
“平面内”地杂波散射系数
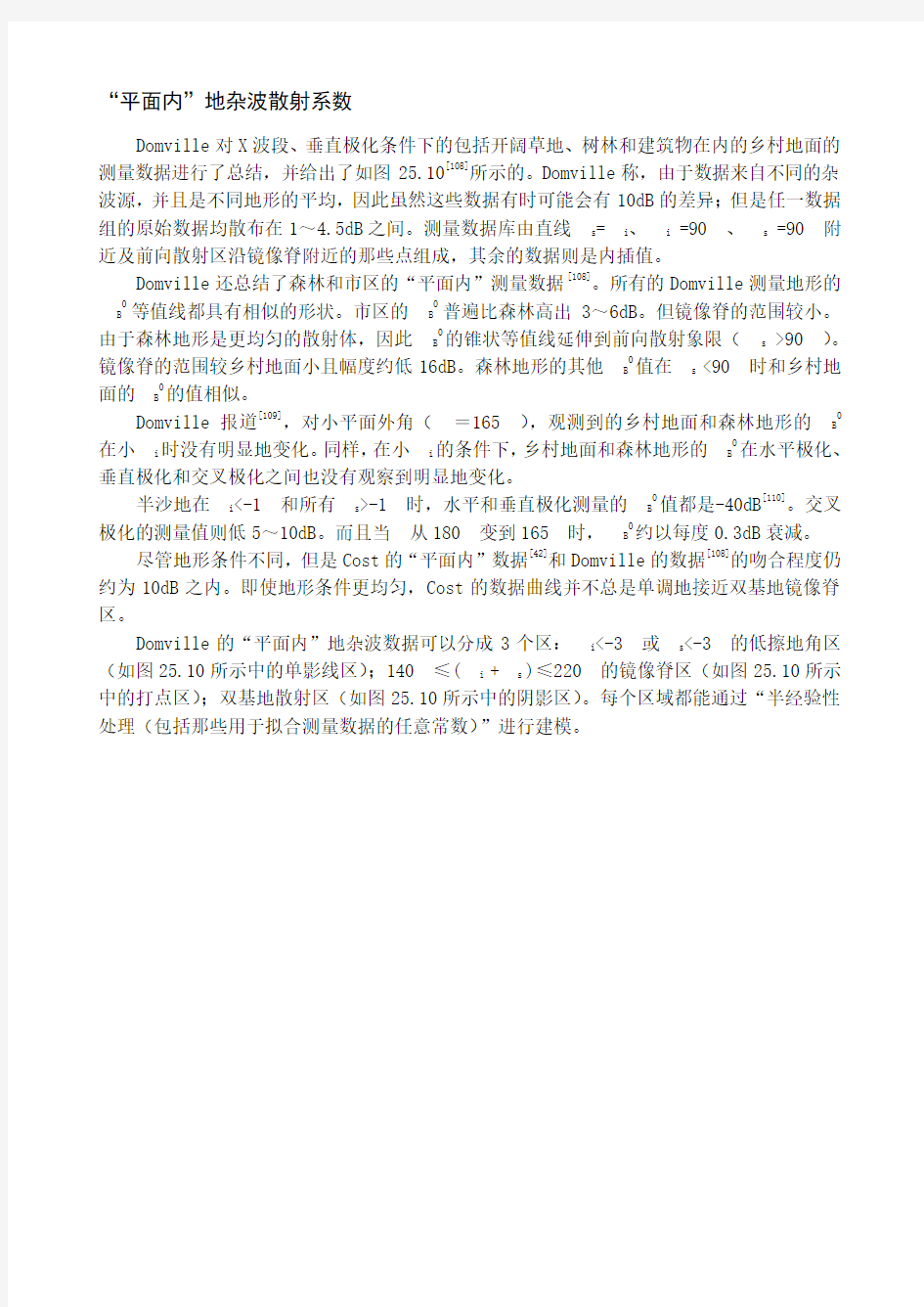
Domville对X波段、垂直极化条件下的包括开阔草地、树林和建筑物在内的乡村地面的测量数据进行了总结,并给出了如图25.10[108]所示的。Domville称,由于数据来自不同的杂波源,并且是不同地形的平均,因此虽然这些数据有时可能会有10dB的差异;但是任一数据组的原始数据均散布在1~4.5dB之间。测量数据库由直线s=i、i =90、s =90附近及前向散射区沿镜像脊附近的那些点组成,其余的数据则是内插值。
Domville还总结了森林和市区的“平面内”测量数据[108]。所有的Domville测量地形的
B 0等值线都具有相似的形状。市区的
B
0普遍比森林高出3~6dB。但镜像脊的范围较小。
由于森林地形是更均匀的散射体,因此B0的锥状等值线延伸到前向散射象限(s >90)。镜像脊的范围较乡村地面小且幅度约低16dB。森林地形的其他B0值在s<90时和乡村地面的B0的值相似。
Domville报道[109],对小平面外角(=165),观测到的乡村地面和森林地形的B0在小i时没有明显地变化。同样,在小i的条件下,乡村地面和森林地形的B0在水平极化、垂直极化和交叉极化之间也没有观察到明显地变化。
半沙地在i<-1和所有s>-1时,水平和垂直极化测量的B0值都是-40dB[110]。交叉极化的测量值则低5~10dB。而且当从180变到165时,B0约以每度0.3dB衰减。
尽管地形条件不同,但是Cost的“平面内”数据[42]和Domville的数据[108]的吻合程度仍约为10dB之内。即使地形条件更均匀,Cost的数据曲线并不总是单调地接近双基地镜像脊区。
Domville的“平面内”地杂波数据可以分成3个区:i<-3或s<-3的低擦地角区(如图25.10所示中的单影线区);140≤(i+s)≤220的镜像脊区(如图25.10所示中的打点区);双基地散射区(如图25.10所示中的阴影区)。每个区域都能通过“半经验性处理(包括那些用于拟合测量数据的任意常数)”进行建模。
图25.10 X 波段垂直极化平面内( =180°)乡村地面RCS 数据[108] 低入射余角散射区和双基地散射区是根据等单基地杂波模型建立的,即
i 0M sin θγσ= (25.20) 式中,M 0为单基地散射系数;I 为如图25.9所示中的单基地角或入射角; 为归一化反射率系数,对农田, -15dB ;对长有树木的丘陵, -10 dB [123]。 等双基地散射区模型可用修正的单-双基地等效原理(见25.8节)得到,此时式(25.20)
中的sin i 可用入射角正弦值和散射角正弦值的几何平均值(sin i sin s )1/2来代替,有[123]
2/1s i b 0B )sin (sin )(θθγσ= (25.21)
式中,(B 0)b 为双基地散射区散射系数。这时,可以根据如图25.10所示中的沿i =s 那条线的单基地数据把值估算出来。在式(25.20)中,用 =-16dB 得到的值与单基地数据的吻合程度在2dB 以内,式(25.21)用 =-16dB 得到的值与双基地数据的吻合程度在3dB
以内(包括前向象限的小三角形区域)。
用入射角和散射角的算术平均的正弦值sin[(i +s )/2]可表示低入射余角区模型,有
sin )(l 0B γσ=]2/)[(s i θθ+ (25.22)
式中,(B 0)1是低入射余角区的散射系数。取 =-16dB 所得出结果的吻合程度大约也是3dB ,包括如图25.10所示中的右上角的小四边形区域。因为(i +s )/2=i +/2,所以式(25.22)是单-双基地等效定理的精确应用。在入射余角非常低的情况下(i 或s <<-1),
但排除镜像脊区,计算(B 0)1时必须乘以方向图传播因子F T 2、F R 2和损耗因子L T 和L R [123]。 (B 0)s ≤1时的镜像脊区模型是用Beckman 和Spizzichino 关于粗糙表面前向散射理论
的变化形式来表示的[124][125],即
])/(exp[)(2S C s 0B σβσ-= (25.23)
式中,(B 0)s 为镜像脊区的散射系数;s 为地面坡度的均方根值;
c 为i 和s 的双基地角平分线与垂线的夹角为]2/)(90[s i θθ+-。 对于平坦地形,s 0.1ra
d 。对于(B 0)s ≤1的情况,当
s = 0.17rad 时,式(25.23)
与如图25.10所示中的镜像脊区数据的吻合程度在5dB 以内。 “平面内”海杂波散射系数
海杂波的有限测量[43][107][109]已经在“平面”内做过。Domville 的数据[109]
虽然包括了广泛的i 和s 测量条件,但遗憾的是只估算了风速条件而没有估算海况。在垂直极化时,
Domville 的X 波段数据[109]与Pidgeon 的C 波段数据[43]的差异约有10dB ,平均吻合程度在
5±dB 以内。在水平极化时,Domville 的X 波段数据[104]和Pidgeon 的X 波段数据[107]也有约10dB 的差异,但吻合程度大约只有±10dB 。 从有限的数据库和某些测量条件不确定来看,对这些数据建模时必须小心。当i 或s 保持不变时,可以直接用式(25.20)等 单基地杂波模型作为近似模型。对i 、s >~2和i +s <~100的区域,风速为20kn (完全形成时近似海况3级)时, =-20dB 和垂直极化数据的吻合程度约为5dB 。
s 低于约2时,方向图传播因子和损耗会影响测量结果。已经测得的B 0值为-50dB 5dB [43]。若测量时已包含方向图传播因子和损耗的影响,则有时也被称之为有效B 0[114]。当
i +s
>~1000、B 0>0dB 时,在镜像脊区内可达到+10dB 。水平极化时的B 0一般比垂直极化时低1~5dB [109],但和数据的偏差相比并不重要。当i <1时,交叉极化(VH )测得的B
0值比共极化(VV )的值低10~15dB ,但当i 3时,只低5~8dB [43]。
“平面外”散射系数
有限的“平面外”地杂波测量[42][111][112][115] 也已经进行过。Cost [42]和Ulaby [115]的数据表
明,由于它们和Larson [111][112]的数据之间存在着合理然而又有限的相关性,因此似乎不是一
个令人满意的可用数据模型。 但是,各种极化的一般变化趋势是明显的。首先,当趋近90°时,B 0值常趋近一个比单基地(I =s , =180)值低10~20dB 的最小值。其次,在<~10和>140
的情况下,即角度接近“平面内”,“平面外”的B 0值和“平面内”的B 0值没有明显的差别
(约在5dB 范围内)。限制条件<~10是根据Cost 、Ulaby 和Domville 的数据得出的,限制条件>140则是根据Ulaby 和Larson 的数据得出的。 在i 和s 接近擦地入射(即i ,s <<1)时,Ewell [113][114]测量了海杂波的“平面外”水平极化和垂直极化的B 0值。目测的海表面条件是0.9~1.8m 的浪高。双基地角 180-、测量范围为ο23ο85时,
Ewell 计算了双基地与单基地的散射系数(中值)比。这些数据隐含了方向图传播因子和损耗。由于天线高度的不同,F T ,F R 和L T 的影响预计会不同,但没有进行测量。对所有的情况,所测得的双基地与单基地的散射系数比都小于1。前两种情况,比值的变化范围是-2~-12dB 。而第三种情况,比值由 =23时的-5dB 下降到 =60时的-20~-25dB 。变化趋势是随的增大而减小。水平极化和垂直极化情况的比值没有明显的差别。在大多数情况下,双基地和单基地的数据显示接近于对数正态分布。 25.9 特殊技术、问题和要求
脉冲追赶[49][73][126][127][129]
已经提出的脉冲追赶概念是一种降低多波束双基地接收机的费用和复杂性的方法,也是作为解决空间同步问题的一种方法。这种最简明的脉冲追赶概念用单波束、单接收机和单路信号处理器取代了多波束接收系统(n 个波束、n 个接收机和n 路信号处理器),如图25.11所示。单接收波束的快速扫描发射波束覆盖的空间,实质上是追赶发射机的发射脉冲在空间传播的位置,所以就有了脉冲追赶这个术语。除求解双基地三角形所必须的一般要求外,脉冲追赶还要知道T 和脉冲发射时间[126],这些可通过数据链路提供给接收基地。另一方面,
如果发射波束的扫描速率和PRF 是均匀的,则当发射波束扫过接收基地时,接收基地就能估
算出这些参数[127]。
接收波束扫描速率必须等于发射机的脉冲传播速率,并需考虑通常的几何关系修正。这
个速率R θ&为
[73] R c R R /)2/tan(βθ=& (25.24)
在典型几何配置下,R
θ&的变化范围是1/s ~0.01/s 。这些速率和速率变化要求雷达采用无惯性天线,如相控阵和快速二极管移相器。在通常情况下,监视用的相控阵天线按程序以一个波束宽度为增量进行波束切换。小于波束宽度的切换则可通过改变阵列中的几对(对
称的)移相器的相位来实现。如此就可形成具有所需速率和速率变化的准连续扫描波束[128]。
由于从目标到接收机之间存在脉冲传播延迟,所以接收波束的指向角R 必须滞后于脉冲
的实际位置。对于形成双基地角的瞬间脉冲位置而言,R =T -2。由双基地三角形得所
需的接收波束指向角为[73] )sin cos (tan 2T
R T T 1T R θθθθL R R L -+-=- (25.25) 在收发波束重叠区的距离单元内,若接收波束要想截获所有的回波,则它的最小宽度(R )m 近似为
[73] R T T u m R /))2/tan(()(R R c θβτθ?+≈? (25.26)
式中,u 为压缩前的脉冲宽度。该式假定发射波束和接收波束的各自射线都是平行的。当(R T +R R )>>L 或L>>c u 时,这种近似是合理的。
图25.11 单波束连续扫描情况下的脉冲追赶
脉冲追赶的其他实现方案也是可行的。一种想法是保留n -波束接收天线,两个接收信号处理器(RSP )按时分复用工作,横跨这n 个波束。一个RSP 步进处理偶数波束,另一个步进处理奇数波束,这样就能同时处理各波束对内的回波信号:(1,2),(2,3),(3,4)等等。这种蛙跳式顺序在收、发波束重叠区应能截获所有的回波。
第二种想法是用两个波束和两个RSP 步进式地扫描由原n -波束天线所覆盖的空间。它采用同样的蛙跳顺序。这两种想法都以一个波束宽度为单位进行波束取样或步进,从而降低对分级波束扫描的要求。由于这两种想法在波束切换之前都处理来自两个波束宽度内的回波信
号,因此波束驻留时间T b 近似为2(R )m R R /c ,且步进率为T b -1。这里近似假定的相移时延
和稳定时间可以忽略。
波束同步扫描
如果双基地监视雷达的收、发都使用高增益扫描天线,则雷达能量就没有得到充分利用。这是因为在任一给定的时间里,只有当目标落在两个波束的重叠区(双基地“足迹”)内才能被观察到。对接收机来说,在“足迹”外被发射波束照射的目标被认为是被丢失了。解决波束同步的扫描问题有4种可能的补救方法:(1)在接收波束完成一个监视区域的扫描时间内,发射波束固定,然后发射波束步进一个波束宽度到第二个监视区域,如此直到发射波束步进
扫过整个监视扇区;(2)发射波束扫描,用多个同时接收波束来覆盖监视扇区;(3)发射波束扫描,接收波束追赶发射脉冲;(4)发射宽波束泛光照射监视扇区,接收波束在监视扇区内扫描。方法(1)和(4)需要专用的发射机,而方法(2)和(3)则不需要。
步进扫描发射机的补救方法增加了警戒区域内发射波束步进的次数。这种增加对用做监视而言通常是不能接受的,因而极少考虑采用这种方法。采用多波束接收的同步法则可使发射波束驻留在监视帧域的时间保持不变,但却使接收机的成本升高,复杂性增大。这是因为它要使用多波束天线,并且每个波束都要用一路RSP 。脉冲追赶同步法不需要多个波束和多路RSP ,但代价是要使用无惯性(相控阵)天线。这种天线要求复杂而又精确的波束控制时间表和/或多路复用,这取决于系统的配置。泛光发射机的同步法消除了这些复杂性。它具有数据率高同时又能服务于多个接收机的优点。其代价为信噪比降低,这是G T 降低的直接结果,它还引起副瓣杂波电平的增大。简言之,在波束同步扫描的问题上,若想不使监视性能恶化,则不存在简单而又廉价的补救方案 。
副瓣杂波
和单基地雷达一样,双基地雷达也必须对抗副瓣杂波。当收发都为陆基且以基线距离L 分置时,只有来自对发射机和接收机都具有满足视线(LOS )区域的地杂波才能进入接收天线副瓣。对光滑地面,用共同覆盖面积A c 来定义这个区域。根据式(25.9)、(25.10)和式(25.12),当h t =0且L ≥)(130T T R h h r r R +=+时,地杂波的A c 等于零,没有副瓣杂波(或主瓣杂波)进入接收天线。双基地雷达在热噪声背景下能检测出那些对发射机和接收机都能满足视线要求的目标。这类似于单基地雷达能检测出距离r T 以外的目标。
上面的推导只适用于海表面,对陆地却很少有效。在陆地,变化的地形在L
当发射机和/或接收机被升高或机载时,视线的约束大为减轻,但不一定会消除。在这种情况下,双基地雷达会遇到特有的两个杂波问题。第一个杂波发生在使用泛光发射波束的情形,仅有单程接收天线副瓣使副瓣杂波电平下降,而单基地雷达有双程副瓣杂波下降。
第二个杂波发生在发射机和/或接收机运动的情形,如机载。这时,双基地杂波的多普勒回波出现失真和展宽,与每一片杂波区的几何位置和收发平台的运动状况有关。多普勒失真用多普勒等值线来定义,式(25.18)给出了两维坐标下平坦地面的多普勒等值线。多普勒失真与距离和角度有关。机载单基地雷达不存在距离失真效应。特定副瓣距离单元上的杂波展宽以该距离单元内存在的多普勒失真为中心。
伴随杂波电平的增大,这些失真和展宽效应使得双基地雷达在杂波中检测目标的能力变得相当复杂。其补救办法包括使用常规的多普勒滤波和大时间-带宽波形;可能的话,合理地使用遮蔽;控制几何关系,特别是在使用专用式或合作式发射机的双基地雷达中;设计非常低的接收(可能的话,也包括发射)天线副瓣电平;对产生离散杂波回波的副瓣消隐;对均匀杂波在恒虚警率(CFAR )单元内进行距离或距离-多普勒平均;空间切除杂波回波。最后一项技术的实现依赖于已知双基地雷达的几何关系和运动状况,从而预测给定区域内杂波的多普勒和多普勒展宽,然后设置一个滤波器或波门以切除该区域内的主瓣杂波回波。按这种方
法对距离多普勒空间的切除量可高达8%[45]。
时间同步
为了测距,发射机和接收机之间应保持时间同步。在一次操作期间,通常要求的定时精度为发射机(压缩后)脉冲宽度的几分之一量级。时间同步可通过直接接收发射机发来的信号来完成,需要的话要进行信号解调,然后用这个解调后的信号同步接收机的时钟。如果发射机和接收机间存在满足要求的视线的话,则发射信号可通过陆地通信线路传输,或通过通信链路传输,或直接以发射机RF信号输出。若没有这样的视线,则同步信号也可经散射路径传输,因为散射体可满足收发视线的要求 [49]。此时,散射体必须处于式(25.12)所定义的公共覆盖区内。特殊情况也可经由对流层散射来传输[50]。在所有这些直接时间同步方案中,实现方法是直截了当的,就像通信系统中的最初的同步过程一样。这些方法也可用于任何类型的发射脉冲重复间隔(PRI)调制,即固定的、参差的、跳动的和随机的PRI调制等。建立时间同步后,目标距离就可由式(25.7)或类似的方法计算。
对固定的PRI,时间同步可通过在发射基地和接收基地使用相同的稳定时钟来直接完成,时钟周期性地进行同步。例如,当发射机和接收机中的一个或两个机动时,只要它们在视线内或是在一起就可采用直接时间同步法。可供选择的是将稳定时钟作为另一种时钟的从属,如将卫星全球定位系统(Navstar GPS)或远程无线电导航系统(loran C)作为主时钟源[50][82][130]。如果随机编码序列是先验的且接收基地也预先被告知,那么采用随机PRI的专用或合作式发射机系统也可使用间接时间同步法。
采用直接时间同步时,校正期间所需的时钟稳定度是T u(一阶)。式中,为所要求的定时精度;T u为时钟校正间隔。校正间隔的典型范围从发射机脉间期间的最小值到发射天线扫描周期的最大值。前者通常需要发射机和接收机间有专用的链路;后者在有满足要求视线的条件下,只要发射波束扫过接收基地就能实现同步,这种方法有时被称做“直接穿透(Direct breakthrough)[130]”。温控晶体振荡器通常就可以满足这些要求。
但是,在采用“直接穿透”时间同步法时,多径和其他传播异常及无线电频率干扰(RFI)均会降低校正精度。当存在直接视线时,已测量的“直接穿透”时间同步法的误差为±1s[131]。
±s[130]。
对流层传播路径使误差增加到5
由于间接时间同步法使用了两个时钟,因此时钟的稳定度是 2 T u(一阶)。因T u 是小时量级的,所以通常要用原子钟来满足这一要求。作为原子钟必备的一部分,温控晶振通常能满足短期(<1s)的稳定度要求。据报道,若稳定时钟从属于另一时钟源,则loran-C 定时精度的估算值为0.5s,Navstar GPS<0.1s[82]。
雷达简介及分类 英文中的“radar”(雷达)一词来源于缩略语(RADAR),表示“radio detection and ranging”(无线电检测与测距)。现如今,由于它已经成为一项非常广泛实用的技术,“radar”一词也变成一个标准的英文名词。它是利用目标对电磁波的散射来发现,探测、识别各种目标,测定目标坐标和其它情报的装置。在现代军事和生产中,雷达的作用越来越显示其重要性,特别是第二次世界大战,英国空军和纳粹德国空军的“不列颠”空战,使雷达的重要性显露的非常清楚。雷达由天线系统、发射装置、接收装置、防干扰设备、显示器、信号处理器、电源等组成。其中,天线是雷达实现大空域、多功能、多目标的技术关键之一;信号处理器是雷达具有多功能能力的核心组件之一。 雷达的分类: 雷达种类很多,分类方法也很复杂,以下列举部分分类方法: (1)按定位方法可分为:有源雷达、半有源雷达和无源雷达。 (2)按装设地点可分为;地面雷达、舰载雷达、航空雷达、卫星雷达等。 (3)按辐射种类(雷达信号形式)可分为:脉冲雷达和连续波雷达、脉部压缩雷达和频率捷变雷达等。 (4)按照角跟踪方式可分为:单脉冲雷达、圆锥扫描雷达和隐蔽圆锥扫 描雷达等。 (5)按工作频段可分为:米波雷达、分米波雷达、厘米波雷达和其它波段雷达、超视距雷达、微波雷达、毫米波雷达以及激光雷达等。 (6)按照目标测量参数可分为:测高雷达、二坐标雷达、三坐标雷达和 故我识对雷达、多站雷达等。 (7)按照天线扫描方式可分为:分为机械扫描雷达、相控阵雷达等。 (8)按照雷达采用的技术和信号处理的方式可分为:相参积累和非相参 积累、动目标显示、动目标检测、脉冲多普勒雷达、合成孔径雷达、边扫描 边跟踪雷达。 (9)按用途可分为:空中监视雷达(如远程预警、地面控制的拦截等)、 空间和导航监视雷达(弹道导弹告警、卫星监视等)、表面搜索和战场监视 雷达(地面测绘、港口和航道控制)、跟踪和制导雷达(表面火控、弹道制
“平面内”地杂波散射系数 Domville对X波段、垂直极化条件下的包括开阔草地、树林和建筑物在内的乡村地面的测量数据进行了总结,并给出了如图25.10[108]所示的。Domville称,由于数据来自不同的杂波源,并且是不同地形的平均,因此虽然这些数据有时可能会有10dB的差异;但是任一数据组的原始数据均散布在1~4.5dB之间。测量数据库由直线s=i、i =90、s =90附近及前向散射区沿镜像脊附近的那些点组成,其余的数据则是内插值。 Domville还总结了森林和市区的“平面内”测量数据[108]。所有的Domville测量地形的 B 0等值线都具有相似的形状。市区的 B 0普遍比森林高出3~6dB。但镜像脊的范围较小。 由于森林地形是更均匀的散射体,因此B0的锥状等值线延伸到前向散射象限(s >90)。镜像脊的范围较乡村地面小且幅度约低16dB。森林地形的其他B0值在s<90时和乡村地面的B0的值相似。 Domville报道[109],对小平面外角(=165),观测到的乡村地面和森林地形的B0在小i时没有明显地变化。同样,在小i的条件下,乡村地面和森林地形的B0在水平极化、垂直极化和交叉极化之间也没有观察到明显地变化。 半沙地在i<-1和所有s>-1时,水平和垂直极化测量的B0值都是-40dB[110]。交叉极化的测量值则低5~10dB。而且当从180变到165时,B0约以每度0.3dB衰减。 尽管地形条件不同,但是Cost的“平面内”数据[42]和Domville的数据[108]的吻合程度仍约为10dB之内。即使地形条件更均匀,Cost的数据曲线并不总是单调地接近双基地镜像脊区。 Domville的“平面内”地杂波数据可以分成3个区:i<-3或s<-3的低擦地角区(如图25.10所示中的单影线区);140≤(i+s)≤220的镜像脊区(如图25.10所示中的打点区);双基地散射区(如图25.10所示中的阴影区)。每个区域都能通过“半经验性处理(包括那些用于拟合测量数据的任意常数)”进行建模。
基于非合作照射的目标探测11’——-__—-_———__——_———_●●—●--—●●—__—————●—_●—————_—_—————_●●●—_—_____————__●—●———_—●—___————●———_———_———--—-●————__ 图1基于调频广播信号目标探测原理图图1为电台发射天线B、目标T和接收机A三者之间的相互位置关系示意图。调频广播载频范围为80~108MHz,调频范围为20~20kHz。图中,S。为直达信号,S。为经由目标而来的散射信号。接收机的接收信号为z=S。+S。。接收信号的谱相关为 刚r)一-f加)砒一蹦2“dt(1)R口(r)可以看作是接收机接收信号z(£)经过频移后与其原信号之间的相关函数。 由于目标在运动,s2相对于S-来讲,除了有一时延出外,在频域上还附加了一个多普勒频率^。因此,谱相关函数砖(r)将在(出,^)处产生一个峰。换句话说,通过峰值点的检测可确定两路信号之间的时差和目标的运动速度;多普勒频率的检测可将运动目标与静止目标区别开来。 在单一目标存在的情况下,谱相关图形如图2所示。图中峰值位置所对应的时间、频率分别对应于时差&和多普勒频率^。假定有两个目标的散射信号进入接收机,谱相关图形分别如图3所示。可见该系统具有分辨多目标的能力,通过时域或频域谱相关峰值检测可以很好地分辨两个(或多个)目标。 图2。单目标时的直达波与回波的谱相关 图3两个目标时的谱相关 通过以上分析可以看出,利用谱相关(或其他分析方法)的原理完全能够实现对运动目标的检测,并能同时观测多个目标的速度,得到用于定位的时差数据。 3研究现状 3.1英国防御研究局(DERA)的无源跟踪探测定位系统 20世纪80年代初英国伦敦学院GriffithsHD教授等人首先利用电视信号对运动目标进行定位n],由于经费和当时的技术条件的限制,对大多数情况试验结果是否定的,但也得到了一些有价值的结论。随后,美国试验了利用星基信号作为照射源对运动目标探测与定位,结果表明可以达到很高的精度,但由于受灵敏度的限制,接收机探测距离小于4km。1985年波音公司的Ham—merle分析了以护航式干扰机的干扰信号作为照射源,对入侵飞机架次进行识别的原理和可行性。ThompsonEG在1989年美国IEEE国家雷达会议上透露美国已开展了利用预警机E一3A和联合监视目标攻击雷达系统(J—STARS)飞机作为非合作照射源,然后用无源接收机来发现和检测飞行目标的研究。 1992年GriffithsHD教授等人还发表了名为“Bistaticradarusingsatellite-borneillumina—torsofopportunity”的文章。近年来,还有人研究了利用GPS卫星的辐射信号作为照射源的可能性。1994年左右,英国的HowlandPE重新构建了一种利用电视信号对运动目标进行定位的系 统[2],他考虑到TV信号的TDOA信息易模糊,
解读我国探地雷达的应用现状及展望 发表时间:2019-04-26T16:27:00.530Z 来源:《基层建设》2019年第4期作者:李柯辉[导读] 摘要:本文从建筑工程质量检测、岩土工程勘察及地质勘探、城市基础设施探测、公路、铁路质量检测、水利工程探测、考古探测、军事及安全领域等方面,对我国探地雷达的应用现状进行了说明,并阐述了我国探地雷达的应用展望,以期为促进我国对探地雷达技术的更好应用,推动我国更多领域的发展提供参考。 广东省公路工程质量监测中心广东广州 510500摘要:本文从建筑工程质量检测、岩土工程勘察及地质勘探、城市基础设施探测、公路、铁路质量检测、水利工程探测、考古探测、军事及安全领域等方面,对我国探地雷达的应用现状进行了说明,并阐述了我国探地雷达的应用展望,以期为促进我国对探地雷达技术的更好应用,推动我国更多领域的发展提供参考。 关键词:探地雷达;应用现状;展望引言 就探地雷达而言,其在我国之中也被称为地质雷达,于应用方面主要是通过对频率在106到109Hz的超高频脉冲电磁波的利用,来实现对地下介质所具有的分布特征方面的有效探测的一种地球物理方法,且在近年来的不断发展之中,其在应用范围方面也愈加广阔,呈现出一片大好的应用前景。 一、我国探地雷达的应用现状 (一)在建筑工程质量检测之中的应用对于建筑工程领域而言,其一系列工作的开展,都需要相应的数据作为支撑,也就是说其对于数据本身的可靠性方面的要求较高,但就实际情况而言,其中包含了很多具有较高隐蔽性的工程,若仅仅通过常规手段展开数据的获取,则存在较大的困难。但就我国当前阶段的探测雷达技术应用而言,其在建筑工程质量检测领域之中的应用具有较为良好的成效,能够对以上的问题良好的解决,其能够针对建筑工程建设施工之中,缺陷部位与完好部位介质之间的介电常数差异性的对比,来对其中存在的较为隐蔽的质量缺陷良好的探测出来,以便于对缺陷部位问题进行及时的了解及补救。在探地雷达技术实际应用于建筑工程质量检测之中时,其往往是在建筑物的结构及探伤、混凝土浇筑的质量、保护层厚度及其中钢筋的分布情况等方面发挥相应的探测作用。 (二)在岩土工程勘察及地质勘探之中的应用在岩土工程勘察及地质勘探工作的开展之中,常规的地质勘查方法都是以钻孔勘查为主,其虽然发挥了一定的作用,但因勘查的过程之中其钻孔的数量毕竟有限,使之难以对工程建设开展区域地下地层的分布情况及相应的特征全面的掌握,这便会对工程实际的建设开展带来一定的质量及安全方面的隐患。此时,在建设所在区域地质勘查工作之中对探地雷达加以应用,能够对其快速且大面积普查的优势加以发挥,进而能够对传统钻孔勘查的缺陷加以弥补,实现对地下之中的障碍物分布情况、回填土所具有的厚度、地下断裂发育以及地层分层特征等方面的情况及内容拥有较为全面的了解,进而能够为岩土工程整体设计施工的开展提供有利依据。此外,在实际开展岩土工程勘察及地质勘探时,将探地雷达技术与其他技术相结合,能够实现对地基及矿产资源调查、地层划分、断层及断裂查找、水文地质勘察等方面情况的良好勘察,以便于拥有更高依据的开展施工操作。 (三)在城市基础设施探测之中的应用在城市整体的运行过程之中,其基础设施探测工作的开展必不可少,且所包含的内容较多,有地下空洞、金属及非金属管线探索、突发工程事故抢险、城市路面坍塌等等,但又因为城市之中本身的环境条件较为复杂,存在电磁干扰、机械振动等多方面的干扰源,致使大多数探测方法的开展都难以达到相应的探测效果。此时,应用探地雷达技术其本身的天线具有一定的屏蔽功能,使之能够无惧干扰正常开展探测工作,尤其是在桩基及复合地基等基础工程之中,能够实现对地基加固效果方面的准确检测。 (四)在公路、铁路质量检测之中的应用随着近年来我国公路及铁路领域的飞速发展,因探地雷达技术本身所具有的优势,使之在以上领域之中获得了较为广泛的应用,对其分别进行说明,则可分为以下几点。第一点,在公路建设方面,充分发挥了探地雷达的探测精度及速度方面的优势,使之能够在公路路基、路基病害检测、桥梁结构及沥青厚度的检测方面良好的发挥作用,经由相应的雷达图像,能够实现对缺陷部位的清晰观看。第二点,在铁路建设方面,探地雷达技术已经在包括翻浆、裂缝、孔洞等在内的路基病害检测、路基岩溶、采空区等方面的探测工作之中发挥了作用,并达到了较为良好的应用效果。就近年来的发展情况来看,探地雷达于铁路路基领域之中的应用,已经由原本的未经运营状态之下得到铁路线路探测,逐渐向处于通车运行状态之下的铁路线路方向发展,且正在着力开展轨道车载式铁路路基质量检测系统的大力研发工作[1]。 (五)在水利工程探测之中的应用就探地雷达技术而言,其在我国水利工程领域之中的应用,主要是在工程开展前期的滑坡体与基岩埋深方面的勘察工作,中期的水利工程施工质量、堤坝隐患探测等方面的应用,不仅仅能够对整体的施工开展及施工质量提供保障,还能够对施工整体的进度及质量控制工作的开展达到一定的促进作用。其中,探地雷达应用效果最佳的便是在水利工程的质量检测及地把隐患问题的探测方面,仅仅在这两个方面的应用,便已经帮助水利工程建设解决了诸多的施工问题[2]。 (六)在考古探测之中的应用在考古这一领域之中,探地雷达技术的应用本身便拥有较高的优势,其能够通过其优越的低下探测能力,实现对低些埋藏物、地下墓穴、古遗址及古文化层埋深等方面的良好探测及调查,进而能够提升考古的整体水平,但就当前阶段的发展而言,虽然我国于此方面的起步较晚,但到目前为止已经取得了一定的成就,如我国的中国地质大学便利用这一技术,开展了针对位于甘肃省的敦煌莫高窟这一古遗迹的探索及研究工作。 (七)在军事及安全领域之中的应用就我国而言,与国外的许多国家相比,将探地雷达技术应用于军事及安全领域的开展年限较短,于我国而言仍旧属于拓展及探索领域,到目前为止其主要是在建筑物内的隐蔽物、地下隐蔽物及战争遗留未爆炸物等方面的探测之中加以应用,可以达到较好的开展效果,具有较好的应用前景。
雷达技术综述 Overview of Radar Technology 摘要: 雷达被广泛用于军事预警、导弹制导、民航管制、地形测量、气象、航海等众多领域。本文首先概述了雷达发展历程并总结了雷达技术发展的成因,然后对雷达的基本工作原理和基本雷达方程作了简要的介绍。最后介绍了几种实际雷达并指出了雷达的未来发展方向。 关键词: 雷达技术;工作原理;雷达应用;发展趋势 Abstract: Radar is widely used in many fields of military early warning, missile guidance, aviation control, topographic surveying, meteorology, navigation and so on.This paper outlines the development process of radar and summarizes the causes of the development of radar technology,then briefly introduces the basic principle of radar and basic radar equation.Finally, introduces several kinds of practical radar and points out the future development direction of radar. Key words: radar technology; working principles; radar applications; trend in development 引言 雷达是英文Radar的音译,源于radio detection and ranging的缩写,原意为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。雷达最先是作为一种军事装备服务于人类,主要用来实施国土防空警戒,指挥和引导己方作战飞机以及各种地面防空武器。随着雷达技术的不断改进,如今雷达被广泛用于民航管制、地形测量、气象、航海等众多领域。随着高科技的不断发展,雷达技术将在21世纪得到更广泛的应用。 1 雷达的发展历程 雷达诞生于20世纪30年代,从美、欧等发达国家的雷达装备技术发展来看,雷达的发展历程大致经历了4个阶段:第1个阶段是从20世纪30年代到50年代,为实施国土防空警戒,指挥和引导己方作战飞机以及各种地面防空武器(高炮、高射机枪、探照灯等),西方大量研制部署米波段雷达和以磁控管为发射机的微波雷达。当时雷达探测目标的种类简单,主要是飞机,此外还有少量的飞艇和气球,雷达的典型技术特征是电子管、非相参,这种雷达被称为第1代。 第2个阶段是从20世纪50年代到80年代,防空作战对雷达提出了由粗略
双(多)基地雷达技术概述 1. 概念和定义 双基地雷达是使用不同位置的天线进行发射和接收的雷达系统。当发射天线转动时,发射脉冲就在空间传播,遇到目标便反射电磁波,接收站接收回波,从中检测出目标。由于接收和发射异地,所以要利用发射波束与基线的夹角、距离和以及基线距离来解算双基地空间三角形,求出目标到发射站或接收站的距离以及目标到接收站与基线的夹角,这样接收站形成波束对准回波方向,并接收到目标信息。双基地雷达工作原理的几何关系下图所示。 若系统使用两个或多个具有公共覆盖空域的接收基地,并且每个基地的目标数据在一个中心站融合,则这种系统被称为多基地雷达。由稀疏分布阵列、随机分布阵列、畸变分布阵列和分布阵列构成的雷达、干涉仪雷达、无线电摄影和多基地测量系统有时被认为是多基地雷达的分支。它们通常是将来自每个基地的数据用相参的方式进行融合以形成大的接收孔径。多部发射机也能用于上述任何一种系统,可置于单独的基地或和接收机放在同一个基地。雷达网中三部测距单基地雷达组网有时被称为三边测量雷达。三边测量的概念也用在多基地雷达中,它借助到达时间差(TDOA)或差分多普勒技术来测量目标位置。 2. 发展历史 美国、英国、法国、前苏联、德国和日本的早期试验雷达都采用双基地体制,发射机和接收机的放置间距与目标距离相当。这些雷达采用连续波发射机,检测发射机直达信号和动目标散射的多普勒频移信号间的拍频。早期双基地雷达的许多技术都源于当时的通信技术:分置的基地,连续波发射,25~80MHz频率范围。此外,这些双基地雷达组成了当时典型的地面防空体系,用于探测20世纪30年代出现的主要威胁——飞机,但当时的技术未能很好地解决目标位置信息的提取问题。 1936年,NRL发明了收发开关,实现了收发共用一部天线。这种只有一个基地的体制就是人们熟悉的单基地雷达。它极大地扩大了雷达的用途,特别是适用于飞机、舰船和地面机动部队,结果使双基地雷达研究处于停滞阶段。 20世纪50年代初,探测飞机的要求又重新激起人们对双基地雷达的兴趣。美国的AN/FPS -23雷达是北极远程早期预警(DEW)线防空系统的低空雷达,始建于50年代中期,但不久就被拆除了。加拿大的McGill防空系统也采用了双基地体制。美国的Plato和Ordir弹道导弹探测系统是第一批多基地雷达。它们对每个接收站的距离和多普勒信息进行融合,从而估计目标的位置,但这两个系统没有部署。 在20世纪50年代和60年代初,人们编写了双基地雷达系统理论,提出了双基地RCS理论,并且进行了双基地雷达目标截面积和杂波的测量。双基地雷达的名称是由K.M.Siegel和R.E.Machol于1952年提出的。 雷达抗后向有源干扰和抗反辐射导弹(ARM)的需求,使双基地雷达在20世纪70年代和80年代重新得到重视。通过选择收发设备的位置可降低后向干扰,如将接收站置于干扰机的主波束外而让干扰机指向发射站。若将发射机从战场前方转移到后方,则发射机就不易受到
摘要:本文首先叙述了双(多)基地雷达的发展历史,并对该雷达在现代防御体系中的优势进行了分析与探讨,最后阐述了典型的双(多)基地雷达系统及其未来的发展趋势。 1引言 双(多)基地雷达主要是相对于比较常见的单基地雷达而言的,它是从雷达收发站配置的角度来命名的。单基地雷达一般是收发共址,即接收站和发射站位于同一个地方,而双(多)基地雷达则是收发异址,其中多基地雷达还具有多个发射站和多个接收站,以离散的形式配置。双(多)基地雷达实际上早在单基地雷达发展前好几年就已经出现了,其原理也早已为人们所应用,但是发展的过程却十分缓慢。这主要是由于天线收发开关和脉冲发射技术的出现,使得单基地雷达在很长一段时间内占据了雷达技术发展的主导地位。但是近年来,随着"四大威胁"即目标隐身技术,综合性电子干扰技术、低空超低空突防技术和反辐射导弹技术的迅猛发展,现代战争对军用雷达的要求变得越来越苛刻,单基地雷达因此也面临着日益严重的生存危机。在海湾战争中,伊拉克的雷达系统为了躲避美军反辐射导弹的攻击,不得不采取了关机的消极措施以求安全。因此,为了对付日趋发展并成熟起来的"四大威胁"的挑战,双(多)基地体制雷达又重新得到了各国的重视。由于双(多)基地雷达使用两个或两个以上的分离基地(其中包括有源和无源基地),因此按照不同的军事要求,它在防御体系中就有多种可能的组合形式。从部置的位置方面来看,可分为地发/地收,空发/地收,地发/空收等几种形式,多基地雷达还具有一发多收,多发多收等形式。 2双(多)基地雷达的发展历史 在双(多)基地雷达正式出现之前,人们实际上就已经开始了这种雷达体制的应用。到三十年代后期,在美、英、法、德、俄等国的早期雷达防御系统中,都出现了这种体制的雷达。当时采用的基本工作原理是使用相距甚远的发射机和接收机。通过测定目标反射信号的多普勒频移和发射机向接收机直接传播的信号之间的差频,从而检测出穿过发射机--接收机基线的目标。1922年,美国海军实验室(NRL)首次应用一部波长为5m的连续波试验装置探测水面船只,由于当时没有有效的隔离方法,只能把收发机分置,这就是一种早期的双基地连续波雷达。 到1932年,NRL已经用这种双基地雷达探测到了相距80km的飞机。同时,美国和法国还布置了双基地的远程雷达防御网,用于探测入侵的飞机。1934年,前苏联也研制出了一种双基地连续波雷达,称为RUS-1,到第二次世界大战德国入侵时,该雷达已在前苏联的远
瑞典MALA探地雷达采集软件快速使用指南 白雪冰V 2012.12版 1、将雷达系统与电脑连接成功后,等大约5~10秒钟,这时候电脑的本地连接提示“连接受限制或无连接”,不 用担心,它不影响雷达系统和电脑的连接,直接点击电脑桌面的采集软件快捷方式进入到采 集软件的界面下,如果这时雷达系统与电脑连接正常的话,窗口界面工具栏的变为红色; 2、点击电脑键盘的“M”键(关掉输入法),进入到的窗口下进行测量任务的设置: ①首先点击,选择你要存储测试数据的路径,建议在采集前,先在电脑硬盘分区里 建立好测试数据的存放文件夹; ②然后点击,如果天线的光纤模块或高频模块在主机的“Slot A”位置,就选择, 如果在“Slot B”,就选择,接着选择该模块的数据通道,因为我们的ProEx主机标准配置是双通道,所以有四个数据通道,“Internal”表示此模块连接天线的电磁波信号自发自收的数据通道,“External”表示此模块的天线接受另外一个模块天线的发射信号,称为它发我收的数据通道,一般来 说我们都是选择“Internal”自发自收的数据通道,选择完毕后一定要在后面的点上“勾”,表示激活此通道; ③选择下拉条里天线,模块上连接的是什么天线就选择什 么天线,如果不知道天线的型号,可以在每个天线的铭牌上查到天线型号,对应选择就是; ④选择测量方式: “Wheel”表示用测距轮触发的方式采集数据(适合于测试现场表面平整的情况), “Time”表示用时间触发的方式采集数据(适合于测试现场表面不平整的情况), “Keyboard”表示用点击电脑的回车键触发采集数据(适合于超前地质预报或野外勘察等深部探测的情况),“Wheel”和“Time”都属于连续测量,建议尽量用“Wheel”测量方式;“Keyboard”属于点测,超前地质预报或地质勘查都必须使用点测; 选择“Time”和“Keyboard”则不需要进行以下⑤和⑥的选择; ⑤如果是选择“Wheel”的测量方式,就要选择里的测量 轮文件: 250MHz、500MHz、800MHz天线的直径150mm的测量轮文件是, 250MHz、500MHz、800MHz 天线的MALA测链的文件是 1200 MHz、1600 MHz、2300 MHz天线的单测量轮的文件是 如果是车载天线测试路面,则需要先校准一个以汽车轮胎为测量轮的文件,然后选择; ⑥接着选择里测距轮的信号来源位置,如果测距轮文件是 150mm的测量轮文件或MALA测链的文件,就选择“Master wheel”,如果测距轮文件是单测量轮的文件,高频模块在主机的“Slot A”位置,就选择“Slot A wheel”,高频模块在主机的“Slot B”位置,就选择“Slot B wheel” 3、点击进入到接收信号参数的设置窗口: ①里显示的是雷达主机当前通道连接的天线的发射和接受天线的偶极子
考古作业过程及探地雷达的应用需求 我公司专业从事文物考古勘探工作,最终目的,在于确定文物局指定的考古勘探现场地下,是否存有文物古迹,是否具有挖掘价值,提供可靠依据,目前主要采取洛阳铲进行考古勘探,我们打算下一步在使用洛阳铲的同时,采用雷达考古勘探技术,并希望贵公司设计制作雷达考古勘探技术的相关软件。使我们在使用该技术时,对于雷达探测的数据进行技术分析,达到考古价值的确认。 现将洛阳铲的工作原理和用法提供如下,以便贵方制作相应软件时参考。 洛阳铲由两个部分组成,U型的金属铲身和一个长柄。铲身一般5至20厘米,长20至40厘米,铲柄的长度则根据使用者的需要而制造。据说制作洛阳铲有制坯、煅烧、热处理、成型、磨刃等20多道工序,因为如果弧度不对,铲进土中无法带出土来。 其实洛阳铲并没有使用非常复杂的科技,利用U型管插入取物也并非新鲜的事情。南方米行查验米粮品质常用的工具就是一个U型或者圆形钢管,插入米袋之后可以带出米袋内的米粒,用以抽检米粮的品质。这无非是利用颗粒受压进入U型管之后相互挤压的张力,使之固定在管内无法移动。 好的洛阳铲要求刃口锋利硬度高,即便铲中石块等物体也不卷刃缺口。铲身要具有一定的韧性,这样才不容易折断。好的洛阳铲插入土内吃土锐利,拔出后褪土快捷。并且能够打穿并提取断砖厚瓦。过去要制作这样的
洛阳铲,都是靠纯手工制造。除了需要使用好的钢材锻造之外,对刃口部分还要特别进行热处理以增加硬度。 洛阳铲局部 对于盗墓贼而言,洛阳铲的主要作用是探孔定位,一个有经验的盗墓贼可以通过洛阳铲中带出的土壤分析出地下是否有墓穴。在一片区域中打上若干个孔,就能了解墓穴大概的位置和面积,从而知道墓穴里宝物的规模和价值。经验丰富的盗墓贼甚至凭洛阳铲碰撞地下发出的声音和手感,便可判断地下的情况,夯实的墙壁和中空的墓室、墓道的感觉是不一样的,探孔经验老到的盗墓贼就能够精确判断出墓穴的结构,并且确定到底从那个位置挖掘进入墓穴最快捷省事。 在盗墓时,贼会先观看地势,如果怀疑该地区有墓穴就会用洛阳铲探路,左右各挖一个孔下探,一般下探3-5米后如感觉坚硬就继续挖,若松软就说明不是墓穴,换个地方再挖。一般挖5米的探洞需要20分钟左右。有经验的盗墓贼会避开墓道,而不断利用探洞寻找墓穴——因为墓道里边
25、(2009)Target Detection in High Clutter using Passive BistaticWiFi Radar Abstract—The rapid rollout of wireless local area networks (WLANs) has provided a ubiquitous source of signal transmissions that may be exploited for surveillance applications using passive bistatic radar (PBR) and passive multistatic radar (PMR) systems. In this study, a series of experiments were conducted to examine the feasibility of using IEEE 802.11 wireless fidelity (WiFi) transmissions for detecting uncooperative targets in high clutter indoor environments. The range and Doppler characteristics of the system were also assessed theoretically from an ambiguity function analysis on WiFi signals having similar transmission parameters. Through-wall detections of personnel targets moving at differing velocities within an indoor environment are presented for the first time. The work demonstrates the feasibility for developing a low cost surveillance device that utilisesWiFi networks as transmitters of opportunity. 25.(2009)在多杂波环境中,使用无源双基地Wifi雷达实现目标识别。摘要-快速部署WLAN技术提供了一种无所不在的信号传输,而这种信号传输也许可以用来实现双基地雷达和多基地雷达的监控应用。在这篇论文中,我们进行了一系列的实验来检验在室内高杂波环境下,使用802.11标准的WiFi传输在检测非组合目标方面的可行性。我们也使用一个与WiFi信号传输具有类似参数的模糊函数对系统的范围
第二讲国内外地质雷达技术发展状况(历史与现状) 探地雷达的历史最早可追溯到20世纪初,1904年,德国人Hulsmeyer首次将电磁波信号应用与地下金属体的探测。1910年Leimback和Lowy以专利形式在1910年的专利,他们用埋设在一组钻孔里的偶极子天线探测地下相对高的导电性质的区域,并正式提出了探地雷达的概念。1926年Hulsenbeck第一个提出应用脉冲技术确定地下结构的思路,指出只要介电常数发生变化就会在交界面会产生电磁波反射,而且该方法易于实现,优于地震方法[1,2]。但由于地下介质具有比空气强得多的电磁衰减特性,加之地下介质情况的多样性,电磁波在地下的传播比空气中复杂的多,使得探地雷达技术和应用受到了很多的限制,初期的探测仅限于对波吸收很弱的冰层厚度(1951,B.O.Steenson,1963,S.Evans)和岩石和煤矿的调查(J.C.Cook)等。随着电子技术的发展,直到70探地雷达技术才重新得到人们的重视,同时美国阿波罗月球表面探测实验的需要,更加速了对探地雷达技术的发展,其发展过程大体可分为三个阶段: 第一阶段,称为试验阶段,从20世纪70年代初期到70年代中期,在此期间美国,日本、加拿大等国都在大力研究,英国、德国也相继发表了论文和研究报告,首家生产和销售商用GPR的公司问世,即Rex Morey和Art Drake成立的美国地球物理测量系统公司(GSSI),日本电器设备大学也研制出小功率的基带脉冲雷达系统。此期间探地雷达的进展主要表现在,人们对地表附近偶极天线的辐射场以及电磁波与各种地质材料相互作用的关系有了深刻的认识,但这些设备的探测精度、地下杂乱回波中目标体的识别、分别率等方面依然存在许多问题。 第二阶段,也称为实用化阶段,从20世纪70年代中后其到80年代,在次期间技术不段发展,美国、日本、加拿大等国相继推出定型的探地雷达系统,在国际市场,主要有美国的地球物理探测设备公司(GSSI)的SIR系统,日本应用地质株式社会(OYO)的YL-R2地质雷达,英国的煤气公司的GP管道公司雷达,在70年代末,加拿大A-Cube公司的Annan和Davis等人于1998年创建了探头及软件公司(SSI),针对SIR系统的局限性以及野外实际探测的具体要求,在系统结构和探测方式上做了重大的改进,大胆采用了微型计算机控制、数字信号处理以及光缆传输高新技术,发展成了EKKO Ground Penetrating Radar 系列产品,简称EKKO GPR系列。瑞典地质公司(SGAB)也生产出RAMAC 钻孔雷达系统,此外,英国ERA公司、SPPSCAN公司,意大利IDS公司、瑞典及丹麦也都在生产和研制各种不同型号的雷达。80年代全数字化的GPR问世,具有划时代的意义,数字化GPR不仅提供了大量数据存储的解决方案,增强了实时和现场数据处理的能力,为数据的深层次后处理带来方便,更重要的是GPR 因此显露出更大的潜力,应用领域得以向纵身拓展。 第三阶段,从上个世纪80年代至今,可称为完善和提高阶段。在此期间,GPR技术突飞猛进,更多的国家开始关注探地雷达技术,出现了很多探地雷达的研究机构,如荷兰的应用科学研究组织和代尔夫大学,法国_德国的Saint-Louis 研究所(ISL),英国的DERA,瑞典的FOA,娜威科技大学和地质研究所,比利时的RMA,南非的开普敦大学,澳大利亚昆士兰大学,美国的林肯实验室和Lawrence Livermore国家实验室以及日本的一些研究机构等等。同时,探地雷达也得到了地球物理和电子工程界的更多关注,对天线的改进、信号的处理、地下目标的成像等方面提出了许多新的见解。GSSI公司在商业上取得了极大的成功,
国外雷达技术新进展概述 朱峥嵘 (南京电子技术研究所,江苏省南京市210039) 摘 要:雷达技术的研发与应用重点仍然集中在有源相控阵雷达、合成孔径雷达方面。有源相控阵雷达技术在机载雷达系统、舰载雷达系统及陆基雷达系统中获得到了广泛的应用。文中指出Ga N (氮化镓)单片微波集成电路功率放大器的可靠性有所提高,有望成为有源相控阵雷达的关键部件,并使有源相控阵雷达的探测距离进一步增加。为满足在无人机上的应用要求,合成孔径雷达的小型化在2009年取得了新的进展。 关键词:有源相控阵雷达;合成孔径雷达;单片微波集成电路中图分类号:T N958 收稿日期:2010205221。 0 引 言 有源相控阵是近年来正在迅速发展的雷达新技 术,它将成为提高雷达在恶劣电磁环境下对付快速、机动及隐身目标的一项关键技术。有源相控阵雷达是集现代相控阵理论、超大规模集成电路、高速计算机、先进固态器件及光电子技术为一体的高新技术产物[122] 。合成孔径雷达是一种高分辨率的二维成像雷达,由于其具有全天候、全天时的优点,特别适于大面积的地表 成像[324] 。 2009年,国外有源相控阵雷达技术与合成孔径雷达技术取得了新进展。 1 有源相控阵雷达技术 有源相控阵雷达具有机械扫描雷达不可比拟的优越性,是雷达技术的主要发展方向。2009年,欧美各国竞相发展和装备有源相控阵雷达。陆基、舰载、机载有源相控阵雷达的研制取得了重大进展,欧洲雷达集团公司研制出可旋转的有源相控阵雷达天线,使该雷达具备了对飞机身后区域的探测能力。美国诺斯罗普?格鲁曼公司开发出敏捷波束机载有源相控阵雷达,不仅能对多个空中目标进行探测,还能进行地面动目标探测,使作战飞机能完成多种作战任务。随着技术的进步,尤其是Ga N (氮化镓)单片微波集成电路在T/R 组件中的应用,有源相控阵雷达的性能将进一步提高。1.1 GaN 单片微波集成电路可靠性提高,有望成为有源相控阵雷达的关键部件 与Ga A s (砷化镓)器件相比,Ga N 器件的功率密度更高(可达40W /mm ),并具有更高的耐高温特性 (工作温度可达600℃以上)。Ga N 高电子迁移率晶 体管可以提供较好的线性功率和效率以及较高的带宽 (高频参数达230GHz )。 美国雷声公司Ga N 芯片进行了长达1000h 的可靠性测试。在长达1000h 的Ga N 单片微波集成电路功率放大器可靠性测试中,器件性能没有降低,这表明此器件向实用化方向迈出了重要的一步。该公司称此Ga N 芯片将广泛用于防空/反导系统的雷达中,它将使有源相控阵雷达的探测距离大大增加,并将使其具有更强的电子攻击能力。1.2 有源相控阵雷达技术首次应用于防空系统的火控雷达 欧洲航空防务航天公司为美、意、德联合开发的ME ADS (中程扩展防空系统)的X 波段MFCR (多功能火控雷达)提供了第一批次5000个T/R 组件及其相关电子设备。这些组件是有源相控阵雷达的关键部件,它揭开了有源相控阵雷达技术应用于防空系统火控雷达的序幕。 X 波段多功能火控雷达是一种固态有源相控阵雷达,在它的主雷达天线上集成了一个敌我识别天线,并可选择性地集成电子支援分系统、GPS 天线和数字处理器。该雷达的天线安装在一台5t 的卡车上,用液体进行冷却,冷却剂从热交换器流向T/R 组件,然后回流至热交换器。该雷达能以“点对点模式”来监视有限方位角范围,也能以“选择模式”进行360°全向扫描。它的最远探测距离达400k m ,具有引导中远程精确制导武器拦截目标的能力,能同时捕捉多个低雷达截面积目标。该雷达的运用将为导弹防御系统提供一种功能更强的火控雷达。 ? 8?第36卷第6期2010年6月 信息化研究 I nf or matizati on Research Vol .36No .6Jun .2010
双基地雷达 Nicholas J.Willis 目录 双基地雷达 (1) 1概念和定义 (2) 2历史 (3) 3坐标系 (5) 4距离关系 (7) 4.1 距离方程 (7) 4.2 卡西尼卵形线 (7) 4.3 工作区 (8) 4.4 距离等值线 (10) 5面积关系 (10) 5.1 定位 (10) 5.2 覆盖范围 (11) 5.3 杂波单元面积 (12) 6多普勒关系 (15) 6.1 目标多普勒 (15) 6.2 多普勒等值线 (15) 7目标截面积 (16) 7.1 伪单基地的RCS区 (16) 7.2 双基地RCS区 (18) 7.3 双基地RCS的闪烁衰减区 (18) 7.4 前向散射RCS区 (18) 8杂波 (19) 8.1 “平面内”地杂波散射系数 (21) 8.2 “平面内”海杂波散射系数 (24) 8.3 “平面外”散射系数 (25) 9特殊技术、问题和要求 (25) 9.1 脉冲追赶 (25) 9.2 波束同步扫描 (26) 9.3 副瓣杂波 (27) 1
9.4 时间同步 (29) 9.5 相位同步和相位稳定性 (29) 参考资料 (30) 1 概念和定义 双基地雷达采用两个相距颇远的基地,其中一个放置发射机,另一个放置相应的接收机。其目标检测与单基地雷达类似,即发射机照射目标、接收机检测和处理目标回波。目标定位也与单基地雷达类似,但更复杂:为求解发射机-目标-接收机三角形(双基地三角形),需要信号传播总时间、接收机的正交角测量及对发射机位置的一些估计。由于站址分开,因此可能再加上副瓣对消,对直达路径发射信号提供足够的空间隔离度。双基地雷达常采用CW波形。 当分开的发射天线和接收天线处于同一基地(如通常的CW雷达)时,由于这种雷达具有单基地雷达的特征,所以不用双基地这一术语来描述这样的系统。在某些特定的场合下,尽管雷达的收发天线放在不同的基地,但仍被认为是单基地工作模式。例如,超视距(OTH)雷达的站间距可达100km或更大,但相对于几千公里外的目标而言[1][2],这一距离很小,因此雷达工作仍具有单基地的特征。 若系统使用两个或多个具有公共覆盖空域的接收基地,并且每个基地的目标数据在一个中心站融合,则这种系统被称为多基地雷达。由稀疏分布阵列、随机分布阵列、畸变分布阵列和分布阵列构成的雷达[3]~[6]、干涉仪雷达[7]~[10]、无线电摄影[11][12]和多基地测量系统[13][14]有时被认为是多基地雷达的分支。它们通常是将来自每个基地的数据用相参的方式进行融合以形成大的接收孔径。多部发射机也能用于上述任何一种系统,可置于单独的基地或和接收机放在同一个基地。雷达网中三部测距单基地雷达组网有时被称为三边测量雷达。三边测量的概念也用在多基地雷达中,它借助到达时间差(TDOA)或差分多普勒技术来测量目标位置。 上述双基地雷达的定义是广义的和习惯采用的[1][15][16],但并不意味着在文献中是统一的。资料中使用的术语还有准双基地、准单基地、伪单基地、三基地、多基地、真多基地、多双基地和组网式双基地等[17]~[20]。它们通常是上述广义双基地定义的特殊情况。 无源接收系统或电子支援措施(ESM)系统常使用两个或更多个接收基地,目的主要是为了检测、识别和定位,诸如单基地的发射机,因而称其为发射机定位器。融合每个基地的测量角度(如三角形测量),测量多基地之间的TDOA和/或差分多普勒可定位目标。这些系统的设计目的不是为了探测和处理发射机照射到目标的回波,但是它们能够按双基地和多基地雷达方式工作,识别和定位合适的发射机,以确定雷达的工作模式。总之,虽然这些系统的许多要求和特征都与多基地雷达相同,但它们不属于雷达范畴,所以不在这里讨论。 2
雷达技术的发展历程及其在现代战争下的发展趋势研究 摘要:文章简要介绍了雷达系统和技术的发展历程,分析了雷达系统与技术发展的特点,提出了现代战争下雷达技术发展展望。 关键词:雷达技术相控阵合成孔径发展历程发展趋势 引言 自从雷达诞生至今,在70 多年的发展历程中,随着科技的不断发展、需求的不断变化,出现了多种体制的新功能雷达,雷达的技术性能、体积和重量、可靠性、维修性、抗恶劣环境的生存能力等也发生了天翻地覆的变化。特别是其在现代战争中的广泛应用,使得对雷达技术的研究具有了重要的意义。 一、雷达系统与技术的发展历程 1.20 世纪30 年代及以前 19 世纪后期,物理学家麦克斯韦、法拉第和安培等人,预言并用数学公式描述了移动电流产生的电磁波的存在情况。1935 年英国和美国科学家第一次研制出能够探测空中飞机的实用米波雷达,至此宣告了雷达的诞生。1936 年美国海军研究实验室研制了T / R (收发)开关,可使雷达系统的接收和发射分系统共用一副天线,大大简化了雷达系统结构。1939 年英国科学家发明了大功率磁控管,克服了甚高频雷达波束和频带窄的缺点,使实用雷达步入了微波频段。 2.20 世纪40 年代 20 世纪40 年代美国辐射研究室把微波新技术应用于军用机载、陆基和舰载雷达取得成功,其代表产品是SCR -270 机载雷达、SCR -584 炮瞄雷达和AN / APQ-机载轰炸瞄准相控阵雷达。20 世纪40 年代主要的雷达技术有动目标显示技术、中继技术以及单脉冲跟踪技术理论的提出。动目标显示技术应用于各型对空警戒雷达,后来应用于着陆引导、岸防等型雷达,其优势是能有效抑制地海杂波,抑制大山、建筑物、风雨雪等静止和慢动目标的干扰能将机载情报传送到地面观测站,能有效加强地空之间的信息联系。 3.20 世纪50 年代 20 世纪50 年代是雷达理论发展的鼎盛时期,雷达设计从基于工程经验阶段,进人了以理论为基础,结合实践经验的高级阶段。50 年代产生的主要理论有匹配滤波器概念、统计检测理论、模糊图理论和动目标显示理论等。各种新技术的应用,出现了诸如脉冲多普勒雷达、合成孔径雷达等新休制雷达。 4.20世纪60年代 20 世纪60 年代雷达系统发展的主要标志是数字处理技术革命和相控阵雷达的应运而生。为了探测洲际弹道导弹,为防空系统提供预测情报,产生了相控阵雷达体制。新一代雷达发展方向是全固态电扫相控阵多功能雷达。雷达信号和数据处理的数字化革命、半导体元件、大规模和超大规模集成电路的应用,使雷达技术的发展日臻完善并达到比较高的水平。