
异步电机的数学模型是一个高阶、非线性、强耦合的多变量系统[1]。在研究异步电机的多变量数学模型时,常作如下假设:
(1)三相绕组在空间对称互差ο120,磁势在空间按正弦分布; (2)忽略铁芯损耗;
(3)不考虑磁路饱和,即认为各绕组间互感和自感都是线性的; (4)不考虑温度和频率变化对电机参数的影响。
异步电机在两相静止坐标系上的数学模型:
仿真的基本思想是利用物理的或数学的模型来类比模仿现实过程,以寻求过程和规律。在实际过程中,系统可能太复杂,无法求得其解析解,可以通过仿真求得其数值解。计算机仿真是利用计算机对所研究系统的结构、功能和行为以及参与系统控制的主动者——人的思维过程和行为,进行动态性的比较和模仿,利用建立的仿真模型对系统进行研究和分析,并可将系统过程演示出来。
系统仿真软件MATLAB 不但在数值计算和符号计算方面具有强大的功能,而且在计算结果的分析和数据可视化方面有着其他类似软件难以匹敌的优势。界面友好,编程效率高,扩展性强。MATLAB 提供的SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。SIMULINK 的目的是让用户能够把更多的精力投入到模型设计本身。它提供了一些基本的模块,这些模块放在浏览器里面,用户可以随时调用。当模型构造之后,用户可以进行仿真,等待结果,或者改变参数,再进行仿真。异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,其动态和静态特性都相当复杂。以下将介绍用SIMULINK 如何来建立三相异步电机的计算机仿真模型,为以后的系统仿真做好准备。
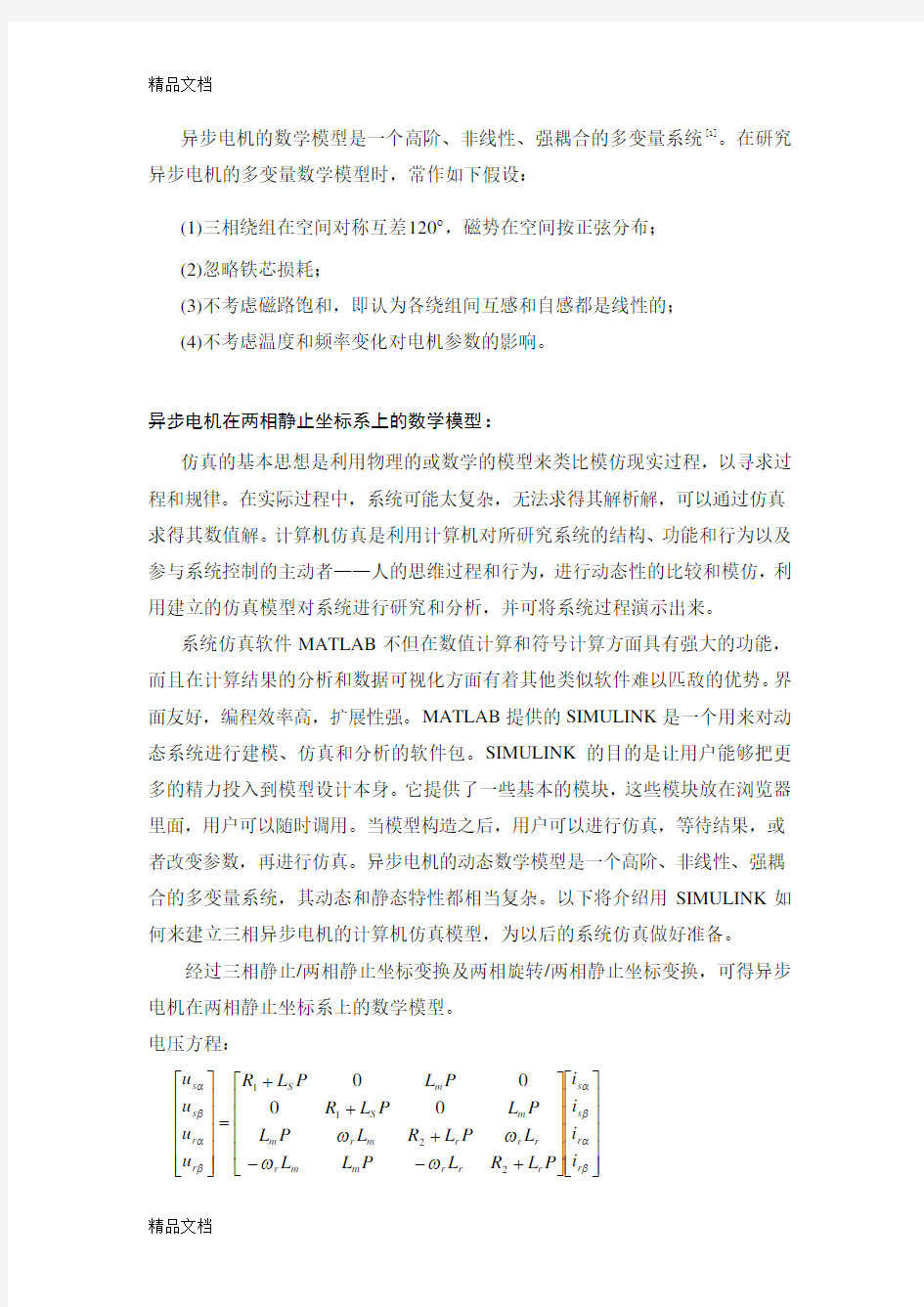
经过三相静止/两相静止坐标变换及两相旋转/两相静止坐标变换,可得异步电机在两相静止坐标系上的数学模型。 电压方程:
??????
?
???????????????????+--+++=??????????????βαβαβαβαωωωωr r s s r r r m m r r r r m r m m S m S r r s s i i i i P L R L P L L L P L R L P L P L P L R P L P L R u u u u 22110000
磁链方程:
??????
????????????????????=??????????????βαβαβαβαψψψψr r s s r m
r m m s
m s r r s s i i i i L L L L L L L L 0
0000000
转矩方程:
[
]
)(0110βααββαβαr s r s m p r r s s m p e i i i i L n i i i i L n T -=??
?
?????
?????-?= 转速方程:
L e r
p T T dt d n J -=ω
式中: m m L L 12
3
=
—οβα、、静止坐标系上定子与转子绕组间的互感,m s s L L L 123
+=σ—οβα、、静止坐标系上两相定子绕组的自感,
m r r L L L 123
+=σ—οβα、、静止坐标系上两相转子绕组的自感,1R 、2R —定、转
子电阻,L T 为负载阻转矩,J 为机组的转动惯量,p n 极对数,r ω为电机转子的旋转角速度。
在进行交流传动控制系统仿真时,第一步必须建立异步电动机的仿真模型。为了使仿真结果尽可能地接近异步电动机的实际运行状况,仿真模型应该与异步电动机的原始模型尽量保持一致,在这种情况下,所得到的仿真结果才具有现实指导意义。在这里,以两相静止οβα、、坐标系中的数学模型作为建立仿真模型的依据,该数学模型是在变换前后功率保持不变的约束条件下,经过三相静止到两相静止坐标变换得到的,不需要其他假设条件。
根据上式所列的电压、磁链、转矩和转速方程,就可得到异步电机在两相静止坐标系中的仿真模型,如图1所示。
图1 异步电机在两相静止坐标系下的模型
在图1中,/,/Us is Us is ααββ模块实现的功能就是异步电机在两相静止坐标系上的电压方程,/,/ir ir ir ir βααβ即为磁链方程。
下面,我们来分析/,/Us is Us is ααββ模块的实现方法,以/Us is αα为例,采用电压方程的第一列:
1()s s s m r u R L p i L pi ααα=++根据这一公式,可建立模块如图2:
isa1
1Integrator 1
1
s Gain 5
R1
Gain 4
1/ls Gain
lm usa
2pira
1
图2 /Us is αα模块
同样的方法,可建立/Us is ββ模型,求出s i β。
根据电机的转矩方程,可建立电机模型的转矩模块,即图中的i-Te 模块,然后根据转速方程求出转子的旋转角速度r ω。下面我们建立电机的磁链方程,求
2.1同步发电机数学模型及运行特性 本节主要阐述同步发电机稳态数学模型及运行特性:包括向量图、等值电路与功率方程以及功角特性。 2.1.1 同步发电机稳态数学模型 理想电机假设: 1)电机铁心部分的导磁系数为常数; 2)电机定子三相绕组完全对称,在空间上互差120度,转子在结构上对本身的直轴和交轴完全对称; 3)定子电流在空气隙中产生正弦分布的磁势,转子绕组和定子绕组间的互感磁通也在空气隙中按正弦规率分布; 4)定子及转子的槽和通风沟不影响定子及转子的电感,即认为电机的定子及转子具有光滑的表面。 同步电动机是一种交流电机,主要做发电机用,也可做电动机用,一般用于功率较大,转速不要求调节的生产机械,例如大型水泵,空压机和矿井通风机等。近年由于永磁材料和电子技术的发展,微型同步电机得到越来越广泛的应用。同步电动机的特点之一是稳定运行时的转速n与定子电流的频率f1之间有严格不变的关系,即同步电动机的转速n与旋转磁场的转速n0相同。“同步”之名由此而来。 同步发电机是电力系统中的电源,它的稳态特性与暂态行为在电力系统中具有支配地位。虽然在电机学中已经学过同步电机,但那时侧重于基本电磁关系,而现在则从系统运行的角度审视发电机组。 1.同步发电机的相量图 设发电机以滞后功率因数运行,三相同步发电机正常运行时,定子某一相空载电势Eq,输出电压或端电压U和输出电流I间的相位关系如图2-1所示。δ是Eq领先U的角度,称为功角,是功率因数角,即U与I的相位差, Eq与q轴(横轴或交轴)重合,d为纵轴或直轴。U和I的d、q分量为: 图 2-1电势电压相量图 电机学课程中已经讨论过,端电压和电流的分量与Eq间的关系为: (2-3)
电动机功率计算 80146
旋转装置的功率如何计算(转自中国机械CAD论坛) 旋转装置的功率如何计算(已解决) 如图,施加在转动链轮上的功率怎么计算,我算出来好小,肯定不对。 请费点力气帮我看看,谢谢! 回楼上的,工件不运动,就原地打转。 条件不充足啊,工件从静止到同速旋转要多长时间啊?5000Kg工件是固体吗?和其他物体在旋转过程中有接触吗? 我网上找了些公式,这么算不知道对不对—— 扭矩=工件重量X链轮半径X推力球轴承摩擦系数 X9.8=4500X0.115X0.0013X9.8=6.6 Nm 输入功率=扭矩X旋转速度/9549=6.6*4/9549=0.0027 kW 才2.7瓦???在这里,主要克服的是,启动转动惯性力 惯性力矩=转动惯量x角加速度,(M=Jβ), J=J1+J2+J3,J=mr^2/2 ,这里你的轴,链轮,还有下面的重物分别计算,也许你的重物不是圆柱型,简化力学模型,就当他是圆的好了 β=△w/△t, 物体是从0转速开始启动到4r/min的,w=2πn/60, △t是你的意愿,假设10秒,5秒的,这就好了 M=9549XN/n,M是你上面算出来的,N是功率,n是转速 最后再乘以减速器还有轴承的系数就好了, 如果按xushishujun给的公式计算的话!(假设t=1s) 扭矩M=25.5N.m
功率N=11W 这么小的扭矩和功率就能启动5000KG的重物旋转吗? 扭矩M=25.5N.m时,如果电机输出转速为940r/min,,电机功率为2.51kw 一台天车吊起10t重物后,你用手将重物旋转一下可能比较轻松,但要旋转快一点就费劲多了。 这就是转动惯量与角速度的相互作用的关系。 转动惯量=5000*1*1/2=2500 (kg*m^2) 角加速度=2*3.14*4/60/1=0.42 (rad/s^2) 惯性转矩=2500*0.42=1047 N*m 功率=1047*4/9549=0.44 kw 不知道算的对不,貌似也很小,可能不对? 我觉得先算扭矩,保证扭矩后再根据物件需要的运动速度,计算功率。还有克服摩擦的功率。 是应该按惯性矩去算,不过采用链式传动会对减速机冲击很大不是很好的选择多谢指点,前些时候有人提起过,但没说到冲击的点子上,看来是要改成齿轮的合适些。 可能应该是这样了,这个数值比较合理了,我是参照电动葫芦的行走电机的,呵呵,惭愧~ 各位好,我把我的计算过程在这里写一下吧 J=mr^2/2=(5000x1^2)/2=2500kgm^2 β=△w/△t=(2πn/60)/t=(2x3.14x4/60)/1=0.42rad/s^2 M'=Jβ=2500X0.42=1050Nm
同步电机数学模型的建立和仿真 :包邻淋 专业:控制工程 学号:1402094
摘要 (3) 1同步电机数学模型的建立 (4) 1.1模型的导出思路 (4) 1.2变量置换用的表达式 (5) 1.4电机实用模型 (6) 1.5电机实用模型的状态空间表达式 (8) 1.6电机模型参数的确定 (10) 2 同步电机数学模型的仿真 (13) 2.1同步发电机仿真模型 (13) 2.2不同阶次模型的仿真分析 (14) 参考文献 (17)
摘要 一般发电机存在临诸多问题,建立精确地描述同步发电机的数学模型是十分必要的[1]。电力系统数字仿真因具有不受原型系统规模和结构复杂性限制,能保证被研究系统的安全性,且具有良好的经济性、方便性等优点。 常用的同步发电机数学模型由同步发电机电路方程及转子运动方程两部分组成。同步发电机电路方程又分为基本方程和导出模型两类[4]。对于不同的假设条件,同步发电机模型可作不同程度的简化,因此同步发电机的导出模型也有不同的形式。同一假设条件下,不同的同步发电机数学模型,其主要区别在于电机的转子绕组数,有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,则称之为转子7阶模型[5]。如果转子绕组数减少,则发电机方程组的阶数也相应减少。 本文通过MATLAB/simulink进行仿真计算,比较采用不同的同步发电机模型时,对系统的稳定性分析的影响。在此基础上提出在不同情况下进行电力系统仿真计算选取同步发电机数学模型的方法。
1同步电机数学模型的建立 1.1模型的导出思路 由于定转子间的相对运动,基于空间静止不动的三相坐标系所建立的原始方程,磁链方程式中会出现变系数,这对方程组的求解和模型的建立造成了很大的困难。现在通用的方法是对原始方程做d q变换(又称为派克变换),将原方程从a b c三相静止不动坐标系变为与转子相对静止的d q坐标系。 基本方程中有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,若设,则原方程为5阶,若转子运动方程为,;所含变量为,。。在化为实用模型时 和保留,用取代,再用5个磁链方程消去3个转子电流,以及2个定子磁链,而 则用实用变量代替。 经过上述思路导出的实用模型,除了以及引入的等效实用变量之外方程中系数都是同步电机技术参数中的电抗和时间
电机数学模型 以二相导通星形三相六状态为例,分析BLDC的数学模型及电磁转矩等特性。为了便于分析,假定: a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b)忽略齿槽、换相过程和电枢反应等的影响; c)电枢绕组在定子内表面均匀连续分布; d)磁路不饱和,不计涡流和磁滞损耗。 则三相绕组的电压平衡方程可表示为: 错误!未找到引用源。(1) 式中:错误!未找到引用源。为定子相绕组电压(V);错误!未找到引用源。为定子相绕组电流(A);错误!未找到引用源。为定子相绕组电动势(V);L为每相绕组的自感(H);M为每相绕组间的互感(H);p为微分算子p=d/dt。 三相绕组为星形连接,且没有中线,则有 错误!未找到引用源。(2) 错误!未找到引用源。(3) 得到最终电压方程: 错误!未找到引用源。(4) e c c 图.无刷直流电机的等效电路 无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比 错误!未找到引用源。(5) 所以控制逆变器输出方波电流的幅值即可以控制BLDC电机的转矩。为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°
电角度,两者应严格同步。由于在任何时刻,定子只有两相导通,则:电磁功率可表示为: 错误!未找到引用源。(6) 电磁转矩又可表示为: 错误!未找到引用源。(7) 无刷直流电机的运动方程为: 错误!未找到引用源。(8) 其中错误!未找到引用源。为电磁转矩;错误!未找到引用源。为负载转矩;B为阻尼系数;错误!未找到引用源。为电机机械转速;J为电机的转动惯量。 传递函数: 无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示: 图2.无刷直流电机动态结构图 由无刷直流电机动态结构图可求得其传递函数为: 式中: K1为电动势传递系数,错误!未找到引用源。,Ce 为电动势系数; K2为转矩传递函数,错误!未找到引用源。,R 为电动机内阻,Ct 为转矩系数;T m为电机时间常数,错误!未找到引用源。,G 为转子重量,D 为转子直径。基于MATLAB的BLDC系统模型的建立 在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,
电机电流计算: 对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压 对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相 B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流 当电机星接时:线电流=相电流;线电压=根号3相电压。三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏 当电机角接时:线电流=根号3相电流;线电压=相电压。绕组是直接接380的,导线的电流是两个绕组电流的矢量之和 功率计算公式 p=根号三UI乘功率因数是对的 用一个钳式电流表卡在A B C任意一个线上测到都是线电流 极对数与扭矩的关系 n=60f/p n: 电机转速 60: 60秒 f: 我国电流采用50Hz p: 电机极对数 1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分在输出功率不变的情况下,电机的极对数越多,电机的转速就越低,但它的扭矩就越大。所以在选用电机时,考虑负载需要多大的起动扭距。 异步电机的转速n=(60f/p)×(1-s),主要与频率和极数有关。 直流电机的转速与极数无关,他的转速主要与电枢的电压、磁通量、及电机的结构有关。n=(电机电压-电枢电流*电枢电阻)/(电机结构常数*磁通)。 扭矩公式 T=9550*P输出功率/N转速 导线电阻计算公式: 铜线的电阻率ρ=0.0172, R=ρ×L/S (L=导线长度,单位:米,S=导线截面,单位:m㎡) 磁通量的计算公式: B为磁感应强度,S为面积。已知高斯磁场定律为:Φ=BS 磁场强度的计算公式:H = N × I / Le 式中:H为磁场强度,单位为A/m;N为励磁线圈的匝数;I为励磁电流(测量值),单位位A;Le为测试样品的有效磁路长度,单位为m。 磁感应强度计算公式:B = Φ/ (N × Ae)B=F/IL u磁导率 pi=3.14 B=uI/2R 式中:B为磁感应强度,单位为Wb/m^2;Φ为感应磁通(测量值),单位为Wb;N为感应线圈的匝数;Ae为测试样品的有效截面积,单位为m^2。 感应电动势 1)E=nΔΦ/Δt(普适公式){法拉第电磁感应定律,E:感应电动势(V),n:感应线圈匝数,ΔΦ/Δt:磁通量的变化率} 磁通量变化率=磁通量变化量/时间磁通量变化量=变化后的磁通量-变化前的磁通量 2)E=BLV垂(切割磁感线运动){L:有效长度(m)} 3)Em=nBSω(交流发电机最大的感应电动势){Em:感应电动势峰值} 4)E=BL2ω/2(导体一端固定以ω旋转切割){ω:角速度(rad/s),V:速度(m/s)}
异步电机的数学模型是一个高阶、非线性、强耦合的多变量系统[1]。在研究异步电机的多变量数学模型时,常作如下假设: (1)三相绕组在空间对称互差ο120,磁势在空间按正弦分布; (2)忽略铁芯损耗; (3)不考虑磁路饱和,即认为各绕组间互感和自感都是线性的; (4)不考虑温度和频率变化对电机参数的影响。 异步电机在两相静止坐标系上的数学模型: 仿真的基本思想是利用物理的或数学的模型来类比模仿现实过程,以寻求过程和规律。在实际过程中,系统可能太复杂,无法求得其解析解,可以通过仿真求得其数值解。计算机仿真是利用计算机对所研究系统的结构、功能和行为以及参与系统控制的主动者——人的思维过程和行为,进行动态性的比较和模仿,利用建立的仿真模型对系统进行研究和分析,并可将系统过程演示出来。 系统仿真软件MATLAB 不但在数值计算和符号计算方面具有强大的功能,而且在计算结果的分析和数据可视化方面有着其他类似软件难以匹敌的优势。界面友好,编程效率高,扩展性强。MATLAB 提供的SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。SIMULINK 的目的是让用户能够把更多的精力投入到模型设计本身。它提供了一些基本的模块,这些模块放在浏览器里面,用户可以随时调用。当模型构造之后,用户可以进行仿真,等待结果,或者改变参数,再进行仿真。异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,其动态和静态特性都相当复杂。以下将介绍用SIMULINK 如何来建立三相异步电机的计算机仿真模型,为以后的系统仿真做好准备。 经过三相静止/两相静止坐标变换及两相旋转/两相静止坐标变换,可得异步电机在两相静止坐标系上的数学模型。 电压方程: ?????? ? ???????????????????+--+++=??????????????βαβαβαβαωωωωr r s s r r r m m r r r r m r m m S m S r r s s i i i i P L R L P L L L P L R L P L P L P L R P L P L R u u u u 22110000
第27卷第4期2004年8月 鞍山科技大学学报 Jou rnal of A n shan U n iversity of Science and T echno logy V o l.27N o.4 A ug.,2004无刷双馈电机的数学模型和 基于Si m u link4的仿真 陈海朋1,李 岩1,韩 伟2 (1.鞍山科技大学电子与信息工程学院,辽宁鞍山 114044;2.鞍山供电公司,辽宁鞍山 114001) 摘 要:无刷双馈电机是一种在许多方面都有着很好应用前景的新型电机.本文重新推导了无刷双馈电机的数学模型,并在M A TLAB S I M UL I N K环境下建立了仿真模型,为进一步构成控制系统,进行系统分析与设计奠定了基础. 关键词:级联式双馈电机;数学模型;仿真 中图分类号:TM301.2 文献标识码:A 文章编号:167224410(2004)0420273205 双馈电机又称异步化同步电机[1],与变频器一起可以实现机电系统的柔性连接,对提高电力系统的稳定性有重要意义.双馈电机可以在各种负荷下实现大范围的无级调速,将其用于风机、泵类负载时,具有显著的节能效果,同时也大大降低了所需变频器的功率.在可调速的电气转动方式中,这种调速方式的效率很高[2].特别是无触点双馈电机具有良好的应用前景. 目前国内外对无刷双馈电机的研究已从对电机结构的改进阶段发展到建立比较准确的实用模型阶段.可以看出,现有的无刷双馈电机的数学模型大多建立在d q0坐标轴系基础之上[3],并且在把电机内的电量折算到d q0坐标轴系时,往往取其综合矢量方向为q轴方向,这与当前教材不一致.而且,以往对无刷双馈电机的仿真程序大部分是用C或FO R TAN语言编写,这些语言对编制和调试矩阵运算、微分方程解法等程序很不方便. 针对上述情况,本文重新推导了无刷双馈电机的数学模型.并且以该数学模型为基础,利用M A TALB S I M U L I N K中的S函数和电源模块集(Pow er system b lock set),建立了无刷双馈电机的仿真模型,实现了该仿真模型与电源模块之间的耦合. 1 无刷双馈电机与级联式双馈电机的工作原理 级联式双馈电机(CD FM)与无刷双馈电机(BD FM)的结构相似,都相当于2台绕线式异步电机串级而成,具有2套分离的定子绕组,2套转子绕组.只是无刷双馈电机相当于2台绕线式异步电机同轴串级而成,并且2套转子绕组反相序联接,其结构如图1所示. 为分析方便,假定无刷双馈电机由极对数分别为p A,p B的绕线式异步电机A和B组成.电机A的定子直接与三相工频电网相连,电机内部磁场相互作用关系如图2所示.图中f A,f B分别为两定子绕组的供电频率,H z;f r A,f r B分别为两转子绕组感应电势的频率,H z;n为转子转速,r m in. 稳态运行时,无刷双馈电机的转速为 n=60(f A-f B) (p A+p B)(1) 收稿日期:2004203211. 作者简介:陈海朋(1978-),男,黑龙江兰西人,2001级研究生.
电机的耗电量的公式计 算 -CAL-FENGHAI.-(YICAI)-Company One1
电机的耗电量以以下的公式计算:耗电度数=(根号3)X 电机线电压 X 电机电流 X 功率因数) X 用电小时数/1000 电机的额定功率是750W,采用星形接法,接在三相380伏的电源上,用变频器监测电流是1.1A;我又用钳形电流表进行测量,测得每相电流为1.1A,这就说明变频器和钳形电流表测得的电流是一致的。因为电机是星形接法,线电压是相电压的倍,线电流等于相电流,电机实际消耗的功率:380×× = 724 W,这样电机实际消耗的功率就接近于电机的额定功率。如果电机是三角形接法,线电压等于相电压,线电流是相电流的倍,电机实际消耗功率的计算是一样的。 这就说明:三相交流电机实际消耗的功率就等于线电压 × 线电流。 电机额定功率为450kW,功率因数为,电机效率为%,现运行中发现电流为40A,电压为6000V,那么怎么正确计算电机的各项功率以及电机有功及无功的损耗 高压电机一般为三相电机. 视在功率=×6000×40= 有功功率 =×6000×40×= 无功功率=(视在功率平方减有功功率平方开根二次方) 有功损耗=有功功率×%)=×= 无功损耗=无功功率×%)=×= 注明:
电机不运行于额定状况,效率及功率因数是有偏差的,上述数值只能为理论值,可能与实际会有点小偏差。 因为铭牌上所标的额定功率是电机能输出的机械功率,所以不等于电压和电流的乘积就象一个10KW的电动机,他能输出的机械功率是10KW,但它所消耗的电功率要大于10KW,三相电动机的功率计算公式:P=*U*I*cosΦ . 三相异步电动机功率因数 异步电动机的功率因数不是一个定数,它与制造的质量有关,还与负载率的大小有关。为了节约电能,国家强制要求电机产品提高功率因数,由原来的到提高到了现在的到,但负载率就是使用者掌握的,就不是统一的了。过去在电机电流计算中功率因数常常取,现在也常常是取。 2.实际功率和额定功率 三相异步电动机的功率计算公式就是*线电压*线电流*功率因数。那你的实际电压是395V,实际电流是140A,那么它的实际功率就是: *395*140*=81kw 如果是空载,功率因数还要小,功率也就还要少,消耗电能也就少。
电机功率计算公式 Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT
一,电机额定功率和实际功率的区别 是指在此数据下电机为最佳工作状态。 额定电压是固定的,允许偏差10%。 电机的实际功率和实际电流是随着所拖动负载的大小而不同; 拖动的负载大,则实际功率和实际电流大; 拖动的负载小,则实际功率和实际电流小。 实际功率和实际电流大于额定功率和额定电流,电机会过热烧毁; 实际功率和实际电流小于额定功率和额定电流,则造成材料浪费。 它们的关系是: 额定功率=额定电流IN*额定电压UN*根3*功率因数 实际功率=实际电流IN*实际电压UN*根3*功率因数 二,280KW水泵电机额定电流和启动电流的计算公式和相应规范出处 (1)280KW电机的电流与极数、功率因素有关一般公式是:电流=((280KW/380V)0.8.5机的电流怎么算 答:⑴当电机为单相电机时由P=UIcosθ得:I=P/Ucosθ,其中P为电机的额定功率,U为额定电压,cosθ为功率因数; ⑵当电机为三相电机时由P=√3×UIcosθ得:I=P/(√3×Ucosθ),其中P为电机的额定功率,U为额定电压,cosθ为功率因数。 功率因数
在交流电路中,电压与电流之间的相位差(Φ)的余弦叫做功率因数,用符号 cosΦ表示,在数值上,功率因数是有功功率和视在功率的比值,即cosΦ=P/S 功率因数的大小与电路的负荷性质有关,如白炽灯泡、电阻炉等电阻负荷的功率因数为1,一般具有电感或电容性负载的电路功率因数都小于1。功率因数是电力系统的一个重要的技术数据。功率因数是衡量电气设备效率高低的一个系数。功率因数低,说明电路用于交变磁场转换的无功功率大,从而降低了设备的利用率,增加了线路供电损失。所以,供电部门对用电单位的功率因数有一定的标准要求。 (1) 最基本分析:拿设备作举例。例如:设备功率为100个单位,也就是说,有100个单位的功率输送到设备中。然而,因大部分电器系统存在固有的无功损耗,只能使用70个单位的功率。很不幸,虽然仅仅使用70个单位,却要付100个单位的费用。在这个例子中,功率因数是 (如果大部分设备的功率因数 小于时,将被罚款),这种无功损耗主要存在于电机设备中(如鼓风机、抽水机、压缩机等),又叫感性负载。功率因数是马达效能的计量标准。 (2) 基本分析:每种电机系统均消耗两大功率,分别是真正的有用功(叫千瓦)及电抗性的无用功。功率因数是有用功与总功率间的比率。功率因数越高,有用功与总功率间的比率便越高,系统运行则更有效率。 (3) 高级分析:在感性负载电路中,电流波形峰值在电压波形峰值之后发生。两种波形峰值的分隔可用功率因数表示。功率因数越低,两个波形峰值则分隔越大。保尔金能使两个峰值重新接近在一起,从而提高系统运行效率。 对于功率因数改善
电机: 电机(英文:Electric machinery,俗称“马达”)是指依据电磁感应定律实现电能转换或传递的一种电磁装置。 电机在电路中是用字母M(旧标准用D)表示,它的主要作用是产生驱动转矩,作为用电器或各种机械的动力源,发电机在电路中用字母G表示,它的主要作用是利用机械能转化为电能。 电机功率计算公式: 电机功率算公式: 1、三相:P=1.732×UI×cosφU是线电压,某相电流。 当电机电压是380伏时,可以用以下的公式计算: 电机功率=根号3*0。38*电流*0。8 将1千瓦代入上式,可以得到电流等于1.9A。 2、P=F×v÷60÷η 公式中P功率(kW),F牵引力(kN),v速度(m/min),η传动机械的效率,一般0.8左右。 本例中如果取η=0.8,μ=0.1,k=1.25,则: P=F×v÷60÷η×k=0.1×400×60÷60÷0.8×1.25=62.5 kW 电机电流计算公式: 单相电机电流计算公式 I=P/(U*cosfi) 例如:单相电压U=0.22KV,cosfi=0.8则I=P/(0.22*0.8)=5.68P 三相电机电流计算公式
I=P/(1.732*U*cosfi) 例如:三相电压U=0.38KV,cosfi=0.8则 I=P/(1.732*0.38*0.8)=1.9P 根据经验220V:KW/6A、380V:KW/2A、660V:KW/1.2A、3000V:4KW/1A 功率包括电功率、机械功率。电功率又包括直流电功率、交流电功率和射频功率;交流功率又包括正弦电路功率和非正弦电路功率;机械功率又包括线位移功率和角位移功率,角位移功率常见于电机输出功率;电功率还可分为瞬时功率、平均功率(有功功率)、无功功率、视在功率。在电学中,不加特殊声明时,功率均指有功功率。在非正弦电路中,无功功率又可分为位移无功功率,畸变无功功率,两者的方和根称为广义无功功率。 功率可分为电功率,力的功率等。故计算公式也有所不同。 功率功率电功率计算公式:P=W/t=UI; 在纯电阻电路中,根据欧姆定律U=IR代入P=UI中还可以得到:P=I2R=(U2)/R 在动力学中:功率计算公式:1.P=W/t(平均功率)2.P=FV;P=Fvcosα(瞬时功率) 因为W=F(F力)×S(s位移)(功的定义式),所以求功率的公式也可推导出P=F·v:P=W/t=F*S/t=F*V(此公式适用于物体做匀速直线运动)
电力电子与交流传动系统仿真 第6章交流电机的数学模型及参数关系 (1) 6.1 三相异步电动机的数学模型 (2) 6.2 三相同步电动机的数学模型 (5) 6.3 永磁同步电动机的数学模型 (8) 6.4 无刷直流电动机的数学模型 (14) 6.5 交流电机的参数计算 (17) 6.5.1 笼型绕组的多回路模型 (17) 6.5.2 电感参数的解析计算 (19) 6.5.3 磁路饱和问题的处理 (25)
第6章 交流电机的数学模型及参数关系 在第5章坐标变换与电机统一理论的基础上,本章针对现代交流传动控制系统中常用的三相异步电动机、三相同步电动机、永磁同步电动机和无刷直流电动机进行数学建模和参数分析,为后续的系统仿真奠定基础。下面首先阐述电机建模的三个共性问题。 1. 正方向的规定 交流电机的数学模型由电机绕组的电压方程(包括磁链方程)和电机转子的运动方程(包括转矩方程)组成。由于是对电力传动系统进行分析,考虑的都是电动机,所以采用电动机惯例列写电压方程和运动方程,即在电磁系统方面,以外加电压u 为正,线圈流入正向电流i 时,产生正值磁链ψ;同时,在机械系统方面,电机的电磁转矩em T 为驱动性质,与转子转速Ω同向,而外加负载转矩L T 为制动性质,与转子转速Ω反向,如图6-1所示。 u R L 图6-1 正方向的规定 2. 基本假设 交流电机的定子一般采用三相对称绕组,为简化问题,同时又不影响数学模型的精度,常作如下假设: 1) 定子内壁、转子外表面光滑,不计齿槽效应。 2) 气隙磁密按正弦规律分布,不计空间高次谐波。 3) 铁芯磁路为线性,不计磁饱和效应。 3. 转子运动方程 各类交流电机的转子运动方程都是一样的,即 ?? ??? = ++=t p t J R T T d d d d 0ΩL em θΩΩΩ (6-1) 式中,Ω为转子机械角速度,θ为转子位置角,0p 为电机极对数,J 为转动部分的转动惯量,ΩR 为机械阻尼系数。其区别仅在于电磁转矩em T 的不同计算。
电机转矩功率转速电压电流之间的关系及计算 公式 Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】
电机转矩、功率、转速之间的关系及计算公式 电动机输出转矩: 使机械元件转动的力矩称为转动力矩,简称转矩。机械元件在转矩作用下都会产生一定程度的扭转变形,故转矩有时又称为扭矩。 转矩与功率及转速的关系:转矩(T)=9550*功率(P)/转速(n) 即:T=9550P/n—公式【1】 由此可推导出: 转矩=9550*功率/转速《===》功率=转速*转矩/9550,即P=Tn/9550——公式 【2】 方程式中: P—功率的单位(kW); n—转速的单位(r/min); T—转矩的单位(N.m); 9550是计算系数。 电机扭矩计算公式 T=9550P/n 是如何计算的呢? 分析: 功率=力*速度即 P=F*V---————公式【3】 转矩(T)=扭力(F)*作用半径(R) 推出F=T/R---——公式【4】 线速度(V)=2πR*每秒转速(n秒)=2πR*每分转速(n分)/60=πR*n分/30---——公式【5】 将公式【4】、【5】代入公式【3】得: P=F*V=T/R*πR*n分/30 =π/30*T*n分 -----P=功率单位W, T=转矩单位N.m, n分=单位转/分钟 如果将P的单位换成KW,那么就是如下公式: P*1000=π/30*T*n 30000/π*P=T*n30000/3.1415926*P=T*n9549.297*P=T*n 这就是为什么会有功率和转矩*转速之间有个9550的系数关系。。。 电动机转矩、转速、电压、电流之间的关系 由于电功率P=电压U*电流I,即 P=UI————公式【6】 由于公式【2】中的功率P的单位为kw,而电压U的单位是V,电流I的单位是A,而UI 乘积的单位是V.A,即w,所以将公式【6】代入到公式【2】中时,UI需要除以1000以统一单位。 则: P=Tn/9550=UI/1000————公式【7】 ==》Tn/9.55=UI————公式【8】 ==》T=9.55UI/n————公式【9】 ==》U=Tn/9.55I————公式【10】 ==》I=9.55U/Tn————公式【11】 方程式【7】、【8】、【9】、【10】、【11】中: P—功率的单位(kW);
同步电机数学模型的建立和仿真 姓名:包邻淋 专业:控制工程 学号:1402094
摘要 (3) 1同步电机数学模型的建立 (4) 1.1模型的导出思路 (4) 1.2变量置换用的表达式 (5) 1.4电机实用模型 (6) 1.5电机实用模型的状态空间表达式 (8) 1.6电机模型参数的确定 (10) 2 同步电机数学模型的仿真 (13) 2.1同步发电机仿真模型 (13) 2.2不同阶次模型的仿真分析 (14) 参考文献 (17)
摘要 一般发电机存在临诸多问题,建立精确地描述同步发电机的数学模型是十分必要的[1]。电力系统数字仿真因具有不受原型系统规模和结构复杂性限制,能保证被研究系统的安全性,且具有良好的经济性、方便性等优点。 常用的同步发电机数学模型由同步发电机电路方程及转子运动方程两部分组成。同步发电机电路方程又分为基本方程和导出模型两类[4]。对于不同的假设条件,同步发电机模型可作不同程度的简化,因此同步发电机的导出模型也有不同的形式。同一假设条件下,不同的同步发电机数学模型,其主要区别在于电机的转子绕组数,有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,则称之为转子7阶模型[5]。如果转子绕组数减少,则发电机方程组的阶数也相应减少。 本文通过MATLAB/simulink进行仿真计算,比较采用不同的同步发电机模型时,对系统的稳定性分析的影响。在此基础上提出在不同情况下进行电力系统仿真计算选取同步发电机数学模型的方法。
1同步电机数学模型的建立 1.1模型的导出思路 由于定转子间的相对运动,基于空间静止不动的三相坐标系所建立的原始方程,磁链方程式中会出现变系数,这对方程组的求解和模型的建立造成了很大的困难。现在通用的方法是对原始方程做d q变换(又称为派克变换),将原方程从a b c三相静止不动坐标系变为与转子相对静止的d q坐标系。 基本方程中有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,若设,则原方程为5阶,若转子运动方程为,;所含变量为,。。在化为实用模型时 和保留,用取代,再用5个磁链方程消去3个转子电流,以及2个定子磁链,而 则用实用变量代替。 经过上述思路导出的实用模型,除了以及引入的等效实用变量之外方程中系数都是同步电机技术参数中的电抗和时间
三相异步电动机功率的计算 2008-4-29 0:40:40 现场找不到功率表,要求以钳式电流表代替。即用电流表套住一根主电缆,测量其交流电流值,并换算为功率。 ※工人师傅的经验公式为:P=0.5*I 其中:P为电机有功功率,单位千瓦;I为实测电流,单位安培。 然则问题是,何以证明此经验公式? 三、问题的研究 电机是普通三相异步电动机,Y型接法。额定电压380V,额定功率7.5KW,额定电流15.2A。 通过经验可知,三相电机总功率等于3乘以每相的功率,即p=3*u*i,其中: p为三相电机总功率,单位瓦 u为相电压,单位伏 i为相电流,单位安注:暂用字母大小写区分相电压与线电压 又查阅资料知,线电压等于1.732倍相电压,线电流等于相电流,即p=3*(U/1.732)*I,其中: p为三相电机总功率,单位瓦 U为线电压,即380伏 I为线电流,即钳式电流表实测电流,单位安 故:得到公式p=1.732*U*I 四、问题的解决 综上,P=1.732*U*I*cosφ/1000,其中: P为三相电机有功功率,单位千瓦
U为线电压,即380伏 I为线电流,即钳式电流表实测电流,单位安 cosφ为功率因数,针对电机通常取0.8 故:P=0.52*I≈0.5*I(KW),公式得证。 五、问题的补充 1 三相四线制 三相四线制供电方式,即国际电工委员会(IEC)规定的TN-C方式,是用工作零线兼作接零保护线,可以称作保护中性线,可用NPE表示。故三根相线、一根中性线。 三相五线制供电方式,即国际电工委员会(IEC)规定的TN-S方式,是把工作零线N和专用保护线PE严格分开的供电系统。故三根相线、一根工作零线、一根保护零线。 单相三线制是三相五线制的一部分,即根据国际电工委员会(IEC)标准和国家标准而定的TN—S系统,在配电中出现了N线和PE线。故相线、零线、接地线。 三相三线制一般常用于电力输送和工厂强力电源供电,它不是国际电工委员会(IEC)规定的方式。 2 Y型接法 采用三相三线制的三角形接法,为三组线圈头尾相接,适用于4.5KW以下电动机 采用三相四线制的Y形接法又称星形接法,为三组线圈的三个尾相接,形成一个Y形,适用于4.5KW以上电动机
长江三峡水电枢纽
同步汽轮发电机的转子同步水轮发电机的转子气隙 定子 同步发电机的FLASH.SWF 11
定子上3个等效绕组 a 相绕组 b 相绕组 c 相绕组 转子上3个等效绕组 同步发电机简化为:定子3个绕组、转子3个绕组、气隙、定子铁心、转子铁心组成的6绕组电磁系统励磁绕组 d 轴等效的阻尼绕组轴等效的阻尼绕组Q 15d 轴 q 轴120度 120度 120度 定子、转子铁心同轴(忽略定、转θ sin )M F =磁动势零点 θ 的,无饱和,无磁滞和涡流损耗,
19 磁链与电流、电压的参考正方向 1、设转子逆时针旋转为旋转正方向; 3、定子三相绕组端电压的极性与相电流正方向按发电机惯例来定义,即 正值电流i a 从端电压u a 的正极流出发电机,b 、c 相类似。 定子绕组的正电流产生负的磁链!! 2、定子三相绕组磁链ψa ,ψb ,ψc 的正方向与a 、b 、c 三轴正方向一致; + -21 5、d轴上的励磁绕组f、阻磁链正方向与d轴磁链正方向与q轴的正方向一致;正电流由端电压,因此绕组电阻: a 相绕组 b 相绕组 c 相绕组 +
26 励磁绕组d 轴阻尼绕组 轴阻尼绕组 绕组、 28 绕组的磁链方程-6个 定子绕组的磁链a 相绕组的磁链= a 相绕组电流产生的自磁链+ b 相绕组电流产生的互磁链+ c 相绕组电流产生的互磁链+励磁绕组电流产生的互磁链+D 绕组电流产生的互磁链 + Q 绕组电流产生的互磁链
31 转子绕组的磁链励磁绕组的磁链= a 相绕组电流产生的互磁链+ b 相绕组电流产生的互磁链+ c 相绕组电流产生的互磁链+励磁绕组电流产生的自磁链+D 绕组电流产生的互磁链+ Q 绕组电流产生的互磁链 36 a 相绕组磁路磁阻(磁导)的变化与转子d 轴与a 相绕组轴线的夹角θa (=ωt )有关 磁路的磁导λaa ,自感L aa 为θa 的周 期函数,周期为π。 θa θa =±π/2 磁路磁导最小,自感最小 a θa =0,π磁路磁导最大,自感最大 a
6.5 异步电动机的动态数学模型和坐标变换 本节提要 异步电动机动态数学模型的性质 三相异步电动机的多变量非线性数学模型 坐标变换和变换矩阵 三相异步电动机在两相坐标系上的数学模型 三相异步电动机在两相坐标系上的状态方程 一、异步电动机动态数学模型的性质 2. 交流电机数学模型的性质 (1)异步电机变压变频调速时需要进行电压(或电流)和频率的协调控制,有电压(电流)和频率两种独立的输入变量。在输出变量中,除转速外,磁通也得算一个独立的输出变量。因为电机只有一个三相输入电源,磁通的建立和转速的变化是同时进行的,为了获得良好的动态性能,也希望对磁通施加某种控制,使它在动态过程中尽量保持恒定,才能产生较大的动态转矩。 多变量、强耦合的模型结构 由于这些原因,异步电机是一个多变量(多输入多输出)系统,而电压(电流)、频率、磁通、转速之间又互相都有影响,所以是强耦合的多变量系统,可以先用图来定性地表示。
图6-43 异步电机的多变量、强耦合模型结构 模型的非线性 (2)在异步电机中,电流乘磁通产生转矩,转速乘磁通得到感应电动势,由于它们都是同时变化的,在数学模型中就含有两个变量的乘积项。这样一来,即使不考虑磁饱和等因素,数学模型也是非线性的。 模型的高阶性 (3)三相异步电机定子有三个绕组,转子也可等效为三个绕组,每个绕组产生磁通时都有自己的电磁惯性,再算上运动系统的机电惯性,和转速与转角的积分关系,即使不考虑变频装置的滞后因素,也是一个八阶系统。 总起来说,异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。 二、三相异步电动机的多变量非线性数学模型 假设条件: (1)忽略空间谐波,设三相绕组对称,在空间互差120°电角度,所产生的磁动势沿气隙周围按正弦规律分布; (2)忽略磁路饱和,各绕组的自感和互感都是恒定的; (3)忽略铁心损耗; (4)不考虑频率变化和温度变化对绕组电阻的影响。
同步电机的基本方程式及数学模型 派克方程 1.1 理想电机假设 (1)电机磁铁部分的磁导率为常数,因此可以忽略掉磁滞、磁饱和的影响,也不计涡流及集肤效应作用等的影响; (2)定子的三个绕组的位置在空间互相相差120°电角度,3个绕组在结构上完全相同。同时,他们均在气隙中产生正弦分布的磁动势; (3)定子及转子的槽及通风沟等不影响电机定子及转子的电感,因此认为电机的定子及转子具有光滑的表面; 为了分析计算,还需要设定绕组电流、磁链正方向。 1.2 abc 坐标下的有名值方程 同步电机共有6个绕组分别为:定子绕组a,b,c ,转子励磁绕组f ,转子d 轴阻尼绕组D 以及转子q 轴阻尼绕组Q 。需要求出每个绕组的电压、电流和磁链未知数,因此一共需要18个方程才能求解。 电压方程: 00 a a a a b b b b c c c c f f f f D D D D Q Q Q Q u p r i u p r i u p r i u p r i u p r i u p r i ψψψψψψ=-?? =-??=-?=-?? =-≡??=-≡? D 绕组与Q 绕组均为无外接电源闭合绕组,因此电压均为0,从而上式中一共有8个方 程。 磁链方程: 11a a aa ab ac af aD aQ b b ba bb bc bf bD bQ c c ca cb cc cf cD cQ f f fa fb fc ff fD fQ Da Db Dc Df DD DQ D D Qa Qb Qc Qf QD QQ Q Q i L L L L L L i L L L L L L i L L L L L L i L L L L L L L L L L L L i L L L L L L i L ψψψψψψ-???? ??????? ?-??????????-??????=? ????? ?????? ??????????????? ????? =(33)12(33)21(33)22(33)abc fDQ i L L L i ????-???????????? 在电感矩阵中(针对凸极机),定子绕组自感和互感参数是随转子位置而变化的参数, 而在转子绕组中,转子的自感和互感参数均为常数,而且D 轴与Q 轴正交,则D 轴绕组与Q 轴绕组互感为0。定子与转子之间的互感参数显然是随转子位置变化的参数。
MATLAB在异步电机仿真中的应用 摘要:在同步旋转坐标系上(M、 T 坐标系) 推导出异步电机数学模型, 并应用 MATLAB/ SIMULINK 对其进行实际仿真,并且运用电机的参数验证了所建模型的正确性,并得出电机转速、电机稳定运行三相电流、电机转矩图。 关键词:仿真异步电机数学模型 MATLAB 一、引言 Matlab 语言是一种面向科学工程计算的高级语言,它集科学计算自动控制信号处理神经网络图像处理等功能于一体,是一种高级的数学分析与运算软件,可用作动态系统的建模和仿真。 目前,电机控制系统越来越复杂,不断有新的控制算法被采用仿真是对其进行研究的一个重要的不可缺少的手段 Matlab 的仿真研究功能成功方便地应用到各种科研过程中。 本文将结合Matlab/Simulink 的特点,介绍异步电动机在同步旋转坐标系(M 、T 坐标系)的数学建模与仿真方法在建模与仿真之后,可利用Simulink 将模型封装起来,使用时只需调用该模型并输入电机参数即可,为变频调速系统及控制方法的仿真研究提供了一种性能可靠使用方便的电机通用仿真模型。 异步电机的动态模型是高阶、非线性、强耦合的多变量系统 ,通过坐标变换的方法对其进行简化后 , 模型简单得多, 但其非线性、多变量的本质并未改变。描述电机的仍是一组高阶、变系数的微分方程,用传统的方法对其进行仿真分析并非易事。为了解决这一难题,本文利用异步电动机在同步旋转坐标系上(M、T 坐标系)的电压方程、磁链方程、转矩方程、运动方程实现了异步电动机的模型。 建立好数学模型之后。利用MATLAB/SIMULINK仿真软件成功搭建在同步旋转坐标系下的电机的数学模型。使得模型的建立更加简洁、明了,充分利用MATLAB/ SIMULINK提供的模块,建立了普通异步电动机的仿真模型,并对实际电机进行了仿真。 二、异步电机的仿真数学模型 利用MATLAB 进行电机运行状态仿真,最为关键的是建立起一个方便于仿真的电机模型。在本文的实例中,将在同步旋转两相坐标系下对一个直接接入三相电网的异步鼠笼电机建立一个可方便用于SIMULINK仿真的电机模型。 为了区分于一般的同步旋转 d、q 坐标系统,这里采用M、T坐标轴代替d、 q轴,且令M 轴与电机中转子总磁链ψ 2方向一致(转子总磁链ψ 2 等于气隙磁链 ψ g 与转了漏磁链ψ 21 之和),即把M轴定向到ψ 2 的方向。由于ψ 2 固定在M轴方 向上,所以转子磁链在T轴方向上就没有分量, 即ψ M2=ψ 2 。而转换到两相同步旋