六自由度平台
- 格式:doc
- 大小:243.50 KB
- 文档页数:9
(一)
六自由运动平台介绍
六自由度液压平台技术参数
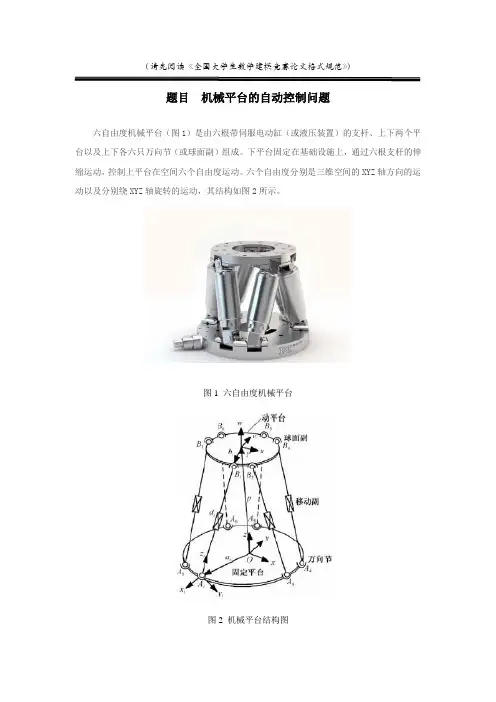
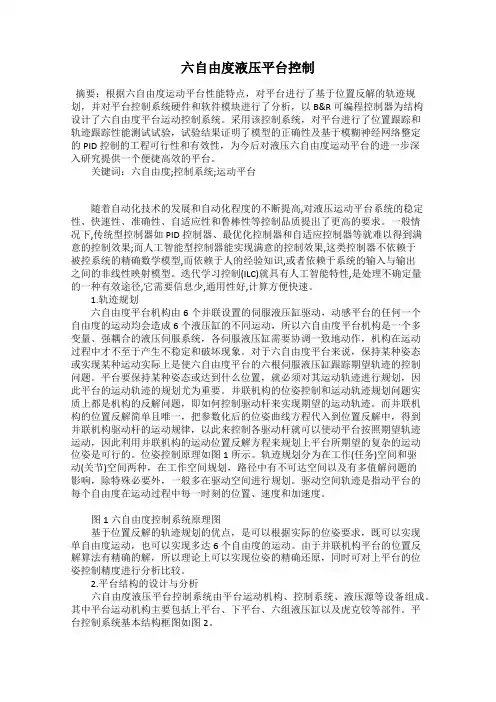
六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间六个自由度(α,β,γ, X,Y,Z)的运动,从而可以模拟出各种空间运动姿态。六自由度运动平台涉及到机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理等一系列高科技领域,因此六自由度运动平台是液压和控制领域水平的标志性象征。主要包括平台的空间运动机构、空间运动模型、液压系统、控制系统。
1 六自由度平台空间机构技术参数
六自由度平台结构效果图如图1所示。
图1 六自由度平台
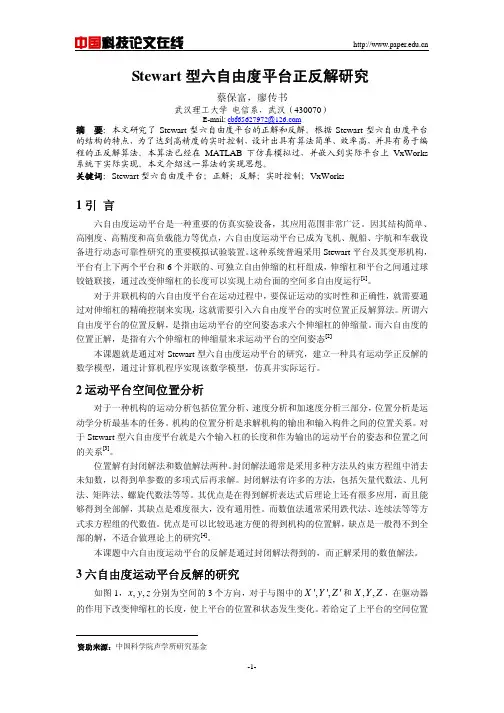
六自由度运动平台由上下平台和六个液压油缸组成。六个液压缸上端点两两组成上平台三个支点,六个液压缸下端点两两组成下平台三个支点。上下三个支点分别在假设的圆周上,并且是120o等分,既分别是两个等边三角形的顶点。根据不同的运动范围,油缸的行程和上下平台半径不同。结构如图2所示。
图2 六自由度平台结构图
根据标书要求,六自由度平台结构参数如下:
上平台半径: 0.8m; 下平台半径:0.85m ;
油缸最低行程时上下平台垂直距离:约1.17m;
油缸行程:±0.20m。
2 六自由度平台空间运动
空间运动的目标是实现平台在空间运动的三个姿态角度和三个平动位移,即俯仰、滚转、偏航、上下垂直运动、前后平移和左右平移,及六个姿态的复合运动姿态。而空间目标是通过六个液压缸的行程实现的,这就需要一个空间的运动模型完成空间运动的转换,假设空间运动的目标俯仰、滚转、偏航、上下垂直位移、前后平移和左右平移用α,β,γ,X,Y,Z表示,六个油缸的行程用L(i)(i=1、2、3、4、5、6)表示。整个运动模型如下:
L(i)=TT(α,β,γ,X,Y,Z)
其中,TT是一个空间转换矩阵模型。由此实时算出每一运动时刻液压油缸的行程。液压油缸的理论行程再通过D/A接口的转换,给出实际行程值。
根据平台的空间机构参数,空间运动参数如下:
位移 速度 加速度
俯仰 ±20o 22o/S 2弧度/S2
滚转 ±17o 22o/S 2弧度/S2
偏航 ±30o 22o/S 2弧度/S2
垂直升降 ±200mm 0.5m/S 0.5m/ S2
纵向位移 ±200mm 0.5m/S 0.5m/ S2
侧向位移 -200mm—+200mm 0.5m/S 0.5m/ S2
(二)
六自由度平台
多自由度运动控制
多自由度控制系统中,自由度最多为六自由度,并且六自由度运动控制难度最大,设备及系统最复杂,下面主要介绍我公司设计、生产的六自由度运动平台。
六自由度运动平台是由六支直线伺服电动缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只伺服电动缸(执行器)的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态,可广泛应用到各种训练模拟器中,如飞行模拟器、汽车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域中。在加工业可制成六轴联动机床、机器人等。
