摩擦焊原理简介
连续驱动摩擦焊基本原理
1.焊接过程
连续驱动摩擦焊接时,通常将待焊工件两端分别固定在旋转夹具和移动夹具内,工件被夹紧后,位于滑台上的移动夹具随滑台一起向旋转端移动,移动至一定距离后,旋转端工件开始旋转,工件接触后开始摩擦加热。此后,则可进行不同的控制,如时间控制或摩擦缩短量(又称摩擦变形量)控制。当达到设定值时,旋转停止,顶锻开始,通常施加较大的顶锻力并维持一段时间,然后,旋转夹具松开,滑台后退,当滑台退到原位置时,移动夹具松开,取出工件,至此,焊接过程结束。
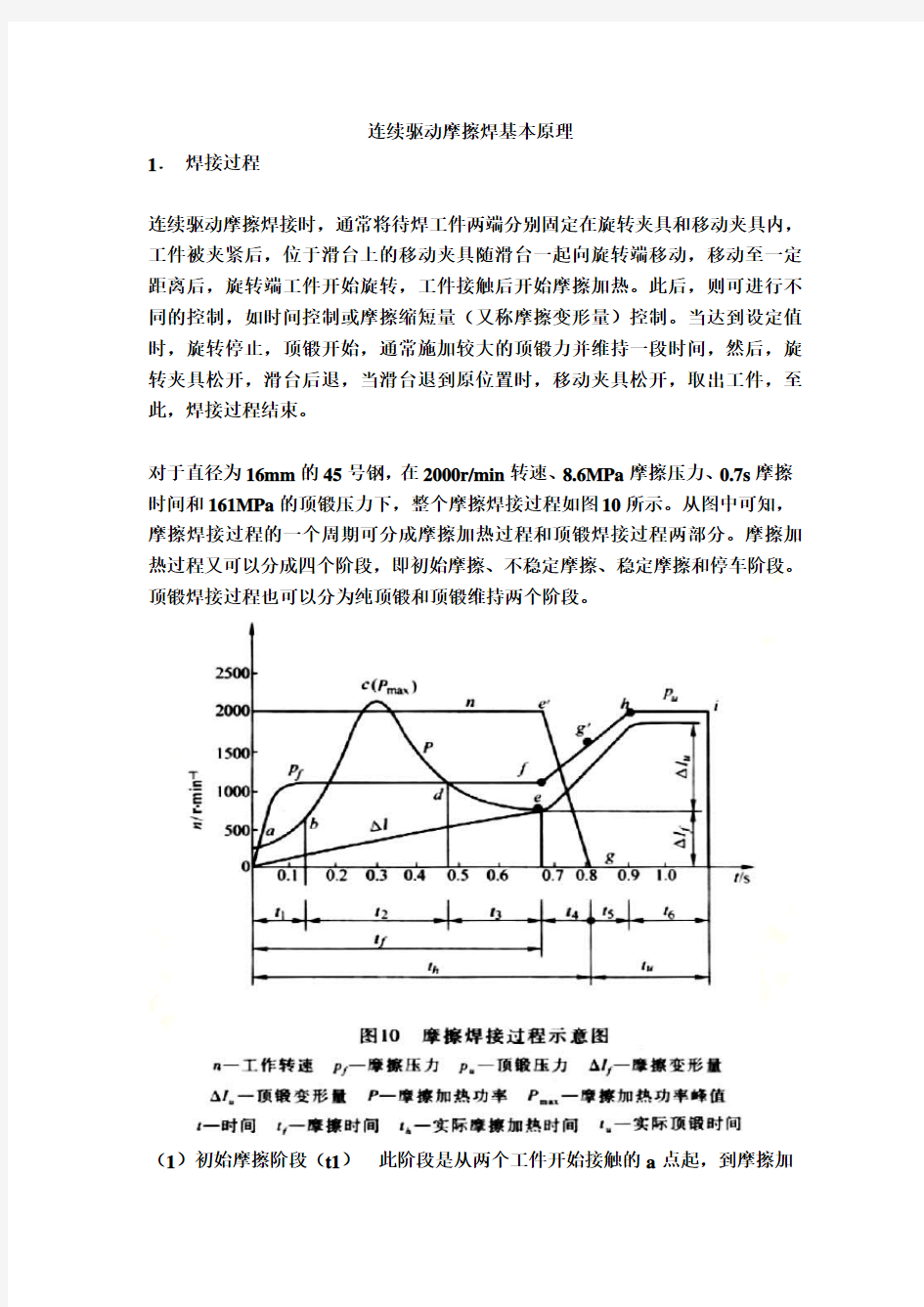
对于直径为16mm的45号钢,在2000r/min转速、8.6MPa摩擦压力、0.7s摩擦时间和161MPa的顶锻压力下,整个摩擦焊接过程如图10所示。从图中可知,摩擦焊接过程的一个周期可分成摩擦加热过程和顶锻焊接过程两部分。摩擦加热过程又可以分成四个阶段,即初始摩擦、不稳定摩擦、稳定摩擦和停车阶段。顶锻焊接过程也可以分为纯顶锻和顶锻维持两个阶段。
(1)初始摩擦阶段(t1)此阶段是从两个工件开始接触的a点起,到摩擦加
热功率显著增大的b点止。摩擦开始时,由于工件待焊接表面不平,以及存在
氧化膜、铁锈、油脂、灰尘和吸附气体等,使得摩擦系数很大。随着摩擦压力
的逐渐增大,摩擦加热功率也慢慢增加,最后摩擦焊接表面温度将升到200~
300℃左右。
在初始摩擦阶段,由于两个待焊工件表面互相作用着较大的摩擦压力和具有很高
的相对运动速度,使凸凹不平的表面迅速产生塑性变形和机械挖掘现象。塑性
变形破坏了界面的金属晶粒,形成一个晶粒细小的变形层,变形层附近的母材
也沿摩擦方向产生塑性变形。金属互相压入部分的挖掘,使摩擦界面出现同心
圆痕迹,这样又增大了塑性变形。因摩擦表面不平,接触不连续,以及温度升
高等原因,使摩擦表面产生振动,此时空气可能进入摩擦表面,使高温下的金
属氧化。但由于t1时间很知,摩擦表面的塑性变形和机械挖掘又可以破坏氧化
膜,因此,对接头的影响不大。当焊件断面为实心圆时,其中心的相对旋转速
度为零,外缘速度最大,此时焊接表面金属处于弹性接触状态,温度沿径向分
布不均匀,摩擦压力在焊接表面上呈双曲线分布,中心压力最大,外缘最小。
在压力和速度的综合影响下,摩擦表面的加热往往从距圆心半径2/3左右的地方
首先开始。
(2)不稳定摩擦阶段(t2)不稳定摩擦阶段是摩擦加热过程的一个主要阶段,
该阶段从摩擦加热功率显著增大的b点起,越过功率峰值c点,到功率稳定值
的d点为止。由于摩擦压力较初始摩擦阶段增大,相对摩擦破坏了焊接金属表
面,使纯净的金属直接接触。随着摩擦焊接表面的温度升高,金属的强度有所
降低,而塑性和韧性却有很大的提高,增大了摩擦焊接表面的实际接触面积。
这些因素都使材料的摩擦系数增大,摩擦加热功率迅速提高。当摩擦焊接表面
的温度继续增高时,金属的塑性增高,而强度和韧性都显著下降,摩擦加热功
率也迅速降低到稳定值d点。因此,摩擦焊接的加热功率和摩擦扭矩都在c点
呈现出最大值。在45号钢的不稳定摩擦阶段,待焊表面的温度由200~300℃升
高到1200~1300℃,而功率峰值出现在600~700℃左右。这时摩擦表面的机械
挖掘现象减少,振动降低,表面逐渐平整,开始产生金属的粘结现象。高温塑
性状态的局部金属表面互相焊合后,又被工件旋转的扭力矩剪断,并彼此过渡。
随着摩擦过程的进行,接触良好的塑性金属封闭了整个摩擦面,并使之与空气
隔开。
(3)稳定摩擦阶段(t3)稳定摩擦阶段是摩擦加热过程的主要阶段,其范围
从摩擦加热功率稳定值的d点起,到接头形成最佳温度分布的e点为止,这里
的e点也是焊机主轴开始停车的时间点(可称为e′点),也是顶锻压力开始上升的点(图10的?点)以及顶锻变形量的开始点。在稳定摩擦阶段中,工件摩擦表面的温度继续升高,并达到1300℃左右。这时金属的粘结现象减少,分子作用现象增强。稳定摩擦阶段的金属强度极低,塑性很大,摩擦系数很小,摩擦加热功率也基本上稳定在一个很低的数值。此外,其它连接参数的变化也趋于稳定,只有摩擦变形量不断增大,变形层金属在摩擦扭矩的轴向压力作用下,从摩擦表面挤出形成飞边,同时,界面附近的高温金属不断补充,始终处于动平衡状态,只是接头的飞边不断增大,接头的热影响区变宽。
(4)停车阶段(t4)停车阶段是摩擦加热过程至顶锻焊接过程的过渡阶段,是从主轴和工件一起开始停车减速的e′点起,到主轴停止转动的g点止。从图10可知,实际的摩擦加热时间从a点开始,到g点结束,即t?=t1+t2+t3+t4。尽管顶锻压力从?点施加,但由于工件并未完全停止旋转,所以g′点以前的压力,实质上还是属于摩擦压力。顶锻开始后,随着轴向压力的增大,转速降低,摩擦扭矩增大,并再次出现峰值,此值称为后峰值扭矩。同时,在顶锻力的作用下,接头中的高温金属被大量挤出,工件的变形量也增大。因此,停车阶段是摩擦焊接的重要过程,直接影响接头的焊接质量,要严格控制。
(5)纯顶锻阶段(t5)从主轴停止旋转的g(或g′)点起,到顶锻压力上升至最大位的h点止。在这个阶段中,应施加足够大的顶锻压力,精确控制顶锻变形量和顶锻速度,以保证获得优异的焊接质量。
(6)顶锻维持阶段(t6)该阶段从顶锻压力的最高点h开始,到接头温度冷却到低于规定值为止。在实际焊接控制和自动摩擦焊机的程序设计时,应精密控制该阶段的时间tu(tu=t3+t4)。在顶锻维持阶段,顶锻时间、顶锻压力和顶锻速度应相互配合,以获得合适的摩擦变形量△I?和顶锻变形量△Iu。在实际计算时,摩擦变形速度一般采用平均摩擦变形速度(△I?/t?),顶锻变形速度也采用其平均值〔△Iu/(t4+t5)〕。
总之,在整个摩擦焊接过程中,待焊的金属表面经历了从低温到高温摩擦加热,连续发生了塑性变形、机械挖掘、粘接和分子连接的过程变化,形成了一个存在于全过程的高速摩擦塑性变形层,摩擦焊接时的产热、变形和扩散现象都集中在变形层中。在停车阶段和顶锻焊接过程中,摩擦表面的变形层和高温区金属被部分挤碎排出,焊缝金属经受锻造,形成了质量良好的焊接接头。
2.摩擦焊接产热
