磁悬浮系统建模及其PID控制器设计说明
- 格式:doc
- 大小:498.50 KB
- 文档页数:13
基于单片机的磁悬浮小球控制系统设计
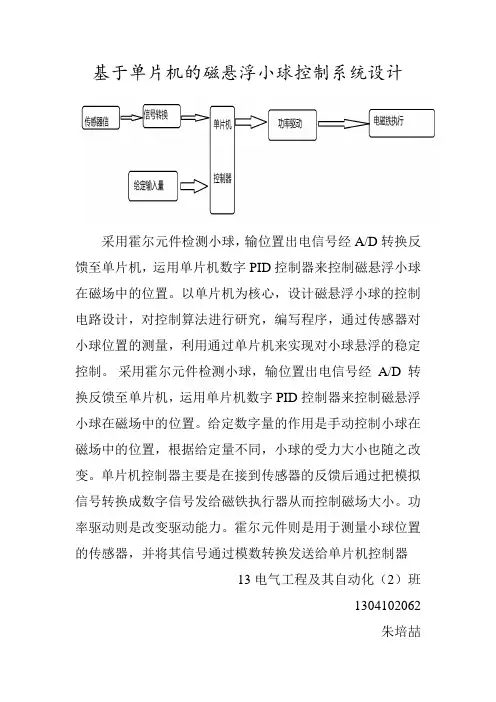
采用霍尔元件检测小球,输位置出电信号经A/D转换反馈至单片机,运用单片机数字PID控制器来控制磁悬浮小球在磁场中的位置。
以单片机为核心,设计磁悬浮小球的控制电路设计,对控制算法进行研究,编写程序,通过传感器对小球位置的测量,利用通过单片机来实现对小球悬浮的稳定控制。
采用霍尔元件检测小球,输位置出电信号经A/D转换反馈至单片机,运用单片机数字PID控制器来控制磁悬浮小球在磁场中的位置。
给定数字量的作用是手动控制小球在磁场中的位置,根据给定量不同,小球的受力大小也随之改变。
单片机控制器主要是在接到传感器的反馈后通过把模拟信号转换成数字信号发给磁铁执行器从而控制磁场大小。
功率驱动则是改变驱动能力。
霍尔元件则是用于测量小球位置的传感器,并将其信号通过模数转换发送给单片机控制器
13电气工程及其自动化(2)班
1304102062
朱培喆。
基于线性矩阵不等式的磁悬浮轴承鲁棒最优PID控制器设计摘要:为解决高速磁悬浮轴承电主轴系统建模不确定性问题,建立了磁悬浮轴承的鲁棒控制模型。
把闭环系统同时满足渐进稳定、H∞鲁棒性和LQR指标的鲁棒最优多目标综合问题转化为线性矩阵不等式的优化问题;为了实现对PID控制参数的整定,建立增广系统矩阵,通过求解满足增广系统鲁棒最优问题的线性矩阵不等式,得到鲁棒最优PID控制器。
关键词:磁悬浮轴承;鲁棒最优控制;PID参数整定;线性矩阵不等式Design of Robust Optimal PID Controller for Magnetic Bearing via LMIApproachAbstract: To settle the modeling uncertainty of the high-speed magnetic bearing spindle system, a robust control model of magnetic bearing was established of. The closed-loop system may need to meet the asymptotic stability, H∞ robust and LQR indicators at the same time. The problem can be transformed into an integrated LMI optimization problem. Finally, according to the relationship of the augmented system state feedback controller with PID control parameters, the PID control parameters was tuned to make a robust optimal PID controller.Key words: Magnetic Bearing;Robust Optimal Control;PID parameter tuning;LMI0 引言目前的控制系统中,应用最广泛的一类控制策略是PID控制。
车辆悬浮系统设计方案简介车辆悬浮系统是指通过使用悬浮技术,使车辆与地面之间保持一定的高度,从而实现“飞行”效果。
悬浮系统可以使车辆在行驶中减少摩擦阻力,提高行驶稳定性和安全性,同时也可以带来独特的驾驶体验。
本文将介绍一个车辆悬浮系统的设计方案,包括悬浮原理、悬浮控制、能源管理等方面的内容。
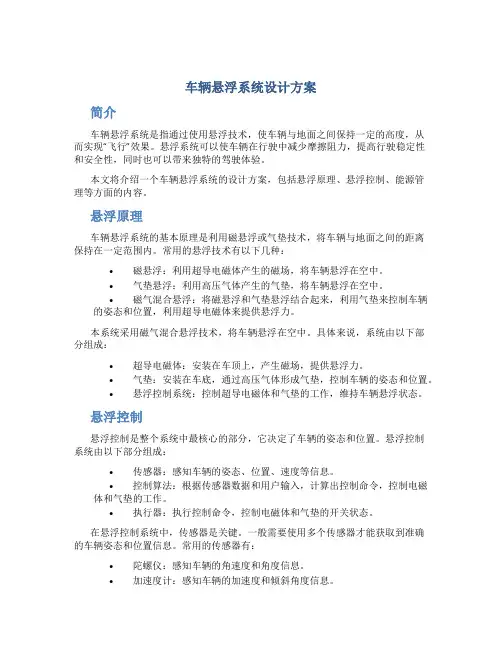
悬浮原理车辆悬浮系统的基本原理是利用磁悬浮或气垫技术,将车辆与地面之间的距离保持在一定范围内。
常用的悬浮技术有以下几种:•磁悬浮:利用超导电磁体产生的磁场,将车辆悬浮在空中。
•气垫悬浮:利用高压气体产生的气垫,将车辆悬浮在空中。
•磁气混合悬浮:将磁悬浮和气垫悬浮结合起来,利用气垫来控制车辆的姿态和位置,利用超导电磁体来提供悬浮力。
本系统采用磁气混合悬浮技术,将车辆悬浮在空中。
具体来说,系统由以下部分组成:•超导电磁体:安装在车顶上,产生磁场,提供悬浮力。
•气垫:安装在车底,通过高压气体形成气垫,控制车辆的姿态和位置。
•悬浮控制系统:控制超导电磁体和气垫的工作,维持车辆悬浮状态。
悬浮控制悬浮控制是整个系统中最核心的部分,它决定了车辆的姿态和位置。
悬浮控制系统由以下部分组成:•传感器:感知车辆的姿态、位置、速度等信息。
•控制算法:根据传感器数据和用户输入,计算出控制命令,控制电磁体和气垫的工作。
•执行器:执行控制命令,控制电磁体和气垫的开关状态。
在悬浮控制系统中,传感器是关键。
一般需要使用多个传感器才能获取到准确的车辆姿态和位置信息。
常用的传感器有:•陀螺仪:感知车辆的角速度和角度信息。
•加速度计:感知车辆的加速度和倾斜角度信息。
•GPS:获取车辆的位置和速度信息。
控制算法方面,可以采用PID控制器或基于模型的控制算法,来实现悬浮状态的控制。
执行器方面,可以使用电磁阀和电磁继电器等元件来控制气垫和电磁体的开关状态。
能源管理悬浮系统需要消耗大量的能量,因此能源管理是整个系统中非常关键的一环。
常用的能源管理方案有以下几种:•燃料电池:通过燃料电池产生的氢气来供电,具有高效、环保的特点。
磁悬浮列车运行控制系统的研究与设计磁悬浮列车是一种利用磁悬浮技术来运行的高速列车。
相比传统的轮轨列车,磁悬浮列车有更高的速度、更低的噪音和更少的维护成本,因此越来越受到人们的关注。
但是,磁悬浮列车也存在一些挑战,其中最重要的挑战是安全问题。
为了确保磁悬浮列车的安全性,需要设计一个高效的运行控制系统。
本文将探讨磁悬浮列车运行控制系统的研究与设计。
磁悬浮列车主要由车体、磁悬浮系统和运行控制系统三部分组成。
其中,磁悬浮系统是磁悬浮列车的核心部件,它通过磁力将车体悬浮在轨道上,并提供推进力,使列车运动。
运行控制系统则负责监测列车的状态,并控制磁悬浮系统的工作状态,从而实现列车的安全、高效运行。
磁悬浮列车的运行控制系统主要由控制器、传感器、执行器和通讯系统四个部分组成。
其中,控制器是运行控制系统的核心部件,它根据传感器收集到的数据,控制执行器的工作,从而实现列车的控制。
传感器则用于收集列车的运行状态,可以包括位置、速度、加速度、温度、湿度等方面。
执行器则负责控制磁悬浮系统的工作状态,根据控制器的指令来控制磁悬浮系统的电磁铁工作状态。
通讯系统则负责传输控制指令和传感器数据,在列车和控制中心之间建立起稳定的通讯连接。
为了确保磁悬浮列车的安全性,运行控制系统需要具备以下功能:1. 状态监测和控制功能。
运行控制系统需要能够准确地监测列车的位置、速度、加速度和姿态等状态,并根据这些数据控制磁悬浮系统的工作状态,以确保列车的平稳、高效运行。
2. 故障诊断和容错能力。
运行控制系统需要具备故障诊断和容错能力,能够及时检测和处理列车中发生的故障,保证列车在故障情况下的安全运行。
3. 紧急制动和停车控制功能。
运行控制系统需要具备紧急制动和停车控制功能,能够在紧急情况下及时停车,保证列车的安全。
为了实现以上功能,运行控制系统需要采用现代控制理论和控制方法。
其中,基于状态反馈的PID控制方法是最常用的控制方法之一,它可以通过不断调整控制量,使系统保持在稳定状态,从而实现良好的控制效果。
摘要电磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化技术。
随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和动力学的进展,电磁悬浮技术得到了长足的发展。
它的无接触、无摩擦、使用寿命长、不用润滑以及高精度等特殊优点引起世界各国科学界的特别关注,国内外学者和企业界人士都对其倾注了极大的兴趣和研究热情。
本文将采取 PID 控制方法对电磁悬浮系统进行位置随动控制,并进行校正,使系统达到稳定。
本文首先通过在工作点附近的线性化处理,得到系统数学模型的状态空间描述,并将其离散化,然后通过 MATLAB 和 SIMULINK 对系统进行仿真,对仿真结果进行分析之后,采用合理的校正方法,使系统稳定性满足要求。
关键词:PID 控制;电磁悬浮;位置随动控制AbstractThe electromagnetic levitation technology is electromagnetics, electronics, control engineering, signal processing, mechanics, dynamics as one of the typical mechatronics technology. As electronic technology, control engineering, development and progress of the dynamics of signal processing components, electromagnetic theory, and new magnetic materials, electromagnetic levitation technique has been developed by leaps and bounds. No contact, no friction, long life without lubrication, and high-precision special bit cause of particular concern for the world scientific community, scholars and business people to its devoted a great deal of interest and enthusiasm.This article will take the PID control method to position servo control of electromagnetic levitation system, and corrected, so that the system reaches a steady. Firstly, through a linear process in the vicinity of the operating point, the state space description of the mathematical model and its discretization, then the system simulation with MATLAB and SIMULINK, the simulation results are analyzed after correction, so that the stability of the system to meet the requirements.Keywords: PID control; Electromagnetic levitation; Position servo control目录第一章绪论 (1)1.1电磁悬浮技术概述 (1)1.1.1起源 (1)1.1.2电磁悬浮系统的构成 (1)1.2电磁悬浮技术应用 (2)1.2.1交通领域 (2)1.2.2工业领域 (2)1.3电磁悬浮技术的发展前景 (3)1.4本章小结 (4)第二章PID控制器简介 (5)2.1 PID控制器及原理 (5)2.2控制器参数对控制性能的影响 (6)2.2.1比例作用对控制性能的影响 (6)2.2.2积分作用对控制性能的影响 (6)2.2.3微分作用对控制性能的影响 (6)2.3采样周期的选取 (7)2.4本章小结 (7)第三章电流放大器控制系统 (9)3.1电磁悬浮系统的基本原理 (9)3.2过程模型 (10)3.2.1用线圈电流I和气隙e表示的吸引力F表达式 (10)3.2.2工作点e(t) e0附近过程的线性化 (10)3.2.3过程传递函数 (11)3.3电流放大器控制系统 (12)3.3.1 I (t)电流控制系统简介 (12)3.3.2 56mV阶跃响应 (13)3.3.3仿真研究 (14)3.4本章小结 (15)第四章位置随动控制 (16)4.1 x(t)位置控制系统的连续和离散模型 (16)4.2 x(t)数字随动控制 (19)4.3仿真研究 (23)4.4本章小结 (23)结论 (24)参考文献 (25)谢辞 (26)(内蒙古工业大学本科毕业设计说明书第一章绪论1.1 电磁悬浮技术概述1.1.1 起源电磁悬浮技术,是利用磁性的物体在空间中的非接触式悬浮状态稳定的旧观念。
电磁悬浮列车的动力学建模与控制随着科技的发展,交通运输工具也在不断更新换代。
电磁悬浮列车,作为一种高速、低能耗的交通工具,具备着较好的发展前景。
本文将讨论电磁悬浮列车的动力学建模与控制,并探讨其在未来交通运输中的应用。
首先,我们要了解电磁悬浮列车的工作原理。
电磁悬浮列车利用磁悬浮原理来实现悬浮和推进。
车身底部装有强磁铁,与车道下的电磁轨道形成磁力作用,使车身悬浮在轨道上方。
同时,列车上的电磁系统产生的电磁力推动列车前进。
电磁悬浮列车同时具备了悬浮和推进功能,使其能够在高速运行中更好地保持平稳。
接下来,我们可以开始对电磁悬浮列车的动力学进行建模。
动力学建模是在理论基础上对列车的运动特性进行描述的过程。
首先,我们可以利用牛顿第二定律来建立列车的位置和速度之间的关系。
由于电磁悬浮列车不与轨道发生摩擦,因此我们可以忽略摩擦力的影响。
在这种情况下,列车受到的合力等于质量乘以加速度。
通过这个关系,我们可以得到列车速度随时间的变化情况。
接着,我们还可以加入其他因素,如气动力和阻力,对列车的动力学进行更准确的建模。
在完成动力学建模后,我们需要对电磁悬浮列车进行控制。
控制系统的设计使列车能够保持平稳运行、减小振动、提高运行速度等。
传统的列车控制方法包括PID控制和模糊控制等。
PID控制是一种经典的控制算法,通过调节比例、积分和微分参数来实现位置或速度控制。
模糊控制则是一种基于模糊逻辑的控制方法,可以适应系统模糊性和不确定性,提高系统的稳定性和鲁棒性。
然而,随着科技的进步,现代控制方法也逐渐运用到电磁悬浮列车的控制上。
例如,模型预测控制(MPC)是一种在控制系统中广泛应用的先进控制方法。
MPC利用数学模型来预测系统未来的状态,并根据预测结果进行控制决策。
这种控制方法可以通过对列车运行状态的准确预测来提高轨道保持性能和降低能耗。
除了动力学建模和控制方法,电磁悬浮列车还涉及到安全和稳定性的问题。
由于列车在高速运行中存在许多不确定因素,如气动力、侧风等,我们需要进行安全性分析和控制策略的研究。
磁悬浮设计文档项目设计主题:基于MSP430F5438的交流磁悬浮控制器的设计完成时间:2013.11.14学生姓名:刘天月指导教师:王庐山○目○录一、引言 (1)二、MSP430F5438单片机简介 (1)三、磁悬浮控制系统结构框图 (2)四、系统功能实现分析 (2)五、程序功能说明 (3)六、程序清单(附) (5)一、引言磁悬浮是根据电磁感应原理和楞次定律,由交流电流通过线圈产生交变磁场,交变磁场使闭合的导体产生感生电流,感生电流的方向,总是使自己的磁场阻碍原来磁场的变化。
因此线圈产生的磁场和感生电流的磁场是相斥的,若斥力超过重力,可观察到磁悬浮现象。
交流磁悬浮控制器的设计采用MSP430F5438A单片机控制,由检测机构反馈高度电信号给单片机,再由MSP430F5438A单片机产生一路触发脉冲信号,控制交流调压模块电路的输出,从而实现对线圈高度的闭环控制。
二、MSP430F5438单片机简介MSP430系列单片机是美国德州仪器公司研发的一款16位超低功耗单片机[3],因为其具有精简指令集的混合信号处理器,所以称之为混合信号处理器。
该系列单片机具有如下特点:◆处理能力强MSP430系列单片机是一个16位的单片机,采用了精简指令集(RISC)结构,具有丰富的寻址方式(7 种源操作数寻址、4 种目的操作数寻址)、简洁的 27 条内核指令以及大量的模拟指令;大量的寄存器以及片内数据存储器都可参加多种运算;还有高效的查表处理指令。
这些特点保证了可编制出高效率的源程序。
◆运算速度快MSP430 系列单片机能在25MHz晶体的驱动下,实现40ns的指令周期。
16位的数据宽度、40ns的指令周期以及多功能的硬件乘法器(能实现乘加运算)相配合,能实现数字信号处理的某些算法(如FFT 等)。
◆超低功耗MSP430 单片机之所以有超低的功耗,是因为其在降低芯片的电源电压和灵活而可控的运行时钟方面都有其独到之处。
磁悬浮列车控制系统的设计与实现第一章绪论1.1 研究背景磁悬浮列车是一种高速交通工具,具有很高的运行速度和安全性。
它使用磁浮技术来悬浮在轨道上,并由电子控制系统控制运行速度和方向。
磁悬浮列车是未来城市交通的重要组成部分。
因此,研究磁悬浮列车的控制系统设计和实现是必不可少的。
1.2 研究意义对于磁悬浮列车控制系统,其可控制性和可靠性是至关重要的。
为保证磁悬浮列车的安全和稳定性,其控制系统需要具备快速而准确的响应能力,能够对所受到的各种外部干扰做出及时的反应。
同时,由于磁悬浮列车的运行速度和运行环境的特殊性,相较于传统的机电控制系统,其控制系统也具有一定的特殊性和复杂性。
因此,控制系统的设计和实现对于磁悬浮列车的实际应用意义重大。
1.3 研究现状国内外对于磁悬浮列车控制系统的研究工作已有所开展,尤其是在欧美和日本等发达国家,这项技术的研究早已成为他们国家高速交通发展的重要组成部分。
在我国,磁悬浮列车技术也已逐步发展,以上海磁浮列车为代表,逐渐引起广泛关注。
相关的研究工作也开始逐步开展。
第二章磁悬浮列车运行原理与控制系统设计2.1 磁悬浮列车运行原理磁悬浮列车基于磁悬浮技术,由电磁吸力悬浮在轨道上并靠电力驱动行驶,不需要接触式的轮轨接触,所以摆脱了机械磨损、轨道磨耗等问题,因此运行速度更快,噪音更小,对环境影响更小。
其主要结构由轨道悬浮系统、车体悬浮系统、车体控制系统、牵引驱动系统等组成。
2.2 磁悬浮列车控制系统设计一般来说,磁悬浮列车控制系统包含位置控制系统、速度控制系统和安全控制系统。
其中,位置控制系统主要负责保持车体在轨道中心位置上的悬浮高度;速度控制系统主要负责控制车体运行速度,以及计算和预测列车未来的位置和速度;安全控制系统主要负责监测车体状态、检测轨道故障、避免碰撞等安全保障措施。
第三章磁悬浮列车控制系统实现3.1 控制算法的实现磁悬浮列车控制系统的核心部分是控制算法,其能否正确实现直接影响到列车的运行安全和稳定性。
题目:磁悬浮系统的常规控制方法研究摘要磁悬浮的作用是利用电磁力克服物体的重力,使物体沿着或绕着某一基准框架的一轴或几轴保持固定位置不变,悬浮体和支撑之间没有任何接触。
因而克服了由摩擦带来的能量消耗和速度限制,磁悬浮技术是一门新兴的机电一体化技术,由于其具有无摩擦、无磨损、无需润滑、寿命长、低功耗、无噪声等优点,引起了世界各国科学界的特别关注。
磁悬浮系统性能的优劣很大程度上取决于控制器的特性,高精度、高响应频率和输出不受外界干扰的特性以及磁悬浮中参数的摄动和外界不确定的干扰因素都是难以解决的棘手问题,传统控制难以满足系统要求,因此对控制方法的研究有其非常重要的意义。
本文首先详细介绍了磁悬浮系统的基本组成及工作原理,并且利用动力学和电磁学原理在实验的基础上建立了磁悬浮系统的数字模型,运用PID控制、根轨迹、频域响应、状态空间等控制方法,研究磁悬浮系统的稳定性,指出磁悬浮系统是本质不稳定的,需通过控制器对其稳定控制。
其次,系统的研究了PID控制方法的特点与PID控制器的工作原理以及PID控制器的参数整定,然后,简单的介绍了根轨迹法、MATLAB 以及MATLAB中的Simulink, 在实验的基础上推导磁悬浮系统的的数学模型在Simulink上进行仿真。
最后,本文通过建立磁悬浮控制系统的数字模型,设计了磁悬浮PID 控制器,并对系统应用MATLAB仿真,绘制其根轨迹曲线和Bode图,进而分析了系统稳定性,根据传递函数搭建了simulink的仿真模型,在示波器中观察阶跃响应波形,适当调节PID参数,是系统动态性能达到良好。
关键词:磁悬浮; PID控制器;根轨迹; simulink仿真AbstractThe role of Maglev system is to use of electromagnetic force to overcome the object's gravity,and the object maintain a fixed position along or around one or few axis of a reference framework with no contact between the suspension and the support. Thus overcoming the energy consumption and speed limits caused by friction, Magnetic levitation is a relatively new technology in mechanic and electronics and has been paid special attention to in the scientific community of the world, because of its many merits such as no mechanical friction, no wear, no need of lubrication, long longevity, low power loss, and no noise, etc. The performance of magnetic levitation is determined mainly by the characteristic of its controller and solving the problems of the high precision, high response frequency, output immune from the disturbance, the parameter perturbation and the uncertain factors from outside is very difficult. The traditional methods cannot meet the needs of the system. So it has great significance to study the control method of magnetic levitation.This paper details the basic components and suspension system works, and the use of dynamics and electromagnetic theory on the basis of the experimental maglev system built digital models, the use of PID control, root locus, frequency response, state space control method to study the stability of the suspension system, suspension system that is essentiallyunstable, to be controlled by the controller to stabilize.Secondly, the systematic study of the characteristics of the PID control method works with the PID controller and PID controller parameter tuning, and then, a simple introduction to root locus method, MATLAB and the Simulink of MATLAB, derived on the basis of the experimental magnetic levitation mathematical model of the system on the simulation in Simulink.The paper establishes the mathematical model of maglev control system in which PID controller is designed for. And do the MATLAB simulation of system, drawing its root locus curve and Bode diagram. Then analyzes the system stability. Simulation model is built based on the transfer function. Observe the step response waveform in the oscilloscope. Adjusting the PID parameters appropriately to achieve good dynamic performance of the system.Key words:Magnetic levitation;PID controller;root locus;simulink simulation目录第一章绪论 (1)1.1磁悬浮技术应用背景 (1)1.2 磁悬浮技术的研究现状 (2)1.3 磁悬浮技术的研究意义 (4)1.4本论文的主要研究内容 (4)第二章磁悬浮系统的分析与建模 (5)2.1 磁悬浮系统的基本结构 (5)2.2磁悬浮系统的工作原理 (5)2.3 磁悬浮系统的动力学模型 (6)2.3.1运动方程 (6)2.3.2传递函数 (6)2.3.3开环响应 (7)2.4悬挂系统的PID设计方法 (9)2.4.1PID控制器 (9)2.4.2绘制闭环响应方框图 (9)2.5根轨迹的设计方法 (11)2.5.1滤波器 (11)2.5.2绘制闭环响应方框图 (13)2.6频域响应设计方法 (13)2.6.1频域响应BODE图 (13)2.6.2绘制闭环响应方框图 (14)2.7状态空间控制器 (15)2.7.1状态空间模型 (15)2.7.2状态空间的传递函数 (15)第三章磁悬浮系统的控制方法 (17)3.1 PID控制方法 (17)3.1.1 PID控制器简介 (17)3.1.2 PID控制器的基本组成 (18)3.1.3 PID控制器的参数整定 (19)3.1.4 PID控制器的控制规律 (21)3.2根轨迹控制 (22)3.3本章小结 (23)第四章磁悬浮系统仿真及结果分析 (24)4.1 MATLAB及Simulink简介 (24)4.2磁悬浮系统的Simulink仿真及结果分析 (24)第五章结论与展望 (28)参考文献 (29)致谢 (30)第一章绪论磁悬浮技术属于自动控制技术,它是随着控制技术的发展而建立起来的。
超高速列车磁悬浮控制系统设计与实现近年来,高速列车作为人们出行的重要选择,受到了越来越多的关注。
其中,磁悬浮列车具有高速稳定、无摩擦、无噪音等优点,被广泛认可作为未来城市轨道交通的发展方向。
而磁悬浮列车的核心部分便是磁悬浮控制系统。
本文将从磁悬浮控制系统的原理、设计和实现三个方面,介绍超高速列车磁悬浮控制系统的相关知识。
一、磁悬浮控制系统的原理磁悬浮列车是通过磁力悬浮技术实现悬浮和牵引的。
其中,磁悬浮控制系统是核心部分,它由车体姿态控制系统、悬浮力控制系统和进出站控制系统三个大部分构成。
1. 车体姿态控制系统车体姿态控制系统主要作用是控制车体在行驶中的姿态,确保车体的稳定性。
它能够通过控制悬浮力合力点(又称“补偿点”)的位置,来实现车体姿态的调整。
2. 悬浮力控制系统悬浮力控制系统主要作用是控制车体与轨道间的距离,以保持合适的悬浮高度。
其调节基于电磁簧的线圈,通过改变电磁簧中的电磁场强度,来修正车体与引导轨之间的距离差。
3. 进出站控制系统进出站控制系统主要作用是控制列车的运行速度、加减速度和停车位置等,以保证列车安全、平稳地进出车站。
二、磁悬浮控制系统的设计磁悬浮控制系统的设计,主要包括控制模型的建立和控制算法的设计。
1. 控制模型的建立磁悬浮控制系统的建模是为了寻找一种适合控制的模型,通常可以使用状态空间模型或者其他控制模型。
其中,状态空间模型可以将动态系统表示为一系列微分方程,从而便于控制器的设计和控制器参数的调整。
2. 控制算法的设计控制算法是磁悬浮控制系统的关键部分,无论是经典的PID控制算法,还是先进的自适应控制算法,都需要针对具体情况进行设计。
比如,对于磁悬浮列车,由于其速度快、重量轻、摩擦小等特点,采用传统的PID控制算法可能存在一些性能不佳的问题。
因此,一些高级控制算法,如模糊控制、神经网络控制、自适应控制等,已经应用到了磁悬浮列车的控制系统中。
三、磁悬浮控制系统的实现磁悬浮控制系统的实现是将设计好的控制器标准化和生产。
磁悬浮列车控制系统的设计与优化随着现代科技的飞速发展,交通运输业也在不断革新和变革中。
其中,科技最为先进的交通工具之一就是磁悬浮列车。
其以高速、舒适、环保的特点,已成为未来交通运输的重要发展方向。
而磁悬浮列车的控制系统,则是磁悬浮列车能否正常运行和保持稳定的关键所在。
本文将从磁悬浮列车控制系统的设计与优化两个方面入手,来探讨如何实现磁悬浮列车的高效、安全、稳定运行。
一、磁悬浮列车控制系统设计1、系统整体架构磁悬浮列车控制系统包括GUID(车辆控制部分)、TMS(列车监控与信号控制系统)、ATS(自动列车停车系统)等组成部分。
其中,GUID主要控制列车的运行、悬浮和制动等功能;TMS 则是对整个线路进行监控和控制,并发送相关信号控制车辆运行;ATS则是对列车停车进行控制和安全保障。
这三个部分相互配合,才能让整个磁悬浮列车系统运行如常。
2、控制系统设计原则在磁悬浮列车控制系统的设计中,需要遵循以下原则:(1)安全性原则。
磁悬浮列车的运行中,安全永远是第一位的。
因此,在设计控制系统时,需要充分考虑安全策略,并设置安全保护机制。
(2)高效性原则。
磁悬浮列车是高速运行的交通工具,因此,在设计控制系统时,需要考虑全方位控制,并提高整个系统的运行效率。
(3)灵活性原则。
磁悬浮列车的控制系统需要针对不同线路、车辆和客流量等因素,进行灵活的调整和配合,才能最大限度地发挥其作用。
3、控制系统设计流程控制系统的设计流程,一般包括三个部分:(1)需求分析。
通过对磁悬浮列车的使用情况、客流量、线路参数和环境特点等进行分析和评估,明确设计控制系统的需求和目标。
(2)方案设计。
根据需求分析,设计出合适的磁悬浮列车控制系统方案,包括整体架构、硬件和软件系统等。
(3)实施与调试。
在系统设计完成后,需要进行实施和调试,确保各个部分协调运行、稳定性好、安全性强。
二、磁悬浮列车控制系统优化1、优化控制系统性能在磁悬浮列车控制系统的设计过程中,需要充分考虑控制系统的性能优化。
magnetic suspension technique本文介绍磁悬浮主轴系统的组成及工作原理,提出了一种在常规PID基础上的智能PID控制器的新型数字控制器设计。
其核心部件是TI公司的TMS320LF2407A,设计了五自由度磁悬浮主轴系统的硬件总体框图。
用C2000作为开发平台,设计在常规PID基础上的智能PID控制器。
理论分析结果表明:这种智能PID控制器能实现更好控制效果,达到更高的控制精度要求。
1 引言主动磁悬浮轴承(AMB,以下简称磁轴承)是集众多门学科于一体的,最能体现机电一体化的产品。
磁悬浮轴承与传统的轴承相比具有以下优点:无接触、无摩擦、高速度、高精度。
传统轴承使用时间长后,磨损严重,必须更换,对油润滑的轴承使用寿命会延长、但时间久了不可避免会出现漏油情况,对环境造成影响,这一点对磁悬浮轴承就可以避免,它可以说是一种环保型的产品。
而且磁轴承不仅具有研究意义,还具有很广阔的应用空间:航空航天、交通、医疗、机械加工等领域。
国外已有不少应用实例。
磁悬浮轴承系统是由以下五部分组成:控制器、转子、电磁铁、传感器和功率放大器。
其中最为关键的部件就是控制器。
控制器的性能基本上决定了整个磁悬浮轴承系统的性能。
控制器的控制规律决定了磁轴承系统的动态性能以及刚度、阻尼和稳定性。
控制器又分为两种:模拟控制器和数字控制器。
虽然国内目前广泛采用的模拟控制器虽然在一定程度上满足了系统的稳定性,但模拟控制器与数字控制器相比有以下不足:(一)调节不方便、(二)难以实现复杂的控制、(三)不能同时实现两个及两个以上自由度的控制、(四)互换性差,即不同的磁悬浮轴承必须有相对应的控制器、(五)功耗大、体积大等。
磁轴承要得到广泛的应用,模拟控制器的在线调节性能差不能不说是其原因之一,因此,数字化方向是磁轴承的发展趋势。
同时,要实现磁轴承系统的智能化,显然模拟控制器是难以满足这方面的要求。
因此从提高磁轴承性能、可靠性、增强控制器的柔性和减小体积、功耗和今后往网络化、智能化方向发展等角度,必须实现控制器数字化。
.页脚 《Matlab仿真技术》 设计报告
题 目 磁悬浮系统建模及其PID控制器设计 专业班级 电气工程及其自动化 11**班 学 号 7 学生 ** 指导教师 ** 学院名称 电气信息工程学院
完成日期: 2014 年 5 月 7 日 .页脚
磁悬浮系统建模及其PID控制器设计 Magnetic levitation system based on PID controller simulation
摘 要 磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。 随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。本设计以PID控制为原理,设计出PID控制器对磁悬浮系统进行控制。 在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。 PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。目前大多数工业控制器都是PID控制器或其改进型。尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。
关键字:磁悬浮系统;PID控制器;MATLAB仿真 .页脚
一、 磁悬浮技术简介 1.概述: 磁悬浮是利用悬浮磁力使物体处于一个无摩擦、无接触悬浮的平衡状态,磁悬浮看起来简单,但是具体磁悬浮悬浮特性的实现却经历了一个漫长的岁月。由于磁悬浮技术原理是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化高新技术。伴随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进一步的研究,磁悬浮随之解开了其神秘一方面。 1900年初,美国,法国等专家曾提出物体摆脱自身重力阻力并高效运营的若干猜想--也就是磁悬浮的早期模型。并列出了无摩擦阻力的磁悬浮列车使用的可能性。 然而,当时由于科学技术以及材料局限性磁悬浮列车只处于猜想阶段,未提出一个切实可行的办法来实现这一目标。 1842年,英国物理学家Earnshow就提出了磁悬浮的概念,同时指出:单靠永久磁铁是不能将一个铁磁体在所有六个自由度上都保持在自由稳定的悬浮状态。 1934年,德国的赫尔曼·肯佩尔申请了磁悬浮列车这一的专利。 在20世纪70、80年代,磁悬浮列车系统继续在德国蒂森亨舍尔测试和实施运行。德国开始命名这套磁悬浮系统为“磁悬浮”。 1966年,美国科学家詹姆斯·鲍威尔和戈登·丹比提出了第一个具有实用性质的磁悬浮运输系统。 1970年代以后,随着世界工业化国家经济实力的不断加强,为提高交通运输能力以适应其经济发展的需要,德国、日本、美国、加拿大、法国、英国等发达国家相继开始筹划进行磁悬浮运输系统的开发。 2009年时,国外研究的热点是磁悬浮轴承和磁悬浮列车,而应用最广泛的是磁悬浮轴承。它的无接触、无摩擦、使用寿命长、不用润滑以及高精度等特殊的优点引起世界各国科学界的特别关注,国外学者和企业界人士都对其倾注了极大的兴趣和研究热情。
2. 磁悬浮技术的应用及展望 20世纪60年代,世界上出现了3个载人的气垫车试验系统,它是最早对磁悬浮列车进行研究的系统。随着技术的发展,特别是固体电子学的出现,使原来十分庞大的控制设备变得十分轻巧,这就给磁悬浮列车技术提供了实现的可能。1969年,德国牵引机车公司的马法伊研制出小型磁悬浮列车模型,以后命名为TR01型,该车在1km轨道上的时速达165km,这是磁悬浮列车发展的第一个里程碑。在制造磁悬浮列车的 .页脚
角逐中,日本和德国是两大竞争对手。1994年2月24 日,日本的电动悬浮式磁悬浮列车,在宫崎一段74km长的试验线上,创造了时速431km的日本最高纪录。1999年4月,日本研制的超导磁悬浮列车在试验线上达到时速552km。德国经过近20年的努力,技术上已趋于成熟,已具有建造运用的水平。原计划在汉堡和柏林之间修建第一条时速为400km的磁悬浮铁路,总长度为248km,预计2003年正式投入营运。但由于资金计划问题,2002年宣布停止了这一计划。 我国对磁悬浮列车的研究工作起步较晚,1989年3月,国防科技大学研制出我国第一台磁悬浮试验样车。1995年,我国第一条磁悬浮列车实验线在西南交通大学建成,并且成功进行了稳定悬浮、导向、驱动控制和载人等时速为300km的试验。西南交通大学这条试验线的建成,标志我国已经掌握了制造磁悬浮列车的技术。然而,2001年3月13.8km的磁悬浮列车开始营运,标志着我国成为世界上第一个具有磁悬浮运营铁路的国家。
3. 磁悬浮系统的结构 3.1 系统组成 本设计所使用的磁悬浮实验装置系统,是由固高科技所生产的磁悬浮实验装置GML1001。此磁悬浮实验装置由LED光源、电磁铁、光电传感器、功放模块、模拟量控制模块、数据采集卡和被控对象(钢球)等元器件组成,其结构简单,实验控制效果直观明了,极富有趣味性。它是一个典型的吸浮式悬浮系统。此系统可以分为磁悬浮实验本体、电控箱及由数据采集卡和普通PC机组成的控制平台等三大部分。系统组成主要由所需设计的PID控制器,以电磁铁为执行器,小球位置传感器和被控对象钢球组成,系统框图如图1所示。
PID控制器执行器被控对象(过程)
传感器
偏差测量值被控参数给定值+-
控制信号控制量
图1 磁悬浮控制系统框图 3.2 磁悬浮实验本体 电磁铁绕组以一定的电流或者加上一定的电压会产生电磁力,控制电磁铁绕组中的电 .页脚
流或者绕组两端的电压,使之产生的电磁力与钢球的重量相平衡,钢球就可以悬浮在空中而处于平衡状态。但是这种平衡状态是一种不稳定平衡。此系统是一开环不稳定系统。主要有以下几个部分组成:箱体、电磁铁、传感器。
3.3 磁悬浮实验电控箱 电控箱安装有如下主要部件:直流线性电源、传感器后处理模块、电磁铁驱动 模块、空气开关、接触器、开关、指示灯等电气元件。
3.4 磁悬浮实验平台 与IBM PC/AT机兼容的PC机,带PCI总线插槽,PCI1711数据采集卡及其驱动程序演示实验软件。 磁悬浮系统是一个典型的非线性开环不稳定系统。电磁铁绕组以一定的电流或者加上一定的电压会产生电磁力,控制电磁铁绕组中的电流或电压,使之产生的电磁力与钢球的重力相平衡,钢球就可以悬浮在空中而处于平衡状态。但是这种平衡状态是一种开环不稳定的平衡,这是由于电磁铁与钢球之间的电磁力大小与它们之间的距离的平方成反比,只要平衡状态稍微受到扰动(如:加在电磁铁线圈上的电压产生脉动、周围的震动等),就会导致钢球掉下来或被电磁铁吸住,不能稳定悬浮,因此必须对系统实现闭环控制。由LED光源和传感器组成的测量装置检测钢球与电磁铁之间的距离变化,当钢球受到扰动下降,钢球与电磁铁之间的距离增大,传感器感受到光强的变化而产生相应的变化信号,经(数字或模拟)控制器调节、功率放大器放大处理后,使电磁铁控制绕组中的控制电流相应增大,电磁力增大,钢球被吸回平衡位置。 .页脚
二、 磁悬浮球系统的工作原理 磁悬浮控制系统由铁心、线圈、光位移传感器、控制器、功率放大器和被控对象(钢球)等元器件组成。它是一个典型的吸浮式悬浮系统。系统开环结构如图2所示。
电磁铁
传感器激光发生器
Ux
mgF
图2系统开环结构图 电磁铁绕组以一定的电流会产生电磁力,控制电磁铁绕组中的电流,使之产生的电磁力与钢球的重力相平衡,钢球就可以悬浮于空中而处于平衡状态。但是这种平衡是一种不稳定平衡,这是由于电磁铁与钢球之间的电磁力的大小与它们之间的距离)(tx成
反比,只要平衡状态稍微受到扰动(如:加在电磁铁线圈上的电压产生脉动、周围的振动、风等),就会导致钢球掉下来或被电磁铁吸住,因此必须对系统实现闭环控制。由电涡流位移传感器检测钢球与电磁铁之间的距离xt变化,当钢球受到扰动下降,钢
球与电磁铁之间的距离xt增大,传感器输出电压增大,经控制器计算、功率放大器放大处理后,使电磁铁绕组中的控制电流相应增大,电磁力增大,钢球被吸回平衡位置,反之亦然。 .页脚
三、控制对象的运动方程 在物理法则允许条件下,建立磁悬浮系统的数学模型,假设 A1 铁芯是磁饱和的,没有磁滞现象; A2 铁芯的磁通率无限大 A3 无视铁芯中的生成电流 A4 线圈中的电磁感应系数在平衡点附近是常数
在以上假设条件下,利用浮球的运动方程,磁铁引力,电路方程式等,建立以下等式:
)()(22tfMgdttxdM (1)
20
2))(())(()(xtxXtiIktf
(2)
)())(()(teEtiIRdttdiL (3) 这里,M表示铁球的质量,X表示电磁铁和铁球的定常间隙(气隙),)(tf是电磁铁的引力,k,0x是对电磁体实际特性的修正参数,对应的参数值由实验辨识获得。RL,是电磁铁的电磁感应系数,阻抗。对于(2)式的非线性表示,利用泰勒级数做近
似处理得到:
)()()()(202tiKtxKxXkItfix (4)
30
2)(2xXkIKx 20)(2xXkIKi (5)
在平衡点),,,(0ExXI处,有 20
2)(xXkIMg (6)
ERI (7) 再结合(1)和(4)可得
)()()(22tiKtxKdttxdMix
)()()(tetRidttdiL