研究生课程考核试卷
(适用于课程论文、提交报告)
科目:齿轮啮合原理教师:林超
姓名:张清亮学号:20150713090 专业:车辆工程类别:车辆工程领域上课时间:2015 年9 月至2015 年11 月
考生成绩:
卷面成绩平时成绩课程综合成绩
阅卷评语:
阅卷教师(签名)
重庆大学研究生院制
一、基本概念(每题2分,共计20分)
1、解释齿廓渐屈线?
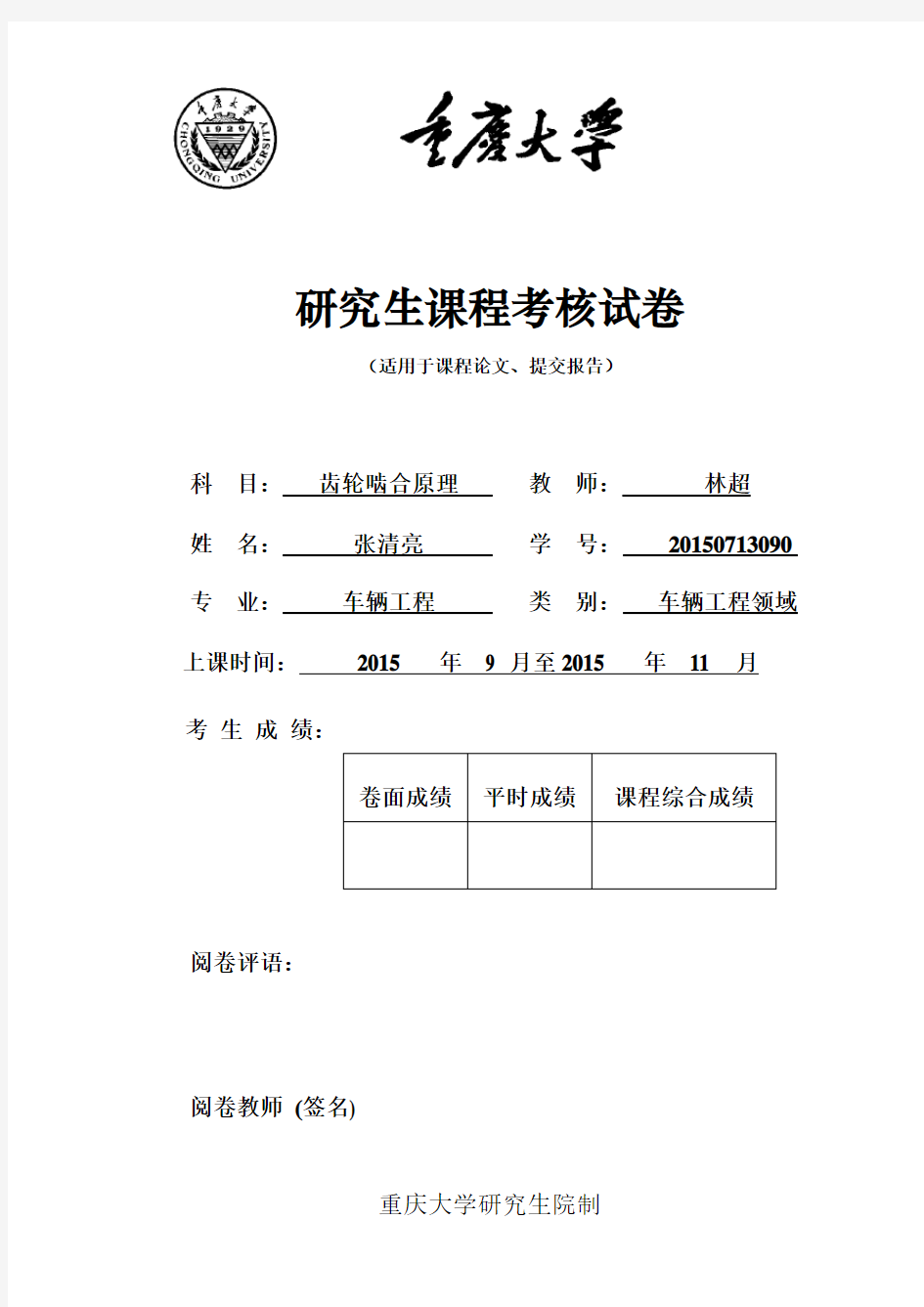
答:一条给定齿廓曲线的渐屈线是该齿廓曲线曲率中心的轨迹,也是该齿廓曲线密切圆圆心的轨迹(图 1.1)。齿廓曲线每一点的法线都和其渐屈线相切,因此,齿廓渐屈线也是齿廓法线族的包络。
在齿轮的瞬心线给出的情况下(图1.2),齿轮齿廓的渐屈线可由p r PC
=+确定,
式中p为齿廓渐屈线的径矢,r为瞬心线的径矢。PC的模l由下式确定:
sin()
1sin
PC l r
d
u
d
λμ
λ
φ
-
==
??
+
?
??
式中r r
=。在图1.10的直角坐标系中,齿廓的渐屈线方程为:
cos cos()
sin sin()
x r l
y r l
φφλ
φφλ
=++
?
?
=++
?
图1.1 齿廓的渐屈线图1.2 齿廓渐屈线坐标系本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
2、解释平面曲线的曲率?
答:在图1.3中,用s表示曲线的弧长。考察曲线上分别与s和s s
+?对应的两个相邻的点M和N,图1.3(a)。点M和N之间的弧长s?,而α
?是点M和N处的两条
切线之间的夹角。当点N趋近于点M时,比值
s
α
?
?
的极限称为曲线在点M处的曲率
(标记为K),即
lim
s
K
s
α
?→
?
=
?
。在
lim=
s
d
s ds
αα
?→
?
?
存在的条件下,
d
K
ds
α
=。比值
s
α
?
?
称为曲线在点M处的曲率半径(标记为
c
ρ),即=
c
s
ρ
α
?
?
,且
1
=
c K
ρ。这里的
c
ρ是极限(密切)圆的半径,极限圆是当两个相邻点N和'N趋近于点M时通过点M和该两个相邻点画出的,图1.3(b)。圆心C称为曲率中心。
图1.3 齿轮的瞬时回转轴
本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
3、解释齿轮的瞬时回转轴?
答:在平行轴或相交轴的齿轮副中,两齿轮作相对的瞬时回转运动的轴线,称为瞬时回转轴。在交错轴齿轮副中,两齿轮作相对的瞬时螺旋运动的轴线,也称为瞬时回转轴。如图1.4。
图1.4 齿轮的瞬时回转轴
本题参考文献:减速机信息网. 齿轮基本术语一般定义(GB/T3374-92)[EB/OL].
4、解释齿轮的瞬轴面? 答:图1.5表示回转运动在两个相交轴之间进行传递,两轴线Oa 和Ob 构成夹角
γ。两齿轮朝相反的方向转动,瞬时回转轴线OI 是齿轮1对齿轮2(或齿轮2对齿轮
1)相对运动中的角速度(12)
ωu v 的作用线,OI 相对于两齿轮轴线的方向用角1γ和2γ来确
定。瞬时回转轴在与回转齿轮i 刚性固接的动参考标架(1,2)i S i =中的轨迹构成瞬轴面。在两相交轴之间的回转运动进行传递的情况下,瞬轴面是两个顶角为1γ和2γ的圆锥。
图1.6中,两个构件分别以角速度(1)ωu v 和(2)
ωu v 绕两个相错轴转动,转动轴线构成相错角γ,两轴线之间的最短距离为E 。当构件1和2转动时,螺旋运动的瞬时轴线s s -在参考标架1和2中将形成两个曲面——回转双曲面。这样的曲面是在两相错轴之间传递回转运动情况下的瞬轴面,此时的瞬轴面是螺旋运动瞬时轴线在坐标系
(1,2)i S i =中形成的轨迹。
图1.5 瞬轴面:两相交轴之间的回转运动 图1.6 瞬轴面:两相错轴之间的回转运动
本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
5、解释共轭齿形?
答:在图1.7中Ⅰ、Ⅱ是两齿轮的瞬心线,1、2则是相应的一对齿形。齿轮传动过程中,两瞬心线作相对的纯滚动,两齿形则应时时保持相切接触(有相对滑动),它们常称为互相共轭的齿形或共轭齿形。
共轭齿形在传动的任一瞬时,它们在接触点的公法线必然通过该瞬时的瞬心点P 。P 点在联心线12O O 上,而
221
12112
=O P r i O P r ωω==。当传动比12i 是常值时,P 点在联心线12
O O 上的位置是固定的,因此,共轭齿形在接触点的公法线是通过一个定点(节点)P 的。
图1.7 共轭齿形
本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
6、解释短程线和曲面挠率?