摩擦焊接过程中,两工件摩擦表面的金属质点,在摩擦压力和摩擦扭矩的作用下,沿工件径向与切向力的合成方向作相对高速摩擦运动,在界面形成了塑性变形层。该变形层是把摩擦的机械功转变成热能的发热层,它的温度高、能量集中,具有很高的加热效率。
(1)摩擦加热功率摩擦加热功率的大小及其随摩擦时间的变化,决定了焊接温度及其温度场的分布,直接影响接头的加热过程、焊接生产率和焊接质量,同时也关系到摩擦焊机的设计与制造。摩擦加热功率就是焊接热源的功率,它的计算与分布如下:
对圆形的焊接工件,假设沿摩擦表面半径方向的摩擦压力p?和摩擦系数μ为常数。为了求出功率分布,在摩擦表面上取一半径为r的圆环,该环的宽度为dr (图11),其面积为dA,则dA=2πrdr,则作用在圆环上的摩擦力为
dF=p?μdA=2πp?μrdr (4)
以O点为圆心的摩擦扭矩为
dM=rdF=2πp?μr2dr (5)
圆环上的摩擦加热功率为
dP≈1.02dM×10-3n
(6)
摩擦加热功率沿接合面半径R方向上的分布dP/dr如图11所示。加热功率在圆心处为零,在外边缘最大。
将式(5)、式(6)积分,可以得到摩擦焊接表面上总的摩擦扭矩和加热功率为
M=2πp?μR3/3
(7)
P=2×10-3πp?nμR3/3
(8)
式中M——摩擦扭矩;
P——摩擦加热功率;
p?——摩擦压力;
n——工件转速;
μ——摩擦系数;
r——圆环半径;
R——待焊工件半径。
实际上p?(r)不是常数,在初始摩擦阶段和不稳定摩擦阶段的前期,摩擦表面还没有全面产生塑性变形,主要是弹性接触,摩擦压力在中心高,外圆低。因此沿摩擦焊接表面半径R的摩擦加热功率最大值不在外圆,而在距圆心2/3R左右的地方,这一点不仅符合计算结果,也被试验所证实。在稳定摩擦阶段,摩擦表面全部产生塑性变形,成为塑性接触时,p?(r)才可以认为等于常数。此外,μ(r)在初始摩擦阶段和不稳定摩擦阶段也不是常数,由高温金属组成的高速塑性变形层热源,在距圆心1/2~1/3半径处形成环状加热带,随着摩擦加热的进行,环状加热带向圆心和外圆迅速展开,当进入稳定摩擦阶段时,摩擦表面的温度才趋于平衡,此时可以认为μ(r)是常数。
摩擦表面上总的加热热量为
式中Q——接合面总的摩擦加热热量;
t——摩擦时间;
to——摩擦加热开始时间(设to=0);
tn——实际摩擦加热时间;
k——常数。
(2)摩擦焊接表面温度摩擦焊接表面的温度会直接影响接头的加热温度、温度分布、摩擦系数、接头金属的变形与扩散。其加热面的温度由摩擦加热功率和散热条件所决定。
在焊接圆断面工件时,摩擦焊接热源被认为是一个线性传播的连续均布的面状热源。如果不考虑向周围空间的散热,根据雷卡林的焊接热过程计算公式,同种金属摩擦焊接表面的温度为
式中T(O,t)——摩擦焊接表面温度(O表面热源中心,t是摩擦加热时间);
q2——单位面积上的加热热量;
λ——焊件热导率;
c——焊件热容。
在式(10)中,如果选定焊接所需要的温度为Tw,热源温度升高到Tw所需要的摩擦加热时间为t?′,则该式可以写成
t?′q22=cπλT2w=常数(11)
从式(11)可以看出,当Tw和t?′确定以后,能够计算出q2的数值,并可以根据q2的要求选择焊接参数。式(10)和式(11)适合于计算以稳定摩擦阶段为主的摩擦加热过程。
实际上,不论何种材料的摩擦焊接,摩擦表面的最高温度是有限制的,不能超过焊件材料的熔点,此外,在采用式(10)和式(11)进行运算时,还应该考虑到摩擦焊接表面温度与加热功率之间的内在联系、相互制约及摩擦加热功率随摩擦时间变化的特殊规律。
连续驱动摩擦焊基本原理 1.焊接过程 连续驱动摩擦焊接时,通常将待焊工件两端分别固定在旋转夹具和移动夹具内,工件被夹紧后,位于滑台上的移动夹具随滑台一起向旋转端移动,移动至一定距离后,旋转端工件开始旋转,工件接触后开始摩擦加热。此后,则可进行不同的控制,如时间控制或摩擦缩短量(又称摩擦变形量)控制。当达到设定值时,旋转停止,顶锻开始,通常施加较大的顶锻力并维持一段时间,然后,旋转夹具松开,滑台后退,当滑台退到原位置时,移动夹具松开,取出工件,至此,焊接过 程结束。 对于直径为16mm的45号钢,在2000r/min转速、8.6MPa摩擦压力、0.7s摩擦时间和161MPa的顶锻压力下,整个摩擦焊接过程如图10所示。从图中可知,摩擦焊接过程的一个周期可分成摩擦加热过程和顶锻焊接过程两部分。摩擦加热过程又可以分成四个阶段,即初始摩擦、不稳定摩擦、稳定摩擦和停车阶段。顶锻焊接过程也可以分为纯顶锻和顶锻维持两个阶段。 (1)初始摩擦阶段(t1)此阶段是从两个工件开始接触的a点起,到摩擦加热功率显着增大的b 点止。摩擦开始时,由于工件待焊接表面不平,以及存在氧化膜、铁锈、油脂、灰尘和吸附气体等,使得摩擦系数很大。随着摩擦压力的逐渐增大,摩擦加热功率也慢慢增加,最后摩擦焊接表 面温度将升到200~300℃左右。 在初始摩擦阶段,由于两个待焊工件表面互相作用着较大的摩擦压力和具有很高 的相对运动速度,使凸凹不平的表面迅速产生塑性变形和机械挖掘现象。塑性变形破坏了界面的金属晶粒,形成一个晶粒细小的变形层,变形层附近的母材也沿摩擦方向产生塑性变形。金属互相压入部分的挖掘,使摩擦界面出现同心圆痕迹,这样又增大了塑性变形。因摩擦表面不平,接触不连续,以及温度升高等原因,使摩擦表面产生振动,此时空气可能进入摩擦表面,使高温下的金属氧化。但由于t1时间很知,摩擦表面的塑性变形和机械挖掘又可以破坏氧化膜,因此,对接头的影响不大。当焊件断面为实心圆时,其中心的相对旋转速度为零,外缘速度最大,此时焊接表面金属处于弹性接触状态,温度沿径向分布不均匀,摩擦压力在焊接表面上呈双曲线分布,中心压力最大,外缘最小。在压力和速度的综合影响下,摩擦表面的加热往往从距圆心半径2/3 左右的地方首先开始。 (2)不稳定摩擦阶段(t2)不稳定摩擦阶段是摩擦加热过程的一个主要阶段,该阶段从摩擦加热功率显着增大的b点起,越过功率峰值c点,到功率稳定值的d点为止。由于摩擦压力较初始摩擦阶段增大,相对摩擦破坏了焊接金属表面,使纯净的金属直接接触。随着摩擦焊接表面的温度升高,金属的强度有所降低,而塑性和韧性却有很大的提高,增大了摩擦焊接表面的实际接触面积。这些因素都使材料的摩擦系数增大,摩擦加热功率迅速提高。当摩擦焊接表面的温度继续增高时,金属的塑性增高,而强度和韧性都显着下降,摩擦加热功率也迅速降低到稳定值d点。因此,摩擦焊接的加热功率和摩擦扭矩都在c点呈现出最大值。在45号钢的不稳定摩擦阶段,待焊表面的温度由200~300℃升高到1200~1300℃,而功率峰值出现在600~700℃左右。这时摩擦表面的机械挖掘现象减少,振动降低,表面逐渐平整,开始产生金属的粘结现象。高温塑性状态的
1.接头设计 1)接头设计原则 (1)对旋转式摩擦焊,至少有一个圆形截面。 (2)为了夹持方便、牢固,保证焊接过程不失稳,应尽量避免设计薄管、薄板接头。 (3)一般倾斜接头应与中心线成30°~45°的斜面。 (4)对锻压温度或热导率相差较大的材料,为了使两个零件的锻压和顶锻相对平衡,应调整界面的相对尺寸。 (5)对大截面接头,为了降低摩擦加热时的扭矩和功率峰值,采用端面导角的办法可使焊接时接触面积逐渐增加。 (6)如要限制飞边流出(如不能切除飞或不允许飞边暴露时),应预留飞边槽。 (7)对于棒-棒、和棒-板接头,中心部位材料被挤出形成飞边时,要消耗更多的能量,而焊缝中心部位对扭矩和弯曲应力的承担又很少,所 以,如果工作条件允许,可将一个或两个零件加工成具有中心孔洞, 这样既可用较小功率的焊机,又可提高生产率。 (8)采用中心部位突起的接头,见图1,可有效地避免中心未焊合。 (9)摩擦面要避免采用渗碳、渗氮等。 (10)为了防止由于轴向力(摩擦力、顶锻力)引起的滑退,通常在工件后面设置挡块。 (11)工件伸出夹头的尺寸要适当,被焊工件应尽可能有相同的伸出长度。
图1 接头表面突起设计标准 2)摩擦焊接头的形式 表1是摩擦焊接头的基本形式。 表1 摩擦焊接头的基本形式 接头形式简图接头形式简图 棒-棒管-板 管-管管-管板 棒-管棒-管板 矩形和多边形型 棒-板 材-棒或板 2.连续驱动摩擦焊的焊接参数 1)主要的焊接参数 可以控制的主要焊接参数有转速、摩擦压力、摩擦时间、摩擦变形量、停车时间、顶锻延时、顶锻时间、顶锻力、顶锻变形量。其中,摩擦变形量和顶锻变形量(总和为缩短量)是其它参数的综合反映。
目前最先进的焊接工艺,搅拌摩擦焊,你知道原理吗 搅拌摩擦焊是由英国焊接技术研究所于1991年发明的新型焊接技术,其原理如下图所示。 一根安装在主轴上的形状为蜗杆形式的搅拌针在一定压力下被插入焊缝位置,搅拌针的长度一般要比焊缝深度略浅,以此来保证主轴的轴肩能紧贴被焊接的工件表面。当工件与搅拌针和轴肩摩擦生热,焊缝附近的材料会因受热产生严重的塑性变形,但是,并不是熔化,只是成为一种“半流体”的状态,随着主轴带动搅拌针沿着焊缝的走向进给,搅拌针不断把已经处于“半流体”状态的材料搅拌到身后,当主轴离开后,这些材料将冷却固化,从而形成一条稳定的焊缝。
大家都知道,以铝合金和镁合金为代表的轻质合金是航空航天器的主要结构材料之一。然而这些轻质合金的可焊性都非常差,传统的各种熔焊工艺都无法从根本上杜绝热裂纹、气孔和夹渣等这些焊接缺陷的产生,需要靠操作者具有非常高超的技术和工艺才能保证焊接质量。并且,熔焊的高温会产生大量热量和有毒的烟气,这对操作者的身体健康也造成了很大的威胁。而搅拌摩擦焊的出现从根本上解决了这一系列问题。 其次,相较于传统熔焊工艺在焊缝附近形成重新铸造形态,搅拌摩擦焊由于主轴会给被焊接的工件部位施加一个很大的压力,所以在焊缝附近得到的是锻造形态,这种锻造形态组织比铸造形态组织致密得多,因而焊接后零件的机械性能也比传统熔焊工艺做出来的好得多。 而搅拌摩擦焊最大的优势体现在其本质是把机械能转化成焊接所需要的热能,所以可以用特定的公式相当准确的计算出焊接热及其引发的工件热变形的量,从而为事前的补偿和事后的纠正提供了几乎不依赖操作者经验的定量的依据,这是任何一种传统焊接工艺都望尘莫及的。
连续驱动摩擦焊机C-1摩擦焊机 发布时间:2010-08-25 07:42:09 查看:84次字体:【大中小】 C-1摩擦焊机
标签:驱动摩擦焊 连续驱动摩擦焊机C-20A-2摩擦焊机发布时间:2010-08-25 07:36:55 查看:96次字体:【大中小】 C-20A-2摩擦焊机 标签:驱动摩擦焊 惯性驱动摩擦焊机CG-1摩擦焊机发布时间:2010-08-25 07:25:18 查看:107次字体:【大中小】 CG-1摩擦焊机
惯性驱动摩擦焊机CG-250-J摩擦焊机发布时间:2010-08-25 07:22:53 查看:76次字体:【大中小】 CG-250-J摩擦焊机
惯性驱动摩擦焊机CG-400-J摩擦焊机 发布时间:2010-08-25 07:23:30 查看:103次字体:【大中小】 CG-400-J摩擦焊机 惯性驱动摩擦焊机CG-200-J摩擦焊机发布时间:2010-08-25 07:23:59 查看:81次字体:【大中小】 CG-200-J摩擦焊机
惯性驱动摩擦焊机CT-25摩擦焊机 发布时间:2010-08-25 07:24:25 查看:93次字体:【大中小】 CT-25摩擦焊机
惯性驱动摩擦焊机CG-6.3摩擦焊机 发布时间:2010-08-25 07:24:52 查看:86次字体:【大中小】 CG-6.3摩擦焊机 C20A摩擦焊机说明: 主机结构简介: 本焊机包括主机、液压、电气和润滑系统四部分,主机由床身、主轴箱、滑架、主没缸、夹具等主要部件组成。 主轴箱是重要部件之一,固定在铸造床身的左端,主轴用滚动轴承支承在箱体上,主轴上的四个8317单向推力球轴承组成二个串联轴承组,承受焊接过程中摩擦和顶锻压力,主轴的启动旋转和制动借助于片式离合器来实现,离合器由液压缸来驱动,当离合器与皮带轮(用滚动轴承支承在主轴上)接合时,旋转无能运动便通过可以在主轴上滑动的花键套传给了主轴,使主轴转动。当离合器和皮带轮脱开切断主轴旋转的动力,而与固定在主轴箱体上的摩擦片接合时,主轴被制动(如果液压系统调到先顶锻后制动时则施于工件的顶锻力,加速了主轴的制动)。皮带轮在生产的过程中始终不停的转动。它由八根B型三角带由主电机的皮带轮驱动。主电机安装在可调电机底板上,调节底板的张紧螺钉改变两皮带轮的中心距,便可调整皮带的张紧程度。 主轴箱通过二根导杠与床身右端的主没缸支座牢固的连接在一起,主轴箱的结构见下图: 主没缸的作用是带动与活塞杆连接的滑架实现进退运动,向前运动时,进行摩擦和顶锻加压。滑架体用四个可调铜套支承在导杠上,其结构见下图:
摩擦焊 1摩擦焊接概述: 摩擦焊接是在轴向压力与扭矩作用下,利用焊接接触端面之间的相对运动及塑性流动所产生的摩擦热及塑性变形热使接触面及其近区达到粘塑性状态并产生适当的宏观塑性变形,然后迅速顶锻而完成焊接的一种压焊方法。 摩擦焊的分类 2摩擦焊原理简介: 摩擦焊是利用金属焊接表面摩擦生热的一种热压焊接法。摩擦焊接时,通常将待焊工件两端分别固定在旋转夹具和移动夹具内,工件被夹紧后,位于滑台上的移动夹具随滑台一起向旋转端移动,移动至一定距离后,旋转端工件开始旋转,工件接触后开始摩擦加热。此后,则可进行不同的控制,如时间控制或摩擦缩短量(又称摩擦变形量)控制。当达到设定值时,旋转停止,顶锻开始,通常施加较大的顶锻力并维持一段时间,然后,旋转夹具松开,滑台后退,当滑台退到原位置时,移动夹具松开,取出工件,至此,焊接过程结束。
摩擦焊接是一种优质、高效、节能的固态连接技术,被广泛应用于航空、航天、石油、汽车等领域中。在摩擦焊接过程中,主轴转速、焊接压力、焊接时间以及焊接变形量是影响焊接质量的重要工艺参数。对这些参数实现精确的检测和控制,是获得优质焊接接头的保障。因此,研制一套控制精度高、响应速度快、具有丰富的数据处理能力且易于升一级和扩充的开放式控制系统具有重要意义。 摩擦焊流程示意图 摩擦焊具有下列优点: (1)焊接质量好而稳定。由于摩擦焊是一种热压焊接法,摩擦不仅能消除焊接表面的氧化膜, 同时在较大的顶锻压力作用下, 还能挤碎和挤出由于高速摩擦而产生的塑性变形层中氧化了的部分和其它杂质, 并使焊缝金属得到锻造组织。(2)摩擦焊不仅能焊接黑色金属、有色金属、同种异种金属, 而且还能焊接非金属材料, 如塑料、陶瓷等。 (3)对具有紧凑的回转断面的工件的焊接,都可用摩擦焊代替闪光焊、电阻焊及电弧焊。并可简化和减少锻件和铸件, 充分利用轧制的棒材和管材。 (4)焊件尺寸精度高。采用摩擦焊工艺生产的柴油发动机预燃烧室, 全长最大误差为士0.1毫米。专用的摩擦焊机可以保证焊件的长度公差为士0.2 毫米, 偏心度小于0.2毫米 (5)焊接生产率高, 易实现机械化、自动化, 操作技术简单。 (7)焊接费用低。由于摩擦焊节省电能、金属变形量小(焊接缩短量少)、接头焊前不需要清理、焊接时不需要填料和保护气体、接头上的飞边有时可以不必去除, 所以焊接费用显著降低。 (8)工作场地卫生, 无火花、弧光及有害气休。适于和其它先进的金属加工方法一起列入自动生产线。
摩擦焊工艺 1.接头设计 1)接头设计原则 (1)对旋转式摩擦焊,至少有一个圆形截面。 (2)为了夹持方便、牢固,保证焊接过程不失稳,应尽量避免设计薄管、薄板接头。 (3)一般倾斜接头应与中心线成30°~45°的斜面。 (4)对锻压温度或热导率相差较大的材料,为了使两个零件的锻压和顶锻相对平衡,应调整界面的相对尺寸。 (5)对大截面接头,为了降低摩擦加热时的扭矩和功率峰值,采用端面导角的办法可使焊接时接触面积逐渐增加。 (6)如要限制飞边流出(如不能切除飞或不允许飞边暴露时),应预留飞边槽。 (7)对于棒-棒、和棒-板接头,中心部位材料被挤出形成飞边时,要消耗更多的能量,而焊缝中心部位对扭矩和弯曲应力的承担又很少,所以,如果工作条件 允许,可将一个或两个零件加工成具有中心孔洞,这样既可用较小功率的焊机, 又可提高生产率。 (8)采用中心部位突起的接头,见图1,可有效地避免中心未焊合。 (9)摩擦面要避免采用渗碳、渗氮等。 (10)为了防止由于轴向力(摩擦力、顶锻力)引起的滑退,通常在工件后面设置挡块。 (11)工件伸出夹头的尺寸要适当,被焊工件应尽可能有相同的伸出长度。 图1 接头表面突起设计标准
2)摩擦焊接头的形式 表1是摩擦焊接头的基本形式。 表1 摩擦焊接头的基本形式 接头形式简图接头形式简图 棒-棒管-板 管-管管-管板 棒-管棒-管板 棒-板 矩形和多边形型材- 棒或板 2.连续驱动摩擦焊的焊接参数 1)主要的焊接参数 可以控制的主要焊接参数有转速、摩擦压力、摩擦时间、摩擦变形量、停车时间、顶锻延时、顶锻时间、顶锻力、顶锻变形量。其中,摩擦变形量和顶锻变形量(总和为缩短量)是其它参数的综合反映。 (1)转速和摩擦压力 转速和摩擦压力直接影响摩擦扭矩、摩擦加热功率、接头温度场、塑性层厚度以及摩擦变形速度等。 工件直径一定时,转速代表摩擦速度。实心圆截面工件摩擦界面上的平均摩擦速度是距圆心为2/3半径处的摩擦线速度。稳定摩擦扭矩与平均摩擦速度、摩擦压力的关系见图2。摩擦变形速度与平均摩擦速度、摩擦压力的关系见图3。转速对热影响区和飞边形状的影响见图4。
摩擦焊原理简介
连续驱动摩擦焊基本原理 1.焊接过程 连续驱动摩擦焊接时,通常将待焊工件两端分别固定在旋转夹具和移动夹具内,工件被夹紧后,位于滑台上的移动夹具随滑台一起向旋转端移动,移动至一定距离后,旋转端工件开始旋转,工件接触后开始摩擦加热。此后,则可进行不同的控制,如时间控制或摩擦缩短量(又称摩擦变形量)控制。当达到设定值时,旋转停止,顶锻开始,通常施加较大的顶锻力并维持一段时间,然后,旋转夹具松开,滑台后退,当滑台退到原位置时,移动夹具松开,取出工件,至此,焊接过程结束。 对于直径为16mm的45号钢,在2000r/min转速、8.6MPa摩擦压力、0.7s摩擦时间和161MPa的顶锻压力下,整个摩擦焊接过程如图10所示。从图中可知,摩擦焊接过程的一个周期可分成摩擦加热过程和顶锻焊接过程两部分。摩擦加热过程又可以分成四个阶段,即初始摩擦、不稳定摩擦、稳定摩擦和停车阶段。顶锻焊接过程也可以分为纯顶锻和顶锻维持两个阶段。 (1)初始摩擦阶段(t1)此阶段是从两个工件开始接触的a点起,到摩擦加
热功率显著增大的b点止。摩擦开始时,由于工件待焊接表面不平,以及存在 氧化膜、铁锈、油脂、灰尘和吸附气体等,使得摩擦系数很大。随着摩擦压力 的逐渐增大,摩擦加热功率也慢慢增加,最后摩擦焊接表面温度将升到200~ 300℃左右。 在初始摩擦阶段,由于两个待焊工件表面互相作用着较大的摩擦压力和具有很高 的相对运动速度,使凸凹不平的表面迅速产生塑性变形和机械挖掘现象。塑性 变形破坏了界面的金属晶粒,形成一个晶粒细小的变形层,变形层附近的母材 也沿摩擦方向产生塑性变形。金属互相压入部分的挖掘,使摩擦界面出现同心 圆痕迹,这样又增大了塑性变形。因摩擦表面不平,接触不连续,以及温度升 高等原因,使摩擦表面产生振动,此时空气可能进入摩擦表面,使高温下的金 属氧化。但由于t1时间很知,摩擦表面的塑性变形和机械挖掘又可以破坏氧化 膜,因此,对接头的影响不大。当焊件断面为实心圆时,其中心的相对旋转速 度为零,外缘速度最大,此时焊接表面金属处于弹性接触状态,温度沿径向分 布不均匀,摩擦压力在焊接表面上呈双曲线分布,中心压力最大,外缘最小。 在压力和速度的综合影响下,摩擦表面的加热往往从距圆心半径2/3左右的地方 首先开始。 (2)不稳定摩擦阶段(t2)不稳定摩擦阶段是摩擦加热过程的一个主要阶段, 该阶段从摩擦加热功率显著增大的b点起,越过功率峰值c点,到功率稳定值 的d点为止。由于摩擦压力较初始摩擦阶段增大,相对摩擦破坏了焊接金属表 面,使纯净的金属直接接触。随着摩擦焊接表面的温度升高,金属的强度有所 降低,而塑性和韧性却有很大的提高,增大了摩擦焊接表面的实际接触面积。 这些因素都使材料的摩擦系数增大,摩擦加热功率迅速提高。当摩擦焊接表面 的温度继续增高时,金属的塑性增高,而强度和韧性都显著下降,摩擦加热功 率也迅速降低到稳定值d点。因此,摩擦焊接的加热功率和摩擦扭矩都在c点 呈现出最大值。在45号钢的不稳定摩擦阶段,待焊表面的温度由200~300℃升 高到1200~1300℃,而功率峰值出现在600~700℃左右。这时摩擦表面的机械 挖掘现象减少,振动降低,表面逐渐平整,开始产生金属的粘结现象。高温塑 性状态的局部金属表面互相焊合后,又被工件旋转的扭力矩剪断,并彼此过渡。 随着摩擦过程的进行,接触良好的塑性金属封闭了整个摩擦面,并使之与空气 隔开。 (3)稳定摩擦阶段(t3)稳定摩擦阶段是摩擦加热过程的主要阶段,其范围 从摩擦加热功率稳定值的d点起,到接头形成最佳温度分布的e点为止,这里
搅拌摩擦焊在航天航空工业中的应用 【摘要】本文分析了搅拌摩擦焊(FSW)这项创新的焊接新技术的工艺特性及在航天、航空结构制造领域的应用,同时介绍了国内搅拌摩擦焊发展现状及对航空制造焊接教学实训的指导意义。 【关键词】摩擦焊的定义及分类;FSW原理及工艺特性;FSW在航天航空工业中的应用;国内发展现状 1991年,英国焊接研究所(TWI)发明了搅拌摩擦焊(FSW),这项杰出的焊接技术发明正在为世界制造技术的进步做出贡献。在国外,FSW已在船舶、轨道车辆、汽车工业、轻型商用飞机、世界宇航等诸多制造领域达到规模化、工业化的应用水平。作为一种新型制造产业,FSW正在世界范围内兴起! 1 摩擦焊的定义及分类 在压力作用下,通过待焊工件的摩擦界面及其附近温度升高,材料的变形抗力降低、塑性提高、界面氧化膜破碎,伴随着材料产生塑性流变,通过界面的分子扩散和再结晶而实现焊接的固态焊接方法,叫做摩擦焊。按与工件的相对运动形式可分为惯性摩擦焊、径向摩擦焊、搅拌摩擦焊、轨道摩擦焊、线性摩擦焊、摩擦堆焊等。 2 搅拌摩擦焊焊接原理及工艺特性 2.1 搅拌摩擦焊(FSW)焊接原理 FSW焊接过程是由一个高速旋转的圆柱体焊头伸入工件的接缝处与工件摩擦,使连接部位的材料温度升高软化,进行搅拌摩擦来完成焊接的,即防止了塑性状态材料的溢出,同时又起到清除表面氧化膜的作用。如图1所示。 2.2 搅拌摩擦焊(FSW)的工艺特性 2.2.1 FSW工艺参数 最重要的参数是:搅拌头的尺寸、圆周速度及与工件的相对移动速度。表1是几种有色金属常用的焊接速度。对于铝合金的焊接,焊头的旋转速度可以从几百~几千r/min。焊接速度在1~15mm/s之间。所以FSW可以很方便地实现自动控制。例如,对1100和6061冷轧板进行FSW,板厚6.3mm。搅拌头的直径为 6.3mm,长度为 5.8mm。当焊接速度为1~4mm/s,搅拌头的转速在200~2000r/min的范围改变时,形成优质焊缝的最佳转速是400r/min。在转速超过10000r/min,引进材料应变速率增加,会影响焊缝的再结晶过程,使其强度降低。 2.2.2 FSW焊接接头性能
摩擦焊应用的意义 ——09制造332 姚健在压力作用下,通过待焊工件的摩擦界面及其附近温度升高,材料的变形抗力降低、塑性提高、界面氧化膜破碎,伴随着材料产生塑性流变,通过界面的分子扩散和再结晶而实现焊接的固态焊接方法。 摩擦焊通常由如下四个步骤构成:1、机械能转化为热能;2、材料塑性变形;3、热塑性下的锻压力;4、分子间扩散再结晶。 摩擦焊技术经过长年的发展,已经发展出很多种摩擦焊接的分类:包括惯性摩擦焊、径向摩擦焊、线性摩擦焊、轨道摩擦焊、搅拌摩擦焊等。 摩擦焊相较传统熔焊最大的不同点在于整个焊接过程中,待焊金属获得能量升高达到的温度并没有达到其熔点,即金属是在热塑性状态下实现的类锻态固相连接。 相对于传统熔焊,摩擦焊具有诸多优点: 1、接头质量好且稳定。焊接过程由机器控制,参数设定后容易监控,重复性好,不依赖于操作人员的技术水平和工作态度。焊接过程不发生熔化,属固相热压焊,接头为锻造组织,因此焊缝不会出现气孔、偏析和夹杂、裂纹等铸造组织的结晶缺陷,焊接接头强度远大于熔焊、钎焊的强度,达到甚至超过母材的强度。 2、效率高。对焊件的要求通常不高,焊接设备容易自动化,可在流水线上生产,每件焊件时间以秒计,是其它焊接方法不能相比的。
3、节能、节材、低耗。所需功率仅及传统焊接工艺的1/5~1/15,不需焊条,焊剂、钎料、保护气体,不需要填加金属,也不需要消耗电极。 4、焊接性好。特别适合异种材料的焊接,与其他焊接方法相比,摩擦焊有得天独厚的优势,如钢和紫铜、钢和铝、钢和黄铜等等。 5、环保、无污染。焊接过程不产生烟尘或有害气体,不产生飞溅,没有弧光和火花,没有放射线。 由于以上这些优点,摩擦焊技术被誉为未来的绿色焊接术。经过了几十年的发展,摩擦焊技术在国内目前已经具备了包括工艺、设备、控制、检验等整套完备的技术规模。新颖的摩擦焊接技术不仅拓展了摩擦焊的应用范围.而且提高了焊接部件的整体性能和可靠性.使那些难焊或不能焊的材料也能获得高质量的焊缝.研究先进摩擦焊接技术具有重大的理论意义和工程应用价值.
特种焊接方法与工艺大作业——摩擦焊焊接技术 姓名:武颂昆 学号: 20 班级: 10焊接 天津滨海职业学院 2011年12月
摩擦焊焊接技术 一、摩擦焊的定义 摩擦焊(Friction Welding,FW)是利用焊件接触的端面相对运动中相互摩擦所产生的热,使端面达到热塑性状态,然后迅速顶锻,完成焊接的一种固相焊接方法。 二、摩擦焊的基本原理 摩擦焊焊接过程是在压力的作用下,相对运动的待焊材料之间产生摩擦,使界面及附近温度升高并达到热塑性状态,随着顶锻力的作用,界面氧化膜破碎,材料发生塑性变形与流动,通过界面元素扩散及再结晶冶金反应而形成接头。 焊接过程不加填充金属,不需焊剂,也不用保护气体,全部焊接过程只需几秒钟。 两焊件结合面之间在较高的压力下高速旋转相互摩擦产生了两个重要的效果:一是破坏了结合面的氧化膜或其他污物,使纯净金属暴露出来;另一个是摩擦生热,使结合面很快形成热塑性层。在随后的摩擦扭矩和轴向压力作用下这些破碎的氧化物和部分塑性层被挤出结合面外形成飞边,剩余的塑性变形金属就构成了焊缝金属,最后的顶锻使焊缝金属获得进一步锻造,形成了质量良好的焊接接头。 三、摩擦焊的特点 (1)焊接施工时间短,生产效率高。 (2)焊接热循环引起的焊接变形小,焊后尺寸精度高,不用焊后校形和消
除应力。 (3)机械化、自动化程度高,焊接质量稳定。当给定焊接条件后,操作简单,不需要特殊的焊接技术人员。 (4)适合各类异种材料的焊接,对常规熔化下不能焊接的铝-钢、铝-铜、钛-铜、金属间化合物-钢等都可以进行焊接。 (5)可以实现同直径、不同直径的棒材和管材的焊接。 (6)焊接时不产生烟雾、弧光以及有害气体等,不污染环境。同时,与闪光焊相比,电能节约5-10倍。 四、摩擦焊的应用 目前我国摩擦焊技术的应用比较广泛,可焊接直径3.0~120mm的工件以及8000mm2的大截面管件,同时还开发了相位焊和径向摩擦焊技术,以及搅拌摩擦焊技术。不仅可焊接钢、铝、铜,而且还成功焊接了高温强度级相差很大的异种钢和异种金属,以及形成低熔点共晶和脆性化合物的异种金属。如高速钢—碳钢、耐热钢—低合金钢、高温和金—合金钢、不锈钢—低碳钢、不锈钢—电磁铁以及铝—铜、铝—钢等。 近年来随着我国航空航天事业的发展,也加速了摩擦焊技术向这些领域的渗透,进行了航空发动机转子、起落架结构件、紧固件等材料(Ln718Ti17300MGH159GH4169)以及金属与陶瓷、复合材料、粉末高温合金的摩擦焊工艺试验研究,某些电工材料的钎焊工艺也开始用摩擦焊接所取代。如电磁铁—不锈钢、钨铜合金等。目前我国采用摩擦焊接方法焊接的产品有:锅炉行业的蛇形管摩擦焊接,阀门行业的阀门法兰和阀体密封座的摩擦焊接,轴瓦行业的止推边轴瓦的摩擦焊接,工具行业的钻头、铣刀、铰刀的刃部与柄部的摩擦焊接,汽车及机车行业发动机的双金属排气阀、气门顶杆、柴油机预热室喷咀、半轴、扭力管、内燃机增压器涡轮轴,潜水电泵转轴,紫铜不锈钢水接头,铝铜过渡接头,纺织机梭子芯,关节轴承,泥瓦工具,地质钻杆,石油钻杆、实心、空心抽油杆,航空发动机集成齿轮,木工多用机床上的刀轴等等。 我国现有六百余台摩擦焊机,绝大部分是连续驱动摩擦焊机。近年来由于加强了与德国KUKA、日东株氏会社、美国MTI公司等摩擦焊机制造公司的交流与引进样机,焊机先后采用了液压马达驱动的主轴系统,串联轴承组——平衡油缸
万方数据
搅拌摩擦焊接过程中,接头温度峰值始终处于材料熔化点以下(约为材料熔点的0.8),不会出现材料熔化,从而避免了常规熔焊工艺中因熔化一凝固现象的存在所造成的各种焊接缺陷。所以,搅拌摩擦焊是一种固相焊接技术。接头材料在高温软化状态下,由于搅拌 图1 搅拌摩擦焊基本原理及工艺过程 头的挤压而形成牢固的锻造细晶组织(与此不同的是,熔焊接头通常为晶粒粗大的铸造组织)。与其他焊接方法相比,搅拌摩擦焊具有以下特点: (1)搅拌摩擦焊是一种固相连接技术,接头性能优 异。 (2)焊前不需要开坡口,可以节省焊前准备工时。(3)焊接过程中不需要保护气,也不需要填充材料。 (4)焊接过程容易实现自动化,可以实现全位置焊 接,接头质量一致性好。 (5)焊接热输入小,从而导致焊接变形小、接头残 余应力水平低,是一种低应力,小变形焊接技术。 (6)焊接过程中无飞溅、无弧光,无辐射,是一种绿色焊接技术。 (7)焊接效率高、能耗低,是一种高效焊接技术。搅拌摩擦焊技术的这一系列特点使其对于以铝合金为代表的轻金属结构焊接具有非常重要的意义,在航空、航天、船舶、列车、汽车以及电力、电子等领域具有非常广阔的应用前景。 :.搅拌摩擦焊技术应用现状 搅拌摩擦焊作为一种轻合金材料连接的优选焊接 E口!唑堡笙!塑壁董皇塑型 参磊加工热加工 www,machinist.com,cn 技术,已经从技术研究迈向高层次的工程化和工业化应用阶段,如在美国的宇航制造工业、北欧的船舶制造工业和日本的高速列车制造等领域,搅拌摩擦焊技术都得到了广泛应用。搅拌摩擦焊技术1995年(通过申请专 利)进入中国,但是这项技术在中国真正获得发展却是在2002年以后——中心成立以来的这几年时间,它是以 中国自主研制的第一台专机搅拌摩擦焊设备的交付使用为标志的。2002年以来,搅拌摩擦焊技术已被迅速推广到国内的航空、航天、船舶、电力、电子以及汽车等领域,并在几十种产品型号中得到应用。 1.搅拌摩擦焊技术在航天型号产品研制中的应用 由于轻量化的需要,航天领域大量采用了铝合金 结构——最适合采用搅拌摩擦焊技术,从而使搅拌摩擦 焊技术最早在火箭、航天飞机等宇航产品中得到推广。国内则是首先在一些火箭、导弹等新型号武器装备研制中采用了搅拌摩擦焊技术,并配备了中国搅拌摩擦焊中 心自主研制的搅拌摩擦焊专机设备。 出于减重、减少成本和提高性能等方面的考虑, 我国导弹武器舱段的设计拟由原来的防锈铝(女115A06铝合金)改为高强铝合金(女IILYl2),但是这些材料采用熔焊的方法很难实现焊接,整体成形的成本又很 高,因此迫切需要像搅拌摩擦焊这样的新型固相焊接技术。 2004~2005年,中国搅拌摩擦焊中心与某航天制 造基地合作开展了这方面的研究,分别对与导弹武器整体舱段制造的纵缝连接,环缝连接等进行了应用开发,试制了多个型号的产品(图2所示为工艺验证模拟结构 件)并成功试飞。目前,搅拌摩擦焊技术已准备用于相 关军工产品的工业化生产。 万方数据
Φ15 45钢+45钢连续驱动摩擦焊焊接工艺概述 连续驱动摩擦焊是在外力作用下,利用焊件接触面之间的相对摩擦运动和塑形流动所产生的热量,使接触面金属件相互扩散、流动和动态再结晶而完成的固态连接方法。焊接过程不需要填充金属、焊剂或保护气体。连续驱动摩擦焊方法以优质、高效、节能、无污染的技术特点受到制造业的重视,特别是近几年来开发的搅拌摩擦焊、超塑性摩擦焊等新技术,使其在航空航天、能源、海洋开发等技术领域及石油化工、机械和汽车制造等产业部门得到了广泛应用。 一.母材技术状况 试件材料:45钢试件尺寸:Φ15×100mm 45号钢,是GB中的叫法,JIS中称为:S45C,ASTM中称为1045,080M46,DIN称为:C45。 物理性能:密度ρ:7.85g/cm3,弹性模量E:210MPa,泊松比μ:0.269。 力学性能: 抗拉强度:不小于600MPa ;屈服强度:不小于355MPa 。 伸长率:17% ;收缩率:40% ;冲击功:39J 。 钢材交货状态硬度:热轧钢:≤229HB 退火钢:≤197HB 推荐热处理温度:正火850℃淬火840℃回火600℃ 二、连续驱动摩擦焊原理 1、连续驱动摩擦焊原理如图1所示,是在摩擦压力的作用下被焊界面相互接触,通过相对运动进行摩擦,使机械能转变为热能,利用摩擦热去除界面的氧化物,在顶锻力的作用下形成可靠接头。该过程所产生的摩擦加热功率为 P=μkρυ 式中: P——摩擦加热功率;μ——摩擦系数; k——系数; ρ——摩擦压力; v——摩擦相对运动速度。
图1 连续驱动摩擦焊的工作原理图 连续驱动摩擦焊接时,通常将待焊工件两端分别固定在旋转夹具和移动夹具内,工件被夹紧后,位于滑台上的移动夹具随滑台一起向旋转端移动,移动至一定距离后,旋转端工件开始旋转,工件接触后开始摩擦加热。此后,则可进行不同的控制,如时间控制或摩擦缩短量(又称摩擦变形量)控制。当达到设定值时,旋转停止,顶锻开始,通常施加较大的顶锻力并维持一段时间,然后,旋转夹具松开,滑台后退,当滑台退到原位置时,移动夹具松开,取出工件,至此,焊接过程结束。 整个摩擦焊接过程如图2所示。从图中可知,摩擦焊接过程的一个周期可分成摩擦加热过程和顶锻焊接过程两部分。摩擦加热过程又可以分成四个阶段,即初始摩擦、不稳定摩擦、稳定摩擦和停车阶段。顶锻焊接过程也可以分为纯顶锻和顶锻维持两个阶段。 2、连续驱动摩擦焊机普通型连续驱动摩擦焊机主要由主轴系统、加压系统、机身、夹头、检测与控制系统以及辅助装置等六部分组成。连续驱动摩擦焊机参数,见表3。
摩擦焊 ?摩擦焊原理与分类 ?惯性摩擦焊 ?搅拌摩擦焊 ?摩擦焊设备 定义:摩擦焊是利用焊件相对摩擦运动产生的热量来实现材料可靠连接的一种压力焊方法。其焊接过程是在压力的作用下,相对运动的待焊材料之间产生摩擦,使界面及其附近温度升高并达到热塑性状态,随着顶锻力的作用界面氧化膜破碎,材料发生塑性变形与流动,通过界面元素扩散及再结晶冶金反应而形成接头 一、摩擦焊原理及分类 ?1.1 摩擦焊的分类 ?摩擦焊的方法很多,一般根据焊件的相对运动和工艺特点进行分类,主要方法如图1所示。在实 际生产中,连续驱动摩擦焊、相位控制摩擦焊、惯性摩擦焊和搅拌摩擦焊应用的比较普遍。 ?通常所说的摩擦焊主要是指连续驱动摩擦焊、相位控制摩擦焊、惯性摩擦焊和轨道摩擦焊,统称 为传统摩擦焊,它们的共同特点是靠两个待焊件之间的相对摩擦运动产生热能。而搅拌摩擦焊、嵌入摩擦焊、第三体摩擦焊和摩擦堆焊,是靠搅拌头与待焊件之间的相对摩擦运动产生热量而实现焊接。 1.2 摩擦焊原理 ?同种材质焊接时,最初界面接触点上产生犁削-粘合现象。由于单位压力很大,粘合区增多。继续 摩擦使这些粘合点产生剪切撕裂,金属从一个表面迁移到另一个表面。界面上的犁削-粘合-撕裂过程进行时,摩擦力矩增加时界面温度增高。当整个界面上形成一个连续塑性状态薄层后,摩擦力矩降低到一最小值。界面金属成为塑性状态并在压力作用下不断被挤出形成飞边,工件轴向长度也不断缩短 ?异种金属的机理比较复杂,除了犁削-粘合-剪切撕裂无力现象外,金属的物理与力学性能、相互 间固溶度及金属间化和物等,在结合机理中都会起作用,焊接时由于机械混合和扩散作用,在结合面附近很窄的区域内有可能发生一定程度的合金化,这一薄层的性能会对整个接头的性能有重要影响。机械混合和相互镶嵌对结合也会有一定作用。这种复杂性使得异种金属的摩擦焊接性很难预料。 1.2.1.连续驱动摩擦焊1.2.2 惯性摩擦焊1.2.3 相位摩擦焊1.2.4 径向摩擦焊1.2.5 摩擦堆焊1.2.6 线性摩擦焊1.2.7 搅拌摩擦焊 二、连续驱动摩擦焊 ?2.1 连续驱动摩擦焊基本原理 ? 2.1.1 焊接过程 ?连续驱动摩擦焊接时,通常将待焊工件两端分别固定在旋转夹具和移动夹具内,工件被夹紧后, 位于滑台上的移动夹具随滑台一起向旋转端移动,移动至一定距离后,旋转端工件开始旋转,工件接触后开始摩擦加热。此后,则可进行不同的控制,如时间控制或摩擦缩短量(又称摩擦变形量)控制。当达到设定值时,旋转停止,顶锻开始,通常施加较大的顶锻力并维持一段时间,然后,旋转夹具松开,滑台后退,当滑台退到原位置时,移动夹具松开,取出工件,至此,焊接过
搅拌摩擦焊的原理及其应用 摘要:摩擦焊是利用焊件接触面之间的相对摩擦运动和塑性变形所产生的热量使接触面及附近区域的材料达到热塑性状态,通过两侧材料间的相互扩散和动态再结晶而完成焊接,文章分析了搅拌摩擦焊的工作原理,并论述了其相关的应用。 关键词:搅拌摩擦焊焊接变形焊接工艺 引言 搅拌摩擦焊是英国焊接研究所发明的新型固态塑化焊接技术,是世界焊接技术发展史上自发明到工业应用时间跨度最短并且发展最快的一项连接技术。搅拌摩擦在材料的熔点以下进行,属于固相焊接,因此可以避免熔化焊所产生的气孔、裂纹、变形和氧化等问题。更重要的是焊接加热温度低,使焊接接头软化程度得到减轻,性能得到改善。 搅拌摩擦焊在国外铝合金车体制造方面得到了一定的应用,日本、法国、德国、瑞典等国车辆制造商己经采用搅拌摩擦焊技术制造列车车体,焊接接头性能得到改善,效果良好。国内搅拌摩擦焊在铁道车辆制造方面的应用尚属空白。文章分析了搅拌摩擦焊的工作原理,并论述了其相关的应用。 1 搅拌摩擦焊的工作原理及特点 搅拌摩擦焊接时,搅拌头一边高速旋转,一边沿着焊接方向前进,焊接过程中,搅拌头轴肩与被焊工件表面摩擦产生热量使工件达到塑性状态,塑性状态的金属在搅拌头旋转压力的挤压作用下,沿搅拌针从前进侧被搅拌到后退侧,随着搅拌头的移动,高度塑性变形的金属流向搅拌头的后部,冷却后形成焊缝。在实际工作中,搅拌摩擦焊的焊核由于受到搅拌头的高速旋转挤压作用,该区原始的组织晶粒被搅拌破碎,同时在轴肩与母材摩擦产生的热作用下,发生动态再结晶,由母材轧制状组织变为细小的等轴晶。热机械影响区在搅拌头的高速旋转作用下发生明显塑性变形,受到的摩擦热低于焊核,不足以使组织发生再结晶,因此只发生部分长大。热影响区在热循环作用下,组织晶粒发生二次长大,该区组织明显粗化,甚至比母材还粗大。焊接时搅拌头缓慢插入母材中,摩擦头的轴肩与板材的表面紧密接触并压入一定深度。焊接时摩擦头高速旋转并沿待焊板材的接缝向前运动。摩擦头的轴肩、搅拌针与试件摩擦生热,产生的摩擦热使搅拌针周围金属处于热塑性状态。在摩擦搅拌过程中轴肩一方面提供了大部分的摩擦热,另一方面轴肩的下压作用防止了塑性状态金属的溢出,搅拌针前方塑性状态下的金属在摩擦头的驱动下向后方流动。在搅拌头的摩擦搅拌作用下,搅拌针周围的材料形成塑性层,从而形成了搅拌摩擦焊焊缝,使待焊件焊为一个整体。同时,因为搅拌摩擦焊焊接温度在铝合金熔点以下,使其与普通熔化焊有不同的本质,相应地带来了一系列优点:
搅拌摩擦焊工艺特点及应用 火巧英胡伟 摘要: 本文主要讲述了搅拌摩擦焊的基本原理、工艺特点以及目前搅拌摩擦焊在铝合金车体上的应用。并对搅拌摩擦焊与弧焊工艺性进行对比分析,简要阐述了搅拌摩擦焊的发展趋势。 关键词: 搅拌摩擦焊; 基本原理; 金相;工艺 Friction stir welding characteristics and application Abstract :This paper describes the basic principles of friction stir welding, process characteristics and the application of FSW for the production of aluminium alloy carbody . And conducts a comparative analysis between friction stir welding and arc welding process .And has a brief description of the development trend of friction stir welding Keyword:FSW basic principles Metallographic Process 0 搅拌摩擦焊概述 搅拌摩擦焊(简称FSW)是一个涉及温度、力学、冶金及其相互作用的高度复杂过程,此过程中以摩擦界面处材料的塑性变形为主,界面处塑性金属流动的产生以及流动行为将会影响到热源的产生以及界面的扩散与动态回复再结晶,进而影响到焊接接头的质量。塑性金属层是否连续、完整和牢固地覆盖于摩擦界面,对能否形成无缺陷、优质的焊接接头具有重要影响。因此,研究搅拌摩擦焊工艺特点非常重要。通过对摩擦焊塑性连接工艺的研究,建立焊接参数对塑性流动的影响规律,对于确定焊接参数、优化焊接工艺、控制焊缝接头的组织和性能,进而提高焊接质量具有重要的实用价值。 1 搅拌摩擦焊工艺特点 搅拌摩擦焊的焊接过程如图1所示。搅拌针 伸进材料内部高速旋转进行摩擦和搅拌,搅拌头 的肩部与工件表面摩擦生热,并防止塑性状态材 料的溢出,同时可清除表面氧化膜的作用。搅拌 头高速旋转与工件间发生搅拌摩擦,利用摩擦所 产生的热,使工件达到热塑性状态,此时,搅拌 头沿着焊板进行接缝运动,由此形成了搅拌摩擦 焊的焊缝。图1 搅拌摩擦焊焊接示意图
搅拌摩擦焊 一、搅拌摩擦焊的定义及原理 搅拌摩擦焊(Friction Stir Welding,简称FSW)是基于摩擦焊技术的基本原理,由英国焊接研究所(TWI)于1991年发明的一种新型固相连接技术。与常规摩擦焊相比,其不受轴类零件的限制,可进行板材的对接、搭接、角接及全位置焊接。与传统的熔化焊方法相比,搅拌摩擦焊接头不会产生与熔化有关的如裂纹、气孔及合金元素的烧损等焊接缺陷;焊接过程中不需要填充材料和保护气体,使得以往通过传统熔焊方法无法实现焊接的材料通过搅拌摩擦焊技术得以实现连接;焊接前无须进行复杂的预处理,焊接后残余应力和变形小;焊接时无弧光辐射、烟尘和飞溅,噪音低;因而,搅拌摩擦焊是一种经济、高效、高质量的“绿色”焊接技术,被誉为“继激光焊后又一次革命性的焊接技术”。 搅拌摩擦焊方法与常规摩擦焊一样,搅拌摩擦焊也是利用摩擦热作为焊接热源。 不同之处在于搅拌摩擦焊焊接过程是由一个圆柱体形状的焊头(伸入工件的接缝处,通过焊头的高速旋转,使其与焊接工件材料摩擦,从而使连接部位的材料温度升高软化同时对材料进行搅拌摩擦来完成焊接的。 二.搅拌摩擦焊焊接过程 搅拌摩擦焊是利用摩擦热作为焊接热源的一种固相连接方法,但与常规摩擦焊有所不同。在进行搅拌摩擦焊接时,首先将焊件牢牢地固定在工作平台上,然后,搅拌焊头高速旋转并将搅拌焊针插入焊件的接缝处,直至搅拌焊头的肩部与焊件表面紧密
接触,搅拌焊针高速旋转与其周围母材摩擦产生的热量和搅拌焊头的肩部与焊件表面摩擦产生的热量共同作用,使接缝处材料温度升高而软化,同时,搅拌焊头边旋转边沿着接缝与焊件作相对运动,搅拌焊头前面的材料发生强烈的塑性变形。随着搅拌焊头向前移动,前沿高度塑性变形的材料被挤压到搅拌焊头的背后。在搅拌头轴肩与焊件表层摩擦产热和锻压共同作用下,形成致密的固相连接接头。搅拌摩擦焊接过程如图所示: 三.搅拌摩擦焊工艺 (一)、搅拌摩擦焊接头形式 搅拌摩擦焊可以实现棒材一棒材、板材一板材的可靠连接,接头形式可以设计为对接、搭接、角接及T形接头,可进行环形、圆形、非线性和立体焊缝的焊接。由于重力对这种固相焊接方法没有影响,搅拌摩擦焊可以用于全位置焊接,如横焊、立焊、仰焊、环形轨道自动焊等。
摩擦焊的应用 摩擦焊接是利用金属焊接表面摩擦加热的一种热压焊接方法. 摩擦焊技术的主要优点归结为如下几个方面:(1)接头质量好且稳定。焊接过程由机器控制,参数设定后容易监控,重复性好,不依赖于操作人员的技术水平和工作态度。焊接过程不发生熔化,属固相热压焊,接头为缎造组织,因此焊缝不会出现气孔、偏析和夹杂,裂纹等铸造组织的结晶缺陷,焊接接头强度远大于熔焊、钎焊的强度,达到甚至超过母材的强度;(2)效率高。对焊件准备通常要求不高,焊接设备容易自动化,可在流水线上生产,每件焊接时间以秒计,一般只需零点几秒至几十秒,是其它焊接方法如熔焊、钎焊不能相比的;(3)节能、节材、低耗。所需功率仅及传统焊接工艺的1/5~1/15,不需焊条、焊剂、钎料、保护气体,不需填加金属,也不需消耗电极;(4)焊接性好。特别适合异种材料的焊接,与其它焊接方法相比,摩擦焊有得天独厚的优势,如钢和紫铜、钢和铝、钢和黄铜等等;(5)环保,无污染。焊接过程不产生烟尘或有害气体,不产生飞溅,没有孤光和火花,没有放射线。 摩擦焊方法 (1)相位摩擦焊 可实现有相位要求的工件的摩擦焊接,扩大了摩擦焊的应用领域。目前生产中对如六方形断 面的零件、八方钢、汽车操作杆、花键轴、拨叉、两端带法兰的轴等均要求采用相位摩擦焊。在 电控技术和机械技术高度发展的前提下,为大吨位相位摩擦焊机的研制提供了可能。 (2)线性摩擦焊 线性摩擦焊技术,是两个工件以一定的频率和振幅进行往复运动产生热量进行的焊接,它可 以将方形、圆形、多边形截面的金属或塑料焊接在一起。它可以焊接更不规则截面的构件,象叶 片与涡轮等,以后要深入开展线性摩擦焊机原理、振动系统动力学等的研究,为研制大吨位的性 摩擦焊机作准备。 (3)径向摩擦焊 径向摩擦焊由于其引入中间旋转加压圆环,不仅改变了摩擦面的方向,焊件也由相对旋转加 压变为相对固定加压,它非常适合于长管子的焊接,同时它还可以把薄壁铜环焊接到弹体外壁上, 能够使军工产品升级换代。今后要加强径向摩擦焊机理和瞬间大流量液压系统的研究,为大吨位 径向摩擦焊机的研制奠定理论基础。 (4)搅拌摩擦焊
和摩擦热使工件连接在一起的固态 连接方法。 线性摩擦焊是20世纪90年代中期兴起的一种新型固态焊接技术,它突破了旋转式摩擦焊对被焊工件外形轴对称的限制,大大的扩展了摩擦焊接的应用领域。线性摩擦焊具有自清理、自保护的作用。 材料采用钛合金TC4轧制板材。试样尺寸为13mm×8mm×45mm的长方体,焊接面(13mm×8mm)为线切割面。试验采用自制的线性摩擦焊机。采用的工艺参数为:振动频率13.6~43Hz,摩擦压力2.75~3.2atm(压力表指示值),顶锻力2.8~3.4atm(压力表指示值),摩擦时间10~20s,振幅2mm。 焊后试件沿面Ⅰ、面Ⅱ(如图1所示)剖开,通过剖面Ⅰ、面Ⅱ可以分别观察到摩擦横截面(与试件往复运动方向垂直)和纵截面(与试件往复运动方向平行)这两个方向上的焊缝形状。 通过对焊接过程和接头质量的观察分析,可以发现:摩擦压力和往复运动频率是焊接热输入的主要影响因素。当摩擦压力和往复运动频率增加时,焊接热量输入也随之显著增加。
图1 试件剖面示意图 由于材料变形的局部性和不均匀性,压力过大则会影响试件往复运动的稳定性,同时也会增加塑性金属的流出量,使飞边增大,因此,不能采用太大的压力值。在保证运动平稳的条件下,提高往复运动的频率是增加热输入和提高焊缝质量最有效的方法。 摩擦时间也是线性摩擦焊接过程中的一个重要参数,但延长摩擦时间不是增加热量输入的最有效方法。因为热传导、对流及高温塑性金属的挤出等因素的存在,使得焊接过程中存在一热输入热输出的平衡点。在热平衡之前,增加摩擦时间对增加热输入有效,而在热平衡点之后,增加摩擦时间对热输入作用不大。 顶锻是摩擦焊接的最后一个环节,顶锻力也是影响焊缝成型的重要因素。在摩擦过程中,金属摩擦副之间形成一层高温粘塑性层,它是摩擦表面的“粘结”介质,通过顶锻使金属摩擦副牢固结合。若顶锻力过大,使粘结介质大量被挤出,焊接效果反而下降。焊缝成型与飞边的形成 摩擦界面横截面和纵截面的形状分别如图2 (a)、(b)所示,图3是部分放大的纵向飞边。 (a)摩擦界面横截面的形貌 (b) 摩擦界面纵截面的形貌 图2 TC4摩擦焊焊缝形状