基于STM32的舵机控制系统
- 格式:doc
- 大小:2.78 MB
- 文档页数:51

基于STM32F4的四轴航拍飞行器摘要本设计是基于STM32F4的四轴航拍平台。
以STM32F407为控制核心,四轴飞行器为载体,辅以云台的航拍系统。
硬件上由飞控电路,电源管理,通信模块,动力系统,机架,云台伺服系统组成。
算法上采用简洁稳定的四元数加互补滤波作为姿态解算算法,PID作为控制器,实现飞行,云台增稳等功能。
具有灵活轻盈,延展性,适应性强好等特点。
1.引言四轴飞行器是一种利用四个旋翼作为飞行引擎来进行空中飞行的飞行器。
进入20世纪以来,电子技术飞速发展四轴飞行器开始走向小型化,并融入了人工智能,使其发展趋于无人机,智能机器人。
四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。
四轴飞行器的平衡控制系统由各类惯性传感器组成。
在制作过程中,对整体机身的中心、对称性以及电机性能要求较低,这也正是制作四轴飞行器的优势所在,而且相较于固定翼飞机,四轴也有着可垂直起降,机动性好,易维护等优点。
在实际应用方面,四轴飞行器可以在复杂、危险的环境下可以完成特定的飞行任务,也可以用于监控交通,环境等。
比如,在四轴飞行器上安装甲烷等有害气体的检测装置,则可以在高空定点地检测有害气体;进入辐射区检查核设施;做军事侦察;甚至搬运材料,搭建房屋等等。
本设计利用四轴搭载云台实现航拍任务,当然经过改装也可以执行其他任务。
本设计主要研究了四轴飞行器的姿态结算和飞行控制,并设计制作了一架四轴飞行器,对关键传感器做了标定,并利用用matlab分析数据,设计算法,还进行了单通道平衡试验调试,进行试飞实验取得了一定的效果。
2.系统方案本设计采用STM32F4作为核心处理器,该处理器内核架构ARM Cortex-M4,具有高性能、低成本、低功耗等特点。
主控板包括传感器MPU6050电路模块、无线蓝牙模块、电机启动模块,电源管理模块等;遥控使用商品遥控及接收机。
控制芯片捕获接收机的PPM命令信号,传感器与控制芯片之间采用IIC总线连接,MCU与电调之间用PWM传递控制信号。

基于STM32的无刷直流电机控制系统研究一、本文概述随着现代工业技术的快速发展,无刷直流电机(Brushless DC Motor, BLDC)因其高效能、长寿命、低噪音等优点,在许多领域,如家电、电动汽车、航空航天等领域得到广泛应用。
然而,要想充分发挥无刷直流电机的优势,其控制系统的设计与实现显得尤为重要。
因此,本文旨在深入研究基于STM32的无刷直流电机控制系统的设计原理、实现方法以及性能优化,以期为无刷直流电机的更广泛应用提供理论支持和实践指导。
本文将介绍无刷直流电机的基本工作原理及其控制系统的组成,为后续研究奠定理论基础。
接着,将详细阐述基于STM32的无刷直流电机控制系统的硬件设计,包括电机驱动电路、电源电路、传感器电路等关键部分的设计和实现。
在此基础上,本文将重点讨论控制系统的软件设计,包括电机控制算法、运动控制策略以及保护策略等,以提升电机运行的稳定性和可靠性。
本文还将对基于STM32的无刷直流电机控制系统的性能进行优化研究,通过改进控制算法、优化硬件结构等方式,提高电机的运行效率、降低能耗,并提升系统的整体性能。
本文将通过实验验证所设计的控制系统的有效性和可靠性,为无刷直流电机的实际应用提供有力支持。
本文旨在全面、深入地研究基于STM32的无刷直流电机控制系统的设计、实现及性能优化,为无刷直流电机的广泛应用提供理论支持和实践指导。
通过本文的研究,期望能够为相关领域的研究人员和技术人员提供有益的参考和启示。
二、无刷直流电机控制理论基础无刷直流电机(Brushless DC Motor, BLDC)是一种通过电子换相器替代传统机械换向器的直流电机。
它结合了直流电机和同步电机的优点,具有高效、高转矩密度、低噪音和低维护成本等特点,因此在许多应用中逐渐取代了传统的有刷直流电机。
无刷直流电机主要由定子、转子、电子换相器和位置传感器组成。
定子上的绕组通过电子换相器供电,形成旋转磁场。
转子上的永磁体在这个旋转磁场的作用下转动,实现电能到机械能的转换。
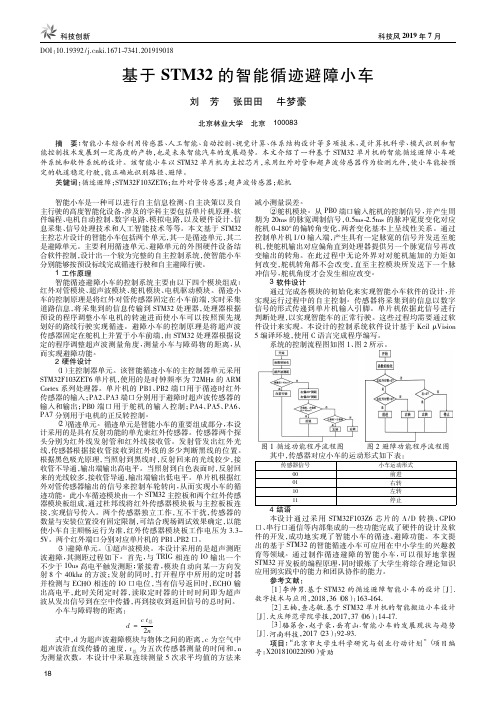
DOI:10.19392/j.cnki.1671-7341.201919018基于STM32的智能循迹避障小车刘芳张田田牛梦豪北京林业大学北京100083摘要:智能小车综合利用传感器、人工智能、自动控制、视觉计算、体系结构设计等多项技术,是计算机科学、模式识别和智能控制技术发展到一定高度的产物,也是未来智能汽车的发展趋势。
本文介绍了一种基于STM32单片机的智能循迹避障小车硬件系统和软件系统的设计。
该智能小车以STM32单片机为主控芯片,采用红外对管和超声波传感器作为检测元件,使小车能按预定的轨道稳定行驶,能正确地识别路径、避障。
关键词:循迹避障;STM32F103ZET6;红外对管传感器;超声波传感器;舵机智能小车是一种可以进行自主信息检测、自主决策以及自主行驶的高度智能化设备,涉及的学科主要包括单片机原理、软件编程、电机自动控制、数字电路、模拟电路,以及硬件设计、信息采集、信号处理技术和人工智能技术等等。
本文基于STM32主控芯片设计的智能小车包括两个单元,其一是循迹单元,其二是避障单元。
主要利用循迹单元、避障单元的外围硬件设备结合软件控制,设计出一个较为完整的自主控制系统,使智能小车分别能够按预设标线完成循迹行驶和自主避障行驶。
1工作原理智能循迹避障小车的控制系统主要由以下四个模块组成:红外对管模块、超声波模块、舵机模块、电机驱动模块。
循迹小车的控制原理是将红外对管传感器固定在小车前端,实时采集道路信息,将采集到的信息传输到STM32处理器,处理器根据预设的程序调整小车电机的转速进而使小车可以按照预先规划好的路线行驶实现循迹。
避障小车的控制原理是将超声波传感器固定在舵机上并置于小车前端,由STM32处理器根据设定的程序调整超声波测量角度,测量小车与障碍物的距离,从而实现避障功能。
2硬件设计(1)主控制器单元。
该智能循迹小车的主控制器单元采用STM32F103ZET6单片机,使用的是时钟频率为72MHz的ARMCortex系列处理器。

stm32f412ret6例子STM32F412RET6示例STM32F412RET6是一款由STMicroelectronics开发的基于ARM Cortex-M4内核的微控制器。
它具有丰富的外设和功能,适用于各种应用场景。
以下是几个STM32F412RET6的示例,展示了该微控制器的某些功能和应用领域。
1. LED闪烁示例:通过使用STM32F412RET6的GPIO外设,可以轻松地控制外部LED的闪烁。
通过编写简单的代码,可以配置GPIO引脚为输出模式,并按照一定的时间间隔设置引脚的电平状态,从而实现LED的闪烁效果。
这种示例通常是用于验证开发板的基本功能。
2. 蜂鸣器控制示例:使用STM32F412RET6的定时器和GPIO外设,可以轻松地控制外部蜂鸣器的鸣叫。
通过配置定时器的时间间隔和占空比,可以产生不同频率和持续时间的脉冲信号,从而控制蜂鸣器的声音。
这种示例通常用于提醒、报警等场景。
3. 串口通信示例:STM32F412RET6支持多个串口接口,如USART、UART等。
通过配置串口参数,并编写相应的发送和接收代码,可以实现与其他设备的串口通信。
这种示例通常用于与外部设备进行数据交互,如传感器、显示屏、通信模块等。
4. PWM信号生成示例:STM32F412RET6的定时器外设提供了丰富的PWM输出功能。
通过配置定时器的工作模式、频率和占空比,可以生成不同电平和周期的PWM信号。
这种示例通常用于控制电机、舵机、LED调光等应用。
5. ADC采样示例:STM32F412RET6配备了多个ADC通道,用于模拟信号的采样与转换。
通过配置ADC参数,并编写相应的代码,可以实现模拟信号的采样和转换成数字形式。
这种示例通常用于传感器的数据采集和处理。
STM32F412RET6是一款功能强大且灵活的微控制器,具有丰富的外设和功能。
通过以上示例,我们可以了解到它在LED控制、蜂鸣器控制、串口通信、PWM信号生成和ADC采样等方面的应用。

单片机舵机控制程序论文题目:基于单片机的舵机控制程序设计第一章:引言(介绍背景、意义和目的)舵机是一种用来控制机械运动的装置,广泛应用于各种自动控制系统中。
作为一种常见的终端执行元件,舵机的控制方式对系统的性能和准确性有很大的影响。
因此,设计一种高效、精准的舵机控制程序成为研究的重点。
第二章:相关技术介绍(介绍舵机的原理、分类和常用控制方法)本章将详细介绍舵机的工作原理和分类。
首先介绍舵机的基本构造和工作原理,其中包括电机、减速机、角度传感器和控制电路等。
接着介绍舵机的分类,包括开环控制和闭环控制两种方式。
最后,对常用的舵机控制方法进行详细讲解,包括位置式控制和速度式控制等。
第三章:舵机控制程序设计(详细介绍舵机控制程序的设计方法和步骤)本章将详细介绍舵机控制程序的设计方法和步骤。
首先,介绍如何选择适当的舵机控制芯片和开发环境。
然后,详细讲解舵机控制程序的编写过程,包括初始化舵机、设置舵机参数以及控制舵机运动等。
最后,通过实例说明舵机控制程序设计的实际操作过程。
第四章:实验结果与分析(通过实验验证舵机控制程序的性能和准确性)本章将通过实际实验来验证所设计的舵机控制程序的性能和准确性。
首先介绍实验所需的硬件设备和软件环境。
然后,详细记录实验过程中的实测数据,并进行数据分析和结果展示。
最后,对实验结果进行评价和讨论,说明所设计的舵机控制程序的优点和不足之处,并提出改进和优化的建议。
结论本论文通过对舵机的原理、分类和控制方法的介绍,设计了一种高效、精准的舵机控制程序。
通过实验验证,结果表明所设计的舵机控制程序具有良好的性能和准确性。
然而,舵机控制程序的设计仍然有一些局限性,需要进一步研究和改进。
相信随着技术的进步和舵机控制程序的不断优化,舵机在各种自动控制领域的应用将更加广泛和成熟。
第一章:引言舵机是一种常见的终端执行元件,它广泛应用于各种自动控制系统中,如机器人、无人机、机械臂等。
舵机的控制方式对于系统的性能和准确性有着重要的影响。
基于STM32单片机的新农业智能控制系统设计作者:邹双鸾张梦瑶陈晓登李桂梅来源:《电脑知识与技术》2023年第32期关键词:温湿度传感器;光照传感器;云平台;智能控制:远程监控:Lora中图分类号:TP391 文献标识码:A文章编号:1009-3044(2023)32-0110-05农业是我国的传统产业,也是国家支柱产业之一。
相关研究表明:我国农业劳动力成本日趋增高,农业劳动力老龄化与短缺问题逐渐凸显,农业智能化的需求日益增加。
而农作物的产量与温度、湿度、光照强度、CO₂浓度息息相关。
为能够根据农作物不同生长周期所需的环境进行智能调整,满足其合适的生长环境,提高农作物产量和农业管理的效率,笔者设计了新农业智能控制系统。
1 硬件设计本控制系统由单片机模块、空气温度监测模块、土壤湿度监测模块、光照强度监测模块、CO₂监测模块、通信模块、驱动模块和显示与控制模块共8个模块组成,其系统框图如图1所示。
1.1 单片机模块单片机选用STM32F103,STM32F103微控制器具有高性能、丰富的外设和接口、灵活的存储容量选择、低功耗特性以及安全功能等特点。
功能较为完善,可以满足此次设计需要。
1.2 空气温度监测模块DS18B20 是一种“单总线”接口的温度传感器。
DS18B20通过测量温度对其内部器件电阻值,从而实现温度的检测。
DS18B20内置有一个温度感应器和一个处理模块,当温度发生变化时,感应器的电阻值也会发生变化,这个变化被传递给处理模块,经过一系列运算之后最终以数字信号的形式输出。
整个过程由芯片内部自动完成,当系统需要获取传感器的数据时,需要从信号引脚DQ输入特定的指令,传感器会对指令进行解析,并向DQ引脚输出相应的温度数值。
1.3 土壤湿度监测模块采用YL-69土壤湿度传感器,其原理为湿敏电容,当环境的湿度发生改变时,会使得湿敏电容存在环境中的介质发生改变,导致湿敏电容中的电容数值产生变化,电容的数值正比于湿度值。
stm32驱动电机的工作原理一、引言电机作为现代工业中不可或缺的设备之一,其驱动方式多种多样,其中一种常见的驱动方式是使用stm32单片机来驱动电机。
本文将详细介绍stm32驱动电机的工作原理。
二、stm32驱动电机的基本原理stm32单片机作为一种高性能、低功耗的微控制器,具有丰富的外设和强大的计算能力。
在驱动电机时,stm32通过引脚控制电机的正反转、速度和位置等参数。
具体的工作原理如下:1. 电机的正反转控制stm32通过控制引脚的电平可以实现电机的正反转。
通过将引脚设置为高电平或低电平,可以改变电机的转向。
通常情况下,将引脚设置为高电平表示正转,低电平表示反转。
2. 电机的速度控制stm32通过PWM(脉冲宽度调制)信号可以实现对电机速度的控制。
通过改变PWM信号的占空比,可以调整电机的转速。
占空比越大,电机转速越快;占空比越小,电机转速越慢。
3. 电机的位置控制stm32可以通过编码器等传感器获取电机的位置信息,并根据设定的目标位置来控制电机的运动。
通过不断地检测电机的位置,并进行反馈控制,stm32可以精准地控制电机的运动,实现各种复杂的运动轨迹。
三、stm32驱动电机的具体实现步骤stm32驱动电机的具体实现步骤如下:1. 初始化引脚和外设需要初始化stm32的GPIO引脚和定时器等外设。
GPIO引脚用来控制电机的正反转,定时器用来生成PWM信号。
2. 设置引脚电平根据所需的转向,设置GPIO引脚的电平。
通过改变引脚的输出电平,可以实现电机的正反转。
3. 设置PWM信号根据所需的转速,设置定时器的计数值和占空比。
通过改变计数值和占空比,可以实现不同的转速控制。
4. 控制电机运动根据需要控制电机的位置,可以通过编码器等传感器获取电机的实际位置,并与目标位置进行比较。
根据比较结果,调整PWM信号和引脚电平,控制电机的运动,使其逐渐接近目标位置。
四、总结通过stm32驱动电机的工作原理可以看出,stm32单片机作为一种强大的微控制器,具有丰富的外设和灵活的控制方式,可以实现对电机的精确控制。
《一种基于STM32单片机的多功能智能家居控制系统》篇一一、引言随着科技的进步和人们生活水平的提高,智能家居系统逐渐成为现代家庭的重要组成部分。
本文将介绍一种基于STM32单片机的多功能智能家居控制系统,该系统通过集成各种传感器和执行器,实现了对家庭环境的智能监控和控制。
二、系统概述本系统以STM32单片机为核心控制器,通过与各种传感器和执行器进行连接,实现对家庭环境的实时监控和控制。
系统具有以下功能:1. 家庭环境监测:包括温度、湿度、光照、空气质量等参数的实时监测。
2. 智能控制:通过手机APP或语音控制,实现对家庭电器的远程控制和定时开关。
3. 安全防护:通过安装烟雾传感器、燃气传感器等设备,实现家庭安全的实时监控和预警。
4. 能源管理:通过智能调节家电设备的运行状态,实现能源的合理利用和节约。
三、硬件设计本系统的硬件设计主要包括STM32单片机、传感器模块、执行器模块、通信模块等部分。
1. STM32单片机:作为核心控制器,负责整个系统的运算和控制。
2. 传感器模块:包括温度传感器、湿度传感器、光照传感器、烟雾传感器、燃气传感器等,用于实时监测家庭环境参数。
3. 执行器模块:包括继电器模块、电机驱动模块等,用于控制家用电器的开关和运行状态。
4. 通信模块:包括Wi-Fi模块、蓝牙模块等,实现与手机APP或语音控制设备的通信。
四、软件设计本系统的软件设计主要包括操作系统、驱动程序、应用程序等部分。
1. 操作系统:采用嵌入式实时操作系统,保证系统的稳定性和实时性。
2. 驱动程序:包括传感器驱动程序、执行器驱动程序、通信驱动程序等,实现硬件设备的控制和数据传输。
3. 应用程序:包括家庭环境监测程序、智能控制程序、安全防护程序、能源管理程序等,实现系统的各种功能。
五、系统实现本系统的实现过程主要包括传感器数据采集、数据处理、控制指令发送等部分。
1. 传感器数据采集:通过传感器模块实时采集家庭环境参数,如温度、湿度、光照等。
I 摘 要 随着越来越多的高科技产品逐渐融入了日常生活中,舵机的控制系统发生了巨大的变化。单片机、C语言等前沿学科的技术的日趋成熟与实用化,使得舵机的控制系统有了新的的研究方向与意义。本文描述了一个由STM32微处理器、舵机、LCD显示器、键盘等模块构成的,提供基于STM32的PWM信号舵机的控制系统。该系统采用STM32微处理器为核心,在MDK的环境下进行编程,根据键盘的输入,使STM32产生周期性PWM信号,用此信号对舵机的速度及转角进行控制,并且通过LCD显示出数据。结果表明该系统具有结构简单、工作可靠、精度高等特点. 关键词:STM32微处理器;舵机系统;LCD显示;PWM信号 II
Abstract As well as the high-tech products gradually integrated into the daily life, servo control system has undergone tremendous changes. SCM and C language of the frontier disciplines such mature technology and practical,Make steering control system is a new research direction and meaning. This paper describes a STM32 microprocessors, steering, LCD display and keyboard, etc. Based on the STM32 servo control system of PWM signal,This system uses STM32 microprocessor as the core, MDK in the environment, according to the keyboard input programming, STM32 produce periodic PWM signal, with this signal to the velocity and Angle of steering gear control, and through the LCD display data. The features of the simple hardware, stable operation and high precision are incarnated in the proposed system. Keywords: STM32 microprocessors; Steering system; LCD display;pulse width modulation signal III
目 录 第1章 绪 论 ..................................................................................................................... 1 1.1 课题背景 .................................................................................................................... 1 1.2 课题的研究展望 ........................................................................................................ 2 课题任务及要求 ............................................................................................................... 2 1.3 课题内容及安排 ........................................................................................................ 3
第2章 硬件设计 ................................................................................................................. 4 2.1 STM32微处理单元 .................................................................................................... 4 2.2 舵机............................................................................................................................. 8 2.3 LCD显示器 ................................................................................................................ 9 2.4 时钟电路的制作 ...................................................................................................... 10
第3章 软件设计 ............................................................................................................... 12 3.1 STM32固件库简介 .................................................................................................. 12 3.2 软件的总体设计 ...................................................................................................... 13 3.3 时钟初始化子程序 .................................................................................................. 14 3.4 I/O口初始化子程序 ................................................................................................. 16 3.5 PWM信号子程序 ..................................................................................................... 17 3.6 A/D转换初始化子程序 ............................................................................................ 18 3.7 LCD显示子程序 ...................................................................................................... 19
第4章 系统调试 ............................................................................................................... 21 4.1 调试方案 .................................................................................................................. 21 4.1.1 硬件调试方案 .................................................................................................... 21 4.1.2 软件调试方案 .................................................................................................... 21 4.2 故障调试及解决方法 .............................................................................................. 22 4.3 联调结果 .................................................................................................................. 22
结 论 ................................................................................................................................. 26 社会经济效益分析 ............................................................................................................. 27 参考文献 ............................................................................................................................. 28