第四节汽车起重机液压系统
一、概述
汽车起重机是一种使用广泛的工程机械,这种机械能以较快速度行走,机动性好、适应性强、自备动力不需要配备电源、能在野外作业、操作简便灵活,因此在交通运输、城建、消防、大型物料场、基建、急救等领域得到了广泛的使用。在汽车起重机上采用液压起重技术,具有承载能力大,可在有冲击、振动和环境较差的条件下工作。由于系统执行元件需要完成的动作较为简单,位置精度要求较低,所以,系统以手动操纵为主,对于起重机械液压系统,设计中确保工作可靠与安全最为重要。
汽车起重机是用相配套的载重汽车为基本部分,在其上添加相应的起重功能部件,组成完整汽车起重机,并且利用汽车自备的动力作为起重机的液压系统动力;起重机工作时,汽车的轮胎不受力,依靠四条液压支撑腿将整个汽车抬起来,并将起重机的各个部分展开,进行起重作业;当需要转移起重作业现场时,需要将起重机的各个部分收回到汽车上,使汽车恢复到车辆运输功能状态,进行转移。一般的汽车起重机在功能上有以下要求
1)整机能方便的随汽车转移,满足其野外作业机动、灵活、不需要配备电源的要求;
2)当进行起重作业时支腿机构能将整车抬起,使汽车所有轮胎离地,免受起重载荷的直接作用,且液压支腿的支撑状态能长时间保持位置不变,防止起吊重物时出现软腿现象;
3)在一定范围内能任意调整、平衡锁定起重臂长度和俯角,以满足不同起重作业要求;
4)使起重臂在3600以内能任意转动与锁定;
5)使起吊重物在一定速度范围内任意升降,并能在任意位置上能够负重停止,负重启动时不出现溜车现象。
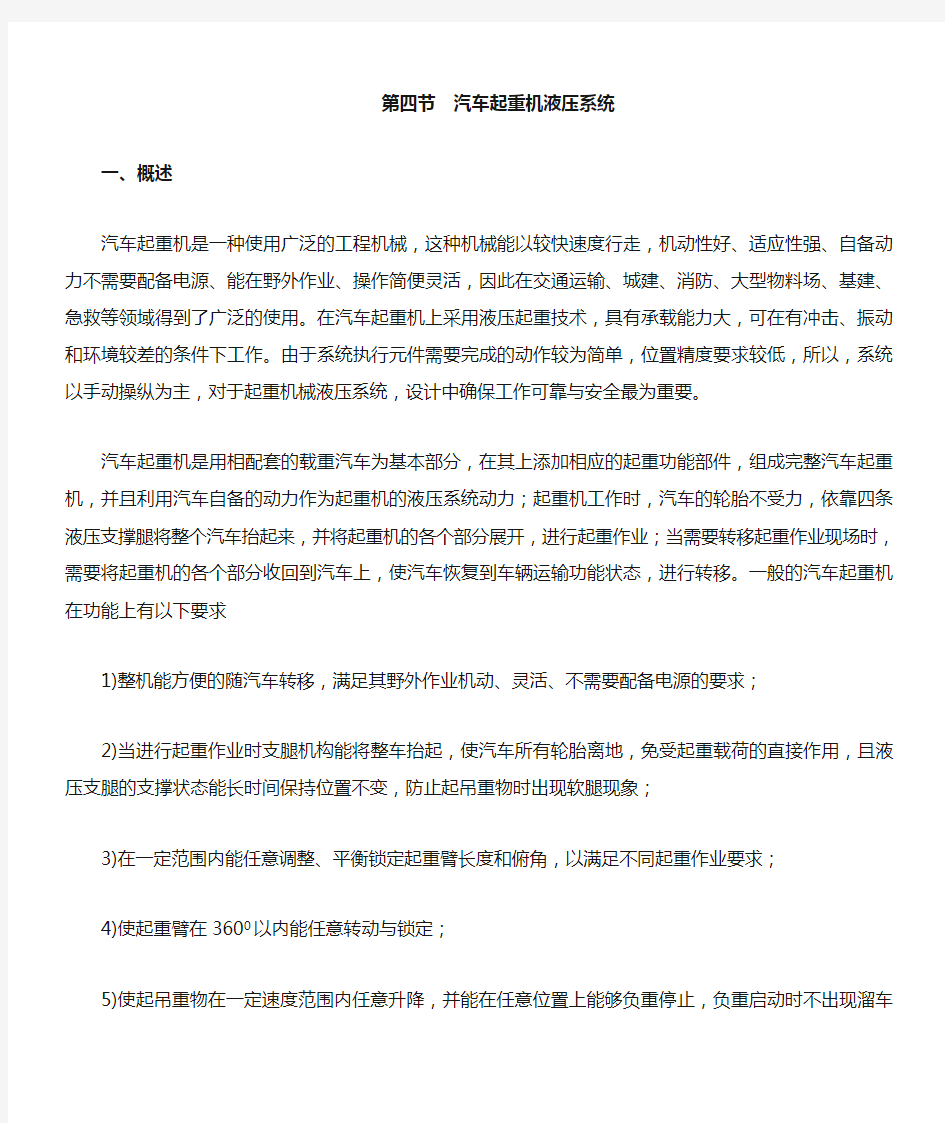
图8-9所示为汽车起重机的结构原理图,它主要由如下五个部分构成
1)支腿装置起重作业时使汽车轮胎离开地面,架起整车,不使载荷压在轮胎上,并可调节整车的水平度,一般为四腿结构。
2)吊臂回转机构使吊臂实现3600任意回转,在任何位置能够锁定停止。
3)吊臂伸缩机构使吊臂在一定尺寸范围内可调,并能够定位,用以改变吊臂的工作长度。一般为3节或4节套筒伸缩结构。
4)吊臂变幅机构使吊臂在150-800之间角度任意可调,用以改变吊臂的倾角。
5)吊钩起降机构使重物在起吊范围内任意升降,并在任意位置负重停止,起吊和下降速度在一定范围内无级可调。
二、工作原理
Q2-8型汽车起重机是一种中小型起重机(最大起重能力8吨),该起重机液压系统如图8-10、产品照片组所示。这种起重机的作业操作,主要通过手动操纵来实现多缸各自动作。起重作业时一般为单个动作,少数情况下有两个缸的复合动作,为简化结构,系统采用一个液压泵给各执行元件串联供油方式。在轻载情况下,各串联的执行元件可任意组合,使几个执行元件同时动作,如伸缩和回转,或伸缩和变幅同时进行等。
汽车起重机液压系统中液压泵的动力,都是由汽车发动机通过装在底盘变速箱上的取力箱提供。液压泵为高压定量齿轮泵,由于发动机的转速可以通过油门人为调节控制,因此尽管是定排量泵,但其输出的流量可以在一定的范围内通过控制汽车油门开度的大小来人为控制,从而实现无级调速;该泵的额定压力为21MPa,排量为40min/r,额定转速为1500r/min;液压泵通过中心回转接头9、开关10和过滤器11从油箱吸油;输出的压力油经回转接头9、多路换向阀手动阀组l和2的操作,将压力油串联地输送到各执行元件,当起重机不工作时,液压系统处于卸荷状态。液压系统各部分工作的具体情况如下
1)支腿缸收放回路该汽车起重机的底盘前后各有两条支腿,通过机械机构可以使每一条支腿收起和放下。在每一条支腿上都装着一个液压缸,支腿的动作由液压缸驱动。两条前支腿和两条后支腿分别由多路换向阀1中的三位四通手动换向阀A和B控制其伸出或缩回。换向阀均采用M型中位机能,且油路采用串联方式。确保每条支腿伸出去的可靠性至关重要,因此每个液压缸均设有双向锁紧回路,以保证支腿被可靠地锁住,防止在起重作业时发生“软腿”现象或行车过程中支腿自行滑落。此时系统中油液的流动情况为
前支腿
进油路取力箱→液压泵→多路换向阀1中的阀A→两个前支腿缸进油腔;
回油路两个前支腿缸回油腔→多路换向阀1中的阀A→阀B中位→旋转接头9→多路换向阀2中阀C、D、E、F的中位→旋转接头9→油箱。
后支腿
进油路取力箱→液压泵→多路换向阀1中的阀A的中位→阀B→两个后支腿缸进油腔;
回油路两个后支腿缸回油腔→多路换向阀1中的阀A的中位→阀B→旋转接头9→多路换向阀2中阀C、D、E、F的中位→旋转接头9→油箱。
2)吊臂回转回路吊臂回转机构采用液压马达作为执行元件。液压马达通过蜗轮蜗杆减速箱和一对内啮合的齿轮传动来驱动转盘回转。由于转盘转速较低,每分钟仅为1-3转,故液压马达的转速也不高,因此没有必要设置液压马达制动回路。系统中用多路换向阀2中的一个三位四通手动换向阀C来控制转盘正、反转和锁定不动三种工况。此时系统中油液的流动情况为
进油路取力箱→液压泵→多路换向阀1中的阀A、阀B中位→旋转接头9→多路换向阀2中的阀C→回转液压马达进油腔;
回油路回转液压马达回油腔→多路换向阀2中的阀C→多路换向阀2中的阀D、E、F的中位→旋转接头9→油箱。
3)伸缩回路起重机的吊臂由基本臂和伸缩臂组成,伸缩臂套在基本臂之中,用一个由三位四通手动换向阀D控制的伸缩液压缸来驱动吊臂的伸出和缩回。为防止因自重而使吊臂下落,油路中设有平衡回路。此时系统中油液的流动情况为
进油路取力箱→液压泵→多路换向阀1中的阀A、阀B中位→旋转接头9→多路换向阀2中的阀C中位→换向阀D→伸缩缸进油腔;
回油路伸缩缸回油腔→多路换向阀2中的阀D→多路换向阀2中的阀E、F的中位→旋转接头9→油箱。
4)变幅回路吊臂变幅是用一个液压缸来改变起重臂的俯角角度。变幅液压缸由三位四通手动换向阀E控制。同样,为防止在变幅作业时因自重而使吊臂下落,在油路中设有平衡回路。此时系统中油液的流动情况为进油路取力箱→液压泵→阀A中位→阀B中位→旋转接头9→阀C中位→阀D中位→阀E→变幅缸进油腔;
回油路变幅缸回油腔→阀E→阀F中位→旋转接头9→油箱。
5)起降回路起降机构是汽车起动机的主要工作机构,它由一个低速大转矩定量液压马达来带动卷扬机工作。液压马达的正、反转由三位四通手动换向阀F控制。起重机起升速度的调节是通过改变汽车发动机的转速从而改变液压泵的输出流量和液压马达的输入流量来实现的。在液压马达的回油路上设有平衡回路,以防止重物自由落下;在液压马达上还设有单向节流阀的平衡回路,设有单作用闸缸组成的制动回路,当系统不工作时通过闸缸中的弹簧力实现对卷扬机的制动,防止起吊重物下滑;当吊车负重起吊时,利用制动器延时张开的特性,可以避免卷扬机起吊时发生溜车下滑现象。此时系统中油液的流动情况为
进油路取力箱→液压泵→阀A中位→阀B中位→旋转接头9→阀C中位→阀D中位→阀E中位→阀F→卷扬机马达进油腔;
回油路卷扬机马达回油腔→阀F→旋转接头9→油箱。
三、性能分析
从图8-10可以看出,该液压系统由调压、调速、换向、锁紧、平衡、制动、多缸卸荷等基本回路组成,其性能特点是:
1)在调压回路中,采用安全阀来限制系统最高工作压力,防止系统过载,对起重机实现超重起吊安全保护作用。
2)在调速回路中,采用手动调节换向阀的开度大小来调整工件机构(起降机构除外)的速度,方便灵活,充分体现以人为本,用人来直接操纵设备的思想。
3)在锁紧回路中,采用由液控单向阀构成的双向液压锁将前后支腿锁定在一定位置上,工作可靠,安全,确保整个起吊过程中,每条支腿都不会出现软腿的现象,即使出现发动机死火或液压管道破裂的情况,双向液压锁仍能正常工作,且有效时间长。
4)在平衡回路中,采用经过改进的单向液控顺序阀作平衡阀,以防止在起升、吊臂伸缩和变幅作业过程中因重物自重而下降,且工作稳定、可靠,但在一个方向有背压,会对系统造成一定的功率损耗。
5)在多缸卸荷回路中,采用多路换向阀结构,其中的每一个三位四通手动换向阀的中位机能都为M型中位机能,并且将阀在油路中串联起来使用,这样可以使任何一个工作机构单独动作;这种串连结构也可在轻载下使机构任意组合地同时动作;但采用6个换向阀串连连接,会使液压泵的卸荷压力加大,系统效率降低,但由于起重机不是频繁作业机械,这些损失对系统的影响不大。
6)在制动回路中,采用由单向节流阀和单作用闸缸构成的制动器,利用调整好的弹簧力进行制动,制动可靠、动作快,由于要用液压缸压缩弹簧来松开刹车,因此刹车松开的动作慢,可防止负重起重时的溜车现象发生,能够确保起吊安全,并且在汽车发动机死火或液压系统出现故障时,能够迅速实现制动,防止被起吊的重物下落。
起重机液压系统使用注意事项示范文本 In The Actual Work Production Management, In Order To Ensure The Smooth Progress Of The Process, And Consider The Relationship Between Each Link, The Specific Requirements Of Each Link To Achieve Risk Control And Planning 某某管理中心 XX年XX月
起重机液压系统使用注意事项示范文本使用指引:此管理制度资料应用在实际工作生产管理中为了保障过程顺利推进,同时考虑各个环节之间的关系,每个环节实现的具体要求而进行的风险控制与规划,并将危害降低到最小,文档经过下载可进行自定义修改,请根据实际需求进行调整与使用。 起重机是以液压为动力的,设有各种液压装置。因 此,如不确实遵守运转维护规则,不仅不可能充分发挥应 有的性能,还将缩短机件的使用寿命。因此,在进行作业 时,必须切实遵守以下的事项。 1.作业前,应由油箱液位窗口确定液压油是否按规定加 足,低于规定刻线以下,则必须加以补充。加油时,一定 要经过加油滤网注入,并十分注意不能混进不同牌号的油 或水等不纯特质。 2.滤油器滤芯在工作250h后,应进行检查,必要时进 行清洗或更换。 3.液压油箱应每隔半个月从底部放油口清除水分和杂质 一次,并每隔一年(或工作满2000h)更换全部液压油(在油
液未发生变质的情况下,可适当延长换油周期)。当起重机在使用环境特别恶劣的情况下作业时,油液的更换周期应相应缩短。 4.液压系统的各种阀门在出厂前已经充分试验,并已调整好压力和流量,切不可随便触动。 5.各种机件,特别是液压系统各装置,都切忌污垢附着。在作业以后,一定要把灰尘、油污清除干净。 请在此位置输入品牌名/标语/slogan Please Enter The Brand Name / Slogan / Slogan In This Position, Such As Foonsion
设计及说明结果一、25吨汽车起重机伸缩臂架的设计 箱型吊臂连接尺寸的确定包含下列的容:1)吊臂根部铰点位置 的确定;2)吊臂各节尺寸的确定;3)变幅油缸铰点的确定。 1、吊臂根部铰点位置的确定 基本臂工作长度和吊臂最大工作长度的确定: 由图2.1可知,设为工作长度,则有 图2.1 三铰点有关尺寸图
式中:H—基本臂的起升高度,。 b—吊钩滑轮组最短距离,取。 、—根部铰点和头部滑轮轴心离吊臂基本截面中心线的距离,并带有符号。由于此项数值较小,所 以计算时可以忽略不计。 —吊臂仰角,取。 h—根部铰接点离地距离,取。 吊臂根部离铰点的距离e —最小工作幅度,取。 吊臂根部铰点离回转平面的高度 —回转支承装置的高度, —起重机汽车底盘的高度, 主吊臂最大长度 —最长主臂起升高度, a,r,b,h同上。 2、吊臂各节尺寸的确定 主吊臂的最长长度是由基本臂结构长度和外伸长度所组成。 、、—各节臂的伸缩长度,在设计中伸缩长度往往取
同一数值,即。外伸长度。 、、—为二、三、四节臂缩回后外漏部分的长度,在 计算时取同一数值(a=0.25m) 若假设为臂头滑轮中心离基本臂端面的距离,则基本臂结构长度加上即为基本臂的工作长度。 所以有 从中可以求出 k—吊臂的节数。 —主臂最大长度,初取35m。 —主臂最小长度,初取11m。 通常搭接长度应该短些,以减轻吊臂重量。但是,太短将搭接部分反力增大了,引起搭接部分吊臂的盖板或侧板局部失稳,同时,也使吊臂的间隙变形增大。因此搭接部分要根据实际经验和优化设计而定,一般为伸缩臂外伸长度的1/4—1/5(吊臂较长者取后者,较短者取前者,同步伸缩者可取后者)。 从而搭接长度为 在第i节臂退回后,除外露部分长度a外,在前节(i-1)节臂中的长度加上伸出后仍在前节臂中的那部分搭接长度。第i节臂插在前节臂的长度为(),设第i节臂的结构长度为,则
(汽车行业)汽车起重机液压 系统毕业设计
目录 前言 (1) 1 绪论 (2) 1.1 汽车起重机概述 (2) 1.2 国外汽车起重机发展概况及发展趋势 (2) 1.2.1 国外汽车起重机发展概况 (2) 1.2.2 国外汽车起重机发展趋势 (4) 1.3 国内汽车起重机的发展概况和发展趋势 (5) 1.3.1 国内汽车起重机的发展概况 (5) 1.3.2 国内汽车起重机发展趋势 (6) 1.4 汽车起重机上液压系统的特点 (7) 1.5 汽车起重机液压系统的运用现状和发展趋势 (8) 1.6 课题意义和主要研究任务 (9) 2 QY25K汽车起重机工况分析 (10) 2.1 QY25K汽车起重机简介 (10) 2.2 QY25K汽车起重机液压系统组成及特点 (11) 2.2.1下车液压系统 (11) 2.2.2上车液压系统 (11) 2.3 QY25K汽车起重机的各组合、分配及控制 (12) 2.4 QY25K 汽车起重机的整机技术参数 (13) 2.5 QY25K汽车起重机的工作等级 (15) 2.6 典型工况分析及对系统要求 (16)
2.6.1伸缩机构的作业情况 (16) 2.6.2 副臂的作业情况 (16) 2.6.3 三个以上机构的组合作业情况 (16) 2.6.4 典型工况的确定 (16) 2.6.5 系统要求 (17) 2.7 QY25K汽车起重机主机的工况分析 (18) 2.7.1 运动分析 (18) 2.7.2 动力分析 (19) 2.7.3 液压马达的负载 (20) 3 QY25K汽车起重机液压系统设计 (22) 3.1 QY25K汽车起重机液压系统额定压力的确定 (22) 3.2 QY25K汽车起重机液压系统的基本回路设计 (22) 3.2.1 起升机构回路的设计 (22) 3.2.2 变幅、伸缩机构回路的设计 (23) 3.2.3 回转机构回路的设计 (24) 3.2.4 支腿机构回路的设计 (25) 3.3 液压系统的控制分析 (27) 3.3.1 负荷传感 (27) 3.3.2 恒功率控制 (28) 3.3 QY25K汽车起重机液压系统原理图 (29) 4 QY25K汽车起重机液压系统参数的计算 (30) 4.1 变幅机构 (30)
湖南交通职业技术学院 毕业设计<论文)审核 设计<论文)题目:汽车起重机结构组成和液压系统常见故障分析作者: 专业: 班级: 成绩: 校内指导教师: 校外指导教师: 2018年02月20日 摘要
随着社会的急速发展,便利的起重设备在越来越多的领域发挥着作用,随着技术的提升和载重的增加,更多的工程施工已不再局限于固定式的起重设备,汽车起重机就是在这样一个前景下迅速的发展起来,汽车起重机的结构组成和常见的一些故障及其保养方法,越来越受到人们的关注,本文主要介绍了汽车起重机的结构组成,并针对液压系统常见的故障及其维护措施做了详细的概述。 关键词:汽车起重机结构,工作原理,常见液压故障诊断,解决方法
目录 第一章绪论 (5) 第二章汽车起重机结构组成 (6) 2.1 汽车起重机发展概述 (6) 2.2 起重机种类及特点 (6) 2.3 汽车起重机基本结构、作用 (8) 第三章三一汽车起重机液压系统 (13) 3.1 三一汽车起重机液压系统特点 (13) 3.2 三一起重机液压系统构成作用 (13) 3.2 起重机液压系统保护设置 (14) 第四章液压系统常见故障 (15)
4.1 液压系统常见故障分析 (15) 4.2 液压系统检查方法 (16) 4.2.1 整机的检查方法 (16) 4.2.2 液压油检查 (17) 4.2.3 根据发动机噪声的变化, 判断故障的类型 (17) 4.2.4元件故障的检查方法 (18) 4.2.5 执行元件的故障检查 (18) 第五章起重机的调试 (19) 5.1 起重机调试的目的及过程 (19) 5.2 路试流程及分阶段检测工程及要求 (19) 第六章结束语 (20)
液控履带起重机电气控制原理 1.液控系统的概念 履带起重机的主要运行机构如起升、回转、变幅、行走等机构,如果这些机构中的泵、阀、马达的运行方式不是主要由电信号驱动的,而是由先导比例液压驱动主阀或者由手动直接驱动主阀阀芯而改变液压回路的系统,则称此类履带起重机的液压系统为先导液压控制系统或者简称为液控系统。 手动直接驱动主阀阀芯的部分原理图如图1所示,为一个小吨位汽车吊的原理图。主阀的放大图如图2所示。这类一般用于小吨位起重机产品,如20吨以下汽车起重机等。 图1 小吨位汽车吊原理图 图2 手动阀原理图
先导比例液压控制的典型原理图如图3所示。一般用于小吨位汽车吊和履带吊,如50-100吨左右。它的主要特点之一就是主机构的油路的改变采用先导油压进行控制,因此,手柄的驱动力可以很小。 图3 先导比例液压控制原理图 电控系统指的是在对液压系统的控制过程中,泵、阀或马达等机构采用的是电信号控制。泵可以是电比例变量泵,电信号的大小直接控制泵排量的大小;阀可以是开关阀也可以是比例阀,马达也一样。图4是一种电控开关主阀的原理图,图5是一种电比例控制的马达原理图。 图5电控开关主阀的原理图
图6 电比例控制的马达原理图 2.液控系统的控制框图 由于相关的电气控制点比较少,控制逻辑也比较简单,因此,电气控制的主要方面有力限器的控制和相关信息的显示说明等。 对液控的履带起重机进行分析,可以将电气系统分成如下几部分: 1)人机界面:包括各类的显示灯、组合仪表、视频系统等; 2)安全限制装置:包括力限器系统、限位开关、传感器等; 3)工作操作装置:包括手柄、脚踏板、遥控器等; 4)执行装置:包括各类开关、继电器、灯具等电器元件。 整车控制系统的框图如图7所示。 力限器系统是整车安全运行的核心,实时计算整车的力矩限制参数,并显示实际载荷和额定载荷,给出超载或超角度的限制信号给电气系统,电气系统再切段相应的危险回路。如果是超载,则切段向下变幅和起升动作。如果是超角度,则切段向上变幅动作。 各类安全限位及传感器的信号输入到组合仪表,进行显示和报警,包括液压系统的参数如压力、发动机系统的参数如转速、机油压力等,还包括卷扬的三圈保护限位、吊钩高度限位等。这些限位信号经过继电器的电流开关控制作用,对
附件2 许昌学院本科毕业论文(设计)开题报告 学生姓名张彬彬学号0613090120 所在学院电信学院专业机械设计制造及其自动化 指导教师董永强职称副教授 论文题目起重机液压传动系统 填表说明: 选题的依据及意义: 汽车式起重机是把起重机安装安置在载重汽车底盘上的一种工程机械。最近几年来由于汽车载重功能和性能的水平不断提高,各种各样的特定的汽车底盘的应运而生,导致大吨位的汽车式起机不断的被生产出来。特别在近几年,中国汽车起重机有了迅速的发展。汽车起重机是以汽车底盘为基础的自行式设备,具有较高的行驶速度,可以与装运工具的汽车编队行驶,机动性能好;广泛用于建筑、货站及野外吊装作业等,可在冲击、振动、温度变化大的环境较差的条件下工作。因此,液压传动在现代机械工程领域得到广泛的应用。 毕业设计的基本思路 本课题主要针对汽车起重机的功能、组成和工作特点进行以下研究工作: 1)分析已有的汽车起重机,对液压元件进行选择。 2)对个工作机构液压回路进行设计,对各个回路的组成原理进行分析。 3)根据本液压系统工作参数和各个机构主要参数对液压系统进行设计计算。 4)对整个液压系统的验算及维护和检修。 参考文献 [1] 陈道南等编.《起重运输机械》. 冶金工业出版社, 1988年 [2] 陈道南、盛汉中.《起重机课程设计》.北京:冶金工业出版社,1983年 [3] 《通用机械》. 化学工业出版社,2004年 [4] 《机械设计手册》.机械工业出版社,2004年 [5] 《运输机械设计选用手册》.北京:化学工业出版社,1999年 [6] 起重机设计手册编写组编.《起重机设计手册》.机械工业出版社,1979年
液压系统设计项目 汽车起重机液压系统设计 项目目标:1能够理解单向阀的类型、结构工作原理。 2、理解单向阀的用途 3、能进行锁紧回路的油路分析 4、应用液压仿真软件模拟运行动作 实训步骤:1、采用仿真软件机床液压系统原理图 2、手动控制模拟吊车液压系统工作状态 3、分析动作液压回路的工作情况,如;压力、流量等。 项目要求: 在吊装机液压系统中,要求执行元件在停止运动时不受外界影响而发生漂移或窜动,也就是要求液压缸或活塞杆能可靠地停留在行程的任意位置上。应选用何种液压元件来实现这一功能呢?在实际应用中常用单向阀或液控单向阀来实现这个动作要求 项目分析: 通过学习,我们知道液压传动系统中执行机构(液压缸或活塞杆)的运动是依靠换向阀来控制的,而换向阀的阀芯和阀体间总是存在着间隙,这就造成了换向阀内部的泄漏。若要求执行机构在停止运动时不受外界的影响,仅依靠换向阀是不能保证的,这时就要利用单向阀来控制液压油的流动,从而可靠地使控制执行元件能停在某处而不受外界影响。 该任务中,吊装机液压系统对执行机构的来回运动过程中停止位置要求较高,其本质就是对执行机构进行锁紧,使之不动,这种起锁紧作用的回路称为锁紧回路。图所示便是采用液控单向阀的锁紧回路。换向阀左位工作时,压力油经左液控单向阀进入液压缸左腔,同时将右液控单向阀打开,使液压缸右腔油液能流回油箱,液压缸活塞向右运动;反之,当换向阀右位工作时,压力油进入液压缸右腔并将左液控单向阀立即关闭,活塞停止运动。为了保证中位锁紧可靠换向阀宜采用H型或Y型。由于液控单向阀的密封性能很好,从而能使执行元件长期
锁紧。这种锁紧回路主要用于汽车起重机的支腿油路和矿山机械中液压支架的油路。 液压系统图 图1为汽车液压吊车支腿液压系统原理图 图2为汽车液压吊车起重液压系统原理图
履带式起重机构造、原理 摘要:履带起重机是广泛应用于国民经济各领域的一种起重设备,国内在大吨位产品的自主开发方面还是个空白,目前仅有两个厂家引进国外70年代末的技术有少量的生产,大部分市场还是由国外产品占领。履带起重机接地面积大,通过性好,适应性强,可带载行走,可进行挖土、夯土、打桩等多种作业。机动灵活,不象固定式起重机那样需要安装和调试。但因行走速度缓慢,转移工地需要其他车辆搬运。本文概述述了起重机的分类,简要说明了履带起重机的各个部分及其工作原理,详细介绍了履带起重机的回转,卷扬(提升),行走液压系统工作原理。 关键词:履带吊回转卷扬行走液压系统 The Principle Of Hydraulic System Of Crawler Crane Abstract:In china there’s a blank in the development of the large crawler crane, which is a important device widely used in different fields. At present, only two companies which introduce foreign technology of the end of 1970 product some crawler cranes and the most part of the market is in the hands of other countries. The crawler crane take a large area with ground, has a strong adaptability, can be widely used,and can go with a lifting , in addition,it can ekcacate,tamp,pile and so on. It’s more flexible, not need to be installed and adjusted. But it goes slowly, no wander it needs a car to help with it to go. This paper simply show you the categories of crane, the principle of different parts of the crawler crane. And it is detailed in the hydraulic systems of gyration, lifting, going. Key words: crawler crane 、gyration、 lifting、 going、 hydraulic system
摘要 QY40型汽车起重机液压系统的设计是该型起重机设计过程中最关键的一步。本文根据液压系统的技术指标对该系统进行整体方案设计,对其功能和工作原理进行分析,初步确定了系统各回路的基本结构及主要元件,按照所给机构性能参数和液压性能参数进行元件的选择计算,通过对系统性能的验算和发热校核,以满足该起重机所要达到的要求。 本文还针对当前汽车起重机所采用的一项先进技术——电液比例控制技术,从原理、控制部件、回路控制、控制措施以及对汽车起重机的影响等进行专题研究。由此对电液比例控制技术在汽车起重机中的运用给以充分的肯定,对汽车起重机的发展前景有了很大的希望。 关键字: 汽车起重机液压系统高效节能性能参数电液比例
Abstract Model QY40 automobile crane hydraulic pressure systematic design this type hoist the most key one of the design process.This text analyses , demand to carry on the scheme to work out on this performance systematic in hydraulic pressure. Prove to its function and operation principle Have confirmed the basic structure of system every return circuit and main component tentatively According to giving the organization performance parameters and choice of carrying on the component of performance parameter of hydraulic pressure to calculate Through to the checking computations and generating heat to check of systematic function, in order to respond to the request that this hoist should reach This text, still to an advanced technology that the automobile crane adopts at present —Control technology of proportion of the electric liquid .Carry on the case study from principle , controlling part , return circuit controlling , control measure and impact on automobile crane ,etc. Therefore give the abundant affirmation to the application of the proportion of the electric liquid in the automobile crane of control technology The development prospect has very great hopes. key words:Crane truck Hydraulic pressure system Energy-efficient Performance parameter Proportion of the electric liquid
100t履带起重机回转液压系统设计及改进探究 摘要:履带起重机是现代建设生产中的重要设备,随着我国建筑行业不断发展,社会对履带起重机需求不断增加。回转液压系统是履带起重机核心系统,其性能直接影响起重机整体功率输出。本文以100t履带起重机为例,对其回转液压系统设计与改进方法进行简单分析。 关键词:履带起重机;回转液压系统 中图分类号:TH213.7 文献标识码:A 文章编号:1674-7712 (2014)24-0000-01 履带式起重机在港口、石化工业等均有广泛应用,是现阶段一种常见的社会生产设备。回转液体系统是起重机核心,影响起重机整体工作性能。在回转液压系统设计过程中,在考虑系统选型静态特点的同时,还要考虑系统动态性能,判断其是否满足实际生产的需要,在保证系统功能的同时,也要体现系统设计、改进的经济性。 一、回转液压系统设计 (一)液压驱动回转功能概简述 液压驱动回转功能在履带式起重机整体功能输出中占 据着突出位置。常规生产设备的回转机构运行在整个工作周期中占据重要比例,例如,液压挖掘机回转动作约占工作周期的63.2%。履带式起重机的回转时间较少,在整个工作周
期中所占的比例不明显,但由于履带式起重机整体功率输出高,导致回转过程具有运动冲击力强、回转惯量大等特点[1]。根据履带式起重机实际功率总输出合理设计回转液压系统,在提高起重机工作能力、减少能源消耗、提高工作效率中发挥着重要意义。 (二)履带起重机回转液压机构 1.基本原理。现阶段液压履带起重机均为回转液压马达驱动式,驱动装置通过高转液压马达实现与大传动减速机的配合,为小齿轮添加驱动力,实现机台运行。该驱动方式具有“微小操作”式优点,在减少能源消耗的同时快速根据回转进行工作范围定位。100t履带起重机因上车机体体积大,通常选用外啮合方式[2]。 2.系统设计。本次讨论中,回转液压系统采用双泵Asvol07泵控液压系统。双主泵属于斜轴式变量泵,带有两组轴向锥形旋转组件,其最大排量107mL/r,并带有驱动齿轮泵与轴向泵。 该系统通过将不同的恒定功率液压泵连接起来,为整个系统进行功率供给,在常规生产条件下,单个泵额定输出功率约是发动机总功率的38.7%。当两个液压泵的实际输出功率在而定范围内,其功率输出才能被吸收。 在本次研究中,双液压泵各具有相互独立的变量调节装置,通过联系两个调节装置,实现液压泵联动。从运行过程
第四节汽车起重机液压系统 一、概述 汽车起重机是一种使用广泛的工程机械,这种机械能以较快速度行走,机动性好、适应性强、自备动力不需要配备电源、能在野外作业、操作简便灵活,因此在交通运输、城建、消防、大型物料场、基建、急救等领域得到了广泛的使用。在汽车起重机上采用液压起重技术,具有承载能力大,可在有冲击、振动和环境较差的条件下工作。由于系统执行元件需要完成的动作较为简单,位置精度要求较低,所以,系统以手动操纵为主,对于起重机械液压系统,设计中确保工作可靠与安全最为重要。 汽车起重机是用相配套的载重汽车为基本部分,在其上添加相应的起重功能部件,组成完整汽车起重机,并且利用汽车自备的动力作为起重机的液压系统动力;起重机工作时,汽车的轮胎不受力,依靠四条液压支撑腿将整个汽车抬起来,并将起重机的各个部分展开,进行起重作业;当需要转移起重作业现场时,需要将起重机的各个部分收回到汽车上,使汽车恢复到车辆运输功能状态,进行转移。一般的汽车起重机在功能上有以下要求 1)整机能方便的随汽车转移,满足其野外作业机动、灵活、不需要配备电源的要求; 2)当进行起重作业时支腿机构能将整车抬起,使汽车所有轮胎离地,免受起重载荷的直接作用,且液压支腿的支撑状态能长时间保持位置不变,防止起吊重物时出现软腿现象; 3)在一定范围内能任意调整、平衡锁定起重臂长度和俯角,以满足不同起重作业要求; 4)使起重臂在3600以内能任意转动与锁定; 5)使起吊重物在一定速度范围内任意升降,并能在任意位置上能够负重停止,负重启动时不出现溜车现象。 图8-9所示为汽车起重机的结构原理图,它主要由如下五个部分构成 1)支腿装置起重作业时使汽车轮胎离开地面,架起整车,不使载荷压在轮胎上,并可调节整车的水平度,一般为四腿结构。 2)吊臂回转机构使吊臂实现3600任意回转,在任何位置能够锁定停止。 3)吊臂伸缩机构使吊臂在一定尺寸范围内可调,并能够定位,用以改变吊臂的工作长度。一般为3节或4节套筒伸缩结构。 4)吊臂变幅机构使吊臂在150-800之间角度任意可调,用以改变吊臂的倾角。 5)吊钩起降机构使重物在起吊范围内任意升降,并在任意位置负重停止,起吊和下降速度在一定范围内无级可调。 二、工作原理 Q2-8型汽车起重机是一种中小型起重机(最大起重能力8吨),该起重机液压系统如图8-10、产品照片组所示。这种起重机的作业操作,主要通过手动操纵来实现多缸各自动作。起重作业时一般为单个动作,少数情况下有两个缸的复合动作,为简化结构,系统采用一个液压泵给各执行元件串联供油方式。在轻载情况下,各串联的执行元件可任意组合,使几个执行元件同时动作,如伸缩和回转,或伸缩和变幅同时进行等。 汽车起重机液压系统中液压泵的动力,都是由汽车发动机通过装在底盘变速箱上的取力箱提供。液压泵为高压定量齿轮泵,由于发动机的转速可以通过油门人为调节控制,因此尽管是定排量泵,但其输出的流量可以在一定的范围内通过控制汽车油门开度的大小来人为控制,从而实现无级调速;该泵的额定压力为21MPa,排量为40min/r,额定转速为1500r/min;液压泵通过中心回转接头9、开关10和过滤器11从油箱吸油;输出的压力油经回转接头9、多路换向阀手动阀组l和2的操作,将压力油串联地输送到各执行元件,当起重机不工作时,液压系统处于卸荷状态。液压系统各部分工作的具体情况如下 1)支腿缸收放回路该汽车起重机的底盘前后各有两条支腿,通过机械机构可以使每一条支腿收起和放下。在每一条支腿上都装着一个液压缸,支腿的动作由液压缸驱动。两条前支腿和两条后支腿分别由多路换向阀1中的三位四通手动换向阀A和B控制其伸出或缩回。换向阀均采用M型中位机能,且油路采用串联方式。确保每条支腿伸出去的可靠性至关重要,因此每个液压缸均设有双向锁紧回路,以保证支腿被可靠地锁住,防止在起重作业时发生“软腿”现象或行车过程中支腿自行滑落。此时系统中油液的流动情况为 前支腿 进油路取力箱→液压泵→多路换向阀1中的阀A→两个前支腿缸进油腔; 回油路两个前支腿缸回油腔→多路换向阀1中的阀A→阀B中位→旋转接头9→多路换向阀2中阀C、D、E、F的中位→旋转接头9→油箱。 后支腿 进油路取力箱→液压泵→多路换向阀1中的阀A的中位→阀B→两个后支腿缸进油腔; 回油路两个后支腿缸回油腔→多路换向阀1中的阀A的中位→阀B→旋转接头9→多路换向阀2中阀C、D、E、F的中位→旋转接头9→油箱。
液压起重机的液压系统设计-(1)
机电一体化专业毕业设计(论文) 论文标题:液压起重机的液压系统设计 作者姓名: 指导教师: 完成时间: 实习单位:
目录 摘 要 (3) 一、概 述……………………………………………………… (3) (一)关于起重机 (3) (二)液压起重机传动的优缺点 (4) (三)液压传动的工作原理及组成 (4) (四)起重机液压系统的应用现状和发展趋势 (5) 二、起重机液压系统的特点分析 (6) (一)起升机构液压回路 (6) (二)伸缩臂机构液压回路 (7) (三)变幅机构液压回路 (8) 三、液压传动系统的故障分析及排除 (8) (一)液压系统的主要故障 (8) (二)故障检查 (9) (三)液压系统的故障预防 (9) (四)液压系统的故障分析 (10) (五)液压系统的故障排除 (10) 四、起重机重量的确定及机构件参数性能的确定 (12)
五、参考文献 (19) 六、结论 (20) 液压起重机的液压系统设计 内容摘要:本文对液压起重机的设计进行了研究,分章、节逐一论述了设计过程。在设计过程部分,首先对装载起重机的汽车的底盘进行选择,确定起重机的技术参数,重点就车载起重机的液压系统进行论述和设计,以及对起重机的主要机构如起升机构、回转机构的型式和计算方法做出论述,对回转机构机械装配部分也进行了设计,最后对影响起重机起重能力的支腿型式及其跨距的确定进行了简要说明。 关键词:液压起重机,液压系统,回转机构液压缸 一、概述 (一)关于起重机 汽车起重机是装在普通汽车底盘或特制汽车底盘上的一种起重机,其行驶驾驶室与起重操纵室分开设置。这种起重机的优点是机动性好,转移迅速。缺点是工作时须支腿,不能负荷行驶,也不适合在松软或泥泞的场地上工作。 汽车起重机的底盘性能等同于同样整车总重的载重汽车,符合公路车辆的技术要求,
油路及性能分析 姓名:张汉新班级:动力909 1)支腿缸收放回路该汽车起重机的底盘前后各有两条支腿,通过机械机构可以使每一条支腿收起和放下。在每一条支腿上都装着一个液压缸,支腿的动作由液压缸驱动。两条前支腿和两条后支腿分别由多路换向阀1中的三位四通手动换向阀A和B控制其伸出或缩回。换向阀均采用M型中位机能,且油路采用串联方式。确保每条支腿伸出去的可靠性至关重要,因此每个液压缸均设有双向锁紧回路,以保证支腿被可靠地锁住,防止在起重作业时发生“软腿”现象或行车过程中支腿自行滑落。此时系统中油液的流动情况为 前支腿 进油路取力箱→液压泵→多路换向阀1中的阀A→两个前支腿缸进油腔; 回油路两个前支腿缸回油腔→多路换向阀1中的阀A→阀B中位→旋转接头9→多路换向阀2中阀C、D、E、F的中位→旋转接头9→油箱。 后支腿 进油路取力箱→液压泵→多路换向阀1中的阀A的中位→阀B→两个后支腿缸进油腔; 回油路两个后支腿缸回油腔→多路换向阀1中的阀A的中位→阀B→旋转接头9→多路换向阀2中阀C、D、E、F的中位→旋转接头9→油箱。 2)吊臂回转回路吊臂回转机构采用液压马达作为执行元件。液压马达通过蜗轮蜗杆减速箱和一对内啮合的齿轮传动来驱动转盘回转。由于转盘转速较低,每分钟仅为1-3转,故液压马达的转速也不高,因此没有必要设置液压马达制动回路。系统中用多路换向阀2中的一个三位四通手动换向阀C来控制转盘正、反转和锁定不动三种工况。此时系统中油液的流动情况为 进油路取力箱→液压泵→多路换向阀1中的阀A、阀B中位→旋转接头9→多路换向阀2中的阀C→回转液压马达进油腔; 回油路回转液压马达回油腔→多路换向阀2中的阀C→多路换向阀2中的阀D、E、F的中位→旋转接头9→油箱。 3)伸缩回路起重机的吊臂由基本臂和伸缩臂组成,伸缩臂套在基本臂之中,用一个由三位四通手动换向阀D控制的伸缩液压缸来驱动吊臂的伸出和缩回。为防止因自重而使吊臂下落,油路中设有平衡回路。此时系统中油液的流动情况为 进油路取力箱→液压泵→多路换向阀1中的阀A、阀B中位→旋转接头9→多路换向阀2中的阀C中位→换向阀D→伸缩缸进油腔; 回油路伸缩缸回油腔→多路换向阀2中的阀D→多路换向阀2中的阀E、F 的中位→旋转接头9→油箱。
起重机液压原理图及简 要分析 Company number:【0089WT-8898YT-W8CCB-BUUT-202108】
1—液压泵;2—滤油器;3—中央回转接头;4、9、13、18—多路阀组;5、8、15—平衡阀;6—吊臂液压缸;7—变幅液压缸;10—安全阀;11--油箱;12—回转液压马达;14—顺序阀;16—制动器液压缸;17—起升液压马达; 液压回路工作原理 根据液压静力压桩机起重机的作业要求,液压系统应完成下述工作:吊臂的变幅、伸缩,吊钩重物的升降,回转平台的回转。多路阀中的四联换向阀组成串联油路,变幅、伸缩、回转和起升各工作机构可任意组合同时动作,从而可提高工作效率。1.吊臂变幅、伸缩 吊臂变幅、伸缩是由变幅和伸缩工作回路实现。当这些机构均不工作即当所有换向阀都在中位时,泵输出的油液经多路阀后又流回油箱,使液压泵卸荷。 (1)操纵换向阀9处于左位,这时油液流动路线是:进油路:泵l—滤油器2一中心回转接头3—换向阀4中位—换向阀9左位—平衡阀8—变幅液压缸7大腔。 回油路:变幅液压缸7小腔—换向阀9左位—换向阀13、18中位—中心回转接头3—油箱。 此时,变幅液压缸活塞伸出,使吊臂的倾角增大。 当换向阀9处于右位时活塞缩回,吊臂的倾角减小。实际中按照作业要求使倾角增大或减小,实现吊臂变幅。
(2)操纵换向阀4处于左位,液压泵1的来油进入吊臂伸缩液压缸6的大腔,使吊臂伸出;换向阀4处于右位,则使吊臂缩回。从而实现吊臂的伸缩。 吊臂变幅和伸缩机构都受到重力载荷的作用。为防止吊臂在重力载荷作用下自由下降,在吊臂变幅和伸缩回路中分别设置了平衡阀5、8,以保持吊臂倾角平稳减小和吊臂平稳缩回。同时平衡阀又能起到锁紧作用,单向锁紧液压缸,将吊臂可靠地支承住。 2.吊重的升降 吊重的升降由起升工作回路实现。 当起升吊重时,操纵换向阀18处于左位。泵来油经换向阀18左位、平衡阀15进入起升马达17,同时液压油经过单向节流阀14进入制动液压缸小腔,制动松开,起升马达得以回转。而回油经换向阀18左位和中心回转接头3流回油箱。于是起升马达带动卷筒回转使吊重上升。 当下降吊重时,操纵换向阀18处于右位。泵1的来油使起升马达反向转动,回油经平衡阀15和换向阀18右位和中心回转接头3流回油箱。这时制动器液压缸16仍通入压力油,制动器松开,于是吊重下降。由于平衡阀15的作用,吊重下落时不会出现失速状况。 3.吊重回转 吊重的回转由回转工作回路实现。
附录A 译文 随车液压起重机的控制 摘要:本文主要是描述随车液压起重机的控制过程。这篇论文分为五个部分:需求分析,液压系统以及存在的问题的分析,不同结构产生不同问题的分析,基于更加先进复杂电液比例控制阀的新技术的发展趋势的分析。本文的研究工作是和实际的工业相结合的,比纯粹的研究理论更有意义。 关键字:随车液压起重机,控制策略,电液比例控制阀 1.引言 本文主要叙述的是对随车起重机控制系统的改进方法 随车汽车起重机可以看成是一种大型柔性控制机械结构。这种控制系统把操作人员的命令由机械结构变为执行动作。 这样定义这种控制系统是为了避免在设计它事产生模糊的思想这是一种通过人的命令把能量转化成机械动作的控制系统。本文所写的就是这种控制系统。以这个目标为指导方针来分析怎样设计出新的控制系统。 文章分为五个部分: 1.分析这种控制系统必须据有易操作性,高强度,高效性,稳定性,安全性。 2.分析目前这种操作系统所存在的问题。 3.从不同的方面分析这种控制系统:不同的操作方式,不同的控制方法,不 同的组织结构。 4.介绍一种适合于未来工业的比较经济的新的控制系统。 5.分析一种据有高性能,高效率,易控制等的比较好的控制系统。它将成为 今后研究的比较经济高效的一种方案。 2. 论文部分 2.1 对控制系统必备条件的分析 在一种新的操作系统开始正式投入工作之前,对这种控制系统据有严格的要求。对控制系统的影响有很多因素。例如:机械结构的可实行性因素,可操作性因素,效率因素,符合工业标准。 工业需求必须放在第一位。这与在控制系统中导管破裂保护和超载保护有同等的地位。
其次稳定性要求也很重要;系统不稳定就没法正常工作。一旦稳定性要求得以确定,控制系统性能要求就可以进一步确定。机械结构决定了起重机的可操作性。机械机构是随车起重机中可以往复转动固有频率低的大型柔性结构。 为了防止起重机振动,必须使起重机在固有频率下工作,或者提高起重机的固有频率。如果它的固有频率太低或者太高,操作人员将无法给它进行操作。最后传动效率可以在工业标准,稳定性,执行机构确定的基础上得到最优的方案。 2.2 对目前这种控制系统的分析 在设计一种新的起重机之前,研究目前起重机存在的问题是很有必要的。当前液压随车起重机主要存在以下三个问题: 1.不稳定性 2.不经济性 3.低效性 2.2.1 不稳定性 不稳定性是一个严重问题,他可能会损伤操作人员或者会是设备受到毁坏。当一个系统不稳定时通常产生严重振动。为了消除当前系统的不稳定性,设计人员既花费了很多时间来研究又花费了很多财力设计出更加复杂的机构。如图1所示为一种起重机,它适合于在高速下工作。但是为了可以安全的工作必须合理控制其运行速度。要提高它的控制速度又必须增加更加昂贵复杂的机械系统。 液压系统的参数,如温度或压力同样影响系统的稳定性。一个参数合理的液压系统比一个设计参数不合理的液压系统稳定,为了使整个系统运行稳定,有时必须降低次要的参数值。 2.2.2 不经济性 目前的液压系统是纯液压的机械系统,因此如果用户想实现一个功能,他就必须买一个能使现这个功能的液压机械组件。因为大多数用户又不同的使用要求,要求同一个设备可以进行升级。这就意味着这些标准设备可以人为的改造,这就增加了组件升级费用。 2.2.3 低效性 液体在液压系统的两个液压缸之间流动时效率较低。这是因为大多数液压阀都是用一个阀心来控制两个节流口,由于这个链接不可能使阀芯两侧的压力相
一:汽车起重机的工况分析 根据起重机试验规范,以及很多操作者的实际经验,可确定表的三种工况,作为轻型汽车起重机的典型工况。设计液压系统时要求各系统的动作能够满足这些工况要求。 二:汽车起重机对液压系统的要求 根据汽车起重机的典型工作状况对系统的要求主要反映在对以下几个液压回路的要求上。 1. 起升回路 (1)能方便的实现合分流方式转换,保证工作的高效安全。 (2)要求卷扬机构微动性好,起、制动平稳,重物停在空中任意位置能可靠制动,即二次下滑问题,以及二次下降时的重物或空钩下滑问题,即二次下降问题。 2. 回转回路 (1)具有独立工作能力。 (2)回转制动应兼有常闭制动和常开制动(可以自由滑转对中),两种情况。 3. 变幅回路 (1)带平衡阀并设有二次液控单向阀锁住保护装置。 (2)要求起落臂平稳,微动性好,变幅在任意允许幅值位置能可靠锁死。 (3)要求在有载荷情况下能微动。 (4)平衡阀应备有下腔压力传感器接口,作为力矩限制器检测星号源。
4. 伸缩回路 本机伸缩机构采用三节臂(含有两个液压缸),由于本机为轻型起重机为了使本机运用广泛,实现各节臂顺序伸缩。各节臂能按顺序伸缩,但不能实现同步伸缩。 5. 控制回路 (1)为了使操纵方便总体要求操纵手柄限制为两个。 (2)操纵元件必须具有45°方向操纵两个机构联动能力。 6. 支腿回路 (1)要求垂直支腿不泄漏,具有很强的自锁能力(不软腿)。 (2)要求前后组支腿可以进行单独调整。 (3)要求支腿能够承载最大起重时的压力,并且有足够的防倾翻力矩。 (4)起重机行走时不产生掉腿现象。 三:汽车起重机液压系统的工作原理总成 1支腿收放回路 由于汽车轮胎支撑能力有限,且为弹性变形体,作业时很不安全,故在起重作业前必须放下前、后支腿,用支腿承重使汽车轮胎架空。在行驶时又必须将支腿收起,轮胎着地。为此,在汽车的前、后两端各设置两条支腿,每条支腿均配置有液压缸。如图前支腿两个液压缸同时用一个三位四通手动换向阀7控制其收、放动作,而后支腿两个液压缸则用另一个三位四通手动换向阀11控制其收、放动作。为确保支腿能停放在任意位置并能可靠地锁住,在支腿液压缸的控制回路中设置了双向液压锁。 当三位四通手动换向阀7工作在右位时,前支腿放下,其油路为: 进油路:过滤器2→液压泵3→手动换向阀5左位→手动换向阀7右位→前支腿液压缸上腔。 回油路:前支腿液压缸下腔→液控单向阀→手动换向阀7右位→支腿回路安全阀→油箱。 当三位四通手动换向阀7工作在左位时,前支腿收回,其油路为: 进油路:过滤器2→液压泵3→手动换向阀5左位→手动换向阀7左位→前支腿液压缸下腔。 回油路:前支腿液压缸上腔→液控单向阀→手动换向阀7左位→支腿回路安全阀→油箱。
汽车起重液压系统设计 1 绪论 1.1 汽车起重机简介 汽车起重机是一种将起重作业部分安装在汽车通用或专用底盘上、具有载重汽车行驶性能的轮式起重机。根据吊臂结构可分为定长臂、接长臂和伸缩臂三种,前两种多采用桁架结构臂,后一种采用箱形结构臂。根据动力传动,又可分为机械传动、液压传动和电力传动三种。因其机动灵活性好,能够迅速转移场地,广泛用于土木工程。 汽车起重机的主要技术性能有最大起重量、整机质量、吊臂全伸长度、吊臂全缩长度、最大起升高度、最小工作半径、起升速度、最大行驶速度等。 1.2 液压系统在汽车起重机上应用及其特点 1.2.1 液压系统在汽车起重机上的应用 现在普遍使用的汽车起重机多为液压伸缩臂汽车起重机,液压伸缩臂一般有2~4节,最下(最外)一节为基本臂,吊臂内装有液压伸缩机构控制其伸缩。 液压系统要实现其工作目的必须经过动力源→控制机构→机构三个环节。其中动力源主要是液压泵,传输控制装置主要是一些输油管和各种阀的连接机构,执行机构主要是液压马达和液压缸。这三种机构的不同组合就形成了不同功能的液压回路。汽车起重机的液压系统由起升机构,回转机构,变幅机构,伸缩机构和支腿部分等组成,全为液压传动。 泵—马达回路是起重机液压系统的主要回路,按照泵循环方式的不同有开式回路和闭式回路两种。 开式回路中马达的回油直接通回油箱,工作油在油箱中冷却及沉淀过滤后再由液压泵送入系统循环,这样可以防止元件的磨损。但油箱的体积大,空气和油液的接触机会多,容易渗入。 闭式回路中马达的回油直接与泵的吸油口相连,结构紧凑,但系统结构复杂,散热条件差,需设辅助泵补充泄漏和冷却。而且要求过滤精度高,但油箱体积小,空气渗入油中的机会少,工作平稳。
附录A译文 随车液压起重机的控制 摘要:本文主要是描述随车液压起重机的控制过程。这篇论文分为五个部分:需求分析,液压系统以及存在的问题的分析,不同结构产生不同问题的分析,基于更加先进复杂电液比例控制阀的新技术的发展趋势的分析。本文的研究工作是和实际的工业相结合的,比纯粹的研究理论更有意义。 关键字:随车液压起重机,控制策略,电液比例控制阀 1.引言 本文主要叙述的是对随车起重机控制系统的改进方法 随车汽车起重机可以看成是一种大型柔性控制机械结构。这种控制系统把操作人员的命令由机械结构变为执行动作。 这样定义这种控制系统是为了避免在设计它事产生模糊的思想这是一种通过人的命令把能量转化成机械动作的控制系统。本文所写的就是这种控制系统。以这个目标为指导方针来分析怎样设计出新的控制系统。 文章分为五个部分: 1.分析这种控制系统必须据有易操作性,高强度,高效性,稳定性,安全性。 2.分析目前这种操作系统所存在的问题。 3.从不同的方面分析这种控制系统:不同的操作方式,不同的控制方法,不 同的组织结构。 4.介绍一种适合于未来工业的比较经济的新的控制系统。 5.分析一种据有高性能,高效率,易控制等的比较好的控制系统。它将成为 今后研究的比较经济高效的一种方案。 2.论文部分 2.1对控制系统必备条件的分析 在一种新的操作系统开始正式投入工作之前,对这种控制系统据有严格的要求。对控制系统的影响有很多因素。例如:机械结构的可实行性因素,可操作性因素,效率因素,符合工业标准。 工业需求必须放在第一位。这与在控制系统中导管破裂保护和超载保护有同等的地位。
其次稳定性要求也很重要;系统不稳定就没法正常工作。一旦稳定性要求得以确定,控制系统性能要求就可以进一步确定。机械结构决定了起重机的可操作性。机械机构是随车起重机中可以往复转动固有频率低的大型柔性结构。 为了防止起重机振动,必须使起重机在固有频率下工作,或者提高起重机的固有频率。如果它的固有频率太低或者太高,操作人员将无法给它进行操作。最后传动效率可以在工业标准,稳定性,执行机构确定的基础上得到最优的方案。 2.2对目前这种控制系统的分析 在设计一种新的起重机之前,研究目前起重机存在的问题是很有必要的。当前液压随车起重机主要存在以下三个问题: 1.不稳定性 2.不经济性 3.低效性 2.2.1不稳定性 不稳定性是一个严重问题,他可能会损伤操作人员或者会是设备受到毁坏。当一个系统不稳定时通常产生严重振动。为了消除当前系统的不稳定性,设计人员既花费了很多时间来研究又花费了很多财力设计出更加复杂的机构。如图1所示为一种起重机,它适合于在高速下工作。但是为了可以安全的工作必须合理控制其运行速度。要提高它的控制速度又必须增加更加昂贵复杂的机械系统。 液压系统的参数,如温度或压力同样影响系统的稳定性。一个参数合理的液压系统比一个设计参数不合理的液压系统稳定,为了使整个系统运行稳定,有时必须降低次要的参数值。 2.2.2不经济性 目前的液压系统是纯液压的机械系统,因此如果用户想实现一个功能,他就必须买一个能使现这个功能的液压机械组件。因为大多数用户又不同的使用要求,要求同一个设备可以进行升级。这就意味着这些标准设备可以人为的改造,这就增加了组件升级费用。 2.2.3低效性 液体在液压系统的两个液压缸之间流动时效率较低。这是因为大多数液压阀都是用一个阀心来控制两个节流口,由于这个链接不可能使阀芯两侧的压力相