、方法及步骤并结合实验内容复习有关理论。 2.实验时要仔细观察、认真操作,并对观察结果进行思考。 如:(1)椎骨的形态特征? (2)各部椎骨的特殊结构? (3)椎间盘的结构及临床意义。 (4)脊柱的侧面的四个生理弯曲及意义。
3.实验后,认真整理实验物品,如有损坏及时交给实验老师。 班级: 组别: 日期: 实验指导教师: 实验室守则 1.遵守学习纪律,准时到达实验室。实验时因故外出或早退应向教师请假。 2.要严肃认真地进行实验,实验期间不得进行任何与实验无关的活动。 3.保持实验室安静,讲话要低声,不要影响其他人实验。 4.实验时严格遵守代教教师及课代表的指示。 实验内容 任务一观察躯干骨及其连结 一、实验指导 (一)实验目的 1.能在骨标本上说出躯干骨的组成,胸廓的组成。 2.能在骨标本上辨认椎骨、胸骨的形态结构。 3.能指出躯干骨的主要体表标志。 (二)实验器材 分离躯干骨标本完整脊柱和胸廓标本
(三)实验步骤 1.分组取标本 学生需提前分组,每组成员需按照课代表及组长的分配确定座位,未经代教教师允许不得擅自更换桌位。各组组长到课代表处领取骨标本,分发给每位组员作好记录以便回收。 2.保持安静,听代教教师讲解椎骨的一般结构和各部椎骨的特殊结构、脊柱和胸廓结构,然后组织学生进行观察,最后教师归纳总结。本过程要求学生要保持安静,如有问题等教师讲解完毕再行询问。 3.观察并记录结果每位同学需认真观察标本,结合理论知识理解椎骨的一般结构和各部椎骨的特殊结构、重点理解脊柱侧面观、椎间盘结构和胸骨角,最后绘图,书写实验报告。 4.还标本,打扫卫生实验完成后将标本还给组长或课代表,检查物品是否有损坏,如有问题及时向代教教师反映情况,按实验室相关规定提供赔偿。服从课代表分配搞好实验室卫生。 (四)实验内容 本实验主要是观察躯干骨的一般结构和特殊结构,观察躯干骨连接时,重点认识椎间盘的结构,椎骨间的韧带,脊柱侧面的生理弯曲和胸廓的组成及形态。认识胸骨角。 (五)实验结果
初中生物实验报告集团文件发布号:(9816-UATWW-MWUB-WUNN-INNUL-DQQTY-
八年级上册 1.观察人的血细胞涂片 目的:学习用显微镜观察血细胞,认识红细胞和白细胞的形态结构 仪器:人血细胞涂片、显微镜 步骤:1,取镜,对光 2,将装片置于载物台上 3,观察:先用低倍镜找到目标,转入高倍镜下观察 4,取下装片,收镜 现象: 结果:红细胞数量最多,呈圆饼状,个体较小;白细胞数量小,有细胞核,个体较大 2.观察小鱼尾鳍的血液流动 目的:了解血液在血管内的流动情况,根据血流速度、方向及血管粗细和分支情况区分动脉、静脉和毛细血管 原理:血液在尾鳍的流动情况为:动脉→毛细血管→静脉 仪器:培养皿、纱布、小金鱼、显微镜 步骤:1,用纱布包裹小鱼,只露出尾部,将小鱼放置于培养皿中,使尾鳍平铺在培养皿底部。 2,将培养皿放在载物台上,是通光孔正对小鱼尾鳍,用低倍镜观察尾鳍内的血管及血液在血管内的流动情况 现象:血管的粗细不同,血液在血管内沿着一个方向流动,最细的血管,血流速度最慢 结果:血液在尾鳍的流动情况为:动脉→毛细血管→静脉 3.观察植物叶表皮气孔 目的:观察气孔的结构,认识气孔的作用 仪器:蚕豆叶、镊子、载玻片、盖玻片、培养皿、刀片、解剖针
步骤:1,制作叶表皮的临时装片:取蚕豆叶,把叶片的背面向里折,丛折断处轻轻撕拉,折断处的白色薄膜就是叶的表皮。用镊子取一小片薄膜,放在载玻片的水滴中,用解剖针把他摊平,盖上盖玻片。2,低倍镜观察叶表皮:将临时装片放在载物台上,使用低倍镜观察现象:除了看到许多形状不规则的绿色细胞外,还可以看到成对的半月形的细胞,以及由它们的间隙形成的圆孔。 结果:植物叶表皮存在气孔,气孔由两个半月形的细胞构成 4.测定植物蒸腾作用 目的:通过实验,学习绿叶是植物进行蒸腾作用的器官 仪器:锥形瓶、塑料袋、新鲜树枝、水、食用油 步骤:1,取两个锥形瓶,标号A、B,向瓶内注入等体积的水,瓶口处倒入一层食用油 2,取两根相似的树枝,将其中一根叶子去掉,插入A瓶,另一根不做处理,插入B瓶。3,两组实验均套上塑料袋,一小时后进行观察。 现象:A组塑料袋上没有水蒸气,B组塑料袋上出现出水蒸气 结果:植物通过叶片发生蒸腾作用,将水分排出体外 .5..验证绿叶在光下吸收二氧化碳 目的:通过实验,证明绿色植物在进行光合作用时,需要吸收二氧化碳作为原料 原理:绿色植物利用太阳提供的光能,把二氧化碳和水转变成有机物,同时释放出氧气 仪器:广口瓶、导管、橡皮塞、凡士林、小盆植物 步骤:1,取三只大广口瓶,分别标号A、B、C。在A、B中各放一盆枝叶茂盛的植物,C瓶内放无植物的花盆。通过导管分别向各瓶中深吐气十余次,使瓶中含有大量的二氧化碳。用凡士林封口。 2,将A放入黑暗中,B、C放在阳光下。2小时后,向A、B、C三瓶中分别滴入一些澄清石灰水,观察各瓶内澄清石灰水的变化情况。 现象:A:浑浊;B:澄清;C:浑浊
卡尔曼,美国数学家和电气工程师。1930年5月 19日生于匈牙利首都布达佩斯。1953年在美国麻省理工学院毕业获理学士学位,1954年获理学硕士学位,1957年在哥伦比亚大学获科学博士学位。1957~1958年在国际商业机器公司(IBM)研究大系统计算机控制的数学问题。1958~1964年在巴尔的摩高级研究院研究控制和数学问题。1964~1971年到斯坦福大学任教授。1971年任佛罗里达大学数学系统理论研究中心主任,并兼任苏黎世的瑞士联邦高等工业学校教授。1960年卡尔曼因提出著名的卡尔曼滤波器而闻名于世。卡尔曼滤波器在随机序列估计、空间技术、工程系统辨识和经济系统建模等方面有许多重要应用。1960年卡尔曼还提出能控性的概念。能控性是控制系统的研究和实现的基本概念,在最优控制理论、稳定性理论和网络理论中起着重要作用。卡尔曼还利用对偶原理导出能观测性概念,并在数学上证明了卡尔曼滤波理论与最优控制理论对偶。为此获电气与电子工程师学会(IEEE)的最高奖──荣誉奖章。卡尔曼著有《数学系统概论》(1968)等书。 什么是卡尔曼滤波 最佳线性滤波理论起源于40年代美国科学家Wiener和前苏联科学家Kолмогоров等人的研究工作,后人统称为维纳滤波理论。从理论上说,维纳滤波的最大缺点是必须用到无限过去的数据,不适用于实时处理。为了克服这一缺点,60年代Kalman把状态空间模型引入滤波理论,并导出了一套递推估计算法,后人称之为卡尔曼
滤波理论。卡尔曼滤波是以最小均方误差为估计的最佳准则,来寻求一套递推估计的算法,其基本思想是:采用信号与噪声的状态空间模型,利用前一时刻地估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。它适合于实时处理和计算机运算。 卡尔曼滤波的实质是由量测值重构系统的状态向量。它以“预测—实测—修正”的顺序递推,根据系统的量测值来消除随机干扰,再现系统的状态,或根据系统的量测值从被污染的系统中恢复系统的本来面目。 释文:卡尔曼滤波器是一种由卡尔曼(Kalman)提出的用于时变线性系统的递归滤波器。这个系统可用包含正交状态变量的微分方程模型来描述,这种滤波器是将过去的测量估计误差合并到新的测量误差中来估计将来的误差。 卡尔曼滤波的应用 斯坦利.施密特(Stanley Schmidt)首次实现了卡尔曼滤波器.卡尔曼在NASA埃姆斯研究中心访问时,发现他的方法对于解决阿波罗计划的轨道预测很有用,后来阿波罗飞船的导航电脑使用了这种滤波器. 关于这种滤波器的论文由Swerling (1958), Kalman (1960)与 Kalman and Bucy (1961)发表.
LMS 自适应滤波实验报告 : 学号: 日期:2015.12.2 实验容: 利用自适应滤波法研究从宽带信号中提取单频信号的方法。 设()()()()t f B t f A t s t x 212cos 2cos π?π+++=,()t s 是宽带信号,A ,B ,1f ,2f , ?任选 (1)要求提取两个单频信号; (2)设f f f ?+=12,要求提取单频信号()t f 22cos π,研究f ?的大小对提取单频信号的影响。 1. 自适应滤波器原理 自适应滤波器理论是现代信号处理技术的重要组成部分,它对复杂信号的处理具有独特的功能。自适应滤波器在信号处理中属于随机信号处理的畴。在一些信号和噪声特性无法预知或他们是随时间变化的情况下,自适应滤波器通过自适应滤波算法调整滤波器系数,使得滤波器的特性随信号和噪声的变化,以达到最优滤波的效果,解决了固定全系数的维纳滤器和卡尔曼滤波器的不足。 (1) 自适应横向滤波器 所谓自适应滤波,就是利用前一时刻已获得的滤波器参数等结果,自动调节现时刻的滤波器参数,以适应信号和噪声未知或随时间变化的统计特性,从而实现最优滤波。自适应滤波器由两个部分组成:滤波器结构和调节滤波器系数的自适应算法。自适应滤波器的特点是自动调节自身的冲激响应,达到最优滤波,此算法适用于平稳和非平稳随机信号,并且不要求知道信号和噪声的统计特性。
一个单输入的横向自适应滤波器的原理框图如图所示: 实际上这种单输入系统就是一个FIR 网络结构,其输出()n y 用滤波器单位脉冲响应表示成下式: ()()()∑-=-=1 N m m n x m w n y 这里()n w 称为滤波器单位脉冲响应,令: ()()n i n x x i w w m i i i ,1,1,1+-=-=+=用j 表示,上式可以写成 ∑==N i ij i j x w y 1 这里i w 也称为滤波器加权系数。用上面公式表示其输出,适用于自适应线性组合器,也适用于FIR 滤波器。将上式表示成矩阵形式: X W W X j T T j j y == 式中 [][ ] T Nj j j j T N x x x w w w X W ,...,,, ,...,,2121== 误差信号表示为 X W j T j j j j d y d e -=-= (2) 最小均方(LMS )算法 Widrow 等人提出的最小均方算法,是用梯度的估计值代替梯度的精确值,这种算法简单易行,因此获得了广泛的应用。
人体实验报告 篇一:人体尺寸实验报告 实验报告 一、实验目的 通过课桌椅设计,切实感受和认识人的因素在产品设计中的重要性,初步领会在产品设计中正确处理人的因素的方法。 同时了解座椅与人体骨骼结构、血液循环、体压、肌肉、神经等生理解剖因素的关系,以及怎么样才能设计符合人体生理解剖要求的课桌椅。 二、实验要求 通过对人体测量部分知识的复习,并对如何进行正确的人体测量,以及各种测量工具使用的介绍,要求学生全面掌握人体测量的正确方法并熟练运用到设计中。利用已掌握的正确人体测量方法,运用相应的测量工具,3-5人一组,完成个人数据的测量,并对如何进行课桌椅的设计展开初步的方案思考。 三、实验步骤: 1、认识测量工具 测量中所需仪器:人体侧高仪、人体测量用直角规、人体测量用弯角规、软卷尺 A、人体侧高仪 技术标准:国标GB5704.1-85
