光纤陀螺仪指标(国军标)1
- 格式:pdf
- 大小:297.79 KB
- 文档页数:40
光纤陀螺仪的原理与应用1. 引言光纤陀螺仪(Fiber Optic Gyroscope,简称FOG)是一种基于光学原理的惯性导航仪器,用于测量和检测物体的角速度。
光纤陀螺仪在航空航天、导航定位、地震监测等领域有着广泛的应用。
2. 原理光纤陀螺仪的工作原理基于光的干涉现象。
其主要由光源、光纤环、检测器等组成。
•光源:光源发出具有特定波长的光信号。
•光纤环:光纤环是由光纤绕成的一个环状结构,一端接光源,另一端接检测器。
•检测器:检测器用于接收和检测光信号。
当光源发出光信号后,光信号会在光纤环中传播,形成一个封闭光路径。
当光纤环受到旋转等外界作用力时,由于光的波长不变,光信号在光纤环中的传播速度会受到影响,从而引起光的相位差的变化。
通过检测器检测到这一变化,可以得到物体的角速度信息。
3. 优势与应用光纤陀螺仪相较于传统的机械陀螺仪具有以下优势:•高精度:光纤陀螺仪具有高精度的角速度测量能力,能够实现微小角度的测量。
•稳定性:光纤陀螺仪的结构简单,没有磨损部件,因此具有较长的寿命和较好的稳定性。
•抗干扰能力强:光纤陀螺仪能够抵抗振动、温度变化等外界干扰,确保测量的准确性。
•体积小、重量轻:光纤陀螺仪相较于传统陀螺仪,具有体积小、重量轻的特点,适用于各种空间受限的环境。
由于光纤陀螺仪的优势,它在许多领域都有广泛的应用:•航空航天:光纤陀螺仪可以用于航空航天器的导航、姿态控制等,提高飞行安全性和精确度。
•自动驾驶:光纤陀螺仪可以用于自动驾驶车辆的定位和导航系统,实现精确的定位和路径规划。
•地震监测:光纤陀螺仪可以用于地震监测,实时检测地壳运动,提供地震预警。
•水下探测:光纤陀螺仪可以用于水下机器人的导航和定位,提供精确的水下探测能力。
4. 发展与未来趋势光纤陀螺仪是惯性导航技术的重要组成部分,随着科技的不断进步,光纤陀螺仪将继续发展并在更多领域应用。
•提高精度:目前的光纤陀螺仪已经具备较高的精度,但未来仍有提升空间。
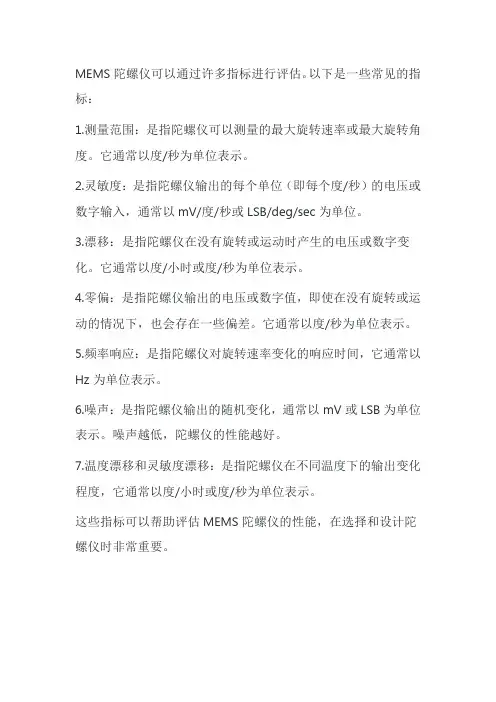
MEMS陀螺仪可以通过许多指标进行评估。
以下是一些常见的指标:
1.测量范围:是指陀螺仪可以测量的最大旋转速率或最大旋转角度。
它通常以度/秒为单位表示。
2.灵敏度:是指陀螺仪输出的每个单位(即每个度/秒)的电压或数字输入,通常以mV/度/秒或LSB/deg/sec为单位。
3.漂移:是指陀螺仪在没有旋转或运动时产生的电压或数字变化。
它通常以度/小时或度/秒为单位表示。
4.零偏:是指陀螺仪输出的电压或数字值,即使在没有旋转或运动的情况下,也会存在一些偏差。
它通常以度/秒为单位表示。
5.频率响应:是指陀螺仪对旋转速率变化的响应时间,它通常以Hz为单位表示。
6.噪声:是指陀螺仪输出的随机变化,通常以mV或LSB为单位表示。
噪声越低,陀螺仪的性能越好。
7.温度漂移和灵敏度漂移:是指陀螺仪在不同温度下的输出变化程度,它通常以度/小时或度/秒为单位表示。
这些指标可以帮助评估MEMS陀螺仪的性能,在选择和设计陀螺仪时非常重要。

光纤陀螺“四位置”误差机理研究作者:王夏霄王野李立京邬战军王爱民彭志强来源:《现代电子技术》2013年第18期摘要:光纤陀螺惯导系统在位置标定实验时,光纤陀螺绕输入基准轴的不同位置零偏不一致,称为“四位置”误差。
结合光纤惯性组合标定时出现的“四位置”误差问题,通过对光纤陀螺法拉第效应误差模型和对实验数据的分析,研究了“四位置”误差与光纤陀螺磁敏感性和输入轴失准角之间的关系。
得出光纤陀螺“四位置”误差主要是由地磁场影响造成。