答:如果曲线在其任一点M 的主法线与曲面在点M 的法线重合,或者曲面上的线是直线,则曲面上这样的线是短程。从这个定义得出,短程线在其任一点处的短程曲率等于零。
曲面的挠率可以解释为当一点沿短程线运动时,曲面的法面(该法面是通过短程线的切线引出的)进行扭转的程度。曲面的挠率对于在曲面的点M 彼此处于相切的整个曲线集合都是相同的。这些曲线中的一条是短程线,该线对于所考察的公共单位切线矢量是唯一的。这样,短程线的曲线挠率和任意一条与短程线相切的曲面曲线的曲面挠率是相同的。
本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
7、解释啮合面?
答:配对曲面1∑和2∑(图1.8)在每一个瞬时彼此沿着一条线相接触,该线称作瞬时接触线或者特征线。齿轮齿面上瞬时接触线的位置决定于运动参数φ。而啮合面是表示在与机架刚性固定坐标系f S 中的瞬时接触线族。啮合面用如下方程表示:(,,)(,,)0f f r r f μθφμθφ==v v 。式中11f f r M r =v v ,这里,44?矩阵1f M 描述1S 到f S 的坐标变换。
图1.8 齿面上的瞬时接触线
本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
8、解释不产生根切条件?
答:假定曲面1是用来加工齿轮齿面2的刀具齿面。曲面2上出现奇异点是齿面在加工过程中可能产生根切的一种警告。在加工过程中所出现的曲面2上的奇异性的数学解释,可以用方程0)2(=r
来说明,从该式可导出方程
0)
12()
1(=+r r
和啮合方程的微分式
0)],,([=φθu f dt
d
从而使我们在曲面1上确定出这样一条曲线L ,该线将形成曲面2上的奇异点。我们用曲线L 限定曲面1,可以避免在曲面2上出现奇异点,从而不产生根切。
本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
9、解释曲面族的包络存在的必要条件? 答:微分几何中提出的解法是用下列方程 0)(),,(2
22=????????=φ
θφθr r u r u f 给出包络面2存在的必要条件。
该方程将曲面1的曲线坐标),(θu 和广义运动参数φ加以联系。该方程是曲面族),,(22φθu =包络存在的必要条件。如果这个方程得到满足,并且包络确实存在的话,则包络在2S 中可以用联立方程0)(
),,(2
22=????????=φ
θφθu u f 和方程),,(22φθu =来
表示。这两个方程用三个相关的曲面参数),,(φθu 来表示包络。
本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
10、写出Euler 的方程式?
答:Euler 方程建立了曲面的法曲率和主曲率之间的关系,并且表示为
22
cos sin n K K q K q I =+Ⅱ。式中q 是由矢量MN u u u u v 和单位矢量e I v 构成的夹角(图1.9)。
矢量MN u u u u v
表示在曲面的切面上选取的方向,而n K 是曲面在这个方向上的法曲率。单
位矢量e I v 和e v
Ⅱ沿着两个主方向,而K I 和K Ⅱ是主曲率。
图1.9 矢量的分解
本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
二、 分析曲线和曲面(16分)
要求:自选曲线及曲面公式,采用微分几何理论,结合数学软件的方法; 1)自选曲线,并对曲线进行分析(建立坐标系、详细说明、作图分析及列出程序)。 答:对外摆线进行绘制。 外摆线 是所有形式为
的曲线,其中 n 为正实数。 Matlab 程序: t=0:pi/100:2*pi;
a=20;b=2;
x=(a+b)*cos(t)-b*cos((a+b)*t/b);
y=(a+b)*sin(t)-b*sin((a+b)*t/b);
plot(x,y);axis equal;
图形:
图2.1 外摆线
本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
2)自选曲面,并对曲面进行分析(建立坐标系、详细说明、作图分析及列出程序)。答:本题将对阿基米德螺旋面进行绘制
定义:动直线以恒定的角度与一条固定的直线(轴线)相交,并沿此轴线方向作等速移动时,又绕此轴线作等角速的旋转运动;此动直线在固定空间内的运动轨迹。
方程是:x=rcosθ;
y=rsinθ;
z=hθ/(2*pi);
化简计算,取r为1,h为2*pi。
图2.2 阿基米德正螺旋面Matlab程序如下:
h=2*pi;
[r,theta]=meshgrid(linspace(0,1,50),linspace(0,2*pi,500));
x=r.*cos(theta);
y=r.*sin(theta);
z=h*theta/2/pi;
surf(x,y,z);
shading interp
结果图形如下:
图2.3 阿基米德螺旋面
本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
三、 推导方程(1题10分,2题10分,共计20分)
1. 假定两齿轮绕两个平行轴线以相同的方向传递回转运动下图(图1)。坐标系
1S 和2S 刚性固接到两齿轮1和2;f S 和p S 是固定坐标系;E 是最短距离;1ρ和2ρ是齿轮两瞬心线的半径。
图1
推导:
1) 确定矩阵1
2112M M -=。
2) 从S 2到S 1的坐标变换方程。 3) 从S 1到S 2的坐标变换方程。
解:1) 易知,从2S 到1S 的坐标系变换是基于如下的矩阵方程:
1212122=f fp p r M r M M M r =v v v
(1) 式中1f M 和2p M 是转动矩阵,而fp M 是移动矩阵。这里
??
???
???????-=100
0010000cos sin 00sin cos 2
2
222
φφ
φφp M (2) ?
?
??????????-=1000
010000cos sin 00sin cos 11
111φφ
φφf
M (3) ??
???
????
???-=100
0100010
0001
E M fp (4) 从方程(2)、(3)、(4)可导出
?
??????
??
??
?------=10000
100cos 0)
cos()sin(sin 0
)sin()cos(12
1211212112φφφφφφφφφφE E M (5)
从1S 到2S 的坐标系变换是基于如下的矩阵方程:
1121212r M M M r M r f pf p == (6) 式p M 2中1f M 和是转动矩阵,而pf M 是移动矩阵。这里
??
???
???????-=100
010000cos sin 00sin cos 2
2
22
2φφ
φφp
M (7) ??
???
??
??
???-=1000
010000cos sin 00sin cos 1
1111φ
φφφf M (8)
?
?
???
????
???=10000100010
00
01E M pf (9)
从方程(7)、(8)、(9)可导出
?
????
?
?
??
??
?------=10000
100cos 0)
cos()sin(sin 0)sin()cos(22
1212212121φφφφφφφφφφE E M (10)
则,1
2112M M -=
2)利用方程(5),我们得到从S 2到S 1的坐标变换方程:
???
??=--+-=+---=212212212122122121sin )cos(
)sin(sin )sin()cos(
z z E y x y E y x x φφφφφφφφφφ (11) 3)利用方程(10),我们得到从S 1到S 2的坐标变换方程:
??
?
??=+-+--=--+-=122211211222112112sin )cos()sin(sin )sin()cos(z z E y x y E y x x φφφφφφφφφφ (12)
本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
2. 坐标系
,
和 分别与齿条刀具、被加工的直齿外齿轮和机架刚性固接
(图2)。齿条刀具的齿形是直线,该直线用方程
11sin cos x u y u α
α== (
)
表示在 中。这里,a 是齿形角(压力角);u 是变参数,该参数用来确定齿条刀具齿形上的流动点位置(对于点M ,
;对于点
,
)。瞬时回转中心为 。
齿轮的瞬心线是半径为r 的圆,而齿条刀具的瞬心线与 轴重合(图2)。齿条刀具的位移 和齿轮的转角 有如下关系式
s r φ
=
图2
求: 1)确定矩阵1
2112M M -=。
2)推导啮合方程。
3)导出齿条刀具和被加工齿轮在啮合中的啮合线方程。 4)导出被加工齿轮的齿形方程。
5)确定齿条刀具的极限安装位置,这种安装位置将使齿轮的被加工齿形避免根切,并作图说明。
解:1) 易知,从2S 到1S 的坐标系变换是基于如下的矩阵方程:
2212121r M M r M f f == (1) 式中2f M 是转动矩阵,而f M 1是移动矩阵。这里
??
???
???????-=100
010000cos sin 00sin cos 2
φφφφf M (2) ??
???????
???-=100
00100010
0011r r M f φ (3) 从方程(2)、(3)可导出
??
???????
???--=100
01000cos sin 0
sin cos 112r r M φφ
φφφ (4) 从1S 到2S 的坐标系变换是基于如下的矩阵方程:
1121212r M M r M r f f == (5)
式f M 2是转动矩阵,而1f M 是移动矩阵。这里
??
???
???????-=100
010000cos sin 00sin cos 2φφφφf
M (6) ?
?
???
????
???-=100
00100010
0011r r M f φ (7)
从方程(6)、(7)可导出
?
????
????
???+--=100
100)sin (cos 0cos sin )cos (sin 0sin cos 21φφφφ
φ
φφφφφr r M (8)
则,1
2112M M -=
2) 啮合方程可写成如下形式:
1111
11
0x y X x Y y N N ---= (9) 这里110X r Y φ
==,是表示在1S 中的I 的坐标。
[]111cos sin 0T N T k α
α
=?=-u u v u v u v
(10)
式中1T u v 和1N u u v 是产生齿形的切线矢量和法线矢量,1k u v
是1z 轴的单位矢量。 从上述方程可以导出啮合方程的下列表达式
(,)sin 0f r μφμφα=-= (11)
3) 啮合线方程可以表示为:
11
(,)sin 0
f f r M r f r μφμφα==-=v v
于是, sin cos sin 0
f f x r y r r μαφμαμφα=-??
=+??
-=?
从而可以得到啮合线方程如下,
2cos sin cos f f x r y r r φαφαα
=-=+ (12)
4) 被加工齿轮的齿形用下列方程表示
S1到S2的坐标变化:2121211=f f r M r M M r =v v v
(13)
啮合方程:
(,)sin 0f r μφμφα=-= (14)
式中 21cos sin (cos sin )=sin cos (sin cos )0
1r M r φ
φφφφφ
φφφφ-+???
?-+??????
(15)
方程(13)、(14)、(15)可以导出被加工齿轮齿形的下列表达式:
22sin()(sin cos )cos()(cos sin )sin 0x r y r r μφαφφφμφαφφφμφα=++-??
=+++??-=?
(16)
方程(16)用有联系的参数μ和φ以双参数形式表示被加工齿形(它是平面曲线)。 在这种特殊情况下,因为啮合方程对参数μ是线性的,所以能够从方程(16)中消去μ,并且以单参数形式将被加工齿形表示如下:
22sin cos cos()cos cos sin()x r r y r r φφαφαφφαφα=-+??=++? (17)
方程(17)表示一条渐开线,它对应半径为cos b r r α=的基圆。
5) 齿条刀具齿形的界限点是这样的点,它在齿轮的齿形上形成奇异点。齿条刀具的界限点可以用啮合方程(,)sin 0f r μφμφα=-=和根切方程(,)0F μφ=确定,后一方程可以用下面的方程求出
(12)(12)1
11
10x y x y v v u
u d d f f f f dt
dt
μ
φ
μ
φφφ????=
=
联系1112sin cos x y μαμαμμμ==-<<和
(12)(1)(2)11111111[()()]
cos cos 0sin (sin )0000v v v r i r R r r r r ωωωωωμαωωμαωμαωφωμαφ=-=--?+?---????????????????=---=-+????????????????????????
v v v v u v v u v u v
式中[]1T R r r
T φ=-u v
可以导出
(12)1
1
sin cos 01sin x x v u
r d f f dt
μφ
αωμα
ωα
φ
??=
=-
这样,我们得到μ的界限值为=tan sin r μαα-,进而我们得到
(12)1
1cos (sin )
01sin y y v r u
r d f f dt
μ
φαωμαφωα
φ?-+?=
=-
考虑到啮合方程(,)sin 0f r μφμφα=-=,我们得到与由方程=tan sin r μαα-给出的μ相同的界限值。
图3.1 齿条刀具的极限安装位置
上图说明了齿条刀具的极限安装位置,此时点F 形成齿轮齿形上的奇异点。点F 的参数μ是负的,并由方程=tan sin r μαα-确定。
本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008.
四、综述及分析?(30分)
采用齿轮啮合原理的基本理论和方法,结合工程实际及自己所选的研究题目,建立坐标系、理论推导、综合分析及齿轮啮合原理的应用。(编程设计、实体建模、运动分析、仿真分析等)等研究内容。
注意:1)论文拟写:按照“重庆大学”期刊论文发表格式。
2)引用的参考参考文献及资料需要注明。
根据自己所选的题目及所研究内容部分拟写论文,课程论文要求:
1.文献的综述,选题研究的国内外现状分析,选题研究目的及意义;
2.研究内容部分;
3.结论;
4.参考文献。
通过齿条刀具对齿轮廓形曲线方程的推导
摘要:本文根据齿轮啮合原理的相关知识,提出来一种通过齿条刀具得到齿轮廓形曲线方程的新方法。
关键词:齿轮啮合原理齿条刀具廓形曲线方程
Abstract:This paper proposes a new method to get gear pro equation according to the principle of gear meshing.
Key words:Gear engagement principle Rack cutter Pro equation
1、引言
随着机械工业的发展,对齿轮传动的强度、寿命、轻量化和可靠性等方面的要求越来越高,而对齿轮的分析方法也越来越多。在对齿轮的分析中,准确的建立模型占据着重要的位置。而建立精确的模型,首先我们要得到精确的齿轮廓形。本文就提出了一种得到齿轮廓形的新方法。
2、齿条刀具廓形曲线方程
2.1、齿条刀具廓形曲线方程的推导
图1
建立如图1所示的坐标系,X 轴在节线上,查机械加工工艺手册可得: m
hfp y y F A 25.1==-,
m p sp GJ ep FG π5.05.0=====,
m cp hap y y C F 25.1=+=-其中,hap 为标准基本齿条轮齿齿顶高,hfp 为标准基本齿
条轮齿齿根高,cp 为标准基本齿条轮齿与相啮合标准齿条轮齿之间的顶隙,p 为齿距,
ep 为齿槽宽,sp 为齿厚。
由图1可知,线段AB 与线段DE 关于Y 轴对称,圆弧BCD 与直线AB 切于B 点,与直线DE 切于D 点,与齿根线切于C 点,并且其圆心H 在Y 轴上。
则F 点坐标为()0,25.0m π-,G 点坐标为()0,25.0m π。 令直线AB 上点的坐标为()y x ,,则
απcot 25.00
-=+-m
x y ,即直线AB 的方程为:
0cot 25.0cot =++απαm x y (1)
将m hap y A 25.1==带入式(1),得m m x A απtan 25.0--=,即A 点坐标为
()m m m ,tan 25.125.0απ--。
同理可得,直线DE 的方程为:0cot 25.0cot =+-απαm x y (2)
E 点坐标为()m m m 25.1,tan 25.125.0απ+。
因为圆弧BCD 与直线AB 、直线DE 和齿根线都相切,所以H R HD HC HB ===。而又因为圆弧BCD 关于Y 轴对称,则只需要HC HB =。
令圆心H 的坐标为()0,0y -,则可以得到:
απαα
α
πcos 25.0sin cot 1cot 25.025.102
00m y m y y m +-=++-=
-,
解得,α
α
πsin 1cos 25.025.10--=
m m y
则半径α
α
απsin 1sin 25.1cos 25.025.10--=-==m m y m HC R H
令圆弧BCD 上的点的坐标为()y x ,,则()2
22
0H R x y y =++
显然,令圆弧BCD 上的点y 坐标都小于0,则上式可以变形为220x R y y H ---=。
即圆弧BCD 的方
程为:
2
2
sin 1sin 25.1cos 25.0sin 1cos 25.025.1x m m m m y -??
? ??------=αααπααπ (3)
解方程组??
???-??? ??------==++22
sin 1sin 25.1cos 25.0sin 1cos 25.025.10cot 25.0cot x m m m m y m x y αααπααπαπα 得点B 坐标为
()()()()???
? ??+---++--ααααπααπαπααααπcot tan sin 1cot 25.125.0cos cot 25.0sin 25.0,cot tan sin 1cot 25.025.1m m m m m m 由于点
B
和点
D
关于
Y
轴对称,则点
D
坐标为
()()()()???
?
??+---++-+-ααααπααπαπααααπcot tan sin 1cot 25.125.0cos cot 25.0sin 25.0,cot tan sin 1cot 25.025.1m m m m m m 又因为线段AB 、线段DE 、线段EI 和圆弧BCD 是齿条刀具的一个周期,则点I 到点A 的距离为m p π=,则点I 坐标为()m m m ,tan 75.0απ-。
综上所述,齿条刀具的一个齿的廓形曲线方程为:
????
?????
≤≤=≤≤=+-≤≤-??
? ??------=≤≤=++I E E D D
B B A x x x m y x x x m x y x x x x m m m m y x x x m x y ,,0cot 25.0cot ,sin 1sin 25.1cos 25.0sin 1cos 25.025.1,0cot 25.0cot 22
απααααπααπαπα(4) 其中,
m
m x A απtan 25.125.0--=,
()()
αααα
πcot tan sin 1cot 25.025.1+--=
m m x B ,
()()αααα
πcot tan sin 1cot 25.025.1+-+-=
m m x D ,m m x E
απtan 25.125.0+=,m m x I απtan 75.0-=。
2.2、齿条刀具廓形曲线方程的验证
假设50=m ,?=20α,带入式(4)可得,齿条刀具的一个齿的廓形曲线方程为:
???
?
??