适用范围:适用于读数为1mm,测量范围为0-1996mm人体高度尺寸的测量 B、人体测量用直脚规技术标准:国标GB5704.2-85 适用范围:适用于读数为1mm和0.1mm,测量范围为0-200mm和0-250mm人体尺寸的测量 C、人体测量用弯脚规技术标准:国标GB5704.3-85 适用范围:适用于读数为1mm,测量范围为0-300mm的人体尺寸的测量 2、介绍人体测量方法 1)测量条件 本标准所规定的测量方法,只有在被测者姿势、测量基准面和其他测量条件符合下列要求的前提下始有效。 1.1 基本姿势 1.1.1 直立姿势(简称:立姿)被测者挺胸直立,头部以眼耳平面定位,眼睛平视前方,肩部放松,上肢自然下垂,手伸直,手掌朝向体侧,手指轻贴大腿侧面,膝部自然伸直,左、右足后跟并拢,前端分开,使两足大致呈45°夹角,体重均匀分布于两足。为确保直立姿势正确,被测者应使足后跟、臀部和后背部与同一铅垂面相接触。(内容可略) 1.1.2 坐姿被测者挺胸坐在被调节到腓骨头高度的平面上,头部以眼耳平面定位,眼睛平视前方,左、右大腿大致平行,膝大致弯屈成直角,足平放在地面上,手轻放在大腿上。为确保坐姿正确,被测者的臀部、后背部应同时靠在
报告编号:YT-FS-6542-21 关于鸡解剖实验报告(完 整版) After Completing The T ask According To The Original Plan, A Report Will Be Formed T o Reflect The Basic Situation Encountered, Reveal The Existing Problems And Put Forward Future Ideas. 互惠互利共同繁荣 Mutual Benefit And Common Prosperity
关于鸡解剖实验报告(完整版) 备注:该报告书文本主要按照原定计划完成任务后形成报告,并反映遇到的基本情况、实际取得的成功和过程中取得的经验教训、揭露存在的问题以及提出今后设想。文档可根据实际情况进行修改和使用。 一、实验名称:鸡的解剖 二、试验时间:20xx年12月12日 三、实验地点:动医楼 四、使用器械:镊子(不带齿)、手术刀、手术剪 五、解剖程序:首先把鸡处死,方法是:在鸡的颈部靠近头处开口放血致死;然后解剖 六、观察内容 1. 嗉囊:食管的膨大部,位于叉骨之前,直接在皮下,偏右 2. 腺胃:纺锤形,在肝左右两叶之间的背侧 3. 肌胃:紧接与腺胃,近圆形,呈暗红色 4. 十二指肠:位于腹腔右侧,前端与肌胃相接,
灰白色,管状 5. 空肠:前接十二指肠,后接回肠,灰白色,管状 6. 回肠:前接空肠,后接结直肠,夹在两条盲肠之间,灰白色,管状 7. 结直肠:很短,前接回肠 8. 胰腺:夹在十二指肠降升支之间,淡黄色,长条形 9. 肝:位于腹腔前下部,暗褐色,分左右两叶,右叶有一绿色胆囊 10. 法氏囊:位于鸡的泄殖腔的背侧,是泄殖腔的一个盲囊 11. 气管:较长而粗,半透明管状,位于皮下,偏右,进入胸腔在心基上方分为两个支气管 12. 鸣管:位于气管与支气管交叉处,分外鸣膜和内鸣膜,禽类的发声器官 13. 肺:位于胸腔背侧,扁平四方形 14. 心脏:位于胸腔前下方,心基朝向前方,椎
卡尔曼滤波实验报告