对光纤陀螺采用磁屏蔽措施,可以显著减少“四位置”误差。
关键词:光纤陀螺仪;磁敏感性;四位置误差;失准角中图分类号: TN911⁃34; U666.1 文献标识码: A 文章编号: 1004⁃373X(2013)18⁃0138⁃040 前言光纤陀螺是一种新型的基于Sagnac效应的角速度传感器,近30年中取得飞速发展,已经广泛应用于海、陆、空、潜、天等诸多领域。
光纤陀螺的主要敏感元件是由光纤绕制的光纤环。
由于光纤本身可以敏感多种物理量,造成光纤陀螺的各种非互易误差[1⁃2],而这些误差源在光纤陀螺系统中有各种各样的表现形式,“四位置”误差便是其中之一[3]。
通过实验测定拟合曲线得出某只陀螺“四位置”误差已经与精度指标相当。
分析了造成“四位置”误差的主要原因,并且提出了降低“四位置”误差的方案。
最后通过实验验证了造成“四位置”误差主要原因为磁敏感性,并且所提磁屏蔽方案使光纤陀螺的“四位置”误差显著降低。
1 “四位置”误差为了说明光纤陀螺“四位置”误差,首先对北航研制的某只陀螺建立平面坐标系,如图1所示。
在光纤捷联惯性系统做位置标定时,发现当光纤陀螺输入基准轴(Input Reference Axis,IRA)即z轴朝上,则光纤陀螺转动90°相差的四个位置(即陀螺x轴分别指向东南西北)时,理论上由于光纤陀螺敏感轴指向不变其输出应该相等,但实际测量结果在这四个位置光纤陀螺输出存在较大的偏差,称之为“四位置”误差[4⁃5]。
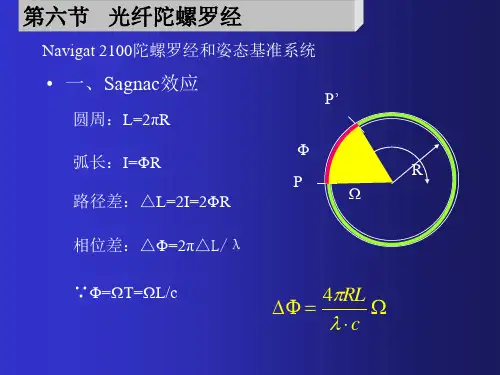
光纤陀螺术语及测试方法光纤陀螺术语及测试方法一、光纤陀螺原理以萨格耐克(Sagnac)效应为基础,由光纤环圈构成的干涉仪型角速度测量装置。
当绕其光纤环圈等效平面的垂线旋转时,在环圈中以相反方向传输出的两束相干光之间产生相位差,其大小正比于该装置相对于惯性空间的旋转角速度,通过检测输出光干涉强度即反映出角速度的变化。
二、术语及定义1、启动时间光纤陀螺在规定的工作条件下,从加电开始至达到规定性能所需要的时间。
2、零偏当输入角速率为零时,衡量光纤陀螺输出量均值的大小,以规定时间内输出量均值相应的等效输入角速度表示。
不包括由于滞后和加速引起的输出。
3、零偏稳定性当输入角速度为零时,衡量光纤陀螺输出量围绕其均值的离散程度。
以规定时间内输出量的标准偏差相应的等效输入角速度表示,也可称为零漂。
4、零偏重复性在同样条件下及规定间隔时间内,多次通电过程中,光纤陀螺零偏相对其均值的离散程度。
以多次测试所得零偏的标准偏差表示。
5、零偏温度灵敏度相对于室温零偏值,由温度变化引起光纤陀螺零偏变化量与温度变化量之比,通常取最大值表示。
6、随机游走系数表征光纤陀螺中角速度输出白噪声大小的一项技术指标,它反映的是光纤陀螺输出的角速度积分(角度)随时间积累的不确定性(角度随机误差),也称为角随机游走。
7、标度因数陀螺输出量与输入角速率的比值。
标度因数通常是用某一特定直线的斜率表示。
该直线可以根据在整个输入范围内周期地改变输入量所得到的输入/输出数据,用最小二乘法进行拟合来求得。
8、标度因数非线性度在输入角速度范围内,光纤陀螺输出量相对于最小二乘法拟合直线的最大偏差值与最大输出量之比。
9标度因数重复性在同样条件及规定的角速率下,多次测量过程中,光纤陀螺标度因数之间的一致程度。
以各次测试所得的标度因数的标准偏差与其平均值之比表示。
10、标度因数温度灵敏度相对于室温标度因数,由温度变化引起的标度因数变化率与温度变化量之比。
通常以最大值表示。

gjb靶场光电测量标准光电测量是一项用于测量光的特性和光与物质之间相互作用的技术。
在现代工业中,光电测量广泛应用于光学仪器的校准和精密测量中。
为了准确而可靠地进行光电测量,需要有一套标准来确保测量结果的一致性和可比性。
其中,gjb靶场光电测量标准是一项比较常用的标准,下面将对其进行详细介绍。
gjb靶场光电测量标准是中国军用标准的一种,其全称为《光电量测量标准》(GJB 383A-2002)。
该标准是由中国军事科学学会光学与电子学会进行制定的,目的是为了确保光电测量结果的准确性和可靠性,并且能够满足军事相关领域的需求。
gjb靶场光电测量标准主要包括以下几个方面的内容:1.测量标准:标准中规定了光电测量的基本原理和方法,以及常用的光电量测量指标和标准单位。
这些标准可以帮助测试人员准确地进行光电测量,并且保证了测量结果的可比性。
2.测量设备:标准中规定了光电测量所需的设备和仪器的要求,包括光源、光谱仪、光电探测器等。
这些设备需要满足一定的性能指标,以确保测量结果的准确性和可靠性。
3.标定方法:标准中详细描述了光电测量的标定方法和流程。
标定是将测量结果与真实值进行比较并进行校准的过程,可以消除测量误差并提高测量精度。
标准中指定了标定所需的标准物件和标定系列,并给出了具体的标定步骤和评定方法。
4.数据处理:标准中对光电测量数据的处理方法和要求进行了规定。
这些规定包括数据采集、数据处理、数据分析和结果判定等方面,旨在确保测量结果的可靠性和一致性。
5.光电测量系统的验证:标准中还规定了对光电测量系统进行验证的方法和要求。
验证是为了确定测量系统是否符合标准要求和是否能够提供准确和可靠的测量结果。
标准中给出了验证所需的测试项目和验证步骤,并对验证结果的判定进行了说明。
总的来说,gjb靶场光电测量标准是一套非常详细和全面的光电测量规范,旨在确保光电测量结果的准确性和可靠性。
这些标准和规定可以帮助测试人员更好地进行光电测量,并且保证了测量结果的可比性和可靠性。
1.1国内外光纤陀螺研究现状1.1.1国外光纤陀螺的研究现状Pircher和Hepner在1967年提出光纤陀螺,后由美国Utah大学Vali和orthill 于1976年经过实验演示,从此光纤陀螺(Fiber optic gyroscope)以其态结构所具有的优势,引起科技界的瞩目。
截止到20世纪90年代,全世界研制光纤陀螺及其系统的单位已经有几十家,精度范围已经覆盖了从战术级到惯性级、精密级的各种应用。
霍尼韦尔公司(Honeywell)是航空和军事领域光学陀螺产品的最主要研制单位,该公司从1991年开始批量生产光纤陀螺及其系统。
其研制的AHZ-800型光纤陀螺(0.5/h)姿态航向基准系统1995年被Dornier 328-100和Dornier 328-110系列飞机认可,目前已交付了上万套光纤陀螺姿态/航向基准系统(AHRS),作为标准配置广泛应用于许多商业的和定期的飞机(包括Embraer145支持客机、Dornier 328支线客机、波音777、Cessna Excel商业喷气飞机和史密斯公司Learjet 45商业喷气飞机)上。
Honeywell公司在美国空军的支持下,还研制一种战术武器惯导系统用的光纤陀螺惯性测量单元(IMU),精度为(0.1/h)每月大约生产100套。
在可行性论证阶段,Honeywell公司研制的精密级光纤陀螺已经达到偏置稳定性为0.0003/h,角随机游走为0.0001°/h,标度因数稳定性小于1ppm。
Honeywell公司的精密级光纤陀螺已经应用在高精度飞船导航、飞船定位和稳定(“哈勃”望远镜)及战略导弹中。
格鲁曼(Northrop Grumman)公司在2001年兼并了利顿(Litton)工业公司,2002年从Audax集团接收了光纤传感技术公司,是美国最有影响的光纤陀螺及其系统产品的生产企业。