下图为六自由度运动平台的控制框图。从图中可看出,主控计算机通过六自由度数学模型对空间状态进行时时解算,将需要的空间状态和运动轨迹输入到主控计算机,通过空间状态解算程序完成对六根缸的运动位移和速度的计算,然后将解算结果送到多轴控制卡,经伺服驱动器送给伺服电机,伺服电机带动电动缸推动平台运动,实现上平台的空间运动状态。
六自由度运动平台的研制中,根据应用不同需要涉及机械、液压、电器、控制、计算机、传感器、空间运动数学模型、实时信号传输处理、图形显示、动态仿真等等一系列领域。
上图为六自由度在并联机床上的应用
汽车模拟驾驶器
本套基于伺服电动缸的六自由度运动平台,是为汽车模拟驾驶器配套生产的。目前,国内外研制开发的汽车模拟驾驶器六自由度运动平台,多为电液伺服控制的液压油缸作为驱动器,液压伺服系统可以承受大负载,原理简单,容易实现,但是控制难度大,而且需要油源泵站,对环境和场地都有严格的要求。而伺服电动缸,可以解决以上的这些问题。
(三)
六自由度平台底层架构(图)
该平台由集成控制与泵站组成,上图为底层结构图,六自由度运动平台能够上、下、左、右、前后左右平移方向运动,
载重量在吨级以下,运行稳定,动作可柔可钢。
(四)
六自由度六自由度运动平台定义- 六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动 用 途: 模拟出各种空间运动姿态,可广泛应用到各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域用途及特点:六自由度运动平台,由于有极为广阔的应用前景,近几年,引起了国内外科研、院校广泛的研究兴趣。
六自由度运动平台原理
是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态,可广泛应用到各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域,甚至可用到空间宇宙飞船的对接,空中加油机的加油对接中。在加工业可制成六轴联动机床、灵巧机器人等。由于六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等等一系列高科技领域,因而六自由度运动平台的研制变成了高等院校、研究院所在液压和控制领域水平的标志性象征。六自由度运动平台是液压及控制技术领域的皇冠级产品,掌握了它,在液压和控制领域基本上就没有了难题。 以下介绍它的开发过程,由于有极为广阔的应用前景,近几年,引起了国内外科研、院校广泛的研究兴趣。六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态,可广泛应用到各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域,甚至可用到空间宇宙飞船的对接,空中加油机的加油对接中。在加工业可制成六轴联动机床、灵巧机器人等。由于六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等等一系列高科技领域,因而六自由度运动平台的研制变成了高等院校、研究院所在液压和控制领域水平的标志性象征。
(五)
六自由度液压平台、三自由度液压平台、多自由度电动平台、抖振座椅、拟杆力系统等产品被广泛应用于仿真模拟系统中.
六自由度运动平台功能:
1.模拟飞机六个自由度的运动,包括俯仰、滚转、偏航、垂直升降、横向和纵向直线运动;
2.模拟飞机各种飞行条件的变化引起的运动,如大气扰动和武器发射等。
3.模拟着陆接地姿态和碰撞以及使用刹车时出现的运动;
4.模拟在接近真实飞机频率处的振动和抖振以及大气紊流在对应自由度上引进的抖振.
(六)
大型数字式六自由度运动平台的开发
一、概述
六自由度运动平台,由于有极为广阔的应用前景,近几年,引起了国内外科研、院校广泛的研究兴趣。六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态,可广泛应用到各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域,甚至可用到空间宇宙飞船的对接,空中加油机的加油对接中。在加工业可制成六轴联动机床、灵巧机器人等。由于六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等等一系列高科技领域,因而六自由度运动平台的研制变成了高等院校、研究院所在液压和控制领域水平的标志性象征。国外某大型液压公司的总部大厅里,向客人展示水平的第一个标志就是六自由度运动平台,笔者认为,六自由度运动平台是液压及控制技术领域的皇冠级产品,掌握了它,在液压和控制领域基本上就没有了难题。以下介绍它的开发过程
二、传统的伺服液压控制六自由度运动平台
到目前为止,世界上所有国家和研制单位,大型平台都无一例外的采用了液压伺服控制系统。国内以几所名牌大学的研究水平较高,其控制原理基本相同,六自由度平台单缸控制框图如下:
从图中可看出,主控计算机是完成空间状态的实时解算,然后将解算结果送到六个单缸控制器,经数/模转换后送给伺服放大器、伺服阀、伺服缸推动平台运动。伺服缸的位移和压力通过两只传感器并经模/数转换后送给计算机,完成闭环控制。该框图表示的是主动编程控制,如果是实时模拟控制,还需要在主控计算机前增加姿态信号输入装置,即用各种信号发生器模拟人的操作,输出表示空间状态的XYZ和αβγ信号。该伺服系统最大的难点是传递环节多、控制过于复杂、调试困难、可靠性差、伺服阀抗干扰抗污染能力弱、故障率高,因而国内尽管许多单位进行了研制,但大面积推广的却始终不多。
三、六自由度平台控制的空间状态解算
1.顺向解):即已知六根液压缸的长度,求解平台姿态,到目前为止,还没有直接中的的正解方程式,只能采用叠代方法,利用计算机快速运算的特点和上铰链的结构条件约束来逼近求解平台姿态。此为顺解,
2.反解(逆向解):描述一个刚体在空间旋转的姿势,最常使用的方法是定义三个欧拉角来表达,当刚体旋转至某一姿势下,此三个欧拉角即组成唯一的旋转矩阵,并借由旋转矩阵作坐标转换,便可求得刚体的绝对位置。
四、六自由度的速度协联控制
当给定空间状态后,可以分别算出六只缸的不同长度,为了让平台上的油缸在同一时间运动到新的位置,六只缸的运动速度是不相同的,这个问题的解决有两种方法,一是采用标准的协联控制器,该控制器需将油缸的运动长度数值送入,控制器能按所要求的时间,自动分配六只缸的运动速度,同时到达终点。第二种方法是自己编制运动速度方程,采用长度的最小公倍数方法分配速度,也可达到同样目的。
五、六自由度平台的全数字控制
性能先进、操作可靠的新型数字(液压)缸(已纳入“十五”攻关和国家重点新产品项目),作为六只控制缸。该数字缸取消了传统控制中的伺服阀、传感器、A/D转换和D/A转换等诸多环节,它是将传感器、数字阀等全部做到油缸内部,形成自动位置反馈和速度反馈。数字缸可以直接接受计算机发出的数字脉冲信号进行可靠的工作。脉冲频率代表数字缸运动速度,脉冲总数代表数字缸运动行程,一一对应,将复杂的闭环控制变成了简单的开环控制,它的控制框图和实际平台图照片所示如下: