无模型自适应控制方法的应用研究
XXX
(北京化工大学自动化系,北京100029)
摘要:概述了一种新型的控制方法无模型自适应控制。目的是对当前无模型自
适应控制有一个总体的认识, 它是一种无需建立过程模型的自适应控制方法。与传统的基于模型的控制方法相比,无模型控制既不是基于模型也不是基于规则,它是一种基于信息的控制方法。无模型控制器作为一种先进的控制策略,具有很强的参数自适应性和结构自适应性。基于以上背景,首先介绍了无模型自适应控制的性质及特征,结合对北京化工大学405仿真实验室三级液位控制系统的仿真研究,并将其与PID控制器的效果进行了对比。仿真表明, 无模型控制器具有良好的抗干扰能力、参数自适应性和结构自适应性。
关键字:无模型;自适应;控制;
Model Free Adaptive Control Theory and its Applications
XXX
(Department of Automation, Beijing University of Chemical Technology
Beijing 100029)
Abstract: A new kind of control method model-free adaptive control is given. The purpose is to make MFA to be understood. Model free adaptive control(MFAC)theory is an adaptive control method which does not need to model the industrial process.Compared with traditional control methods based on modeling,MFAC is an advanced control strategy which based on information of Input/Output Data.It has parameter adaptability and structure adaptability.Based on the background,First the property and character of MFA are introduced, Then Combining 405 Simulation Laboratory of Beijing University of Chemical technology three- level control system simulation.The simulation results show that MFAC controller has excellent robustness,anti-jamming capability, parameter and structure adaptability.
1 引言
PID调节器规律简单、运行可靠、易于实现,目前仍然是工业生产过程控制系统中应用较广泛的一类控制器。然而, 传统的自适应控制器在处理非线性、可变结构及滞后对象时比较困难。鲁棒控制适用于将控制系统的稳定性和可靠性作为首要目标, 同时过程的动态特性已知且不确定性因素的变化范围可以预估的情况。预测控制系统的设计一般较为复杂, 需要由专家来完成, 它非常适用于先进过程控制和监督控制领域, 但不太适用于调节控制方面。本文介绍一种无模型自适应控制方法, 无模型自适应控制器(Model Free Adaptive)无需数学建模以及复杂的人工参数整定即可控制时变、多变量等复杂过程。
2 无模型控制方法的定义与分类
无模型控制理论与方法是指:“控制器的设计仅利用受控系统的I/O数据,控制器中不包含受控过程数学模型的任何信息的控制理论与方法”。按照这一定义,目前国内外已存在的典型无模型控制方法有:
1) PID类控制技术及相关的方法:PID控制利用偏差的比例(P)、积分(I)和微分(D)的线性加权和构成控制量,对被控对象进行控制。
2) 学习控制:包括迭代学习控制和重复控制。迭代学习控制在设计时不需要事先已知受控系统的数学模型,但系统的收敛性分析以及对控制器增益的选取则需要知道受控系统输出关于控制变量偏导数的上下界,并要求系统严格满足全局Lipschitz条件、系统可重复性两个条.
3) 无模型自适应控制。无模型自适应控制(Model Free Adaptive ,MFA),是一种无需建立过程模型的自适应控制方法。与PID、自整定PID、模糊控制、神经网络、专家系统控制等流行的控制方式不同的是,MFA既不是基于模型也不是基于规则,可以说它是一种基于信息的全新的控制方法。
3 无模型自适应控制系统的特征
无模型自适应控制系统无需过程的精确的定量知识, 系统中不含过程辨识机制和辨识器, 不需要针对某一过程进行控制器设计, 不需要复杂的人工控制器参数整定, 具有闭环系统稳定性分析和判据, 确保系统的稳定性.
1)过程辨识对于传统的自适应控制方法,如果不能获得过程的定量信息, 一
般需要采用某种辨识机制, 以在线或离线的方式获得系统的动态特性。由此产生了以下一些难以解决的问题需要离线学习辨识所需的不断的激励信号与系统平稳运行的矛盾模型收敛和局部最小值问题系统稳定性问题。MFA 控制系统中没有辨识环节, 因此可以避免上述问题。一旦运行,MFA控制器就可立刻接管控制。控制器中刷新权值的算法是基于一个单一的目标, 即缩小设定值和过程变量之间的偏差。
2)控制器设计MFA控制器是通用型控制器,并已经开发出一系列MFA控制
器用于控制各种问题回路。如SISO MFA控制器可直接取代PID, 免去了复杂的控制器参数整定;非线性MFA控制器能控制极端非线性过程;抗滞后MFA控制器能控制大滞后过程;MIMO MFA控制器能控制多变量过程前馈控制器能抑制可测的扰动;鲁棒MFA控制器能迫使过程变量维持在预定的范围。
3)控制器参数整定MFA自适应控制器不需要人工整定参数, 无模型自适应
控制器真正实现了这一点。无需参数整定, MFA就能自适应过程动态特性的变化并克服潜在的扰动以满足新的操作条件。
4)系统稳定性控制系统的闭环稳定性对于控制器是否实用非常重要。如果
掌握了闭环控制系统的稳定性判据, 就可以利用它来判断控制系统能否安全投人使用。
4 无模型控制器的仿真研究
在本文中,我们针对一种典型的工业被控对象的控制问题来讨论无模型控制器在实际中的应用。首先介绍被控对象的结构特点及其计算机控制系统的设计与构成,接着运用无模型自适应控制理论设计无模型控制器来进行计算机控制,最后给出系统仿真结果。通过计算机仿真来说明无模型自适应控制方案的有效性。本文还将对无模型控制器与PID控制器的控制效果进行仿真研究对比。
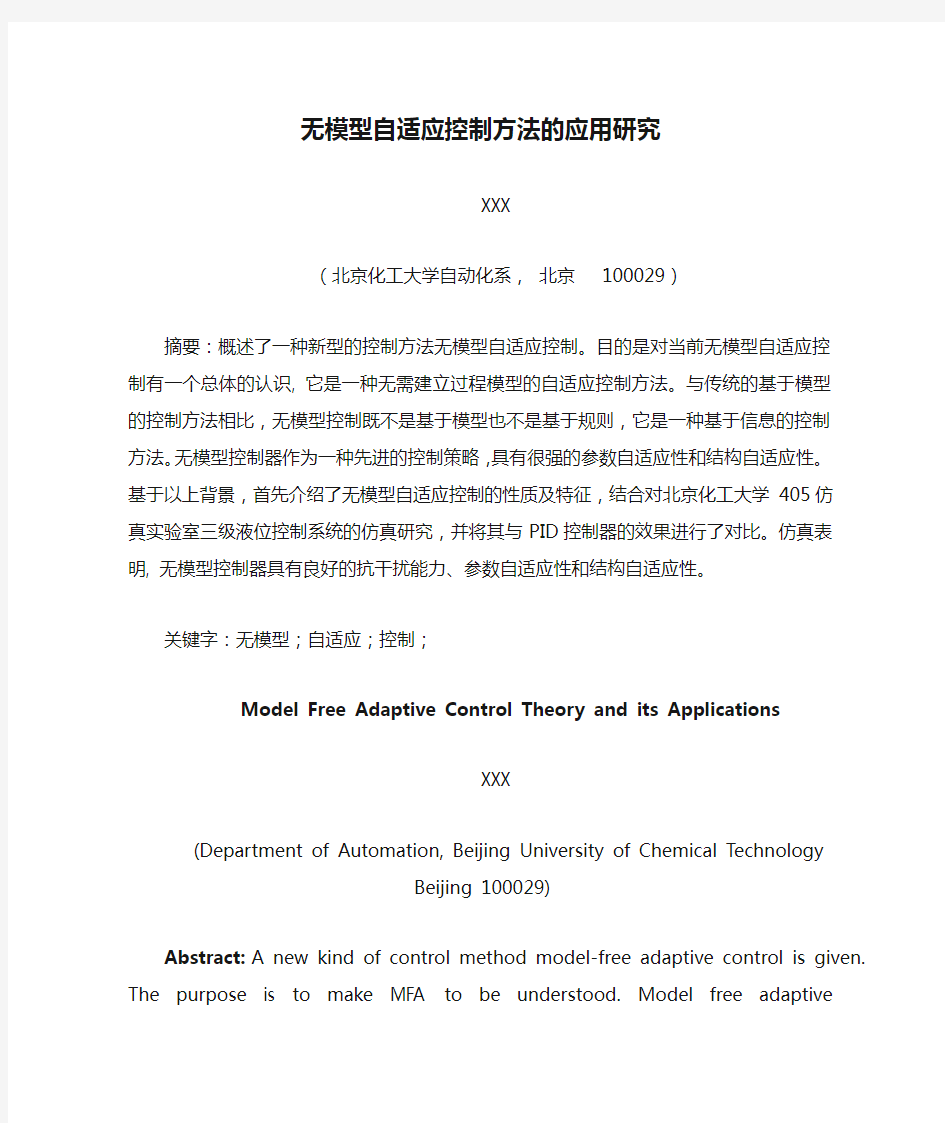
被控对象流程说明:见下图,第一级液位系统为卧式储罐,其上游设双效阀V1,入口流量F1,储罐液位L1,储罐下部出口快开阀S1(开关),离心泵,离心泵入口压力P2,离心泵出口压力P3,离心泵出口流量F2,离心泵高点排气阀S3(开关),排气完成指示灯D1,离心泵出口双效阀V2。第一级液位系统和离心泵另设独立的实验项目,系统结构及所有内容与三级液位的第一级完全相同。
针对此控制对象,本文设计了基于无模型自适应控制理论的无模型控制器。为了充分认识MFA的控制性能,本文也将针对同一被控对象设计了PID控制器。在同一条件下,对分别采用PID控制、无模型自适应控制设计的控制器进行了控制性能仿真对比。
1)无模型控制器设计
本文采用无模型控制理论设计MFA控制器,如下图所示,是采用以MFA
为控制器的线性系统的结构原理框图。
MFAC的控制律算法和伪偏导数估计算法如下,
系统初值设为
2)PID控制器设计
PID参数采用4:1衰减振荡法进行整定。
3)仿真结果分析
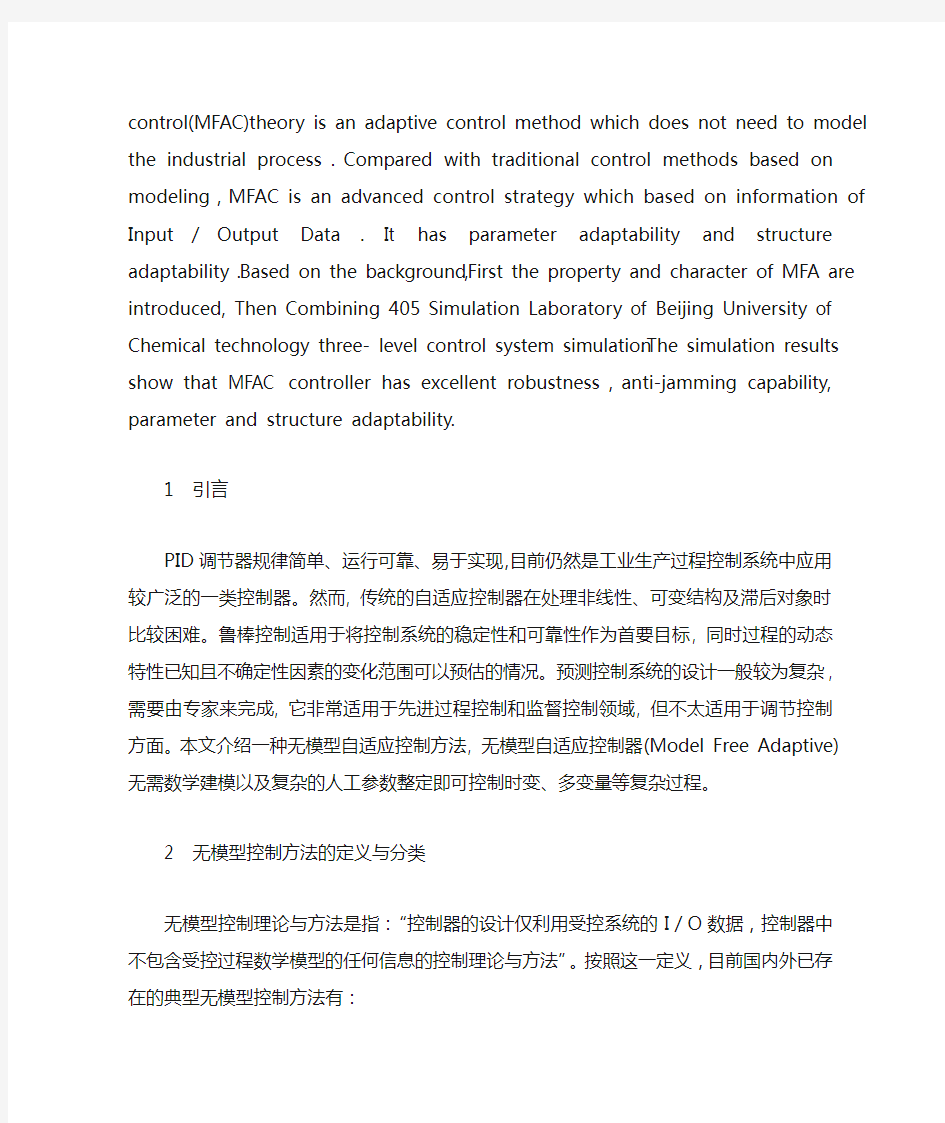
采用上述设计的PID控制器和无模型控制器,仿真结果分别见图1和图2。
图1 图2
由仿真结果分析可知:对于常规线性系统,模糊控制器和无模型自适应控制器都能很好地、快速实现其控制目标。但PID控制器伴随着剧烈的震荡调节过程,而无模型控制器在整个控制过程中,平滑性好,输出超调量也几乎为零。
5 MFA与其他控制策略的比较
PID, 模型预测控制, 鲁棒控制, 基于模型的自适应控制和无模型自适应控
制之间的比较见下表。
从上表中可看出, 结合了所有控制方法的优点, 是下一代主流过程控制器的最佳候选者。
6 结语
本文介绍的无模型自适应控制技术在多变量非线性过程中的成功应用, 显示了它的优点。MFA不需要过程的定量参数, 不需要过程辨识, 不需要复杂的控制器设计及参数的整定等步骤就可应用于复杂系统的控制。因此, 它在工业控制领域应用范围将更广。
参考文献:
【1】刘金琨,先进PID控制及其MATLAB仿真,北京:电子工业出版社,2003 【2】韩志刚,王德进,无模型控制器,黑龙江大学自然科学学报,1994,11(4):29-35
【3】韩志刚,无模型控制器的应用,控制工程,2002,9(4):22—25
【4】侯忠生,非参数模型及其自适应控制理论,北京:科学出版社,1999 【5】王千一,吴春诚,吴相林,玻璃窑炉的无模型自适应控制,2007,26(1):159-163
【6】朱凌峰,李宏光,PH过程的无模型自适应控制,仪器仪表用户,2006,13(4):44-45
10.自适应控制 严格地说,实际过程中的控制对象自身及能所处的环境都是十分复杂的,其参数会由于种种外部与内部的原因而发生变化。如,化学反应过程中的参数随环境温度和湿度的变化而变化(外部原因),化学反应速度随催化剂活性的衰减而变慢(内部原因),等等。如果实际控制对象客观存在着较强的不确定,那么,前面所述的一些基于确定性模型参数来设计控制系统的方法是不适用的。 所谓自适应控制是对于系统无法预知的变化,能自动地不断使系统保持所希望的状态。因此,一个自适应控制系统,应能在其运行过程中,通过不断地测取系统的输入、状态、输出或性能参数,逐渐地了解和掌握对象,然后根据所获得的过程信息,按一定的设计方法,作出控制决策去修正控制器的结构,参数或控制作用,以便在某种意义下,使控制效果达到最优或近似更优。目前比较成熟的自适应控制可分为两大类:模型参考自适应控制(Model Reference Adaptive Control)和自校正控制(Self-Turning)。 10.1模型参考自适应控制 10.1.1模型参考自适应控制原理 模型参考自适应控制系统的基本结构与图10.1所示: 10.1模型参考自适应控制系统 它由两个环路组成,由控制器和受控对象组成内环,这一部分称之为可调系统,由参考模型和自适应机构组成外环。实际上,该系统是在常规的反馈控制回路上再附加一个参考模型和控制器参数的自动调节回路而形成。
在该系统中,参考模型的输出或状态相当于给定一个动态性能指标,(通常,参考模型是一个响应比较好的模型),目标信号同时加在可调系统与参考模型上,通过比较受控对象与参考模型的输出或状态来得到两者之间的误差信息,按照一定的规律(自适应律)来修正控制器的参数(参数自适应)或产生一个辅助输入信号(信号综合自适应),从而使受控制对象的输出尽可能地跟随参考模型的输出。 在这个系统,当受控制对象由于外界或自身的原因系统的特性发生变化时,将导致受控对象输出与参考模型输出间误差的增大。于是,系统的自适应机构再次发生作用调整控制器的参数,使得受控对象的输出再一次趋近于参考模型的输出(即与理想的希望输出相一致)。这就是参考模型自适应控制的基本工作原理。 模型参考自适应控制设计的核心问题是怎样决定和综合自适应律,有两类方法,一类为参数最优化方法,即利用优化方法寻找一组控制器的最优参数,使与系统有关的某个评价目标,如:J=? t o e 2(t)dt ,达到最小。另一类方法是基于稳 定性理论的方法,其基本思想是保证控制器参数自适应调节过程是稳定的。如基于Lyapunov 稳定性理论的设计方法和基于Popov 超稳定理论的方法。 系统设计举例 以下通过一个设计举例说明参数最优化设计方法的具体应用。 例10.1设一受控系统的开环传递函数为W a (s)=) 1(+s s k ,其中K 可变,要求 用一参考模型自适应控制使系统得到较好的输出。 解:对于该系统,我们选其控制器为PID 控制器,而PID 控制器的参数由自适应机构来调节,参考模型选性能综合指标良好的一个二阶系统: W m (d)= 1 414.11 2 ++s s 自适应津决定的评价函数取 minJ =?t e 2 (t)dt ,e(t)为参考模型输出与对象输出的误差。 由于评价函数不能写成PID 参数的解析函数形式,因此选用单纯形法做为寻优方法。(参见有关优化设计参考文献)。 在上述分析及考虑下,可将系统表示具体结构表示如下图10.2所示。
无模型自适应(MFA)控制 无模型自适应控制的概念和意义 无模型自适应控制系统应具有如下属性或特征: ? 无需过程的精确的定量知识; ?系统中不含过程辨识机制和辨识器; ?不需要针对某一过程进行控制器设计; ? 不需要复杂的人工控制器参数整定; ? 具有闭环系统稳定性分析和判据,确保系统的稳定性。 下面结合燃烧过程的控制详细讨论以下五个问题,阐述无模型自适应控制理论的精髓: 过程知识 大多数先进控制技术都需要对过程及其环境有较深的了解,一般用拉普拉斯变换或动态微分方程来描述过程动态特性。然而在过程控制领域,许多系统过于复杂,或者其内在规律难以了解,因此很难得到过程的定量知识,这通常称为“黑箱”问题。 在许多情况下,我们可能掌握了一些过程知识但是不知道这些知识是否精确。在包括燃烧控制的过程控制中,经常碰到进料的波动,燃料类型和热值的改变,下游需求不可预测的变化以及产品尺寸、配方、批次和负荷等频繁的切换。这些就导致一个问题:即无法确定所掌握的过程知识的精确程度。这种现象通常被叫做“灰箱”问题。 如果能掌握过程的大量知识,那就是一个“白箱”问题。在这种情况下,基于对过程的了解,利用成熟的控制方法及工具设计控制器就容易多了。 尽管无模型自适应控制器可以解决黑箱、灰箱和白箱问题,但更适用于灰箱问题,事实上大多数工业过程都是灰箱问题。 过程辨识 对于传统的自适应控制方法,如果不能获得过程的定量信息,一般需要采用某种辨识机制,以在线或离线的方式获得系统的动态特性。由此产成了以下一些难以解决的问题: ? 需要离线学习; ?辨识所需的不断的激励信号与系统平稳运行的矛盾; ?模型收敛和局部最小值问题; ? 系统稳定性问题。 基于辨识的控制方法不适用于过程控制的主要原因是控制和辨识是一对矛盾体。好的控制使系统处于一个稳定状态,这种情况下设定值(SP)、控制器输出(OP)和过程变量(PV)在趋势图中显示出来的都是直线。任何稳定系统都会达到另一个稳定状态,而其中的过程动态特性的变化却不能被察觉,因此通常需要施加激励信号来进行有效的过程辨识。然而,实际生产过程很难容许这样做。 MFA控制系统中没有辨识环节因此可以避免上述问题。一旦运行,MFA控制器就可立刻接管控制。MFA控制器中
无模型自适应控制方法的应用研究 XXX (北京化工大学自动化系,北京100029) 摘要:概述了一种新型的控制方法无模型自适应控制。目的是对当前无模型自 适应控制有一个总体的认识, 它是一种无需建立过程模型的自适应控制方法。与传统的基于模型的控制方法相比,无模型控制既不是基于模型也不是基于规则,它是一种基于信息的控制方法。无模型控制器作为一种先进的控制策略,具有很强的参数自适应性和结构自适应性。基于以上背景,首先介绍了无模型自适应控制的性质及特征,结合对北京化工大学405仿真实验室三级液位控制系统的仿真研究,并将其与PID控制器的效果进行了对比。仿真表明, 无模型控制器具有良好的抗干扰能力、参数自适应性和结构自适应性。 关键字:无模型;自适应;控制; Model Free Adaptive Control Theory and its Applications XXX (Department of Automation, Beijing University of Chemical Technology Beijing 100029) Abstract: A new kind of control method model-free adaptive control is given. The purpose is to make MFA to be understood. Model free adaptive control(MFAC)theory is an adaptive control method which does not need to model the industrial process.Compared with traditional control methods based on modeling,MFAC is an advanced control strategy which based on information of Input/Output Data.It has parameter adaptability and structure adaptability.Based on the background,First the property and character of MFA are introduced, Then Combining 405 Simulation Laboratory of Beijing University of Chemical technology three- level control system simulation.The simulation results show that MFAC controller has excellent robustness,anti-jamming capability, parameter and structure adaptability.
%以下是侯忠生教授无模型自适应控制中的一个简单例子,在网上找了很多参考程序没找到,故而自己简单写了下,运行没问题,欢迎探讨。 clc,clear for k=1:1000 if k<=300 ys(k)=0.5*(-1)^round(k/100); elseif 300
第九章 模型参考自适应控制(Model Reference Adaptive Control )简称MRAC 介绍另一类比较成功的自适应控制系统,已有较完整的设计理论和丰富的应用成果(驾驶仪、航天、电传动、核反应堆等等)。 §9 —1MRAC 的基本概念 系统包含一个参考模型,模型动态表征了对系统动态性能的理想要求,MRAC 力求使被控系统的动态响应与模型的响应相一致。与STR 不同之处是MRAC 没有明显的辨识部分,而是通过与参考模型的比较,察觉被控对象特性的变化,具有跟踪迅速的突出优点。 设参考模型的方程为 式(9-1-1) 式(9-1-2) 被控系统的方程为 式(9-1-3) 式(9-1-4) 两者动态响应的比较结果称为广义误差,定义输出广义误差为 e = y m – y s 式(9-1-5); X A X Br y CX m m m m m ? =+= X A B r y CX S S S S S ? =+=
状态广义误差为 ε = X m – X s 式(9-1-6)。 自适应控制的目标是使得某个与广义误差有关的自适应控制性能指标J 达到最小。J 可有不同的定义,例如单输出系统的 式 (9-1-7) 或多输出系统的 式(9-1-8) MRAC 的设计方法目的是得出自适应控制率,即沟通广义误差与被控系统可调参数间关系的算式。有两类设计方法:一类是“局部参数最优化设计方法”,目标是使得性能指标J 达到最优化;另一类是使得自适应控制系统能够确保稳定工作,称之为“稳定性理论的设计方法。 §9 —2 局部参数最优化的设计方法 一、利用梯度法的局部参数最优化的设计方法 这里要用到非线性规划最优化算法中的一种最简单的方法—— J e d t = ?20 ()ττ J e e d T t = ?()()τττ
一 原理及方法 模型参考自适应系统,是用理想模型代表过程期望的动态特征,可使被控系统的特征与理想模型相一致。一般模型参考自适应控制系统的结构如图1所示。 图1 一般的模型参考自适应控制系统 其工作原理为,当外界条件发生变化或出现干扰时,被控对象的特征也会产生相应的变化,通过检测出实际系统与理想模型之间的误差,由自适应机构对可调系统的参数进行调整,补偿外界环境或其他干扰对系统的影响,逐步使性能指标达到最小值。 基于这种结构的模型参考自适应控制有很多种方案,其中由麻省理工学院科研人员首先利用局部参数最优化方法设计出世界上第一个真正意义上的自适应控制律,简称为MIT 自适应控制,其结构如图2所示。 图2 MIT 控制结构图 系统中,理想模型Km 为常数,由期望动态特性所得,被控系统中的增益Kp 在外界环境发生变化或有其他干扰出现时可能会受到影响而产生变化,从而使其动态特征发生偏离。而Kp 的变化是不可测量的,但这种特性的变化会体现在广义误差e 上,为了消除或降低由于Kp 的变化造成的影响,在系统中增加一个可调增益Kc ,来补偿Kp 的变化,自适应机构的任务即是依据误差最小指标及时调整Kc ,使得Kc 与Kp 的乘积始终与理想的Km 一致,这里使用的优化方法为最优梯度法,自适应律为: ??+=t m d y e B Kc t Kc 0)0()(τ Yp Ym e +__ + R 参考模型 调节器被控对象 适应机构 可调系统 ———kmq(s) p(s) Kc Kp q(s)-----p(s)适应律 R ym yp e +-
MIT 方法的优点在于理论简单,实施方便,动态过程总偏差小,偏差消除的速率快,而且用模拟元件就可以实现;缺点是不能保证过程的稳定性,换言之,被控对象可能会发散。 二 对象及参考模型 该实验中我们使用的对象为: 1 22) ()()(2 ++= =s s s p s q K s G p p 参考模型为: 1 21) ()()(2 ++= =s s s p s q K s G m m 用局部参数最优化方法设计一个模型参考自适应系统,设可调增益的初值Kc(0)=0.2,给定值r(t)为单位阶跃信号,即r(t)=A ×1(t)。A 取1。 三 自适应过程 将对象及参考模型离散化,采样时间取0.1s ,进而可得对象及参考模型的差分方程分别为: )2(0044.0)1(0047.0)2(8187.0)1(8079.1)(-+-+---=k r k r k y k y k y m )2(0088.0)1(0094.0)2(8187.0)1(8097.1)(-+-+---=k u k u k y k y k y p p p 其中u 为经过可调增益控制器后的信号。编程进行仿真,经大量实验发现,取修正常数B 为0.3,可得较好的动态过度过程,如下图3所示:
无模型自适应(MFA)控制技术 摘 要 MFA… 关键字:无模型自适应控制MFA …
目 录 无模型自适应(MFA)控制技术 (1) 单回路MFA控制系统 (1) MFA控制器结构 (2) SISO MFA控制算法 (3) MFA与PID (4) MFA控制系统的要求 (4) SISO MFA控制器设置 (5) 非线性MFA控制器(Nonlinear MFA) (5) 非线性MFA控制器设置 (6) MFA pH控制器(MFA pH) (6) MFA pH控制器设置 (7) 前馈MFA控制器(Feedforward MFA) (8) 前馈MFA控制器设置 (8) 抗滞后MFA控制器(Anti-delay MFA) (9) 鲁棒MFA控制器(Robust MFA) (10) 鲁棒MFA控制器设置 (11) 时变MFA控制器(Time-varying MFA) (12) 时变MFA控制器设置 (12) 抗滞后MFA pH控制器(Anti-delay MFA pH) (13) 多变量MFA控制器(MIMO MFA) (13) 两输入两输出MFA控制系统 (13) 2×2MFA控制器参数 (14) MIMO MFA控制器应用指南 (15) MFA控制方法论 (15) 总结 (16) 简易的解决方案 (16) 利用所有的过程信息 (16) 不依赖于信息的精确程度 (16) 将合适的技术应用于相应的场合 (16) 参考文献 (17)
无模型自适应(MFA)控制技术 无模型自适应(MFA)控制技术,顾名思义,是一种无需建立过程模型的一种自适应控制方法。MFA控制系统具有以下五点属性: 1. 不依赖于精确的过程知识; 2. 系统不含过程辨识机制; 3. 对一实际过程无需进行控制器设计; 4. 没有复杂的控制器参数整定过程; 5. 有稳定性分析和判据,保证闭环系统稳定。[1-3] 基于MFA核心控制技术,针对特殊的控制问题,设计了多种MFA控制器:[4-14] 标准MFA控制器(SISO MFA)-取代PID,免去了复杂的控制器参数整定; 非线性MFA控制器(Nonlinear MFA)-控制极端非线性过程; MFA pH控制器-控制pH过程; 前馈MFA控制器(Feedforward MFA)-抑制可测的扰动; 抗滞后MFA控制器(Anti-delay MFA)-控制大滞后过程; 鲁棒MFA控制器(Robust MFA)-迫使过程变量维持在预定的范围; 时变MFA控制器(Time-varying MFA)-控制大惯性、滞后时间不确定的过程; 抗滞后MFA pH控制器(Anti-delay MFA pH)-控制大滞后的pH过程; MIMO MFA控制器(多变量MFA)-控制多变量过程。 MFA控制器能很方便地嵌入于各种设备,并且越来越多的平台已经能提供这些先进的控制器,包括楼宇控制器、单回路控制器、可编程逻辑控制器(PLC)、混合式控制器、过程自动控制器(PAC),以及控制软件和集散控制系统(DCS)等。 单回路MFA控制系统 如图1所示,单回路MFA控制系统包括一个单输入单输出(SISO)过程,一个SISO MFA控制器和一个反馈回路。MFA控制器的控制目标是通过产生合理的控制作用()t u,()t y 迫使过程变量在设定值变化,存在扰动和过程动态特性改变的情况下仍然能跟踪设
这种新的自适应控制技术用来应付各种控制的挑战PID 回路控制着大部分工业装置中的自动化过程。比例-积分-微分算法简单、可靠,50年来被广泛用于成千上万个控制回路。 然而,并不是所有工业过程都可以用PID回路来控制。例如,多变量、非线性和时变等过程都需要用更先进的控制技术。曾几何时,这些技术只出现在学术界的实验室和航天领域,价廉物美的计算机平台的出现使得那些晦涩难解的算法接近了工业用户。 一 自适应控制就是这样的例子。早在1970年代,学术界和工业界的研究人员一直在研究能够自己学习和适应被控过程特性渐变的反馈控制器。 诚然,就迫使过程的输出调整到操作人员所需要的值来讲,所有的过程控制器都是‘自适应的’。然而大多数控制器是根据控制器开始工作之前由操作人员设计(至少是调整)好的算法运行的。操作员会定期地调整常规控制器的参数,在一般情况下,只有在控制器性能由于某种原因恶化后才由人工进行这种调整。真正的自适应控制器,即使过程的特性发生了变化,也能够在运行中自己调整参数以保持其最佳性能。这相当于自动改变控制器的整个策略以适应过程新的特性。例如,一个原先调好用于控制迟缓过程的自适应控制器,当它发现过程对控制作用的响应变得敏感时,就会采用比较保守的整定参数。而固定参数的常规控制器则会继续过度地控制该过程,造成过程的输出严重振荡。 自适应控制器的形式大小各异,也许最常见的是能够自己产生整定参数的自整定PID。1980年代推出的那些按指令或可连续整定PID参数的方法在单回路控制器中到处可见。许多自整定控制器采用专家系统来解决自身P、I、D参数的刷新问题。它们试图仿效控制专家的思维过程,按照一组旨在改善回路闭环性能的、复杂的经验规则来整定参数。当被控过程比较简单并且可以预测时,这种方法很奏效。许多专家自整定控制器都假设过程的动态特性可以完全用增益、滞后时间和时间常数加以量化。控制器无需知道这三个参数的值,但它假定控制器提供的过程输入与由此而生的过程输出之间的关系不受任何其它过程动态特性的影响。 当过程的动态特性变得复杂时问题就会出现。专家系统的规则可能会产生虚假的结果,因为它们并没有收录对付更复杂过程的经验。 在投运新回路时,专家自整定控制器会经历一段痛苦的历程。它们的规则一般被设计成用于处理过程动态特性的逐渐变化或用于校正已有的整定参数。在启用控制器时,一般需人工设定一组控制器的初始参数。 基于模型的自适应控制提供了比专家系统启发式逼近更为精确的控制算法。其控制决策建立在对过程的经验模型上,把输入输出的关系量化为一个微分方程。在连续控制过程的同时,它也能根据最新的输入输出数据提炼模型。 假定最新的模型可以保持到不久的将来,控制器就可以预测未来的过程变化并决定采取何种控制作用拨正其运行方向。考虑到意外因素或时变系统会影响控制作用的未来结果,控制器必须不断地更新自己的过程模型。 据本人的经验,这种方法比起基于规则的控制器,可以适应更广范的过程动态特性。基于模型的自适应控制器可以利用各种已开发出来的整定公式将模型参数转化成控制器参数,如P、I、D值。事实上,我推测这就是在线建模如此受宠
无模型自适应动态规划及其在多智能体协同控制中的应用 智能控制系统通过模拟人类获取知识的学习过程,可以有效弥补传统控制理论的不足,并且为克服复杂工业过程的技术难题提供新思路。自适应动态规划方法融合了神经网络、强化学习、自适应评价设计等思想,在应用于求解复杂系统的最优控制问题时可以避免动态规划算法中“维数灾难”问题。本文在自适应动态规划理论的基础研究上,对学习算法的收敛性和闭环系统的稳定性进行了深入探讨,并将 自适应动态规划应用于分布式多智能体协同控制。本文的主要工作如下:(1)借鉴优化问题的迭代寻优算法,将连续时间动态系统的最优控制问题描述为三个子问题,在此基础上提出了基于汉密尔顿泛函的理论框架。该理论框架从几何角度给出了最优控制问题迭代求解算法收敛的充要条件。最后利用李雅普诺夫理论证明了在该理论框架下闭环系统的稳定性。(2)针对离散时间动态系统的鲁棒控制问题,首先将该问题转化为辅助标称系统的最优控制问题,并从理论上给出了这种问题转化等价性的充分条件。然后仅利用系统在线运行数据,提出了一种基于数据的无模型自适应动态规划算法,解决了最优控制问题的求解依赖系统模型这一约束。同时也给出了无模型自适应动态规划算法收敛性和闭环系统稳定性证明。(3)针对领航者带有未知控制输入的异构多智能体系统输出同步控制问题,提出了无模型自适应动态规划,解决了目前已有方法对系统模型的依赖,设计了分布式输出同步控制律。此外,已有的多智能体输出同步控制律设计仅考虑了输出同步误差的渐近稳定性,本文提出的无模型自适应动态规划方法考虑了输出
同步误差的暂态性能,因而保证了该分布式输出同步控制律的最优性。 (4)针对具有多个领航者的异构多智能体系统的包含控制问题,利用 无模型自适应动态规划,设计了完全分布式的最优包含控制律。目前 已有的分布式控制律设计大多依赖于多智能体系统的全局拉普拉斯 矩阵特征值信息,而本文提出的分布式最优包含控制律设计解决了这 一问题,从而实现了真正意义上的完全分布式。最终给出了该算法的 收敛性和稳定性分析。
自动化专业综合设计报告 设计题目: 基于RBFNN的直接模型参考自适应控制所在实验室:matlab仿真实验室 指导教师:杜 学生姓名 班级文自112-2 学号201190 成绩评定:
仿真截图
三角输入 clear all; close all; u_1=0; y_1=0; ym_1=0; x=[0,0,0]'; c=[-3 -2 -1 1 2 3; -3 -2 -1 1 2 3; -3 -2 -1 1 2 3]; b=2*ones(6,1); w=[ 0.8283 0.3887 -0.8872 -0.3668 0.8233 0.8274]; xite=0.45; alfa=0.05; h=[0,0,0,0,0,0]'; c_1=c;c_2=c; b_1=b;b_2=b; w_1=w;w_2=w; ts=0.001; for k=1:1:4000 time(k)=k*ts; r(k)=0.2*sawtooth(2*pi*k*ts,0.5); ym(k)=0.6*ym_1+r(k); y(k)=(-0.1*y_1+u_1)/(1+y_1^2); %Nonlinear plant for j=1:1:6 h(j)=exp(-norm(x-c(:,j))^2/(2*b(j)*b(j))); end u(k)=w'*h; ec(k)=ym(k)-y(k); dyu(k)=sign((y(k)-y_1)/(u(k)-u_1)); d_w=0*w; for j=1:1:6 d_w(j)=xite*ec(k)*h(j)*dyu(k); end w=w_1+d_w+alfa*(w_1-w_2); d_b=0*b; for j=1:1:6 d_b(j)=xite*ec(k)*w(j)*h(j)*(b(j)^-3)*norm(x-c(:,j))^2*dyu(k); end
模型参考自适应控制 Document serial number【LGGKGB-LGG98YT-LGGT8CB-LGUT-
10.自适应控制 严格地说,实际过程中的控制对象自身及能所处的环境都是十分复杂的,其参数会由于种种外部与内部的原因而发生变化。如,化学反应过程中的参数随环境温度和湿度的变化而变化(外部原因),化学反应速度随催化剂活性的衰减而变慢(内部原因),等等。如果实际控制对象客观存在着较强的不确定,那么,前面所述的一些基于确定性模型参数来设计控制系统的方法是不适用的。 所谓自适应控制是对于系统无法预知的变化,能自动地不断使系统保持所希望的状态。因此,一个自适应控制系统,应能在其运行过程中,通过不断地测取系统的输入、状态、输出或性能参数,逐渐地了解和掌握对象,然后根据所获得的过程信息,按一定的设计方法,作出控制决策去修正控制器的结构,参数或控制作用,以便在某种意义下,使控制效果达到最优或近似更优。目前比较成熟的自适应控制可分为两大类:模型参考自适应控制(Model Reference Adaptive Control)和自校正控制(Self-Turning)。 模型参考自适应控制 10.1.1模型参考自适应控制原理
模型参考自适应控制系统的基本结构与图所示: 模型参考自适应控制系统 它由两个环路组成,由控制器和受控对象组成内环,这一部分称之为可调系统,由参考模型和自适应机构组成外环。实际上,该系统是在常规的反馈控制回路上再附加一个参考模型和控制器参数的自动调节回路而形成。 在该系统中,参考模型的输出或状态相当于给定一个动态性能指标,(通常,参考模型是一个响应比较好的模型),目标信号同时加在可调系统与参考模型上,通过比较受控对象与参考模型的输出或状态来得到两者之间的误差信息,按照一定的规律(自适应律)来修正控制器的参数(参数自适应)或产生一个辅助输入信号(信号综合自适应),从而使受控制对象的输出尽可能地跟随参考模型的输出。 在这个系统,当受控制对象由于外界或自身的原因系统的特性发生变化时,将导致受控对象输出与参考模型输出间误差的增大。于是,系统的自适应机构再次发生作用调整控制器的参数,使得受控对象的输出再一次趋近于参考模型的输出(即与理想的希望输出相一致)。这就是参考模型自适应控制的基本工作原理。
第九章模型参考自适应控制(Model Reference Adaptive Control )简称MRAC 介绍另一类比较成功的自适应控制系统,已有较完整的设计理论和丰富的应用成果(驾驶仪、航天、电传动、核反应堆等等) 。 § 9—1 MRAC的基本概念 系统包含一个参考模型,模型动态表征了对系统动态性能的理 想要求,MRAC力求使被控系统的动态响应与模型的响应相一致。 与STR不同之处是MRAC没有明显的辨识部分,而是通过与参考模 型的比较,察觉被控对象特性的变化,具有跟踪迅速的突出优点。设参考模型的方程为 * X m~ A m X m Br式(9-1-1) y m = CX m 式(9-1-2) 被控系统的方程为 ■ X s A s B s r式(9-1-3) y s - CX s 式(9-1-4) 两者动态响应的比较结果称为广义误差,定义输出广义误差为 e = y m -y s 式(9-1-5); 状态广义误差为
:=X m — s 式(9-1-6)。 自适应控制的目标是使得某个与广义误差有关的自适应控制性能指标J达到最小。J可有不同的定义,例如单输出系统的 J —;e2( )d 式(9-1-7) 或多输出系统的 t T J 二e T( )e( )d 式(9-1-8) MRAC的设计方法目的是得出自适应控制率,即沟通广义误差与被控系统可调参数间关系的算式。有两类设计方法:一类是“局部参数最优化设计方法”,目标是使得性能指标J达到最优化;另一类是使得自适应控制系统能够确保稳定工作,称之为“稳定性理论的设计方法。 § 9 —2局部参数最优化的设计方法 一、利用梯度法的局部参数最优化的设计方法 这里要用到非线性规划最优化算法中的一种最简单的方法梯度法(Gradient Method )。 1. 梯度法