目前,格鲁曼公司为许多重要的军事应用和商业应用生产光纤陀螺和惯性测量单元,陀螺漂移在1.0/h~0.001/h之间。
光纤陀螺捷联惯导多位置系统级标定方法标定技术是捷联惯导系统领域的一项关键技术,本质上是一种误差补偿技术。
按照观测量的不同可以分为分立式标定和系统级标定,由于前者在研究方法上比后者更加趋于成熟,因此常常采用分立式标定来确定惯组的数学模型。
分立式标定依靠高精度三轴转台来进行一系列实验来得出陀螺仪与加速计模型中的各项参数,实验步骤多、标定时间长,且标定精度受转台限制无法进一步提升。
为使标定更有效率,越来越多的学者转向系统级标定方法的研究。
本文介绍了两种系统级标定的一般方法,分别是滤波法和解析法,代表了系统级标定的两种不同思路。
相较于解析法,运用滤波的方法来求解标定模型不仅原理简单,而且不涉及复杂的数学推导,精度高,标定路径编排较少。
因此本课题以卡尔曼滤波为基础来进行系统级标定方案的设计。
直接将惯组的待标定参数扩充到状态量中,得到的是一个30维的大系统。
为降低试验设计难度,提高滤波精度,本文对其进行降维处理。
通过引入了一种基于行初等变换的可观测性分析方法,运用该方法可以直观地识别出状态方程中哪些状态独立可观测、哪些状态不可观测、哪些状态非独立可观测。
基于可观测性的分析结果,在原有的状态方程中,保留独立可观测量,剔除不可观测量、合并非独立可观测量,从而达到简化系统方程,降低系统维数的目的。
最后依据降维后的系统,设计出了6个静态位置与6个单轴旋转位置,并对此进行了仿真试验,仿真试验结果表明该方案具有理论可行性。
之后进行了实际转台试验,将其与分立式标定结果进行比较。
通过对比四组五级海况实验的姿态变化曲线,可以清晰的看出系统级方案的补偿效果整体上优于分立式标定,故而这种基于降维后的系统级标定滤波方案具有一定的工程实践价值。
2017年GJB国军标大全为满足各军工单位对于标准查询的需要,继整理了2018年最新的国军标大全后,301所旗下融融网又整理了这份2017年的国军标标准题录,希望对业内人士有所帮助。
gjb 9001c-2017 质量管理体系要求gjb 8955-2017 航空装备修理技术规范编制要求gjb 8905-2017 军队通用信息技术产品安全性测评要求gjb 8899-2017 装备目标特性工作通用要求gjb 8896-2017 地球表面空间网格与编码gjb 8893.4-2017 军用装备自然环境试验方法第4部分:库内大气自然环境试验gjb 8893.3-2017 军用装备自然环境试验方法第3部分:棚下大气自然环境试验gjb 8893.2-2017军用装备自然环境试验方法第2部分:户外大气自然环境试验gjb 8893.1-2017 军用装备自然环境试验方法第1部分:通用要求gjb/z 185-2017 军事电子信息系统需求开发指南gjb 8921-2017 舱外航天服医学要求与评价方法gjb 8890-2017 舰艇封存防锈油规范gjb 6494.7-2017 后勤信息分类与代码第7部分:军队财务类gjb 5313a-2017 电磁辐射暴露限值和测量方法gjb 4996a-2017 载人航天器与发射场系统接口要求gjb 4009a-2017 航天员系统与空间应用系统接口要求gjb 3914a-2017 电子对抗装备随机备件概算gjb 3830a-2017 目标电磁散射特性数据处理与格式要求gjb 3273a-2017武器装备研制项目技术审查gjb 2742a-2017 工作说明编写要求gjb 1419a-2017 军用计算机软件摘要gjb 500b-2017 飞机用透明材料和透明件术语GJB8887-2017海洋磁力图编绘规范GJB6494.8-2017后勤信息分类与代码第8部分:军需勤务类GJB8893.5-2017军用装备自然环境试验方法第5部分:表层海水自然环境试验GJB8897-2017军用电子元器件失效分析要求与方法GJB6494.9-2017后勤信息分类与代码第9部分:物资采购与进口类GJB8893.6-2017军用装备自然环境试验方法第6部分:海水长尺自然环境试验GJB8894.2-2017自然环境因素测定方法第2部分:海水环境因素GJB8919.2-2017军事信息系统建模与仿真通用要求第2部分:通信系统GJB8919.1-2017军事信息系统建模与仿真通用要求第1部分:总则GJB8917-2017长波授时技术要求GJB8916-2017军用标准时间术语GJB8901-2017卫星导航定位系统术语GJB8918-2017航空无线电导航装备电磁频谱参数限值和测量方法GJB8913-2017军用地面测高雷达规范GJB6494.10-2017后勤信息分类与代码第10部分:油料勤务类GJB/Z184-2017军事数据质量评价指南GJB2602A-2017空间太阳电池阵通用规范GJB2438B-2017混合集成电路通用规范GJB1090A-2017国防科技文献数据库著录格式GJB8895-2017装备测试性试验与评价GJB6494.11-2017后勤信息分类与代码第11部分:军交运输勤务类GJB8894.1-2017自然环境因素测定方法第1部分:大气环境因素GJB8891-2017民用半挂汽车列车运输履带式军事装备匹配技术要求gjb 8897-2017军用电子元器件失效分析要求与方法gjb 8895-2017装备测试性试验与评价gjb 8894.2-2017自然环境因素测定方法第2部分:海水环境因素gjb 8983-2017军用核材料实物盘存导则gjb 8980-2017天幕靶规范gjb 8978-2017地地导弹试验区域规划及勘察要求gjb 8977-2017星箭对接试验方法gjb 8971.2-2017载人航天应急救生地面控制规程第2部分:上升段逃逸安控gjb 8971.1-2017载人航天应急救生地面控制规程第1部分:待发段gjb 8963-2017军用飞机报废要求gjb 8962-2017飞行人员多人救生船规范gjb 8952-2017军用飞机地勤换装培训教材编制要求gjb 8948-2017水面舰艇复合防护装甲规范gjb 8946-2017自主布雷系统定型试验规程gjb 8935.1-2017多用途导弹武器系统定型试验规程第1部分:箱装导弹gjb 8929-2017单兵综合作战系统部队试验规程gjb 8919.3-2017军事信息系统建模与仿真通用要求第3部分:指挥控制系统gjb 8909-2017信息对抗装备系统划分及编码gjb 8907-2017气象装备技术保障车通用规范gjb 7788.4-2017地空导弹武器系统组网第4部分:管理与控制要求gjb 6850.230-2017水面舰船系泊和航行试验规程第230部分:红外辐射场试验gjb 6850.229-2017水面舰船系泊和航行试验规程第229部分:动力定位系统试验gjb 5082a-2017战术无线通信系统软件通信体系结构gjb 2239a-2017地地弹道式战术导弹飞行试验规程gjb 1821a-2017潜艇核动力装置术语gjb 1143a-2017无线电频谱特性的测量gjb 1028a-2017航天器坐标系gjb 730b-2017舰船燃气轮机通用规范gjb 186a-2017对空情报雷达部队试验规程gjb 8557-2016化学战剂染毒人员的洗消程序和技术要求gjb 8556.7-2016化学战剂中毒诊断与救治原则第7部分:刺激性毒剂gjb 8556.6-2016化学战剂中毒诊断与救治原则第6部分:窒息性毒剂gjb 8556.5-2016化学战剂中毒诊断与救治原则第5部分:全身中毒性毒剂gjb 8556.4-2016化学战剂中毒诊断与救治原则第4部分:失能性毒剂gjb 8556.3-2016化学战剂中毒诊断与救治原则第3部分:縻烂性毒剂gjb 8556.2-2016化学战剂中毒诊断与救治原则第2部分:神经性毒剂gjb 8556.1-2016化学战剂中毒诊断与救治原则第1部分:总则gjb 8555-2016高原部队人员用氧标准gjb 8296-2015潜艇长江拖带运输捆绑加固技术要求gjb 8295-2015野战输油管线系统通用技术要求和试验规程gjb 8235-2015军队加油卡规范gjb 8226-2015后勤保障数据模型编制规则gjb 4312a-2015二炮专用后勤装备质量分级和转级、退役与报废技术条件gjb 3124a-2015军队卫生害虫综合预防控制技术规范gjb 2563a-2015军队鼠害综合预防控制技术规范gjb 1918a-2015托盘单元货载gjb 1636a-2016军队营养调查与评价方法gjb 1443a-2015军品包装、装卸、运输、贮存的质量管理要求gjb 1368a-2015核弹头贮存库房环境放射性污染监测gjb 1350.4a-2015陆空军船艇术语第4部分:技术保障gjb 1350.3a-2015陆空军船艇术语第3部分:训练与使用gjb 1350.2a-2015陆空军船艇术语第2部分:船艇管理gjb 1350.1a-2015陆空军船艇术语第1部分:船艇及其设备gjb 1108.5-2015军用汽车油料鉴定试验规程第5部分:发动机冷却液gjb 1108.4a-2015军用汽车油料鉴定试验规程第4部分:制动液gjb 1108.3a-2015军用汽车油料鉴定试验规程第3部分:润滑脂gjb 1108.2a-2015军用汽车油料鉴定试验规程第2部分:齿轮油gjb 1108.1a-2015军用汽车油料鉴定试验规程第1部分:发动机润滑油gjb 823b-2016军人营养素供给量gjb 1448b-2017舰船电子对抗设备通用规范gjb 3684a-2017激光侦察告警设备通用规范gjb 5463a-2017通信与指控装备随机文件编制和配发要求gjb 8908-2017车载式机动指挥所上装设备集成通用要求gjb 4122a-2015军用食品包装贮运要求gjb 8293-2015军用炊事机械器材通用技术要求gjb 8294-2015军用服装产品规范指南gjb 8886-2017军用导航图图式gjb 8884-2017军用气象水文术语和符号gjb 902b-2017军用直升机飞行品质gjb 8885-2017军用空间天气术语和符号gjb 8883-2017军队文书档案整理技术要求gjb 3868a-2017潜射反舰巡航导弹定型试验规程gjb 3490a-2017航天器姿控飞轮规范gjb 3033a-2017舰船主汽轮机通用规范gjb 2859a-2017舰船自动操舵仪通用规范gjb 2837a-2017聚四氟乙烯软管组件规范gjb 2538a-2017地地战略导弹武器系统瞄准试验方法gjb 2521a-2017卫星通信地面侦察站天线规范gjb/z 177-2015舰艇坐坞船体结构强度计算方法gjb 8810-2015小屏蔽体屏蔽效能测量方法gjb 8774-2015舰船用超高压水射流除锈设备通用规范gjb 8765-2015航天用抗静电、屏蔽化纤编织套管通用规范gjb 8740-2015舰船高压锅炉用gh2984合金无缝管材规范gjb 8660-2015装甲材料防护系数测定方法gjb 8597-2015飞机前缘机动襟翼设计要求gjb 8595.3-2015数字式时分制指令/响应型多路传输数据总线测试方法第3部分:总线控制器有效性测试方法gjb 8595.1-2015数字式时分制指令/响应型多路传输数据总线测试方法第1部分:远程终端有效性测试方法gjb 8594-2015航空航天用镁合金锻件规范gjb 8593-2015航空用15crmnmova/e钢精密管材规范gjb 8589-2015飞机前起落架防摆设计要求gjb 8986-2017高超声速飞行器术语gjb 8985-2017航天器推进剂贮箱系列型谱gjb 8984-2017航天器发动机系列型谱gjb 8982-2017电子数据销毁通用要求gjb 8979-2017中继卫星系统轨道确定计算方法gjb 8976-2017航天发射场星箭联合操作规程gjb 8975-2017航天发射场大气电场监测要求gjb 8974-2017航天发射场安全设计准则gjb 8970-2017整体爆破类战斗部毁伤效应检验与评估方法gjb 8969-2017整体侵爆类战斗部毁伤效应检验与评估方法gjb 8968-2017弹用涡喷涡扇发动机高空模拟试验方法gjb 8967-2017弹用涡喷涡扇发动机畸变试验方法gjb 8966-2017侵彻子母弹毁伤效应检验与评估方法gjb 8964-2017地地导弹整体侵彻类战斗部通用规范gjb 8961-2017飞行人员单人救生船规范gjb 8960-2017机载预警数字阵列雷达规范gjb 8959-2017机载相控阵火控雷达通用规范gjb 8958-2017机载合成孔径雷达干涉测量系统通用规范gjb 8954-2017数字式时分制指令/响应型多路传输数据总线电连接器规范gjb 8953-2017飞机吊舱环境控制系统通用规范gjb 8949-2017常规潜艇悬停系统规范gjb 8945-2017舰船交流中压电器规范gjb 8935.3-2017多用途导弹武器系统定型试验规程第3部分:导弹运输装填车gjb 8935.2-2017多用途导弹武器系统定型试验规程第2部分:导弹发射车gjb 8934-2017装甲装备战场损伤等级评定gjb 8933-2017航空子母炸弹定型试验规程gjb 8932-2017末敏弹定型试验规程gjb 8931-2017装甲车辆火控系统定型试验规程gjb 8930-2017陆军船艇备品备件和供应品配置要求gjb 8928-2017军用直升机电传飞行控制系统通用规范gjb 8927-2017主战坦克部队试验规程gjb 8926-2017冲击桥部队试验规程gjb 8925-2017远程火箭炮完好性评定方法gjb 8924-2017自行火炮完好性评定方法gjb 8923-2017牵引火炮完好性评定方法gjb 8898-2017光纤陀螺仪通用规范gjb 8892.28-2017武器装备论证通用要求第28部分:风险评估gjb 8892.27-2017武器装备论证通用要求第27部分:效能评估gjb 8892.26-2017武器装备论证通用要求第26部分:经济性评估gjb 8892.25-2017武器装备论证通用要求第25部分:论证仿真gjb 8892.24-2017武器装备论证通用要求第24部分:军内科研条件建设gjb 8892.23-2017武器装备论证通用要求第23部分:装备出口gjb 8892.22-2017武器装备论证通用要求第22部分:装备(技术)引进gjb 8892.21-2017武器装备论证通用要求第21部分:延寿(退役)gjb 8892.20-2017武器装备论证通用要求第20部分:技术革新gjb 8892.19-2017武器装备论证通用要求第19部分:软件gjb 8892.18-2017武器装备论证通用要求第18部分:伪装gjb 8892.17-2017武器装备论证通用要求第17部分:机动性gjb 8892.16-2017武器装备论证通用要求第16部分:人-机-环境系统工程gjb 8892.15-2017武器装备论证通用要求第15部分:电磁环境适应性gjb 8892.14-2017武器装备论证通用要求第14部分:环境适应性gjb 8892.13-2017武器装备论证通用要求第13部分:安全性gjb 8892.12-2017武器装备论证通用要求第12部分:测试性gjb 8892.11-2017武器装备论证通用要求第11部分:保障性gjb 8892.10-2017武器装备论证通用要求第10部分:维修性gjb 8892.9-2017武器装备论证通用要求第9部分:可靠性gjb 8892.8-2017武器装备论证通用要求第8部分:研制总要求gjb 8892.7-2017武器装备论证通用要求第7部分:研制立项gjb 8892.6-2017武器装备论证通用要求第6部分:装备建设规划计划gjb 8892.5-2017武器装备论证通用要求第5部分:装备体制gjb 8892.4-2017武器装备论证通用要求第4部分:装备发展战略gjb 8892.3-2017武器装备论证通用要求第3部分:质量管理gjb 8892.2-2017武器装备论证通用要求第2部分:术语gjb 8892.1-2017武器装备论证通用要求第1部分:总则gjb 2476a-2017舰艇多功能标准显控台通用规范gjb 1255a-2017航空供氧面罩规范gjb 2091a-2017机载箔条干扰弹通用规范gjb 2042a-2017卫星电源系统规范。
光纤陀螺仪工作原理光纤陀螺仪(Fiber Optic Gyroscope,FOG)是一种基于光学原理的角速度测量仪器。
它利用了光在光纤中传播的特性和光的干涉效应来测量角速度,广泛应用于惯性导航、航天器姿态控制和惯性测量等领域。
光纤陀螺仪的工作原理基于Sagnac效应,该效应是由法国物理学家Georges Sagnac 在1913年首次发现的。
根据Sagnac效应,当任何一个光源经过旋转的介质后再次返回到光源处时,其相位将发生变化,这个相位差正比于旋转速度、旋转角度以及光源发出的光波长。
基于这个效应,光纤陀螺仪通过测量这种相位差来计算旋转角速度。
光纤陀螺仪的基本结构包括光源、光纤环路、探测器以及信号处理器。
其中,光源发出的光通过一根光纤分成两束,分别沿着光纤环路的顺时针和逆时针方向传播。
当光沿着环路传播一周后再次到达起点时,两束光将会干涉。
根据干涉的结果可以得到相位差,进而计算旋转角度。
当光纤环路没有旋转时,两束光的相位差为零,干涉之后形成零干涉。
而当光纤环路发生旋转时,在一个转向上的光波程将会变短,另一个转向上的光波程将会变长,导致干涉后的光强发生改变。
这种光强的改变可以通过探测器测量到,并转化为电信号。
为了提高精度,光纤陀螺仪通常采用双倍频技术或者相移技术。
在双倍频技术中,相位差小于光波长的情况下,光的相位差由49958次的红外量子光经过升频,变成了实际可以测量的相位差。
而相移技术则通过改变输入光波的相对相位,使干涉信号在正负半周中分离,从而提高了测量的灵敏度和精度。
信号处理器对探测到的光强信号进行处理,根据干涉信号的振幅、频率和相位差计算出旋转角速度。
与传统陀螺仪相比,光纤陀螺仪具有全固态、抗震动、体积小、精度高、长寿命等优点,广泛应用于航空航天、导航定位和惯性测量等领域。
总结来说,光纤陀螺仪的工作原理是基于光的干涉效应。
通过光纤环路中光在旋转的介质中传播后形成的干涉效应,测量旋转角速度。
光纤陀螺仪具有高精度、抗震动、体积小等优点,被广泛应用于各种导航和姿态控制系统中。