?≤≤=≤≤=+≤≤-=++≤≤=+95x 62.5,62y 62x 0,22cot(20)*50)*3.14*0.25+(-x y 2222,0x -556.538.9y -22x 0,-62cot(20)*50)*3.14*0.25+(x y 2x (5) 根据式(5),运用matlab 编写了如下程序: x1=-62:1:-22;
y1=-(x1+0.25*3.14*50)*cot(0.348); x2=-22:1:22;
y2=-38.9-sqrt(556.5-x2.^2); x3=22:1:62;
y3=(x3-0.25*3.14*50)*cot(0.348); x4=62:1:95; for i=1:34 y4(i)=62.5; end
plot(x1,y1,'-k',x2,y2,'-k',x3,y3,'-k',x4,y4,'-k','linewidth',2),axis([-70,100,-80,80])
其运行结果图2所示:
机械设计齿轮传动[机械大作业齿轮传动] 哈尔滨工业大学 机械设计作业设计计算说明书 题目齿轮传动设计 系别机械设计制造及其自动化 班号 姓名 日期2014年月日 哈尔滨工业大学 机械设计作业任务书 题目齿轮传动设计 设计原始数据: 图1带式运输机 带式运输机的传动方案如图1所示,机器工作平稳、单向回转、成批生产,其他数据见表1。 目录 1.计算传动装置的总传动比i并分配传动比 (4) 1.1总传动比 (4) 1.2分配传动比.....................................................................42.计算传动装置各轴的运动和动力参数 (4)
2.1各轴的转速 (4) 2.2各轴的输入功率 (4) 2.3各轴的输入转矩 (5) 3.齿轮传动设计 (5) 3.1选择齿轮材料、热处理方式和精度等级 (5) 3.2初步计算传动主要尺寸 (5) 3.3计算传动尺寸 (7) 3.4校核齿面接触疲劳强度 (8) 3.5计算齿轮传动其他尺寸 (8) 3.6齿轮的结构设计 (9) 3.7大齿轮精度设计 (10) 4.参考文献 (13) 一、计算传动装置的总传动比i∑并分配传动比 1.总传动比为
i∑=nm960==10.67nw90 2.分配传动比 由于i1为1.8,所以 i2=i∑10.67==5.926i11.8 二、计算传动装置各轴的运动和动力参数 1.各轴的转速 1轴n1=nm=960r/min 2轴n2=n1960r/min==533.33r/mini11.8 n2533.33r/min=≈90r/mini25.9263轴n3= 卷筒轴nw=n3=90r/min 2.各轴的输入功率 1轴P1=Pd=3kW 2轴P2=Pη1=3?0.96=2.88kW1 3轴P3=P2η2η3=2.88?0.98?0.97=2.74kW 卷筒轴PkW3η2η4=2.74?0.98?0.99=2.656卷=P 上式中:η1————普通带传动传动效率; η2————一对滚子轴承的传动效率; η3————8级精度的一般传动齿轮的传动效率; η4————齿轮联轴器的传动效率。 均由参考文献[1]表9.1查得这些值。 3.各轴的输入转矩 电动机轴的输出转矩Td为 Td=9.55?106Pd3kW=9.55?106?=2.98?104N?mmnm960r/min
机械原理课程设计大作业 ——齿轮传动系统20 课程名称:机械原理课程设计 设计题目:齿轮传动系统分析 院系:机电工程学院 班级: 15 设计者: 学号: 115 指导教师:陈 设计时间: 2017年6月
1、设计题目 1.1机构运动简图 1 序号 电机转速(r/min ) 输出轴转速(r/min ) 带传动最大传动比 滑移齿轮传动 定轴齿轮传动 最大传动比 模数 圆柱齿轮 圆锥齿轮 一对齿 轮最大 传动比 模 数 一对齿轮最大传动比 模数 20 970 30 35 40 ≤2.5 ≤4 2 ≤4 3 ≤4 3 2、传动比的分配计算 电动机转速,输出转速min /30=n /35=min /40r n =带传动的最大传动比,滑移齿轮传动的最大传动比 根据传动系统的原始参数可知,传动系统的总传动比为: 333.3230970 1=== n i 714.2735 022=== n i 250.2440 3=== n i
传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为,定轴齿轮传动的传动比为f ,则总传动比 f v p f v p f v p 令则可得定轴齿轮传动部分的传动比为 425.24 *5.2250 .24max max 3=== f i i i 滑移齿轮传动的传动比为 333.5425 .2*5.2max 11== = f p v i i i 571.4425 .2*5.2714 .27max 22== = f p v i i i 设定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 3、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、8、9和1042,8,41,9,40,10======1=h ,径向间隙系数25.0=c ,分度圆压力角20=α,实际中心距 mm a 50'=。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11、12、13和14为高度变位齿轮,其齿数:。它们的齿顶高系数1=h 间隙系数25.0=c ,分度圆压力角20=α,实际中心距mm a 51'=。圆锥齿轮15和16 29,17==1=h ,径向间隙系数,分度 圆压力角为(等于啮合角α)。
一、基本概念(35分) 1.解释齿轮的瞬心线? 如图示,假设O 1和O 2是平面啮合时用来传递运动的两平行轴,从1O 轴向2O 轴传递回转运动,在垂直于轴线1O 和2O 的平面内,构件1和2的相对运动可以归结为两条共轭曲线的相互滚动,这两条相互滚动的共轭曲线就是瞬心线。 2.解释齿轮的瞬时回转轴? 答:两齿轮在空间任意点M 处的相对运动速度v 12 ,由式 v v r w r w v 2010221112 -+?-?=可以证明,空间上任意一点处的v 12 是和这个点绕某 个定轴作一定的螺旋运动时形成的线速度相同的。轴线k 称为瞬时回转轴,简称瞬时轴。 3.解释齿轮的瞬轴面? 答:让瞬时回转轴k 绕两个齿轮的轴线回转,可以得到两个双曲回转面P1及P2,它们称为两齿轮的瞬轴面。则P1和P2在k 轴处是相切的,当它们在切线处的相对运动速度v 12 =0,两瞬轴面作纯滚动。反之,它们会产生相对的的滑动。 4.解释共轭齿形? 答:齿轮传动过程中,两瞬心线作相对的纯滚动,两齿形则应时时保持相切接触(有相对滑动),它们常称为互相共轭的齿形或者共轭齿形。则得到,共轭齿形的公法线一定通过该瞬时的瞬心点P 。 5.解释啮合面? 答:配对曲面∑1和∑2在每一瞬时彼此沿一条线相接触,该线称作瞬时接触线。啮合面是表示在与机架刚性固接的固定坐标系f S 中的瞬时接触线族。啮合面用下列方程表 示:()(),,,,0f f u f u r r θφθφ== 。 式中:11 f f M r r = ,这里4×4矩阵1 f M 描述从1S 到f S 的坐标 变换。 6.解释齿廓渐屈线? 答:一条曲线的渐近线是该曲线的曲率中心的轨迹,也是原曲线的法线族的包络。 如图示,图中原曲线为渐开线,1M 、2M 、3M 为渐开线
三、 齿轮传动设计 一、设计题目 如图所示一个机械传动系统,运动由电动机1输入,经过机械传动系统变速后由圆锥齿轮16输出三种不同的转速。根据表中的传动系统原始参数设计该传动系统。 1.机构运动简图 1.电动机 2,4.皮带轮 3.皮带 5,6,7,8,9,10,11,12,13,14.圆柱齿轮 15,16.圆锥齿轮 2.机械传动系统原始参数 二、传动比的分配计算 电动机的转速1450/min n r =,输出转速1n =50r/min ,2n =45r/min ,3n =40r/min, 带传动的最大传动比max 2.5p i =,滑移齿轮的传动的最大传动比max 4v i =,定轴齿轮传动的最大传动比max 4d i =。
根据系统的原始参数,系统的总传动比为1i = 1 n n =1450/50=29.00 2i = 2n n =1450/45=32.222 3i =3 n n =1450/40=36.25 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为max 2.5p i =,滑移齿轮的传动比为1v i 、2v i 和3v i ,定轴齿轮传动的传动比为f i 则总传动比为 1max 1p v f i i i i = 2max 2p v f i i i i = 3max 3p v f i i i i = 令3max 4v v i i == 则可得定轴齿轮传动部分的传动比为f i = max max 3 *v p i i i =4*5.225.36=3.625 滑移齿轮传动的传动比为1v i = f p i i i *max 1= 9 .2*5.229 =4 2v i = f p i i i *max 2=9.2*5.222 .32=4.444 定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 d i =3f i =3625.3=1.536 三、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、 8、9和10、为角度变位齿轮,其齿数: 52,19,41,17,50,231098765======z z z z z z 它们的齿顶高系数1a h *=,顶隙系数0.25c *=,分度圆压力角=20a o ,实际中心距取mm a 73=。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11, 12, 13和14为角度变位齿轮,齿数:==1311z z 17,==1412z z 23。它们的齿顶高系数 1a h *=,顶隙系数0.25c *=,分度圆压力角=20a o ,实际中心距'=56mm a 。圆锥
硕士学位课程考试试卷 考试科目:齿轮啮合原理 考生姓名:考生学号: 学院:专业:机械设计及理论考生成绩: 任课老师(签名) 考试日期:2013 年6月日午时至时
一、 基本概念(每题3分,共计24分) 1.解释齿轮的瞬心线? 答:对于作平面运动的两个构件1和2,瞬心线是瞬时回转中心在坐标系i S (i=1,2)中的轨迹。当坐标系i S 绕i O 转动时,瞬时回转中心I 就会描绘出瞬心线。当齿轮传动比为常数时,瞬心I 保持在1O 2O 上的位置,瞬心线是半径分别为12ρρ和的两圆。当齿轮传动比不是常数时,瞬心在回转运动传递过程中沿1O 2O 移动,瞬心线是非圆形曲线,呈封闭的或者不封闭的。当一个构件回转运动时,另一个构件直移运动时,瞬心线是一个圆和与圆相切的直线。 2.解释平面曲线的曲率? 答:如图1所示,用s 表示曲线的弧长。考察曲线上分别与s 和s s +?对应的两个相邻的点M 和N ,如图1(a)所示,点M 和N 之间的弧长s ?,而α?是点M 和N 处的两条切线之间的夹角。当点N 趋近于点M 时,比值s α ??的极限称为曲线在点M 处的曲率(标记为K )。将K 取倒数得1 K 称为曲线在点M 处的曲率半径(标记为c ρ)。 这里的c ρ是极限(密切)圆的半径,而极限圆是当两个相邻点N 和'N 趋近于点M 时通过点M 和该两个相邻点画出来的,如图1(b)所示。我们把圆心C 称为曲率中心。 图1 平面曲线的曲率 3.解释齿廓渐屈线? 答:齿廓渐屈线是给定齿廓曲线 曲率中心的轨迹,同时也是给定齿廓 曲线密切圆圆心的轨迹,如图2所示。 从图上可以看出,齿廓曲线上每一点 的法线都是和其渐屈线相切的,换句 话说,齿廓渐屈线是齿廓曲线法线的 包络。
一、 设 计题目 设计带式运输机中的齿轮传动:带式运输机的传动方案如下图所示,机器运行平稳、单向回转、成批生产,其他数据参见下方表格。 方案 电动机工作 功率P d /kW 电动机满载转速n m /(r/min) 工作机的转速n w /(r/min) 第一级传动比i 1 轴承座中心高H/mm 最短工作年限 工作环境 5.1.3 3 960 110 2 180 5年2班 室外、 有尘 二、 选择齿轮材料、热处理方式、精度等级 考虑到带式运输机为一般机械,且仅有一级齿轮减速传动,故大、小齿轮均选用40Cr 合金钢,调质处理,采用软齿面。大小齿面硬度为241~286HBW ,平均硬度264HBW 。 由要求,该齿轮传动按8级精度设计。 三、 初步计算传动主要尺寸 本装置的齿轮传动为采用软齿面开式传动,齿面磨损是其主要失效形式。其设计准则按齿根疲劳强度进行设计,并考虑磨损的影响将模数增大10%~15%。 齿根弯曲疲劳强度设计公式; m ≥√2KT 1?d z 12?Y F Y s Y ε[σ]F 3
式中Y F——齿形系数,反映了轮齿几何形状对齿根弯曲应力σF的影响。 Y s——应力修正系数,用以考虑齿根过度圆角处的应力集中和除弯曲应力以外的其它应力对齿根应力的影响。 Yε——重合度系数,是将全部载荷作用于齿顶时的齿根应力折算为载荷作用于单对齿啮合区上界点时的齿根应力系数。 [σ]F——许用齿根弯曲应力。 1.小齿轮传递的转矩 T1=9.55×106×P1 n1 p1=η1η2P d 根据参考文献[2]表9.1,取η1=0.96,η2=0.97。 由此 P1=η1η2P d=0.96×0.97×3=2.7936KW T1=9.55×106×P1 1 =9.55×106× 2.7936 960 2 =55581N?mm 2.齿数Z的初步确定 为了避免根切,选小齿轮z1=17,设计要求中齿轮传动比i=n1 n w =960/2 110 =4.3636,故 z2=i×z1=4.3636×17=74.1818,取z2=75。 此时的传动比误差为 ε=|i?i0 i |×100%=| 4.3636?75/17 4.3636 |×100%=1.1%<5% 满足误差要求,故可用。 3.载荷系数K的确定 由于v值未知,K v不能确定,故可初选载荷系数K t=1.1~1.8,本设计中初选K t=1.4。 4.齿宽系数?d的确定 根据参考文献[1]表8.6,齿轮在轴承上为悬臂布置,软齿面,选取齿宽系数?d=0.35。 5.齿形系数Y F和应力修正系数Y s的确定 根据参考文献[1]图8.19,Y F1=2.95,Y F2=2.25。 根据参考文献[2]图8.20,Y s1=1.52,Y s2=1.76。 6.重合度系数Yε的确定 对于标准外啮合直齿圆柱齿轮传动,端面重合度 εα=[1.88?3.2(1 z1 + 1 z2 )]=[1.88?3.2( 1 17 + 1 75 )]=1.6491 Yε=0.25+0.75 εα =0.25+ 0.75 1.6491 =0.72 7.许用弯曲应力[σ]F的确定
Harbin Institute of Technology 机械设计大作业说明书 大作业名称:齿轮传动设计 设计题目: 5.1.2 班级:1208108 设计者: 学号: 指导教师:吴伟国、古乐 设计时间:2014.11.04 哈尔滨工业大学
目录 齿轮设计任务书 (1) 一选择齿轮材料、热处理工艺及精度等级 (1) 二传动装置的运动和动力参数设计 (2) 三选择齿轮材料、热处理方式、精度等级 (3) 四初步计算传动主要尺寸 (4) 五计算传动尺寸 (7) 六大齿轮结构尺寸的确定 (8) 七参考文献 (9)
一、机械设计作业任务书 1. 设计题目:齿轮传动设计 2. 设计结构简图 3. 设计原始数据 机器工作平稳,单向回转,成批生产 方案 P d (KW ) (/min)m n r (/min)w n r 1i 轴承座中 心高H (mm ) 最短工作 年限L 工作环境 5.1.2 4 960 100 2 180 3年3班 室外 有尘
三、 选择齿轮材料、热处理方式、精度等级 带式输送机为一般机械,且要求成批生产,故毛坯需选用模锻工艺,起模斜度为1:10。 故由已知 大小齿轮均选用45号钢 采用软齿面。 由参考文献1表6.2查得: 小齿轮调质处理 齿面硬度为217~225HBW 平均硬度236HBW 大齿轮正火处理 齿面硬度为162~217HBW 平均硬度189.5HBW 。 由参考文献2表16.1查得 齿轮可选用8级精度。 二、 传动装置的运动和动力参数设计 1.选择电动机 由方案图表中的数据要求,查参考文献【2】表14.1 Y 系列三相异步电动机的型号及相关数据选择可选择Y132S-6。 可查得轴径为38mm,长为80mm 。 2.计算传动装置的总传动比i 并分配传动比 总传动比 i ∑ : 60.9100 960=== w m n n i 带式运输机为二级传动系统,且要求第一级V 带传动的传动比错误!未找到引用源。=2 分配传动比:21i i i ?=∑ 故第二级齿轮传动的传动比为:80.42 6.912===i i i 。 3、传动装置各轴的运动参数 (1)、各轴转速 电动机轴 m n =960r/min I 轴 I n =m n /1i =480r/min ∏轴 ∏n =I n /2i =100r/min 卷筒轴 I∏n =100r/min (2)、各轴输入功率 电动机轴 P=4KW
《机械原理》大作业 题目机械原理 齿轮机构设计 专业机械设计制造及其自动化 学号 学生 指导教师刘福利 完成日期2018.5.30
1.设计题目(21号) 如图所示一个机械传动系统,运动由电动机1输入,经过机械传动系统变速后由圆锥齿轮16输出三种不同的转速。根据表中的传动系统原始参数设计该传动系统。 1.1机构运动简图 1.电动机 2,4.皮带轮 3.皮带 5,6,7,8,9,10,11,12,13,14.圆柱齿轮15,16.圆 锥齿轮 1.2机械传动系统原始参数
2.传动比的分配计算 电动机转速n=745r/min,输出转速n 1=40 r/min,n 2 =35 r/min,n 3 =30 r/min, 带传动的最大传动比=2.5,滑移齿轮传动的最大传动比=4,定轴齿轮传动的最大传动比=4。 根据传动系统的原始参数可知,传动系统的总传动比为 =745/40=18.625 =745/35=21.286 =745/30=24.833 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为,滑移齿轮的传动比为,定轴齿轮传动的传动比为,则总传动比 令=4 则可得定轴齿轮传动部分的传动比为 = =2.4833 滑移齿轮传动的传动比= =3.0000 = =3.4287 定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 =4 符合设计的参数要求。
3.齿轮齿数的确定 3.1 滑移齿轮传动齿数的确定 根据传动比符合的要求,以及中心距必须和后两个齿轮对相同,齿数最 好互质,不能产生根切以及尺寸尽可能小等一系列原则,初步确定滑移齿轮5,6为标准齿轮,齿数分别为: 18,= 53。设定实际中心距a’=71mm。 根据传动比符合的要求,以及中心距必须和其他两个齿轮对相同, 齿数最好互质,不能产生根切以及尺寸尽可能小等一系列原则,初步确定齿轮7,8,9,10均为角度变位齿轮,齿数分别为16, 55,变位系数 x1=0.55,x2=0.55 ;14,57,变位系数x1=0.50,x2=0.60。 它们的齿顶高系数=1,径向间隙系数=0.25,分度圆压力角=20°,实际 中心距=67mm。 (根据齿轮传动啮合角,齿轮齿数之和,齿轮齿数之比等各个参数,根据变位系数线图,选择适当的变位系数,具体参数见第4部分的齿轮详细参数) 3.2 定轴传动齿轮齿数的确定 根据定轴齿轮变速传动系统中传动比符合的要求,以及齿数最好互质,不能 产生根切以及尺寸尽可能小等一系列原则,可大致选择如下: 圆柱齿轮11、12、13和14为高度变位齿轮,其齿数:=17,23。变位系数x1=0.120,x2=-0.120,它们的齿顶高系数=1,径向间 隙系数=0.25,分度圆压力角=20°。 3.3 圆锥传动齿轮齿数的确定
研究生课程考核试卷 (适用于课程论文、提交报告) 科目:齿轮啮合原理教师:林超 姓名:张清亮学号:20150713090 专业:车辆工程类别:车辆工程领域上课时间:2015 年9 月至2015 年11 月 考生成绩: 卷面成绩平时成绩课程综合成绩 阅卷评语: 阅卷教师(签名) 重庆大学研究生院制
一、基本概念(每题2分,共计20分) 1、解释齿廓渐屈线? 答:一条给定齿廓曲线的渐屈线是该齿廓曲线曲率中心的轨迹,也是该齿廓曲线密切圆圆心的轨迹(图 1.1)。齿廓曲线每一点的法线都和其渐屈线相切,因此,齿廓渐屈线也是齿廓法线族的包络。 在齿轮的瞬心线给出的情况下(图1.2),齿轮齿廓的渐屈线可由p r PC =+确定, 式中p为齿廓渐屈线的径矢,r为瞬心线的径矢。PC的模l由下式确定: sin() 1sin PC l r d u d λμ λ φ - == ?? + ? ?? 式中r r =。在图1.10的直角坐标系中,齿廓的渐屈线方程为: cos cos() sin sin() x r l y r l φφλ φφλ =++ ? ? =++ ? 图1.1 齿廓的渐屈线图1.2 齿廓渐屈线坐标系本题参考文献:李特文. 齿轮几何学与应用理论[M]. 国楷, 叶凌云, 范琳等, 译. 上海: 上海科学技术出版社, 2008. 2、解释平面曲线的曲率? 答:在图1.3中,用s表示曲线的弧长。考察曲线上分别与s和s s +?对应的两个相邻的点M和N,图1.3(a)。点M和N之间的弧长s?,而α ?是点M和N处的两条 切线之间的夹角。当点N趋近于点M时,比值 s α ? ? 的极限称为曲线在点M处的曲率 (标记为K),即 lim s K s α ?→ ? = ? 。在 lim= s d s ds αα ?→ ? ? 存在的条件下, d K ds α =。比值 s α ? ? 称为曲线在点M处的曲率半径(标记为 c ρ),即= c s ρ α ? ? ,且 1 = c K ρ。这里的 c ρ是极限(密切)圆的半径,极限圆是当两个相邻点N和'N趋近于点M时通过点M和该两个相邻点画出的,图1.3(b)。圆心C称为曲率中心。
哈尔滨工业大学 机械设计作业设计计算说明书题目齿轮传动设计 系别机械设计制造及其自动化班号 姓名 日期2014年月日 哈尔滨工业大学 机械设计作业任务书 题目齿轮传动设计 设计原始数据
图1 带式运输机 带式运输机的传动方案如图1所示,机器工作平稳、单向回转、成批生产,其他数据见表1。 目录 计算传动装置的总传动比i 并分配传动比 (4) 1总传动比 (4) 2分配传动比.....................................................................4 计算传动装置各轴的运动和动力参数 (4) 1各轴的转速 (4) 2各轴的输入功率 (4) 3各轴的输入转矩 (5) 齿轮传动设计 (5)
1选择齿轮材料、热处理方式和精度等级 (5) 2初步计算传动主要尺寸 (5) 3计算传动尺寸 (7) 4校核齿面接触疲劳强度 (8) 5计算齿轮传动其他尺寸 (8) 6齿轮的结构设计 (9) 7大齿轮精度设计 (10) 参考文献 (13) 一、计算传动装置的总传动比i∑并分配传动比 总传动比为 i∑=nm960==10.67 nw90
分配传动比 由于i1为8,所以 i2=i∑10.67==926 i18 二、计算传动装置各轴的运动和动力参数各轴的转速 1轴n1=nm=960r/min 2轴n2=n1960r/min==5333r/mini18 n25333r/min=≈90r/mini29263轴n3= 卷筒轴nw=n3=90r/min 各轴的输入功率 1轴P1=Pd=3kW
2轴P2=Pη1=3?0.96=88kW 1 3轴P3=P2η2η3=88?0.98?0.97=74kW 卷筒轴PkW 3η2η4=74?0.98?0.99=656卷=P 上式中η1————普通带传动传动效率; η2————一对滚子轴承的传动效率; η3————8级精度的一般传动齿轮的传动效率; η4————齿轮联轴器的传动效率。 均由参考文献[1]表1查得这些值。 各轴的输入转矩 电动机轴的输出转矩Td为 Td=55?106Pd3kW=55?106?=98?104N?mm nm960r/min
北航机械原理四齿轮 设计
215.在渐开线齿轮设计中为使机构结构尺寸紧凑,确定采用齿数z=12的齿轮。试问: (1)若用标准齿条刀具范成法切制z=12的直齿圆柱标准齿轮将会发生什么现象?为什么?(要求画出几何关系图,无需理论证明。) (2)为了避免上述现象,范成法切制z=12的直齿圆柱齿轮应采取什么措施? (3)范成法切制z=12, β=30?的斜齿圆柱齿轮,会不会产生根切? 216.已知齿条刀具的参数:mm,,,。用范成法加工一对直齿圆柱外齿轮A、B。A轮齿数,变位系数 ;B轮齿数,变位系数。试问: (1)加工时,与两齿轮分度圆作纯滚动的刀具节线是否相同,为什么?加工出来的两轮齿廓曲线形状与不变位加工出来的齿廓曲线是否对应相同? (2)两轮按无侧隙安装时,中心距,顶隙c和啮合角各为多少? (3)两轮的分度圆齿厚S和齿全高h各为多少? 217.已知一对渐开线直齿圆柱齿轮参数如下:mm,,。试问: (1)要求这对齿轮无根切且实现无侧隙啮合,应采取何种类型传动? (2)若要求该对齿轮的中心距为103mm,能使两齿轮均不产生根切吗? 提示: 218.有一回归轮系(即输入轴1与输出轴3共线),已知, , ,。各轮的压力角α=20?,模数m=2mm,=1,=0.25。问为保证中心距最小,而且各轮又不产生根切应采用哪种变位传动方案?说明理由并写出各轮变位系数x的大小。
219.若一对直齿圆柱齿轮传动的重合度=1.34,试说明若以啮合点移动一个基圆周节为单位,啮合时有多少时间为一对齿,多少时间为两对齿,试作图标出单齿啮合区域,并标明区域长度与的关系。 220.图示为一渐开线AK ,基圆半径=20mm,K点向径=35mm。试画点处渐开线的法线,并计算K点处渐开线的曲率半径。 出K
齿轮基础知识问答 1.什么是齿廓啮合基本定律,什么是定传动比的齿廓啮合基本定律?齿廓啮合基本定律的作用是什么? 答:一对齿轮啮合传动,齿廓在任意一点接触,传动比等于两轮连心线被接触点的公法线所分两线段的反比,这一规律称为齿廓啮合基本定律。若所有齿廓接触点的公法线交连心线于固定点,则为定传动比齿廓啮合基本定律。 作用;用传动比是否恒定对齿廓曲线提出要求。 2.什么是节点、节线、节圆?节点在齿轮上的轨迹是圆形的称为什么齿轮? 答:齿廓接触点的公法线与连心线的交点称为节点,一对齿廓啮合过程中节点在齿轮上的轨迹称为节线,节线是圆形的称为节圆。具有节圆的齿轮为圆形齿轮,否则为非圆形齿轮。 3.什么是共轭齿廊? 答:满足齿廓啮合基本定律的一对齿廓称为共轭齿廓。 4.渐开线是如何形成的?有什么性质? 答:发生线在基圆上纯滚动,发生线上任一点的轨迹称为渐开线。 性质:(1)发生线滚过的直线长度等于基圆上被滚过的弧长。 (2)渐开线上任一点的法线必切于基圆。 (3)渐开线上愈接近基圆的点曲率半径愈小,反之则大,渐开线愈平直。 (4)同一基圆上的两条渐开线的法线方向的距离相等。 (5)渐开线的形状取决于基圆的大小,在展角相同时基圆愈小,渐开线曲率愈大,基圆愈大,曲率愈小,基圆无穷大,渐开线变成直线。 (6)基圆内无渐开线。 5.请写出渐开线极坐标方程。 答:rk = rb / cos αk θk= inv αk = tgαk一αk 6.渐开线齿廓满足齿廓啮合基本定律的原因是什么? 答;(1)由渐开线性质中,渐开线任一点的法线必切于基圆 (2)两圆的同侧内公切线只有一条,并且两轮齿廓渐开线接触点公法线必切于两基圆,因此节点只有一个,即 i12 =ω1 / ω2 =O2P / O1P =r2′/ r1′= rb2 / rb1 = 常数 7.什么是啮合线? 答:两轮齿廓接触点的轨迹。 8.渐开线齿廓啮合有哪些特点,为什么? 答:(1)传动比恒定,因为i12 =ω1 /ω2=r2′/r1′ ,因为两基圆的同侧内公切线只有一条,并且是两齿廓接触点的公法线和啮合线,因此与连心线交点只有一个。故传动比恒定。 (2)中心距具有可分性,转动比不变,因为i12 =ω1 /ω2=rb2 / rb1 ,所以一对齿轮加工完后传动比就已经确定,与中心距无关。
*************学校 硕士学位课程考试试卷》 考试科目:齿轮啮合原理 考生姓名:考生学号: 学院:机械工程学院专业:机械制造及自动化考生成绩: 任课老师(签名) 。
~ 一 基本概念 1.解释齿轮的瞬心线? 两平面啮合齿轮的传动比可以是可变的,也可以是恒定的,传动比函数将确定两齿轮的瞬时角速度比,后者随第一个齿轮的转角1?而变化 )(2:112112???ωωf dt d dt d i == = 类似的 () 121121?ωf i == 在1?的变化范围内,函数()112?f i =取有限的正值。假定从1 o 轴向2o 轴传递回转运动(如图), 在垂直于轴线1o 和2o 的平面内, 构件1 和构件2的相对运动可以归结为两条共轭曲线的相互滚动,这两条相互滚动的共轭曲线叫瞬心线。 在齿轮啮合原理中,把瞬心P 称为啮合节点。传动比恒定时,节点P 固定不动;传动比是变数时,节点P 在连心线21O O 上作相应的变动。每个齿轮的瞬心线,就是节点p 在与该齿轮相固连的坐标系中的轨迹,因而两齿轮的相对运动可以归结为它们的瞬心线作纯滚动。 " 2. 解释共轭齿廓? 凡满足齿廓啮合基本定律的一对齿轮的齿廓称共轭齿廓,共轭齿廓的齿廓曲线称为共轭曲线。 共轭齿廓在接触点处的公法线(简称为齿廓法线)必须通过瞬心线的瞬时切点。这是齿廓啮合的基本定理,确定了一对共轭齿廓的几何条件。 共轭齿廓的曲线: 在已知一条齿廓曲线) (1Γ 和两构件相对运动的条件下,与) (1Γ 相共轭的齿廓曲线) (2Γ 的曲率 2k 可用下式求得: )1()12()1(11)12()1(12n dt r d k dt r d k ?-=??? ? ??+ωυ (1) 式中 ) 1(n ——齿廓) (1Γ 的幺法矢; 1k ——) (1Γ 的相对曲率。 \ 当) (1Γ 以方程式1111) 1()()(j u y i u x r +=给出时,1k 由下式计算: 2/32121 1111 1)(y x y x y x k '+''''-'''= (2) 3.解释Willis 定理? Willis 定理也称为啮合基本定理,起表述如下:按给定角速比变化规
第十章齿轮机构及其设计 10.1本章知识点串讲 本章的重点有:齿轮的齿廓曲线;渐开线齿廓啮合传动的特点;渐开线各部分的名称、符号及标准齿轮几何尺寸的计算;渐开线直齿圆柱齿轮的啮合传动的条件;变位齿轮传动的基本理论及设计计算;斜齿轮﹑蜗轮蜗杆及圆锥齿轮传动的重点是它的啮合传动及设计计算的特殊点等。 【知识点1】齿轮的齿廓曲线 一、渐开线的形成 二、渐开线的性质当一直线沿半径为rb的圆作纯滚动时,该直线上任一点K 的轨迹称为该圆的渐开线,该圆称为渐开线的基圆,直线 x-x称为渐开线的发生线,角θK 称为渐开线AK段的展角。 a.发生线在基圆上滚过的线段长度KN 等于基圆上被滚过的圆弧长度AN,即KN = AN。 b.渐开线上任一点的法线切于基圆。 c.切点N为渐开线上在点K处的曲率中心,NK为K点处的曲率半径。 d.基圆以内没有渐开线。 e.渐开线的形状仅取决于其基圆的大小。
f.同一基圆上任意两条渐开线间的法向距离相等。 【知识点2】渐开线齿廓啮合传动的特点 P r r b ω ω O O K r 2 ′ ′ r 1 N N K ′ 渐开线齿廓能保证定传动比 i O P O P r r 1212212 1===ωω 渐开线齿廓传动的特点: 1.啮合线为定直线,啮合点的轨迹线——内公切线、啮合线、公法线三线合一 2.啮合角为常数,啮合角:啮合线与过节点P 处两节圆的内公切线之所夹锐角。——它等于两齿轮在节圆上的压力角。 3.可分性
【知识点3】渐开线各部分的名称、符号及标准齿轮几何尺寸的计算 一、齿轮各部分的名称及符号 二、渐开线标准直齿圆柱齿轮的几何尺寸 1.渐开线齿轮的五个基本参数:齿数(z),模数(m),分度圆压力角(齿形角),齿顶高系数ha *,径向间隙系数c *——亦称顶隙系数。 (1)齿数(z) 齿数根据设计需要确定,如:传动比、中心距要求、接触强度等。 (2)模数(m) a. 定义:模数的定义为齿距P 与π的比值,即m= P/π b. 模数的意义 确定模数m 实际上就是确定周节p ,也就是确定齿厚和齿槽宽e 。模数m 越大,周节p 越大,齿厚s 和齿槽宽e 也越大;模数越大,轮齿的抗弯强度越大。 (3)分度圆压力角(齿形角)a a :在分度圆上的受力方向线与被作用点速度方向线所夹锐角。国家标准中规定分度圆压力角为标准值为20°。 (4)齿顶高系数(h a *) 齿顶高:h a = h a * m 轮齿与齿槽 四圆:齿顶圆(ra ,da) 齿根圆(rf ,df) 基 圆(rb ,db) 分度圆(r ,d) ——设计基准圆 周向度量:齿厚(s) 齿槽(e) 周节(p=s+e) 径向度量:齿顶高(ha) 齿根高(hf) 全齿高(h)
1.解释齿轮的瞬心线? 如图示,假设O 1和O 2是平面啮合时用来传递运动的两平行轴,从1O 轴向2O 轴传递回转运动,在垂直于轴线1 O 和2O 的平面内,构件1和2的相对运动可以归结为两条共轭曲线的相互滚动,这两条相互滚动的共轭曲线就是瞬心线。 2.解释Willis 定理? Willis 定理也称为啮合基本定理,起表述如下:按给定角速比变化规律传递平行轴之间的回转运动的两个齿廓,其接触点处的公法线应当通过瞬时啮合节点。Willis 定理确定了按给定传动比规律传递运动的一对齿廓共轭的几何条件。不论对定传动比的平面啮合,还是对变传动比的平面啮合都是正确的。 2.解释齿轮的瞬时回转轴? 答:两齿轮在空间任意点M 处的相对运动速度v 12 为v v r w r w v 2 10221112-+?-?=可以证明,空间上任意一点处的 v 12 是和这个点绕某个定轴作一定的螺旋运动时形成的线速度相同的。该定轴称为瞬时回转轴,简称瞬时轴。在平 行轴或相交轴的齿轮副中,即为两齿轮作相对的瞬时回转运动的轴线,在交错轴齿轮副中,即为两齿轮作相对的瞬 时螺旋运动的轴线。 3.解释齿轮的瞬轴面? 答:让瞬时回转轴k 绕两个齿轮的轴线回转,可以得到两个双曲回转面P1及P2,它们称为两齿轮的瞬轴面。则P1和P2在k 轴处是相切的,当它们在切线处的相对运动速度 v 12 =0,两瞬轴面作纯滚动。反之,它们会产生相对的 的滑动。 4. 解释平面曲线的曲率 曲线上有两个相邻的点M 和N ,它们之间的弧长为s ?,两点处的切线之间的夹角为α?。当两点趋于重合时,比值 s α ??的极限称为曲线在点M 处的曲率(标记为K ),即0lim s K s α?→?=?。曲线的曲率就是针对曲线上某个点的切线方 向角对弧长的转动率,通过微分来定义,表明曲线偏离直线的程度。数学上表明曲线在某一点的弯曲程度的数值。 曲率越大,表示曲线的弯曲程度越大。曲率的倒数就是曲率半径 4.解释共轭齿形? 答:齿轮传动过程中,两瞬心线作相对的纯滚动,两齿形则应时时保持相切接触(有相对滑动),它们常称为互相共轭的齿形或者共轭齿形,并且共轭齿形的公法线一定通过该瞬时的瞬心点P 。 5.解释啮合面? 答:配对曲面∑1和∑2在每一瞬时彼此沿一条线相接触,该线称作瞬时接触线。齿轮齿面上瞬时接触线的位置决定于运动参数φ,啮合面是表示在与机架刚性固接的固定坐标系f S 中的瞬时接触 线族。啮合面用下列方程表示: () (),,,,0f f u f u r r θφθφ==。式中: 11f f M r r =,这里4×4矩阵 1 f M 描述从1S 到f S 的坐标变换。 5. 写出Eulor-Savary 的方程式? 212111sin 11r r a x x +=??? ? ??±+ρρ 在两瞬心线内切的情况下,方程式中凹形瞬心线的曲率半径应取负值。类似
螺旋面加工中刀具干涉检查研究 1课题背景 随着机械制造工业的发展,各种新型螺杆机构不断涌现。螺杆泵、螺杆马达(钻具)、螺旋挤压机、螺杆式气体压缩机等设备在石油钻采、化工、轻工、军工、造船、橡塑等行业的应用日益广泛。虽然螺杆机构的设计制造技术具有悠久的历史,但由于新型螺杆机构的螺旋面廓形设计比较复杂,精度要求不断提高[1][2],一些大型螺杆的加工效率和制造成本问题越来越突出,而且国内外尚未制定出系统的设计制造标准。因此,从客观上促进了螺旋面加工技术的不断发展,使之成为目前机械制造领域中倍受关注的研究课题[3]。 目前,在三坐标数控螺杆铣床上,采用截面包络法加工复杂螺杆是一项新的螺杆加工工艺。与传统的展成法与成形法加工相比,该工艺方法具有切削用量大、加工效率高、刀具结构简单、对工件型线适应广、调整方便、可控精度高等许多优点。它是一种使标准刃形刀具相对于工件按一定规律作包络运动,加工出工件螺旋表面的铣削方法。其编程思想是从端截面出发,采用等精度曲线逼近的方法,使刀具切削刃在工件的接触轨迹在给定的精度范围内逼近工件的理论轮廓。使用这种编程方法加工出的螺杆能够满足一般精度螺杆的加工要求。目前,国产及进口专用机床所提供的编程系统均采用平面包络的计算方法,即认为在加工过程中刀具与工件的接触点(简称刀触点)轨迹为平面曲线,而实际上在三坐标专用铣床上进行包络加工时,刀触点轨迹为复杂的空间曲线。因此,按平面包络计算方法得到的刀具轨迹及数控程序必然存在理论误差,影响加工精度。如何才能找到一种快速高效的基于空间包络加工原理的编程方法,已经成为螺旋面数控加工研究领域的热点问题[4]。在众多的研究成果中,基于最小有向距离理论并结合五点寻优方法而得到的最小有向距离算法[5],是一种基于空间包络加工原理的编程方法,它解决了迭代算法中存在的收敛性问题,避免了全局区域内大量的点集计算,具有计算速度快、原理简单等特点,已成为一种非常有效的在复杂螺旋面数控加工中计算刀位轨迹的方法。该算法的基本思想为:设有两个连续可微曲面F.、FZ,在不发生干涉的条件下,当F.相对于F:沿终结运动方向运动时,在该运动方向上两曲面之间距离最小的对应点分别是两曲面上的啮合点(即加工过程中的刀触点)。这样就将计算空间刀位轨迹的问题转化为平面问题,既保证了加工精度又大大降低了计算难度。然而,该算法没有对生成的刀位轨迹进行干涉校验。为了保证加工质量,提高加工精度,必须在此基础上对刀具是否发生过切干涉的判定算法进行研究。同时,从提高加工效率和刀具耐用度、降低生产成本的角度看,也必须进行刀具干涉检查,尽可能在满足加工精度的前提下改进刀具结构[6][7]。尽管国内外许多学者和工程技术人员对于刀具干涉检查的算法进行了大量的研究,针对不同的加工对象提出了许多实用的计算方法,但一般只对某些问题有效,存在着一定的局限性[8]。 本文利用最小有向距离理论,将刀具干涉检查问题转化为求取刀具和工件之间沿终结运动方向对应点距离的全局最小值问题。利用遗传算法,针对复杂螺旋面各处吃刀深度不同的特点,提出并实现了基于最小有向距离理论的刀具干涉检查算法。 2国内外复杂曲面加工刀具干涉检查研究现状与发展趋势
硕士学位课程考试试卷 考试科目:齿轮啮合原理 考生姓名:考生学号: 学院:专业:机械设计及理论 考生成绩: 任课老师(签名) 考试日期:2013年6月日午时至时
一、基本概念(每题3分,共计24分) 1 ?解释齿轮的瞬心线? 答:对于作平面运动的两个构件1和2,瞬心线是瞬时回转中心在坐标系 S (i=1,2) 中的轨迹。当坐标系S 绕O 转动时,瞬时回转中心I 就会描绘出瞬心线。当齿轮传动 比为常数时,瞬心I 保持在0!。?上的位置,瞬心线是半径分别为 6和嘉的两圆。当齿 轮传动比不是常数时,瞬心在回转运动传递过程中沿 0,02移动,瞬心线是非圆形曲 线,呈封闭的或者不封闭的。当一个构件回转运动时,另一个构件直移运动时,瞬心 线是一个圆和与圆相切的直线。 2?解释平面曲线的曲率? 答:如图1所示,用s 表示曲线的弧长。考察曲线上分别与 s 和s 「s 对应的两 个相邻的点M 和N ,如图1(a )所示,点M 和N 之间的弧长二s ,而是点M 和N 处的两条切线之间的夹角。当点 N 趋近于点M 时,比值 的极限称为曲线在点M 处的曲率(标记为K )。 将K 取倒数得丄称为曲线在点M 处的曲率半径(标记为匚)。 K 这里的心是极限(密切)圆的半径,而极限圆是当两个相邻点 N 和N '趋近于点M 时 通过点M 和该两个相邻点画出来的,如图1(b )所示。我们把圆心C 称为曲率中心。 答:齿廓渐屈线是给定齿廓曲线 曲率中心的轨迹,同时也是给定齿廓 从图上可以看出,齿廓曲线上每一点 的法线都是和其渐屈线相切的,换句 话说,齿廓渐屈线是齿廓曲线法线的 包络。 4 ?解释齿轮的瞬时回转轴? ■ '■:s 3 ?解释齿廓渐屈线? 曲线密切圆圆心的轨迹,如图2所示 M / 图1平面曲线的曲率 图2齿廓渐屈线
一、 基本概念(每题4分,共计32分) 1.解释齿轮的瞬心线? 答:设有两个直齿齿轮,它们的轴线平行,在垂直于轴线的一个截面内,齿轮的中心为1O 及2O (图1.1),齿轮的瞬时角速度为1ω及2ω,从起始位置开始的转角为 1?及2?,则1212=,=d d dt dt ????,瞬时传动比为12i ,11112222d d dt i d d dt ?ω??ω?===。 如果齿轮副不是以等比传动,则12i 是个变数,它可以表示为齿轮1的转角的函数 1?,即121=()i f ?;当传动比是常值时,111222 i ω?ω?==。 设平面Ⅰ随同齿轮1绕1O 旋转,平面Ⅱ随同齿轮2绕2O 旋转。在任意一点M 处,齿轮1对齿轮2的相对运动速度矢量错误!未找到引用源。V I Ⅱ,M 点随着Ⅰ转动时的线速度矢量为V I ,M 点随着Ⅱ转动时的线速度矢量为V Ⅱ。M 点的位置不同,该点处的相对运动速度V I Ⅱ也不同。对于=V V I Ⅱ的点,其相对运动速度为零。由于这点的V I 与V Ⅱ方向相同,模也相等,它必定在中心联线12O O 上(否则V I 与V Ⅱ的方向不可能相同),设它为图1.1中的P 点,而1122O P r O P r ==,,则从V I 与V Ⅱ的模相等的条件可知,1122r r ωω?=?。所以瞬时传动比成为 121221 =r i r ωω= 。 P 点处的相对运动速度为零,所以P 点就是两齿轮的瞬时相对运动中心(瞬心)。由于P 点在联心线12O O 上,且221211 O P r i O P r ==,当传动比12i 是变数时,在齿轮传动过程中,P 点的位置也是在12O O 上变动的。P 点在平面Ⅰ及Ⅱ上的轨迹就称为齿轮1及齿轮2的瞬心线(图1.2)。 由于两瞬心线在任意瞬时都只接触在一点(瞬心),而在接触点处他们的相对运动速度又等于零,所以它们作相对的纯滚动。如果把两瞬心线做成摩擦轮并且让它们作纯滚动,那么它们的运动规律和两个齿轮的运动规律是一样的。