2014 年 4 月 GPS 静/动态滤波实验 一、实验要求 1、分别建立GPS 静态及动态卡尔曼滤波模型,编写程序对静态和动态GPS 数据进行Kalman 滤波。 2、对比滤波前后导航轨迹图。 3、画出滤波过程中估计均方差(P 阵对角线元素开根号)的变化趋势。 4、思考:① 简述动态模型与静态模型的区别与联系;② R 阵、Q 阵,P0阵的选取对滤波精度及收敛速度有何影响,取值时应注意什么;③ 本滤波问题是否可以用最小二乘方法解决,如果可以,请阐述最小二乘方法与Kalman 滤波方法的优劣对比。 二、实验原理 2.1 GPS 静态滤波 选取系统的状态变量为[ ]T L h λ=X ,其中L 为纬度(deg),λ为经度(deg),h 为高度 (m)。设()w t 为零均值高斯白噪声,则系统的状态方程为: 310()w t ?=+X (1) 所以离散化的状态模型为: ,111k k k k k W ---=+X X Φ (2) 式中,,1k k -Φ为33?单位阵,k W 为系统噪声序列。 测量数据包括:纬度静态量测值、经度静态量测值和高度构成31?矩阵Z ,量测方程
可以表示为: k k k Z HX V =+ (3) 式中,H 为33?单位阵,k V 为量测噪声序列。 系统的状态模型是十分准确的,所以系统模型噪声方差阵可以取得十分小,取Q 阵零矩阵。 系统测量噪声方差阵R 由测量确定,由于位置量测精度为5m ,采用克拉索夫斯基地球椭球模型,长半径e R 为6378245m ,短半径p R 为6356863m 。所以R 阵为: 2 2 25180()0 05180 ( )0cos()00 5p e R R L ππ ??? ?? ? ??= ??? ? ? ?? ? R (4) 2.2 GPS 动态滤波 动态滤波基于当前统计模型,在地球坐标系下解算。选取系统的状态变量为 T x x x y y y z z z X x v a y v a z v a εεε??=??,其中,,,x x x x v a ε依次为地球坐标系下x 轴上的位置、速度、加速度和位置误差分量,,y z 轴同理。系统的状态模型可以表示为: ()()()()t t t t =++X AX U W (5) 式中,位置误差视为有色噪声,为一阶马尔科夫过程,可表示为: x x x x y y y y z z z z w w w εετεετεετ?=-+????=-+????=-+?? 1 11 (6) 其中,i τ(,,i x y z =)为对应马尔科夫过程的相关时间常数,(,,)i w i x y z =为零均值高斯白噪声。
鸡的解剖实验报告 专业:动物医学年级:2015 姓名:王涛学号:86150233 一、实验日期:2016年12月12日 小组成员:张建刚、冯洋、李金霞 二、实验目的 1、通过对鸡的骨骼和肌肉的观察,认识禽类动物的基本生活习性和主要特征。 2、通过对鸡的内部结构解剖和观察,认识鸟类的各个基本器官以及系统的基本结 构,并发现鸟类适应飞翔生活的主要特征。 3、通过对鸡的解剖操作,掌握解剖鸟类的基本技术和方法。 三、实验内容 1、观察鸡的外形结构,了解鸡的基本生活习性。 2、打开胸腔和腹腔,观察各个器官,并能准确找出器官所在的位置。 四、实验器材 手术盘、剪刀、一只已经处死并脱毛的健康鸡五、实验步骤和观察内容 (一)、观察外形结构: 背面腹面
脱毛后的外形特征:头部、颈部、躯干部、四肢容易区分,尾部明显退化,皮肤薄 且松,皮肤腺体不发达。前肢特化为翼,后肢具有四趾,趾间无蹼。 (二)、外形基本观察结束后,用剪刀沿着鸡的大腿内侧剪开,如图所示;把鸡腿给打开后沿着腹侧的肛门正上方无骨处 剪开,打开腹腔,观察其内部结构; 在打开腹腔之后,大概观察了各个器官的具 体位置和形态,然后在进一步观察其结构; 1、十二指肠:位于腹腔右侧,前端与肌胃相接,灰白色,管状 心脏 泄殖腔 气囊 空回肠 剪开位置
2、胰腺:夹在十二指肠降升支之间,淡黄色,长条形 十二指肠 胰腺 盲肠 十二指肠 空肠 结直肠 输卵管 回肠 泄殖腔 肛门
3、结直肠:很短,前接回肠 4、空肠:前接十二指肠,后接回肠,灰白色,管状 5、回肠:前接空肠,后接结直肠,夹在两条盲肠之间,灰白色,管状 6、输卵管:分为:漏斗部,壶腹部,峡部,子宫,阴道五部分 观察完肠管之后,开始观察内脏各个器官的形态特征,然后从咽喉部剪开,找出气管和食管,观察软骨等结构; 7、肺:位于胸腔背侧,扁平四方形 8、肝:位于腹腔前下部,暗褐色,分左右两叶,右叶有一绿色胆囊
卡尔曼滤波实验报告 2014 年 4 月 GPS静/动态滤波实验 一、实验要求 1、分别建立GPS静态及动态卡尔曼滤波模型,编写程序对静态和动态GPS数据进行Kalman滤波。 2、对比滤波前后导航轨迹图。
3、画出滤波过程中估计均方差(P 阵对角线元素开根号)的变化趋势。 4、思考:① 简述动态模型与静态模型的区别与联系;② R 阵、Q 阵,P0阵的选取对滤波精度及收敛速度有何影响,取值时应注意什么;③ 本滤波问题是否可以用最小二乘方法解决,如果可以,请阐述最小二乘方法与Kalman 滤波方法的优劣对比。 二、实验原理 2.1 GPS 静态滤波 (deg) 度(m) (1) 所以离散化的状态模型为: (2) 可以表示为: (3) 矩阵。 5m ,采用克拉索夫斯基地球 6378245m 6356863m (4) 2.2 GPS 动态滤波 动态滤波基于当前 统计模型,在地球坐标系下解算。选取系统的状态变量为 (5)
式中,位置误差视为有色噪声,为一阶马尔科夫过程,可表示为: ε τεετεετ-=- =-1 1 (6) 白噪声。 (7) (8) 系统噪声为: (9) 量测量为纬度动态量测值、经度动态量测值、高度和三向速度量测值。由于滤波在地球 坐标系下进行,为了简便首先将纬度、经度和高度转化为三轴位置坐标值,转化方式如下: (10) 量测方程为: (11)
综上,离散化的Kalman滤波方程为: (12) 离散化的系统噪声协方差阵为: 2 [ π ?] ? k x = +<0 “当前”加速度 (13) 离散化量测噪声协方差阵为:diag = R 三、实验结果 3.1 GPS静态滤波
卡尔曼滤波与组合导航》课程实验报告 实验 捷联惯导 /GPS 组合导航系统静态导航实验 实验序号 3 姓名 陈星宇 系院专业 17 班级 ZY11172 学号 ZY1117212 日期 2012-5-15 指导教师 宫晓琳 成绩 、实验目的 ① 掌握捷联惯导 /GPS 组合导航系统的构成和基本工作原理; ②掌握采用卡尔曼滤波方法进行捷联惯导 /GPS 组合的基本原理; ③掌握捷联惯导 /GPS 组合导航系统静态性能; ④了解捷联惯导 /GPS 组合导航静态时的系统状态可观测性; 、实验原理 ( 1)系统方程 X FX GW 系统噪声矢量由陀螺仪和加速度计的随机误差组成,表达式为: 2)量测方程 和 H 分别为捷联解算与 GPS 的东向速度、北向速度、天向速度、纬度、经度和高度之 差;量测矩阵 H H V H P T ,H P 03 6 diag R M H, (R N H )cos L, 036 , H V 033 diag 1, 1, 1 039 ,v v V E v V N v V U v L v v H 为量测噪声。 量测噪声 v E v N T v U L h x y z x y z 其中, E 、 N 、 U 为数学平台失准角; v E 、 v N 、 v U 分别为载体的东向、北向和天向速度误差; L 、 、 h 分别为纬度误差、经度误差和高度误差; x 、 y 、 z 、 x 、 y 、 z 分别为陀螺随 机常值漂移和加速度计随机常值零偏。(下 标 系统的噪声转移矩阵 G 为: E 、N 、 U 分别代表东、北、天) C b n 3 3 0 9 3 3 3 C n C b 9 3 15 6 系统的状态转移矩阵 w w w w F 组成内容为: w z F 06N 9 F S F M ,其中 F N 中非零元素为可由惯导误差模型获得。 F S C b n 3 3 0 3 3 3 3 C b n 3 3 96 量测变量 z V E V N V U L H , , V E 、 V N 、 V U 、 L 、 X U
实验报告 一、实验名称:鸡的解剖 二、试验时间:2012年12月12日 三、实验地点:动医楼 四、使用器械:镊子(不带齿)、手术刀、手术剪 五、解剖程序:首先把鸡处死,方法是:在鸡的颈部靠近头处开口 放血致死;然后解剖 六、观察内容 1.嗉囊:食管的膨大部,位于叉骨之前,直接在皮下,偏右 2.腺胃:纺锤形,在肝左右两叶之间的背侧 3.肌胃:紧接与腺胃,近圆形,呈暗红色 4.十二指肠:位于腹腔右侧,前端与肌胃相接,灰白色,管状 5.空肠:前接十二指肠,后接回肠,灰白色,管状 6.回肠:前接空肠,后接结直肠,夹在两条盲肠之间,灰白色,管 状 7.结直肠:很短,前接回肠 8.胰腺:夹在十二指肠降升支之间,淡黄色,长条形 9.肝:位于腹腔前下部,暗褐色,分左右两叶,右叶有一绿色胆囊 10.法氏囊:位于鸡的泄殖腔的背侧,是泄殖腔的一个盲囊 11.气管:较长而粗,半透明管状,位于皮下,偏右,进入胸腔在心 基上方分为两个支气管 12.鸣管:位于气管与支气管交叉处,分外鸣膜和内鸣膜,禽类的发
声器官 13.肺:位于胸腔背侧,扁平四方形 14.心脏:位于胸腔前下方,心基朝向前方,椎体形 15.肾:位于综荐股两旁和髂骨内面,红褐色 16.卵巢:位于左肾前部肾上腺的腹侧,上有发育着的大小不一的黄 色卵泡 17.输卵管:分为:漏斗部,壶腹部,峡部,子宫,阴道五部分 壶腹部:受精部位 壶腹部:产生蛋清的部位 峡部:形成蛋壳膜 子宫:形成蛋壳及其色素 阴道:在蛋壳外面形成少量灰质 18.髂腓肌:相当于臀股二头肌,位于髂骨脊,以圆腱止于腓骨 19.坐骨神经:位于髂腓肌下面,体内最粗大的神经,白色,线状 七、体会:通过这次解剖实验课,我对鸡的一些组织和器官有了一 定的了解,也掌握了相关的一些知识。最重要的是在上课的过程中体会到了乐趣。在外人看来也许解剖课很没意思,但在老师的讲解下,我们不仅掌握了知识,也获得了乐趣。 生物工程09级1班
病鸡的解剖实验报告 篇一:鸡解剖实验报告.doc 实验报告 一、实验名称:鸡的解剖 二、试验时间:XX年12月12日 三、实验地点:动医楼 四、使用器械:镊子(不带齿)、手术刀、手术剪 五、解剖程序:首先把鸡处死,方法是:在鸡的颈部靠近头处开口 放血致死;然后解剖 六、观察内容 1. 嗉囊:食管的膨大部,位于叉骨之前,直接在皮下,偏右 2. 腺胃:纺锤形,在肝左右两叶之间的背侧 3. 肌胃:紧接与腺胃,近圆形,呈暗红色 4. 十二指肠:位于腹腔右侧,前端与肌胃相接,灰白色,管状 5. 空肠:前接十二指肠,后接回肠,灰白色,管状 6. 回肠:前接空肠,后接结直肠,夹在两条盲肠之间,灰白色,管状 7. 结直肠:很短,前接回肠 8. 胰腺:夹在十二指肠降升支之间,淡黄色,长条形
9. 肝:位于腹腔前下部,暗褐色,分左右两叶,右叶有一绿色胆囊 10. 法氏囊:位于鸡的泄殖腔的背侧,是泄殖腔的一个盲囊 11. 气管:较长而粗,半透明管状,位于皮下,偏右,进入胸腔在心基上方分为两个支气管 12. 鸣管:位于气管与支气管交叉处,分外鸣膜和内鸣膜,禽类的发 声器官 13. 肺:位于胸腔背侧,扁平四方形 14. 心脏:位于胸腔前下方,心基朝向前方,椎体形 15. 肾:位于综荐股两旁和髂骨内面,红褐色 16. 卵巢:位于左肾前部肾上腺的腹侧,上有发育着的大小不一的黄色卵泡 17. 输卵管:分为:漏斗部,壶腹部,峡部,子宫,阴道五部分壶腹部:受精部位 壶腹部:产生蛋清的部位 峡部:形成蛋壳膜 子宫:形成蛋壳及其色素 阴道:在蛋壳外面形成少量灰质 18. 髂腓肌:相当于臀股二头肌,位于髂骨脊,以圆腱止于腓骨
卡尔曼滤波实验报告 2014 年4 月 GPS静/动态滤波实验 一、实验要求 1、分别建立GPS静态及动态卡尔曼滤波模型,编写程序对静态和动态GPS数据进行Kalman滤波。 2、对比滤波前后导航轨迹图。
3、画出滤波过程中估计均方差(P 阵对角线元素开根号)的变化趋势。 4、思考:① 简述动态模型与静态模型的区别与联系;② R 阵、Q 阵,P0阵的选取对滤波精度及收敛速度有何影响,取值时应注意什么;③ 本滤波问题是否可以用最小二乘方法解决,如果可以,请阐述最小二乘方法与Kalman 滤波方法的优劣对比。 二、实验原理 GPS 静态滤波 选取系统的状态变量为[ ]T L h λ=X ,其中L 为纬度(deg),λ为经度(deg),h 为高度(m)。设()w t 为零均值高斯白噪声,则系统的状态方程为: 31 0()w t ?=+&X (1) 所以离散化的状态模型为: ,111k k k k k W ---=+X X Φ (2) 式中,,1k k -Φ为33?单位阵,k W 为系统噪声序列。 测量数据包括:纬度静态量测值、经度静态量测值和高度构成31?矩阵Z ,量测方程 可以表示为: k k k Z HX V =+ (3) 式中,H 为33?单位阵,k V 为量测噪声序列。 系统的状态模型是十分准确的,所以系统模型噪声方差阵可以取得十分小,取Q 阵零矩阵。 系统测量噪声方差阵R 由测量确定,由于位置量测精度为5m ,采用克拉索夫斯基地球椭球模型,长半径e R 为6378245m ,短半径p R 为6356863m 。所以R 阵为: 22 25180()0 05180 ( )0cos()00 5p e R R L ππ ??? ?? ? ??= ??? ? ? ?? ? R (4) GPS 动态滤波 动态滤波基于当前统计模型,在地球坐标系下解算。选取系统的状态变量为 T x x x y y y z z z X x v a y v a z v a εεε??=??,其中,,,x x x x v a ε依次为地球坐标系下x 轴上的位置、速度、加速度和位置误差分量,,y z 轴同理。系统的状态模型可以表示为: ()()()()t t t t =++X AX U W & (5) 式中,位置误差视为有色噪声,为一阶马尔科夫过程,可表示为: