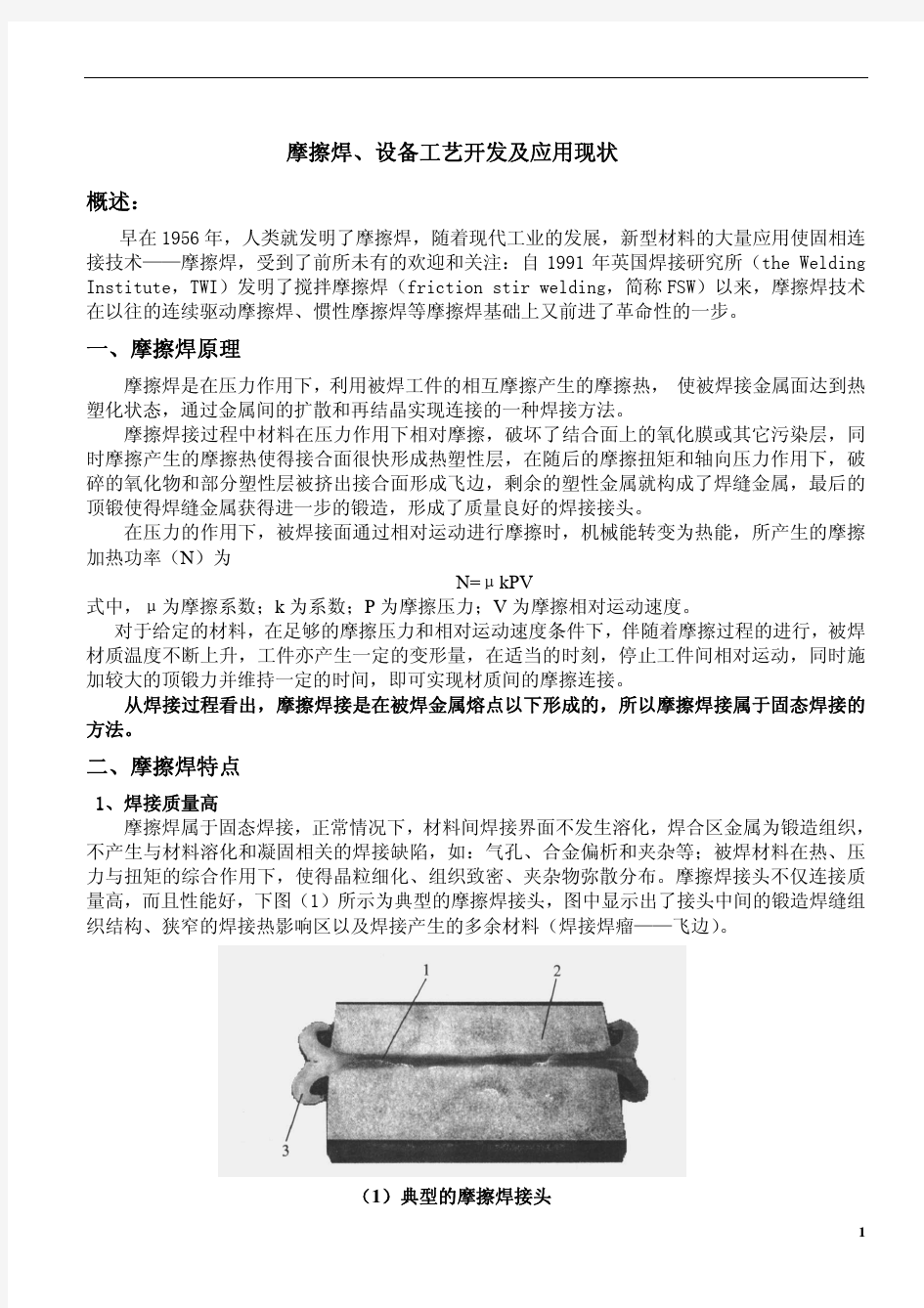

1.接头设计 1)接头设计原则 (1)对旋转式摩擦焊,至少有一个圆形截面。 (2)为了夹持方便、牢固,保证焊接过程不失稳,应尽量避免设计薄管、薄板接头。 (3)一般倾斜接头应与中心线成30°~45°的斜面。 (4)对锻压温度或热导率相差较大的材料,为了使两个零件的锻压和顶锻相对平衡,应调整界面的相对尺寸。 (5)对大截面接头,为了降低摩擦加热时的扭矩和功率峰值,采用端面导角的办法可使焊接时接触面积逐渐增加。 (6)如要限制飞边流出(如不能切除飞或不允许飞边暴露时),应预留飞边槽。 (7)对于棒-棒、和棒-板接头,中心部位材料被挤出形成飞边时,要消耗更多的能量,而焊缝中心部位对扭矩和弯曲应力的承担又很少,所 以,如果工作条件允许,可将一个或两个零件加工成具有中心孔洞, 这样既可用较小功率的焊机,又可提高生产率。 (8)采用中心部位突起的接头,见图1,可有效地避免中心未焊合。 (9)摩擦面要避免采用渗碳、渗氮等。 (10)为了防止由于轴向力(摩擦力、顶锻力)引起的滑退,通常在工件后面设置挡块。 (11)工件伸出夹头的尺寸要适当,被焊工件应尽可能有相同的伸出长度。
图1 接头表面突起设计标准 2)摩擦焊接头的形式 表1是摩擦焊接头的基本形式。 表1 摩擦焊接头的基本形式 接头形式简图接头形式简图 棒-棒管-板 管-管管-管板 棒-管棒-管板 矩形和多边形型 棒-板 材-棒或板 2.连续驱动摩擦焊的焊接参数 1)主要的焊接参数 可以控制的主要焊接参数有转速、摩擦压力、摩擦时间、摩擦变形量、停车时间、顶锻延时、顶锻时间、顶锻力、顶锻变形量。其中,摩擦变形量和顶锻变形量(总和为缩短量)是其它参数的综合反映。
摩擦焊 1摩擦焊接概述: 摩擦焊接是在轴向压力与扭矩作用下,利用焊接接触端面之间的相对运动及塑性流动所产生的摩擦热及塑性变形热使接触面及其近区达到粘塑性状态并产生适当的宏观塑性变形,然后迅速顶锻而完成焊接的一种压焊方法。 摩擦焊的分类 2摩擦焊原理简介: 摩擦焊是利用金属焊接表面摩擦生热的一种热压焊接法。摩擦焊接时,通常将待焊工件两端分别固定在旋转夹具和移动夹具内,工件被夹紧后,位于滑台上的移动夹具随滑台一起向旋转端移动,移动至一定距离后,旋转端工件开始旋转,工件接触后开始摩擦加热。此后,则可进行不同的控制,如时间控制或摩擦缩短量(又称摩擦变形量)控制。当达到设定值时,旋转停止,顶锻开始,通常施加较大的顶锻力并维持一段时间,然后,旋转夹具松开,滑台后退,当滑台退到原位置时,移动夹具松开,取出工件,至此,焊接过程结束。
摩擦焊接是一种优质、高效、节能的固态连接技术,被广泛应用于航空、航天、石油、汽车等领域中。在摩擦焊接过程中,主轴转速、焊接压力、焊接时间以及焊接变形量是影响焊接质量的重要工艺参数。对这些参数实现精确的检测和控制,是获得优质焊接接头的保障。因此,研制一套控制精度高、响应速度快、具有丰富的数据处理能力且易于升一级和扩充的开放式控制系统具有重要意义。 摩擦焊流程示意图 摩擦焊具有下列优点: (1)焊接质量好而稳定。由于摩擦焊是一种热压焊接法,摩擦不仅能消除焊接表面的氧化膜, 同时在较大的顶锻压力作用下, 还能挤碎和挤出由于高速摩擦而产生的塑性变形层中氧化了的部分和其它杂质, 并使焊缝金属得到锻造组织。(2)摩擦焊不仅能焊接黑色金属、有色金属、同种异种金属, 而且还能焊接非金属材料, 如塑料、陶瓷等。 (3)对具有紧凑的回转断面的工件的焊接,都可用摩擦焊代替闪光焊、电阻焊及电弧焊。并可简化和减少锻件和铸件, 充分利用轧制的棒材和管材。 (4)焊件尺寸精度高。采用摩擦焊工艺生产的柴油发动机预燃烧室, 全长最大误差为士0.1毫米。专用的摩擦焊机可以保证焊件的长度公差为士0.2 毫米, 偏心度小于0.2毫米 (5)焊接生产率高, 易实现机械化、自动化, 操作技术简单。 (7)焊接费用低。由于摩擦焊节省电能、金属变形量小(焊接缩短量少)、接头焊前不需要清理、焊接时不需要填料和保护气体、接头上的飞边有时可以不必去除, 所以焊接费用显著降低。 (8)工作场地卫生, 无火花、弧光及有害气休。适于和其它先进的金属加工方法一起列入自动生产线。
摩擦焊工艺 1.接头设计 1)接头设计原则 (1)对旋转式摩擦焊,至少有一个圆形截面。 (2)为了夹持方便、牢固,保证焊接过程不失稳,应尽量避免设计薄管、薄板接头。 (3)一般倾斜接头应与中心线成30°~45°的斜面。 (4)对锻压温度或热导率相差较大的材料,为了使两个零件的锻压和顶锻相对平衡,应调整界面的相对尺寸。 (5)对大截面接头,为了降低摩擦加热时的扭矩和功率峰值,采用端面导角的办法可使焊接时接触面积逐渐增加。 (6)如要限制飞边流出(如不能切除飞或不允许飞边暴露时),应预留飞边槽。 (7)对于棒-棒、和棒-板接头,中心部位材料被挤出形成飞边时,要消耗更多的能量,而焊缝中心部位对扭矩和弯曲应力的承担又很少,所以,如果工作条件 允许,可将一个或两个零件加工成具有中心孔洞,这样既可用较小功率的焊机, 又可提高生产率。 (8)采用中心部位突起的接头,见图1,可有效地避免中心未焊合。 (9)摩擦面要避免采用渗碳、渗氮等。 (10)为了防止由于轴向力(摩擦力、顶锻力)引起的滑退,通常在工件后面设置挡块。 (11)工件伸出夹头的尺寸要适当,被焊工件应尽可能有相同的伸出长度。 图1 接头表面突起设计标准
2)摩擦焊接头的形式 表1是摩擦焊接头的基本形式。 表1 摩擦焊接头的基本形式 接头形式简图接头形式简图 棒-棒管-板 管-管管-管板 棒-管棒-管板 棒-板 矩形和多边形型材- 棒或板 2.连续驱动摩擦焊的焊接参数 1)主要的焊接参数 可以控制的主要焊接参数有转速、摩擦压力、摩擦时间、摩擦变形量、停车时间、顶锻延时、顶锻时间、顶锻力、顶锻变形量。其中,摩擦变形量和顶锻变形量(总和为缩短量)是其它参数的综合反映。 (1)转速和摩擦压力 转速和摩擦压力直接影响摩擦扭矩、摩擦加热功率、接头温度场、塑性层厚度以及摩擦变形速度等。 工件直径一定时,转速代表摩擦速度。实心圆截面工件摩擦界面上的平均摩擦速度是距圆心为2/3半径处的摩擦线速度。稳定摩擦扭矩与平均摩擦速度、摩擦压力的关系见图2。摩擦变形速度与平均摩擦速度、摩擦压力的关系见图3。转速对热影响区和飞边形状的影响见图4。
摩擦力的方向判断及大小计算 一. 教学内容: 摩擦力大小、方向的确定 二、考点点拨 摩擦力是三种基本性质力中最难判定的力,它的大小和方向的确定是高中阶段的重点和难点,物体在各种运动状态下摩擦力的分析在每年的高考中都有所体现,是高考的必考内容。 三、跨越障碍 摩擦处处、时时存在,在初中我们知道,摩擦分为静摩擦、滑动摩擦和滚动摩擦三类,我们已知道了摩擦的基础知识,我们今天将进一步来研究摩擦的相关知识。 (一)滑动摩擦力 1、产生:两个相互接触的物体发生相对运动时产生的摩擦力。 2、产生条件:1)接触面粗糙 2)相互接触且有形变即相互间有弹力 3)物体间有相对运动 3、方向:跟接触面相切,并跟物体相对运动方向相反。 例1:一物体在水平面上向右运动,试确定其摩擦力的方向。 物体相对于地面的方向是水平向右,所以摩擦力方向水平向左 例2:A、B两物体叠放在一起,两物体都沿水平面向右运动,A的速度为,B的速度为, 并且<,问A、B两物体间的摩擦力的方向如何? 虽然A的速度方向水平向右,但由于<,所以A相对于和它接触的物体B而言,是向左运动的,即相对运动方向是向左的,故A受到的B对它的摩擦力是水平向右的。 注:1、由例2可以看到,物体的运动方向和相对运动方向是有区别的。 2、摩擦力是和相对运动方向相反,不是和运动方向相反,所以我们在判断滑动摩擦力的方向时,一定要先找出该物体相对于和它接触的物体的运动方向,才能判断滑动摩擦力的方向,不能仅凭运动方向来判断摩擦力方向。
例3:传送带顺时针方向运动,现将一物体静止地放上传送带,则物体在放上传送带的一段时间内所受滑动摩擦力的方向如何? 物体静止地放上传送带,传送带水平部分向右运动,则物体相对于传送的运动方向向左,所以受到的滑动摩擦力方向水平向右。 4、大小:经过试验,我们得出,物体受到的滑动摩擦力的大小和物体间的压力有关,还和物体间接触面的材料性质有关。 即f=μN μ是一个没有单位,小于1的常数,叫做动摩擦因数。它与两物体的材料性质,表面状况有关,和接触面积无关。 N是物体对接触面的正压力即垂直于接触面的弹力。 例4:一质量为5kg的物体在水平面上向右运动,它和水平面间的μ为0.6,则此时物体受到的滑动摩擦力多大? 解:此时物体对水平面的压力大小等于物体所受的重力 所以f=μN=0.6×50=30N 方向水平向左 注:这道例题中压力恰好等于重力的大小,但要特别注意,压力并不总等于重力,压力和重力是不相同的两个力。 5、作用效果:总是起着阻碍物体间相对运动的作用。 (二)静摩擦力 1、定义:两相对静止的相互接触的物体间,由于存在相对运动的趋势而产生的摩擦力。 2、静摩擦力产生的条件:1)两物体直接接触 2)接触处粗糙且相互间有弹力 3)两物体有相对运动的趋势 3、静摩擦力的方向:总是和接触面相切,并且总跟物体的相对运动趋势方向相反。 判断两物体间是否有相对运动的趋势,一般采用假设法,即假设接触面光滑,看相接触的两物体间是否有相对运动,如果有,此方向即为相对运动的趋势方向;如果没有,说明物体间无相对运动趋势。 例5:判断下面两个静止物体受到的静摩擦力的方向 (1)
摩擦力的求法 求解物体所受的摩擦力,首先要弄清楚物体所受摩擦力的性质。即物体受到的是静摩擦力还是滑动摩擦力。 所谓静摩擦力,就是物体和与它接触的物体保持相对静止时所受到的摩擦力。此力产生 的条件有四:○ 1两个物体相互接触○2相互接触的物体之间有弹力○3接触面不光滑○4物体之间有相对滑动的趋势。 物体受到的静摩擦力是一个变力,它将随着外力的变化或随着物体运动状态的变化而变化。因此在计算物体所受到的静摩擦力大小时,要根据物体所处的不同状态利用不同的方法进行计算。 a) 如果物体处于静止或匀速直线运动状态,要根据共点力作用下物体的平衡条件进行求解。 b) 如果物体处于加速直线运动状态,则要根据牛顿第二定律进行求解。 例1、如图所示,放在水平地面上的物体在水平拉力F 作用下处于静止,则物体所受的摩擦力大小是多少?方向朝哪? 解:通过受力分析知:物体受到四个力的作用,重力;支持 力;拉力和摩擦力。根据共点力作用下物体的平衡条件知, 物体所受的摩擦力大小等于物体所受的拉力。即f = F 例2、如图所示,水平地面上的物体在斜向上与水平方 向成θ角的拉力作用下处于静止。求物体受到的摩擦力大小。 解:通过受力分析知,物体受到四个力的作用,重力;支持力; 拉力和摩擦力。由于物体处于静止状态,根据共点力作用下物 体的平衡条件知:???=+=G F N f F θθsin cos 因此物体所受的摩擦力等于Fcos θ = f 。 如果物体和与它接触的物体保持相对静止,而一起作加速运动时,要根据牛顿第二定律进行求解。 例3、质量为m 的物体放在质量为M 的另一物体上,在光滑的水平 面上一起向右作匀加速直线运动,它们运动的加速度大小为a ,求质量为 m 的物体所受的摩擦力是多大? 解:分析m 的受力情况知,m 受到三个力的作用,重力;支持力; 摩擦力。 其中重力和支持力在竖直方向上是一对平衡力,大小相等;而物体所受 的静摩擦力才是物体作匀加速直线运动的原因,根据牛顿第二定律知:f = ma 例4、质量为m 的物体放在一水平转台上,距中心转轴的距离为r ,当物 体随转台一起以角速度ω匀速成转动时,求物体受到的摩擦力大小? 解:分析物体受力知,物体受到三个力的作用。重力;支持力;和指向圆心的摩擦力。重力和支持力在竖直方向是一对平衡力,大小相等。而物体受到静摩擦力才是物体产生向心 加速度的原因。根据牛顿第二定律知:r m f 2 ω= 应当注意的是,物体所受到的静摩擦力跟物体间的正压力没有关系。 滑动摩擦力,是指物体相对于和它接触的物体有相对滑动时,在接触面处 产生的摩擦力。滑动摩擦力的产生应具备四个条件:○ 1两物体相接触○2相
目前最先进的焊接工艺,搅拌摩擦焊,你知道原理吗 搅拌摩擦焊是由英国焊接技术研究所于1991年发明的新型焊接技术,其原理如下图所示。 一根安装在主轴上的形状为蜗杆形式的搅拌针在一定压力下被插入焊缝位置,搅拌针的长度一般要比焊缝深度略浅,以此来保证主轴的轴肩能紧贴被焊接的工件表面。当工件与搅拌针和轴肩摩擦生热,焊缝附近的材料会因受热产生严重的塑性变形,但是,并不是熔化,只是成为一种“半流体”的状态,随着主轴带动搅拌针沿着焊缝的走向进给,搅拌针不断把已经处于“半流体”状态的材料搅拌到身后,当主轴离开后,这些材料将冷却固化,从而形成一条稳定的焊缝。
大家都知道,以铝合金和镁合金为代表的轻质合金是航空航天器的主要结构材料之一。然而这些轻质合金的可焊性都非常差,传统的各种熔焊工艺都无法从根本上杜绝热裂纹、气孔和夹渣等这些焊接缺陷的产生,需要靠操作者具有非常高超的技术和工艺才能保证焊接质量。并且,熔焊的高温会产生大量热量和有毒的烟气,这对操作者的身体健康也造成了很大的威胁。而搅拌摩擦焊的出现从根本上解决了这一系列问题。 其次,相较于传统熔焊工艺在焊缝附近形成重新铸造形态,搅拌摩擦焊由于主轴会给被焊接的工件部位施加一个很大的压力,所以在焊缝附近得到的是锻造形态,这种锻造形态组织比铸造形态组织致密得多,因而焊接后零件的机械性能也比传统熔焊工艺做出来的好得多。 而搅拌摩擦焊最大的优势体现在其本质是把机械能转化成焊接所需要的热能,所以可以用特定的公式相当准确的计算出焊接热及其引发的工件热变形的量,从而为事前的补偿和事后的纠正提供了几乎不依赖操作者经验的定量的依据,这是任何一种传统焊接工艺都望尘莫及的。
摘要 搅拌摩擦焊技术是90年代发展起来的、自发明到工业应用时间跨度最短和发展最快的一项新型固相连接新技术,公认为是最有前途和最适合航空材料以及结构件制造的工艺方法之一。由于搅拌摩擦焊焊缝组织均匀、接头力学性能优异,生产过程中安全、无飞溅、无烟尘烟气、无辐射,污染小、成本低等技术优势,因而在许多工业领域获得了广泛应用。在航天工业中,搅拌摩擦焊工艺在飞行器铝合金结构制造中的推广应用,在国外已显示出强劲的技术创新活力,给传统制造工艺带来了革命性的改造。 随着人们对搅拌摩擦焊技术认识的提高,预计在不远的将来,铝合金、镁合金、锌合金、钛合金等轻金属材料的连接将主要由搅拌摩擦焊来完成,尤其在运载火箭、高速铝合金列车、铝合金高速快艇、全铝合金汽车等项目中搅拌摩擦焊技术将会占主导地位。 本文设计出的搅拌摩擦焊焊机,总功率约3千瓦,适合于普通厚度的铝及其合金的工艺试验试件的焊接,搅拌摩擦头转速约6000r/min,焊接速度100—600mm/min,最大加工焊缝厚度20mm,焊缝长度600mm。文中介绍了搅拌摩擦焊焊接技术的基本原理和特点,概要地介绍了搅拌摩擦焊的技术优势、研究现状、工业应用和发展前景。针对工艺试验试件搅拌摩擦焊机,主要设计、计算和校核了设备各主要部分,均能够满足试验用焊机的要求。 该设备结构紧凑,简单,操作方便,与市场价格相比,成本很低。 关键词:搅拌摩擦焊;固相焊接;铝合金焊接;应用前景;焊机设计 Abstract Friction stir welding (FSW) was firstly used in the 1990s, which is
swiftest in development and is shortest in time from inventment to applyment, it is also treated as one of the technology of the most pertencial and the most suitable for aviation and struction manufaction. The joints welded by friction stir welding are homogeneous in microstructure and predominant in mechanical capacity. Because of the virtue, such as the security, no splash, no radiation and no pollution during friction stir welding, and so on, so this technique is widely utilized in industry. In aviation industry, aircrafts made by aluminium alloy are usually welded by friction stir welding. Abroad market is explored of FSW in other countries, and also making a reformation in the manufacture of watercraft. With the further acknowledgement to FSW, the joint of aluminium alloy, magnesium alloy, zinc alloy and titanium alloy will be welded by FSW. Especially, the carrier rocket, high velocity aluminium alloy train, high velocity alminium alloy speed boat and aluminium alloy vehicle will be possibly welded by the FSW. This task is to sign a machine used in laboratory. Its power is about three kilowatt, rotation rate approximately is 6000r/min, and welding speed is from 100 to 600mm/min. It can be apply to welding the aluminium and aluminium alloy. In addition, the welding thickness can’t exceed 20mm and length 600mm. In this paper, the basal principle and features of FSW is introduced, and the priority, prospect and application are also expounded. Importantly, main parts of the FSW machine was designed and calculated, the calculation results shows that the FSW machine designed in the paper can accord with the demand of the testing in laboratory. The device is simple and compact in structure. Comparing with the marketable price, its cost is very lower. Key words:Friction stir welding,Solid phase welding,Aluminium alloy welding,
第4.3节摩擦力 【教学设计思想】 在课堂上创设生活情景,引出生活难题,引导学生独立思考,尝试去解决问题,使学生对本节课产生极大的兴趣, 【教材分析】 教材出处:鲁科版《高中物理》必修一第四章第三节 摩擦力是力学中的三大性质力之一,是高中力学的一个重点,也是难点。正确认识摩擦力对整个力学知识框架的搭建起着至关重要的作用。在摩擦力这节课中,重点是研究滑动摩擦力,要求会计算其大小和判断其方向;难点是静摩擦力,尤其是静摩擦力方向的判断。教师要试图将学生初中学过的相关概念与本节的内容有机地融合在一起。教学中要力图从两种摩擦力的区别与联系出发,让学生从摩擦力产生的条件、影响摩擦力大小的因素、范围及其计算来理解两种摩擦力的异同,通过探究实验去加深巩固。 本节课也是一节科学探究课,教材从生活中的摩擦现象引入,以探究静摩擦力和滑动摩擦力与哪些因素有关为主线,安排了学生猜想、设计实验、实验探究、合作交流等教学过程,让学生经历探讨两种摩擦力与接触面粗糙程度、压力关系的过程。很好地体现了新教材让学生在体验知识的形成与发展过程中,主动获取知识的精神。同时,本节课的内容与学生的实际生活联系十分密切,教材的编写突出了这一点。在通过实验得出摩擦力的有关知识后,注重引导学生运用所学的知识去分析解释大量生活生产中的摩擦现象,并能运用这些知识解决实际生活中遇到的问题。 【学情分析】 学习者是高中一年级学生,目前还没有学习力的合成与分解相关知识,只是在初中阶段简单的了解了一下摩擦力的性质。所以在讲述新课的时候要充分考虑学生的接受能力,要让他们在已掌握知识的基础上逐渐学习新课程,避免跨越式教学。 一、教学目标 (一)知识与技能 1.认识静摩擦、滑动摩擦力,和它们的产生条件及其作用效果,会判断它们的方向。 2.根据物体的平衡条件简单地计算静摩擦力的大小。 3.能运用滑动摩擦力公式来计算滑动摩擦力 (二)过程与方法
摩擦力 【学习目标】 1.知道滑动摩擦产生的条件,会正确判断滑动摩擦力的方向 2.会用公式f=μN计算滑动摩擦力的大小,知道影响动摩擦因数的大小因素 3.知道静摩擦力的产生条件,能判断静摩擦力的有无以及大小和方向 4.理解最大静摩擦力.能根据二力平衡条件确定静摩擦力的大小 【要点梳理】 要点一、摩擦力 要点诠释: 1.定义:当相互接触且相互挤压的物体之间有相对运动或相对运动趋势时,接触面间产生的阻碍相对运动或相对运动趋势的力,称为摩擦力.固体、液体、气体的接触面上都会有摩擦作用. 2.分类:分为滚动摩擦(初中已经学习过)、滑动摩擦力和静摩擦力 要点二、滑动摩擦力 要点诠释: 1.产生:一个物体在另一个物体表面上相对于另一个物体发生相对滑动时,另一个物体阻碍它相对滑动的力称为滑动摩擦力. 2.产生条件:①相互接触且相互挤压;②有相对运动;③接触面粗糙. 说明: 1)两个物体直接接触、相互挤压有弹力产生. 摩擦力与弹力一样属接触作用力,但两个物体直接接触并不挤压就不会出现摩擦力.挤压的效果是有压力产生.压力就是一个物体对另一个物体表面的垂直作用力,也叫正压力,压力属弹力,可依上一节有关弹力的知识判断有无压力产生. 2)接触面粗糙.当一个物体沿另一物体表面滑动时,接触面粗糙,各凹凸不平的部分互相啮合,形成阻碍相对运动的力,即为摩擦力.凡题中写明“接触面光滑”、“光滑小球”等,统统不考虑摩擦力(“光滑”是一个理想化模型). 3)接触面上发生相对运动. 特别注意:“相对运动”与“物体运动”不是同一概念.“相对运动”是指受力物体相对于施力物体(以施力物体为参照物)的位置发生了改变;而“物体的运动”一般指物体相对地面的位置发生了改变.
摩擦焊应用的意义 ——09制造332 姚健在压力作用下,通过待焊工件的摩擦界面及其附近温度升高,材料的变形抗力降低、塑性提高、界面氧化膜破碎,伴随着材料产生塑性流变,通过界面的分子扩散和再结晶而实现焊接的固态焊接方法。 摩擦焊通常由如下四个步骤构成:1、机械能转化为热能;2、材料塑性变形;3、热塑性下的锻压力;4、分子间扩散再结晶。 摩擦焊技术经过长年的发展,已经发展出很多种摩擦焊接的分类:包括惯性摩擦焊、径向摩擦焊、线性摩擦焊、轨道摩擦焊、搅拌摩擦焊等。 摩擦焊相较传统熔焊最大的不同点在于整个焊接过程中,待焊金属获得能量升高达到的温度并没有达到其熔点,即金属是在热塑性状态下实现的类锻态固相连接。 相对于传统熔焊,摩擦焊具有诸多优点: 1、接头质量好且稳定。焊接过程由机器控制,参数设定后容易监控,重复性好,不依赖于操作人员的技术水平和工作态度。焊接过程不发生熔化,属固相热压焊,接头为锻造组织,因此焊缝不会出现气孔、偏析和夹杂、裂纹等铸造组织的结晶缺陷,焊接接头强度远大于熔焊、钎焊的强度,达到甚至超过母材的强度。 2、效率高。对焊件的要求通常不高,焊接设备容易自动化,可在流水线上生产,每件焊件时间以秒计,是其它焊接方法不能相比的。
3、节能、节材、低耗。所需功率仅及传统焊接工艺的1/5~1/15,不需焊条,焊剂、钎料、保护气体,不需要填加金属,也不需要消耗电极。 4、焊接性好。特别适合异种材料的焊接,与其他焊接方法相比,摩擦焊有得天独厚的优势,如钢和紫铜、钢和铝、钢和黄铜等等。 5、环保、无污染。焊接过程不产生烟尘或有害气体,不产生飞溅,没有弧光和火花,没有放射线。 由于以上这些优点,摩擦焊技术被誉为未来的绿色焊接术。经过了几十年的发展,摩擦焊技术在国内目前已经具备了包括工艺、设备、控制、检验等整套完备的技术规模。新颖的摩擦焊接技术不仅拓展了摩擦焊的应用范围.而且提高了焊接部件的整体性能和可靠性.使那些难焊或不能焊的材料也能获得高质量的焊缝.研究先进摩擦焊接技术具有重大的理论意义和工程应用价值.
特种焊接方法与工艺大作业——摩擦焊焊接技术 姓名:武颂昆 学号: 20 班级: 10焊接 天津滨海职业学院 2011年12月
摩擦焊焊接技术 一、摩擦焊的定义 摩擦焊(Friction Welding,FW)是利用焊件接触的端面相对运动中相互摩擦所产生的热,使端面达到热塑性状态,然后迅速顶锻,完成焊接的一种固相焊接方法。 二、摩擦焊的基本原理 摩擦焊焊接过程是在压力的作用下,相对运动的待焊材料之间产生摩擦,使界面及附近温度升高并达到热塑性状态,随着顶锻力的作用,界面氧化膜破碎,材料发生塑性变形与流动,通过界面元素扩散及再结晶冶金反应而形成接头。 焊接过程不加填充金属,不需焊剂,也不用保护气体,全部焊接过程只需几秒钟。 两焊件结合面之间在较高的压力下高速旋转相互摩擦产生了两个重要的效果:一是破坏了结合面的氧化膜或其他污物,使纯净金属暴露出来;另一个是摩擦生热,使结合面很快形成热塑性层。在随后的摩擦扭矩和轴向压力作用下这些破碎的氧化物和部分塑性层被挤出结合面外形成飞边,剩余的塑性变形金属就构成了焊缝金属,最后的顶锻使焊缝金属获得进一步锻造,形成了质量良好的焊接接头。 三、摩擦焊的特点 (1)焊接施工时间短,生产效率高。 (2)焊接热循环引起的焊接变形小,焊后尺寸精度高,不用焊后校形和消
除应力。 (3)机械化、自动化程度高,焊接质量稳定。当给定焊接条件后,操作简单,不需要特殊的焊接技术人员。 (4)适合各类异种材料的焊接,对常规熔化下不能焊接的铝-钢、铝-铜、钛-铜、金属间化合物-钢等都可以进行焊接。 (5)可以实现同直径、不同直径的棒材和管材的焊接。 (6)焊接时不产生烟雾、弧光以及有害气体等,不污染环境。同时,与闪光焊相比,电能节约5-10倍。 四、摩擦焊的应用 目前我国摩擦焊技术的应用比较广泛,可焊接直径3.0~120mm的工件以及8000mm2的大截面管件,同时还开发了相位焊和径向摩擦焊技术,以及搅拌摩擦焊技术。不仅可焊接钢、铝、铜,而且还成功焊接了高温强度级相差很大的异种钢和异种金属,以及形成低熔点共晶和脆性化合物的异种金属。如高速钢—碳钢、耐热钢—低合金钢、高温和金—合金钢、不锈钢—低碳钢、不锈钢—电磁铁以及铝—铜、铝—钢等。 近年来随着我国航空航天事业的发展,也加速了摩擦焊技术向这些领域的渗透,进行了航空发动机转子、起落架结构件、紧固件等材料(Ln718Ti17300MGH159GH4169)以及金属与陶瓷、复合材料、粉末高温合金的摩擦焊工艺试验研究,某些电工材料的钎焊工艺也开始用摩擦焊接所取代。如电磁铁—不锈钢、钨铜合金等。目前我国采用摩擦焊接方法焊接的产品有:锅炉行业的蛇形管摩擦焊接,阀门行业的阀门法兰和阀体密封座的摩擦焊接,轴瓦行业的止推边轴瓦的摩擦焊接,工具行业的钻头、铣刀、铰刀的刃部与柄部的摩擦焊接,汽车及机车行业发动机的双金属排气阀、气门顶杆、柴油机预热室喷咀、半轴、扭力管、内燃机增压器涡轮轴,潜水电泵转轴,紫铜不锈钢水接头,铝铜过渡接头,纺织机梭子芯,关节轴承,泥瓦工具,地质钻杆,石油钻杆、实心、空心抽油杆,航空发动机集成齿轮,木工多用机床上的刀轴等等。 我国现有六百余台摩擦焊机,绝大部分是连续驱动摩擦焊机。近年来由于加强了与德国KUKA、日东株氏会社、美国MTI公司等摩擦焊机制造公司的交流与引进样机,焊机先后采用了液压马达驱动的主轴系统,串联轴承组——平衡油缸
第16讲摩擦力大小的计算 【方法指导】 一、滑动摩擦力 1.在求解摩擦力的大小时,一定要分清是求静摩擦力,还是求滑动摩擦力,只有滑动摩擦力才能直接应用公式F=μF N求解。 2.公式F=μF N中的F N是物体接触面之间的压力,不一定有F N=mg,要根据物体受力情况来确定。 3.滑动摩擦力F的大小与物体的运动速度、接触面积的大小无关。 4.计算滑动摩擦力的大小时,关键是根据力的平衡知识求出正压力的大小。 二、静摩擦力 静摩擦力的大小在0~F fmax之间,其具体数值由物体受的其他外力和运动状态决定,与接触面间的正压力无关,但最大静摩擦力的大小与正压力成正比。 【对点题组】 1.如图所示,在动摩擦因数μ=0.1的水平面上向右运动的物体,质量为20 kg,在运动过程中,还受到一个水平向左的大小为10 N的拉力作用,则物体受到的滑动摩擦力为(g取10 m/s2) () A.10 N,向右B.10 N,向左 C.20 N,向右D.20 N,向左 2.如下图所示,两块木板紧紧夹住木块,一直保持静止,木块重为30 N,木块与木板间的动摩擦因数为0.2.若左右两端的压力F都是100 N,则每块木板对木块的摩擦力大小和方向是() A.30 N,方向向上 B.20 N,方向向上 C.40 N,方向向下 D.15 N,方向向上3.一根质量为m,长度为L的均匀长方木条放在水平桌面上,木条与桌面间的动摩擦因数为μ.现用水平力F推木条,当木条经下图所示位置时,桌面对它的摩擦力为() A.μmg B. 2 3 mg μ C. 1 3 mg μD.上述选项均不对 4.如下图所示,物体放在水平桌面上,在水平方向上共受三个力作用,即F1、F2和摩擦力作用,物块处于静止状态,其中F1=10 N,F2=2 N,若撤去F1,物体仍静止不动,则物块受到的摩擦力是() A.8 N,方向向右B.8 N,方向向左 C.2 N,方向向右D.2 N,方向向左 5. A、B、C三物块的质量分别为M、m和m0,按如下图所示连接。绳子不可伸长,且绳子和滑轮的质量、滑轮的摩擦均可不计。若B随A一起沿水平桌面做匀速运动,则可以断定() A.物块A与桌面之间有摩擦力,大小为m0g B.物块A与B之间有摩擦力,大小为m0g C.桌面对A、B对A都有摩擦力,两者方向相同,合力为m0g D.桌面对A、B对A都有摩擦力,两者方向相反,合力为m0g 6.一物块m在水平力拉动下,沿静止的水平传送带由A端运动到B端,如图甲所示,这时所受摩擦力为F1;现开动机械让传送带向左匀速传动,再次将同样的物块m由传送带的左端匀速拉动到右端,这时所受摩擦力大小为F2,如图乙所示。则F1、F2的大小关系满足()
摩擦焊 ?摩擦焊原理与分类 ?惯性摩擦焊 ?搅拌摩擦焊 ?摩擦焊设备 定义:摩擦焊是利用焊件相对摩擦运动产生的热量来实现材料可靠连接的一种压力焊方法。其焊接过程是在压力的作用下,相对运动的待焊材料之间产生摩擦,使界面及其附近温度升高并达到热塑性状态,随着顶锻力的作用界面氧化膜破碎,材料发生塑性变形与流动,通过界面元素扩散及再结晶冶金反应而形成接头 一、摩擦焊原理及分类 ?1.1 摩擦焊的分类 ?摩擦焊的方法很多,一般根据焊件的相对运动和工艺特点进行分类,主要方法如图1所示。在实 际生产中,连续驱动摩擦焊、相位控制摩擦焊、惯性摩擦焊和搅拌摩擦焊应用的比较普遍。 ?通常所说的摩擦焊主要是指连续驱动摩擦焊、相位控制摩擦焊、惯性摩擦焊和轨道摩擦焊,统称 为传统摩擦焊,它们的共同特点是靠两个待焊件之间的相对摩擦运动产生热能。而搅拌摩擦焊、嵌入摩擦焊、第三体摩擦焊和摩擦堆焊,是靠搅拌头与待焊件之间的相对摩擦运动产生热量而实现焊接。 1.2 摩擦焊原理 ?同种材质焊接时,最初界面接触点上产生犁削-粘合现象。由于单位压力很大,粘合区增多。继续 摩擦使这些粘合点产生剪切撕裂,金属从一个表面迁移到另一个表面。界面上的犁削-粘合-撕裂过程进行时,摩擦力矩增加时界面温度增高。当整个界面上形成一个连续塑性状态薄层后,摩擦力矩降低到一最小值。界面金属成为塑性状态并在压力作用下不断被挤出形成飞边,工件轴向长度也不断缩短 ?异种金属的机理比较复杂,除了犁削-粘合-剪切撕裂无力现象外,金属的物理与力学性能、相互 间固溶度及金属间化和物等,在结合机理中都会起作用,焊接时由于机械混合和扩散作用,在结合面附近很窄的区域内有可能发生一定程度的合金化,这一薄层的性能会对整个接头的性能有重要影响。机械混合和相互镶嵌对结合也会有一定作用。这种复杂性使得异种金属的摩擦焊接性很难预料。 1.2.1.连续驱动摩擦焊1.2.2 惯性摩擦焊1.2.3 相位摩擦焊1.2.4 径向摩擦焊1.2.5 摩擦堆焊1.2.6 线性摩擦焊1.2.7 搅拌摩擦焊 二、连续驱动摩擦焊 ?2.1 连续驱动摩擦焊基本原理 ? 2.1.1 焊接过程 ?连续驱动摩擦焊接时,通常将待焊工件两端分别固定在旋转夹具和移动夹具内,工件被夹紧后, 位于滑台上的移动夹具随滑台一起向旋转端移动,移动至一定距离后,旋转端工件开始旋转,工件接触后开始摩擦加热。此后,则可进行不同的控制,如时间控制或摩擦缩短量(又称摩擦变形量)控制。当达到设定值时,旋转停止,顶锻开始,通常施加较大的顶锻力并维持一段时间,然后,旋转夹具松开,滑台后退,当滑台退到原位置时,移动夹具松开,取出工件,至此,焊接过
目前最先进的焊接工艺,搅拌摩擦 焊,你知道原理吗 搅拌摩擦焊是由英国焊接技术研究所于1991年发明的新型焊接技术,其原理如下图所示。 一根安装在主轴上的形状为蜗杆形式的搅拌针在一定压力下被插入焊缝位置,搅拌针的长度一般要比焊缝深度略浅,以此来保证主轴的轴肩能紧贴被焊接的工件表面。当工件与搅拌针和轴肩摩擦生热,焊缝附近的材
料会因受热产生严重的塑性变形,但是,并不是熔化,只是成为一种“半流体”的状态,随着主轴带动搅拌针沿着焊缝的走向进给,搅拌针不断把已经处于“半流体”状态的材料搅拌到身后,当主轴离开后,这些材料将冷却固化,从而形成一条稳定的焊缝。 大家都知道,以铝合金和镁合金为代表的轻质合金是航空航天器的主要结构材料之一。然而这些轻质合金的可焊性都非常差,传统的各种熔焊工艺都无法从根本上杜绝热裂纹、气孔和夹渣等这些焊接缺陷的产生,需要靠操作者具有非常高超的技术和工艺才能保证焊接质量。并且,熔焊的高温会产生大量热量和有毒的烟气,这对操作者的身体健康也造成了很大的威胁。而搅拌摩擦焊的出现从根本上解决了这一系列问题。 其次,相较于传统熔焊工艺在焊缝附近形成重新铸造形态,搅拌摩擦焊由于主轴会给被焊接的工件部位施加一个很大的压力,所以在焊缝附近得到的是锻造形态,这种锻造形态组织比铸造形态组织致密得多,因而焊接后零件的机械性能也比传统熔焊工艺做出来的好得多。 而搅拌摩擦焊最大的优势体现在其本质是把机械能转化成焊接所需要的热能,所以可以用特定的公式相当准确的计算出焊接热及其引发的工件热变形的量,从而为事前的补偿和事后的纠正提供了几乎不依赖操作者经验的定量的依据,这是任何一种传统焊接工艺都望尘莫及的。
3 l 白城一中物理组 / 闫炜平 摩擦力做功计算是同学做题时容易疑惑的问题, 概括的说分为三种情况,下面举例说明: 一、在摩擦力大小、方向都不变的情况下,应该 用θ cos ? ? =s f W f 可求。 二、在摩擦力大小不变,方向改变时,由微元法, 可将变力功等效成恒力功求和。 例1:质量为m的物体,放在粗糙水平面上。现 使物体沿任意曲线缓慢地运动,路程为s,物体与水 平面间的动摩擦因数为μ。则拉力F做的功为多少? 解:由微元法可知:F做的功应等于摩擦力做功总和。 例2 :如图所示,竖直固定放置的斜面AB的下 端与光滑的圆弧轨道BCD的B端相切,圆弧面半径 为R,圆心O与A、D在同一水平面上,∠COB=θ。 现有一个质量为m的小物体从斜面上的A点无初速 滑下,已知小物体与AB斜 面间的动摩擦因数为μ。求 (1)小物体在斜面体上能 够通过的路程;(2)小物体 通过C点时,对C点的最 大压力和最小压力。 [解析](1)小物体在运动过程中,只有重力及摩 擦力做功,小物体最后取达B点时速度为零。设小物 体在斜面上通过的总路程为s,由动能定理得: ① 又 由①②式得: (2)小物体第一次到达C点时速度大,对C点压力 最大。 由动能定理④ 小物体最后在BCD圆弧轨道上运动,小物体通过C 点时对轨道压力最小。得: ⑥ 解⑥⑦式得 最小值 [注意,摩擦力做功的公式s f W? - =中,s一般是 物体运动的路程] 三、摩擦力大小、方向都在时刻改变时,速度V 越大时,压力 N F也越大,则由 N F fμ =可知 N F越 大,f也越大,摩擦力做功越多。 例1:连接A、B两点的弧形轨道ACB与ADB 是用相同材料制成的,它们的曲率半径相同。如图所 示,一个小物体由A点以一 定初速度v开始沿ACB滑 到B点时,到达B点速率 为 1 v若小物体由A点以相 同初速度沿ADB滑到B点时,速率为 2 v与的关系: () A 1v>2v B 1v=2v C 1v<2v D 无法判断 [解析]A 物体沿ACB运动过程中受竖直向下的 重力。垂直于轨道向上的支持力,沿切线方向的摩擦 力,其中重力、支持力不做功,摩擦力做负功,又据 圆运动的知识,支持力的平均值小于重力,摩擦力的 平均值较小。物体沿ADB运动过程中受竖直向下的 重力、垂直于轨道向上的支持,沿切线方向的摩擦力, 重力、支持力不做功,摩擦力做负功,而此过程中支 持力的平均值大于重力,摩擦力较大,而过程运动弧 长相同。所以沿ACB过程摩擦力做负功较小,到达B 点时速率较大,故选 A正确。 例2:如图所示,地面上有一个半圆形轨道,一 小物体(可视为质点)从一端离地面高为h的A点自 由落下,恰好顺着圆弧运动,从另一端D点竖直向上 射出,其最高点B距地面的高度为h/2,接着物体从 B点又自由落下,返回到左边的 最高点() A 低于C点 B 高于C点 C 恰在C点 D 无法确定 [解析]B 物体沿ACDB运动过程中应用动能定 理可知:2/ mgh W f = 即:由功能关系可知:由C到D过程中机械能损 失为2 mgh, 同理可知:当物体由BD到C过程中损失机械能 小于2 mgh故球一定能够高于C点。 例3:如图所示,在竖直平面内固定着1/4圆弧 槽,圆弧槽的半径为R,它的末 端水平,上端离地高H,一个小 球从上端A点无初速滑下,若 小球的水平射程为S,求圆弧槽 阻力做功。 解:设小球脱离滑槽,开始做平抛运动的速度为 05年高考试题(选) 25.(20分)如图所示,一对杂技演员(都视为 质点)乘秋千(秋千绳处 于水平位置)从A点由静 止出发绕O点下摆,当摆 到最低点B时,女演员在 极短时间内将男演员沿水 平方向推出,然后自己刚 好能回到高处A。求男演员落地点C与O点的水平距 离s。已知男演员质量m1和女演员质量m2之比 ,2 2 1 = m m秋千的质量不计,秋千的摆长为R,C 点低5R。 (白城一中物理组/ 李松选 答案请见2版右下角) 大家一起来学习 如图所示,滑块A质量m=0.01kg,与水平地面 间的动摩擦因数μ=0.2。用细线悬挂的小球质量均为 m’=0.01kg且沿x轴均匀排列。A与第一只小球及小 球与相邻小球距离均为s=2m,且从左至右悬挂小球 的线长分别为……当A与第一只小球间距 为2m时的运动速度且正好沿着x轴正 向运动。不计滑块和小球大小且当滑块与球、球与球 发生碰撞时机械能守恒,交换速度,碰后任一小球恰 好能在坚直平面内做完整的圆周运动。() (1)最左侧悬挂小球的线长为多少? (2)滑块在运动中能与几个小球发生碰撞。 (3)求出碰撞中第n 的表达式。 [解析](1)设滑块与第一个 球碰撞前的速度为 1 v,由动 能定理得:2 1 umgs= - 一个球碰后瞬间球速 1 v v= 械能守恒得:2 2 1 2 1 2 1 2 2 1mv mgl mv+ =又因为 球在最高点时,由牛顿第二定律有, 所以悬挂在最左侧绳长 (2)对滑块由动能定理得2 2 1 0mv umgs- = - 所以滑块滑行的总路程m s25 =则滑块在滑行过 程中与小球碰撞个数5. 12 = =s s n,应取12个 (3)设滑块与第n个(n≦12)球碰前速度为 n v由 动能定理得2 22 1 2 1mv mv ns umg n - = ? -则滑 块与球碰后,球速 n n v v= '若第n个悬线长 n l到最高 点速度为n n v 对小球机械能守恒2 2'2 1 2 2 1n n n n mv mgl mv+ = 且在最高点由牛顿第二定律有 n n l mv mg2' =联立 以上各式g ugns v l n 5 ) 2 (2 - = [教师评语]这是一道力学习题,可用来培养同学们的 复合解题能力、考查的知识点有: ①动能定理 ②机械能守恒 ③瞬间牛顿第二定律 ④弹性碰撞时(不损失能量) 由动量守恒,能量守恒可知,质量相等发生速度互换 现象。 (白城一中一年五班/ 史小汐投搞) ② 2 2 1 cos c mv AB mg mgR= ? -θ μ 第1版共2版主管白城一中教研所主办白城一中高一物理组排版:张学金李延铎我们的目标:从生活走向物理,从物理走向社会!印刷:校本部印刷室 B C A cos= -fs mgRθ θ μcos mg f= μ R S= R mv mg N c 2 max = -③ s mg s s s s mg W n f ? = + + + =μ μ) ( 3 2 1 R mv mg N c /2' min = - ⑦ (1 mgR- ()mg ctg Nθ θ μ? - =cos 2 3 max B v ()R H g S v B - =2 2 2 1 B f mv W mgR= - ()R H mgS mgR W f - - =4 2 由平抛运动知识得:① 由动能定理得: ()mg Nθ cos 2 3 min - = 由①②得: ② m g ugs v l84 .1 5 ) 2 (2 1 = - = 1 2 2 l mv mg= ( 16 .0 2m n - =12 3.2.1 = n 2 / 10s m g= s m v/ 10 = 3 l 2 l 1 l 1 l