最新滑模控制永磁同步电机调速系统
- 格式:doc
- 大小:712.00 KB
- 文档页数:29
永磁同步电机的控制方法
永磁同步电机的控制方法通常有以下几种:
1. 矢量控制:通过对永磁同步电机的电流和转子位置进行精确控制,实现精准的转速和转矩控制。
控制系统中包含了速度闭环和电流闭环控制,能够实现较高的响应速度和稳定性。
2. 直接转矩控制(DTC):在矢量控制的基础上,直接对电机转矩进行控制,通过实时监测电机状态和转矩需求,调整电机相电流和振幅,从而实现转矩控制和动态响应调节,避免了传统的速度环节和PI控制器,提高了系统的动态性能。
3. 感应机同步转矩控制(ISDT):利用感应机的电流矢量和同步电机之间的转子位置误差,实现对同步电机的转矩控制。
通过对比感应机和同步电机电磁转矩的误差,并根据误差进行调节,以实现精确转矩控制。
4. 滑模控制:利用滑模控制器,通过对滑动面进行设计,将同步电机的速度和位置误差纳入控制范围,实现速度闭环控制和稳定控制。
滑模控制方法具有较强的鲁棒性和快速响应特性,适用于对永磁同步电机的高性能控制要求。
5. 直接自适应控制(Direct Adaptive Control,DAC):基于模型引导技术,根据电机特性建立适应器模型,通过实时修正控制器参数,使得控制器能够自适应地处理电机的变化和非线性特性,以实现精准控制。
永磁同步电机控制系统发展现状及趋势摘要:永磁同步电机具有高功率密度、高效率和高可靠性等优点,在现代工业中应用广泛,相关控制理论得到了长远发展。
基于此,本文总结梳理了永磁同步电机控制系统的发展现状,然后论述了各控制系统的特点,最后展望了基于滑模控制的永磁同步电机控制系统的发展趋势,以期为未来永磁同步电机控制系统的进一步发展提供参考。
关键词:永磁同步电机;控制系统;发展现状;滑模控制;发展趋势引言:自永磁同步电机诞生以来,因其具有一系列优异特性,得到了广泛研究,同时伴随着永磁材料和半导体器件的发展,永磁同步电机获得了长足发展。
同时,随着相关控制理论的发展,永磁同步电机控制系统也随之进化,控制精度越来越高。
因而在现代工业中,永磁同步电机广泛应用于国民经济、航空航天等众多领域,发挥着重要作用。
相应的,随着技术产品的发展,对永磁同步电机的控制精度要求越来越高,故将各种先进控制方法应用的永磁同步电机的研究也不断涌现。
1永磁同步电机发展概况永磁同步电机与其他电动机最大不同之处在于励磁电流是依靠永磁体产生。
因此永磁同步电机具有以下优势[1]:(1)采用永磁材料,高速运行过程中发热少,避免了电机工作时转子发冷却难的问题,同时寿命也得到了提高;(2)永磁同步电机功率更高,可以达到97%左右;(3)永磁同步电机功率密度更高,在较小尺寸下即可实现较高的功率和转矩。
1.1永磁同步电机发展历史永磁同步电机的发展可总结为三个阶段[2]:(1)20世纪六七十年代,这个阶段由于稀土材料未得到充分开发,价格昂贵,导致永磁同步电机成本高昂,仅在航空航天等高要求行业得到应用;(2)20世纪八十年代,随着价格稍低的铅铁硼永磁材料的出现和电子控制技术的逐步成熟,永磁同步电机成本降低,同时控制相对容易实现,因而也逐步应用于民用领域;(3)自20世纪九十年代至今,伴随着永磁材料价格的降低、电力电子技术和微处理器技术的发展,永磁同步电机的驱动系统研发应用也得到了明显发展,应用领域进一步扩大,尤其是近十年,永磁同步电机已经成为国民经济中电机驱动系统的第一选择。
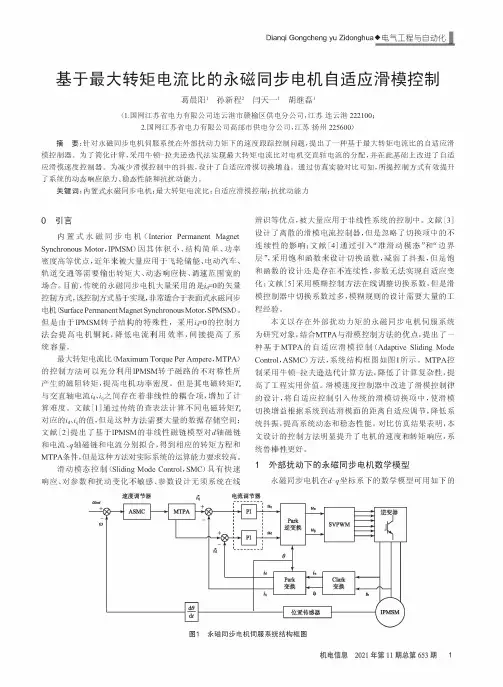
基于最大转矩电流比的永磁同步电机自适应滑模控制葛晨阳$孙新程!闫天一#胡继磊#(1.国网江苏省电力有限公司连云港市赣榆区供电分公司,江苏连云港222100;2.国网江苏省电力有限公司高邮市供电分公司,江苏扬州225600)摘要:针对永磁同步电机伺服系统在外部扰动力矩下的速度跟踪控制问题,提出了一种基于最大转矩电流比的自适应滑 模控制器。
为了简化计算,采用牛顿!最大转矩电流比对电机交直轴电流的分配,在基础上改进了自适应滑模速度控制器。
为减少滑模控制中的抖振,设计了自适应滑模切换 ° 对比 ,提控制 有效提升了系统的动 应能力扰动力。
关键词: 永磁同步电机;最大转矩电流比;自适应滑模控制;抗扰动能力0引言内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor ,IPMSM )因其体积小、结构简单、功率度高等优点, 大应用于 电动、出转矩大、动 应 速 的°,统的永磁同步电机大采用的!>=0的控制,控制 于,适于 永磁同步电机(Surface Permanent Magnet Synchronous Motor ,SPMSM)。
于IPMSM 转的 ,采用!<=0的控制方提高电机 , 电流用, 提高了系 统 。
最大转矩电流比(Maximum Torque Per Ampere ,MTPA ) 的控制分利用IPMS M 转子磁路的对称性所的磁阻转矩,提高电机 度。
电磁转矩"e电流!>、!q在的 ,了计算难度。
文献[1] 统的查表法计算不同电磁转矩"e对应的!>、!q 的值,但是这种大的数据 空;文献⑵提出了基于IPMSM 的非线性磁链模型对d 轴磁链 电流、g 轴磁链和电流分别拟合,得到相应的转矩程和 MTPA 条件,这种对际系统的运算能力求较高。
滑动模态控制(Sliding Mode Control ,SMC )具有快速 响应、对参数扰动变化敏感、参数设计无须系统在线辨识等优点,被大量应用于非线性系统的控制中。
永磁同步电机快速高阶终端滑模控制童灵华【摘要】为了提高永磁同步电机(PMSM)调速系统的抗扰动能力,提出了一种基于改进趋近律的快速高阶终端滑模速度控制器.与常规的指数趋近律不同,改进的趋近律能够根据系统状态距离平衡点的远近自适应地调节趋近速度,从而实现在提高趋近速度的同时消除系统抖振.应用该方法设计了一种PMSM调速系统的高阶非奇异终端滑模速度控制器.仿真及试验结果表明,与传统的PI控制器相比,该算法提高了系统的鲁棒性和动态响应速度.【期刊名称】《电机与控制应用》【年(卷),期】2016(043)012【总页数】5页(P1-5)【关键词】永磁同步电机;PI控制;趋近律;高阶滑模控制【作者】童灵华【作者单位】国网浙江省电力公司宁海县供电公司,浙江宁海315600【正文语种】中文【中图分类】TM351永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)具有结构简单、体积小、效率高、功率密度高等优点,在高性能拖动与伺服系统中得到了广泛的应用。
但是,PMSM是一个多变量、强耦合的复杂非线性系统,采用传统的PID控制虽然在一定程度上能满足控制性能的需要,但当控制系统受到外界扰动的影响或电机内部参数发生变化时,传统的PID控制方法并不能满足实际的要求[1-2]。
为了解决传统PID控制存在的缺点,随着现代控制技术的发展,一些先进的控制算法逐步被应用于PMSM调速系统,诸如模型参考自适应控制、自抗扰控制、鲁棒控制、模糊控制和滑模控制等。
滑模控制(Sliding-Mode Control, SMC)由于响应速度快、对参数摄动及外部干扰有很强的鲁棒性,在不确定非线性系统的控制上得到了一定程度的应用[3-10]。
目前SMC所采用的滑模面主要有线性滑模面、积分滑模面、终端滑模面和非奇异终端滑模面等。
文献[11]采用积分滑模面提高系统的动态性能,但积分滑模在大的初始误差和干扰下容易产生积分饱和导致超调量大。
喏名L乃农别名阄2017,44 (10)新能源汽车技术I EMCA 电动汽车永磁同步电机滑模低速控制郭栋"2,吴琦"祁晓野#(1.辽宁工业大学电气工程学院,辽宁錦州121001;2.北京航空航天大学流体传动与控制技术研发中心,北京100191)摘要:针对采用永磁同步电机! = 〇矢量控制调速的电动汽车电机驱动控制系统,为了改善其抗负载扰动能力,并且当电动汽车速,能,构控制中的变指数趋近律进行改进,设计了一速度控制器。
为了构控制的,引人数来代数,同速度控制器中,数与的,了应速度的同系统的抗扰动能力。
,不同负载,速度控制的抗扰动能力,电动汽车低速的。
关键词:滑模变结构控制;永磁同步电机"电动汽车中图分类号:TM 301.2 文献标志码:A 文章编号:1673-6540(2017)10-0119-05Sliding Mode Low S peed Control of PMSM for Electric Vehicle *GUO Dong1,1,*$+!,QI Xiaoye2(1. School of Electrical Engineering,Liaoning University of Technology,Jinzhou 121001,China;2.R&D Centre of F luid Power Transmission&Control Technology,Beihang University,Beijing 100191,China)Abstract: Aiming at tlie m otor drive control system of electric vehicle for using permanent magnet synchronous motor witli vector control,in order to improve its capability of resisting load disturbance,and when the electric vehiclewas running at lowspeed,it could o utput large torcjue. A sliding mode speed controller was designed to improve theexponential reaching law of sliding mode variable structure control. In order to reduce chattering of t variable structure control, the saturation function was introduced instead of the sign function. At the same time,considering the hysteresis in sliding mode speed controller,the saturation function and the integral signal aremultiplied,so that the response speed could be improved and the disturbance rejection capability could be enhance Simulation results showed that when the load was changed,the sliding mode speed controller h which could made the electric vehicle output large torque at low speed.Key words: sliding mode variable structure control; permanent magnet synchronous motor (PMSM);electric vehicle0 ^P M S M)因其高功率密度、高效率等优势在电动汽车 了应用。
一种永磁同步电机的滑模控制钟义长【摘要】永磁同步电动机(PMSM)是一个多变量、非线性、强耦合的系统,传统的PID调节器不能满足高性能的控制要求。
本文在同步电机数学模型的基础上首先提出自适应的滑模观测器,以在静止坐标下的电压、电流为变量计算电机转速,并利用滑模变结构控制的方法对q轴电流进行检测,利用Lyapunov证明了方法的收敛性。
仿真结果表明:该方案比传统的PID控制具有超调小,过渡时间短、鲁棒性强的特点,表明了该策略的有效性。
%Permanent magnet synchronous motor (PMSM) is a multivariable nonlinear system with strong coupling. Traditional PID controller is widely used in PMSM system, but it can't meet the need of high performance. By using the voltage and current ofthe d-q coordinate, an adaptive sliding mode observer for estimating the speed of rotor is presented in this article and the q-axis current is measured on-line. The convergence condition is proved by laypunov theory. Simulation results show the improved performance with the advantages of fastness rapid response and good robustness is superior to the traditional PID con- troller.【期刊名称】《湖南工程学院学报(自然科学版)》【年(卷),期】2012(022)001【总页数】4页(P16-19)【关键词】永磁同步电机;滑模观测器;滑模变结构控制;在线检测【作者】钟义长【作者单位】湖南工程学院应用技术学院,湘潭411101【正文语种】中文【中图分类】TM3510 引言永磁同步电动机(PMSM)具有大的转矩惯性以及可靠性高、可控性能好、功率因数高等优点,被广泛用于各种交流伺服系统.随着现代控制技术的发展,控制理论在电机及其控制系统方面的研究和应用已经有了长足的发展[1,13],特别是非线性控制技术的不断完善,如何在伺服系统中设计出高性能,高品质的PMSM控制器成为了研究的热点.为了克服与解决电机运行中易受干扰、参数变化和负载扰动等不确定因素的影响,学者们采用了一些智能技术来对电机系统进行控制,如自适应控制[2-3]、神经网络和重复控制相结合[4-6]等.由于滑模变结构控制(SMC)具有对控制对象参数的变化以及扰动完全自适应的能力而且其在滑模面上高速的切换能力可保证系统在滑模运动阶段良好的动态性能等优点,所以在交流电机系统中引入变结构控制技术的案例也日益增多[7-9].本文在同步电机数学模型的基础上首先设计了一种自适应的滑模观测器,以αβ静止坐标系下的电机电压、电流作为为变量,得出等效反电势信号并利用其来计算电机的转速与位置.文中考虑到滑模中抖振信号的存在与对测量的影响,利用一截止频率可变的低通滤波器对反电势信号进行了滤波后并加以动态补偿.然后,利用滑模变结构控制,设计一个控制器对电动机的q轴电流进行在线检测,避免了单一电流检测元件所带来的误差,提高了对电机控制精度.同时文中对这些算法的收敛性利用Lyapunov方法进行了证明,并最后通过仿真验证了本文设计的可行性与有效性.1 滑模观测器设计1.1 观测器的提出表面式永磁同步电机,在两相静止αβ坐标系下,其数学模型可以表示为:由数学模型,设计滑模观测器模型此时定电流观测值与实际值之差.此时建立以定子电流误差的滑模面s系统满足观测器进入滑模状态.根据等价控制原理,在滑模面上有:S=˙s=0,即:(6)中eα,eβ为反电势,Δ(t)为扰动信号.通过对开关信号进行低通滤波,可以得到反电势的估计值为:(7)中ωc为低通滤波器的截止频率.估算出反电势之后,那么转子位置角度可由式(8)计算:考虑到低通滤波器的引入造成了相位延迟,通常的作法是在估算相位角的基础上加上一个补偿角予以修正,即:(9)中Δθ=arctan(ωr/ωc).这里采用文献[10]的方案,设计一个截止频率随转速变化的低通滤波器,其截止频率ωc=ωr/M,(M 取0.2~0.5),那么(9)式可以写成:1.2 稳定性分析2 变结构q轴电流检测在传统的交流电机矢量控制中,通常的作法是令id=0,首先将系统的转速误差经PI控制后得电流环的输入信号,并与系统经电流检测元件所检测到的iq电流作差(),用此作为控制量来控制电机绕组电压,从而实现对电机控制.期间的获取通常是先电流检测,再经过Clarke变换和Pack反变换得来,这就对检测元件的要求会很高,同时在电机参数变化时其抗干扰性也不是很强.作者在这里提出一种仅由位置状态就对iq电流进行在线检测的变结构滑模控制(SMC)方法来解决这一问题.永磁同步电机的运动方程[11]为:(13)中J为转动惯量,pn为极对数,ψf为永磁体磁链,Tl为负载转矩.基于(13)式,求取状态变量:由(21)中可以看出,x1中包含有ωr的信息.对于本文中的变结构滑模系统,若选于滑模运动的可达性条件为s所以就能确保系统的,即此时系统能进入滑模状态.3 仿真分析采用=0的矢量控制方法,建立如图1所示的控制系统来验证本文方案的正确性与可行性.电机参数:极对数2,定子电阻为3Ω,电感6mH,永磁体磁链0.85Wb,转动惯量0.001J/(kg·m2).PID控制参数如下:①速度环PI控制器:kp=5,ki=2;②q轴电流控制器:kp=8,ki=45;③d轴电流控制器:kp=1.5,ki=10;滑模增益k1=3×104.图1 系统控制原理图图2 ,电机的目标转速为300rad/s,在0.3s时加入5N·m的负载,在0.6s卸去负载.可以看出,系统的估计转速能快速地跟踪系统的实际输出,同时在突加、突缷负载时能准确地反应出系统的实际转速并且转速扰动变化比较小;同时,q轴电流在突加、突缷负载时抖动比较小,说明系统具有较强的鲁棒性.图2 电机转速、转速误差与q轴电流波形图3 ,本文方案与双闭环PID控制的比较.设定目标转速与扰动加入缷去的时间等条件与图2中的仿真一样,从这里可以看出,系统在PI控制下,在突加、突缷负载时转速有明显的波动,且要有一定的调节时间才能恢复,这说明抗扰动不是很好.而本文却能快速地恢复转速至目标转速,这就说明在抑制超调与抗干扰上明显优于PID控制技术.图3 两种控制方案速度响应4 结论本文针对永磁电机调速系统的特点,在电机数学模型的基础上设计出了一种自适应的滑模观测器,并对电机转子位置进行在线动态补偿,得到电机的转速;然后通过滑模变结构控制技术,通过电机转速的信息对q轴电流进行了检测,从而获得电机绕组的控制信号.仿真结果表明,本文的方案下的系统能准确地估计电机转速,具有超调小,过渡时间短、抗干扰性能好、鲁棒性强的特点,说明本文策略是有效性.参考文献【相关文献】[1]Macro T,Francesco P,Zhang D Q.Real-time Gaintuning of PI Controllers for High-performance PMSM Drives[J].IEEE Trans.on Industry Applications,2002,38(4):1018-1026.[2]刘志刚,李世华.基于永磁同步电机模型辨识与补偿的自抗扰控制器[J].中国电机工程学报,2008,28(24):118-123.[3]高扬,杨明,于泳,徐殿国.基于扰动观测器的PMSM交流伺服系统低速控制[J].中国电机工程学报,2005,25(22):125-129.[4]Lin F J,Lin C H.A Per manent Magnet Synchronous Motor Servo Drive Using Self-constructing Fuzzy Neural Net work Controller[J].IEEE Trans.On Energy Conversion,2003,19(1):66-72.[5]王少威,万山明,周理兵,黄声华.利用蚁群算法辨识PMSM伺服系统负载转矩和转动惯量[J].电工技术学报,2011,26(6):18-25.[6]Li X D,Chow T W S,Ho J K L,et al.Repetitive Learning Control of Nonlinear Continuous-time Systems Using Quasi-sliding Mode[J].IEEE Transactions on Control Systems Technology,2007,15(2):369-374.[7]吴春华,陈国呈,孙承波.基于滑模观测器的无传感器永磁同步电机矢量控制系统[J].电工电能新技术,2006,25(2):1-3,51.[8]张群,李宏,郑勇.一种新型滑模观测器的永磁同步电动机无传感器控制[J].微特电机,2011,(8):41-43,50.[9]王家军,王江,许镇琳.基于逆变器死区的永磁同步电动机系统的变结构控制[J].控制理论与应用,2002,19(4):579-582.[10]鲁文其,胡育文,杜栩杨,黄文新.永磁同步电机新型滑模观测器无传感器矢量控制调速系统[J].中国电机工程学报,2010,30(33):78-83.[11]黄佳佳,周波,李丹.滑模控制永磁同步电动机位置伺服系统抖振[J].电工技术学报,2009,24(11):41-47.[12]姚琼荟,黄继起,吴汉松.变结构控制系统[M].重庆:重庆大学出版社,1997.[13]基于电流控制环的参数自适应永磁同步电机研究[J].湖南工程学院学报(自科版),2011,21(1):9-12.。
永磁同步电机滑模控制的国内外研究随着电动汽车、风力发电和工业自动化等领域的迅猛发展,永磁同步电机作为一种高效、低噪音的电动机,受到了广泛关注。
而永磁同步电机的控制技术中,滑模控制因其对系统参数变化、外部扰动等因素具有较强的鲁棒性和抗干扰能力,成为了研究热点之一。
本文将围绕永磁同步电机滑模控制的国内外研究现状展开全面的分析和总结,以期为相关研究提供借鉴和参考。
一、国外研究现状1. 研究背景与意义在国外,永磁同步电机滑模控制相关研究已经取得了一系列重要的成果。
随着电动汽车市场的快速发展,美国、日本等国家的学者和企业对永磁同步电机的控制技术进行了深入研究,提出了许多具有重要实用价值的成果和技术方案。
2. 研究现状在永磁同步电机滑模控制研究方面,国外学者主要集中在滑模控制器设计、适用性分析和实验验证等方面展开深入研究。
他们提出了许多针对永磁同步电机特性的滑模控制器设计方法,包括基于模型的滑模控制、基于自适应方法的滑模控制等。
他们也通过仿真和实验验证等手段,验证了永磁同步电机滑模控制的有效性和鲁棒性。
3. 存在问题与展望然而,国外研究在永磁同步电机滑模控制方面仍存在一些问题,如对大功率、高速度永磁同步电机的滑模控制研究较少、对滑模控制参数设计方法的进一步优化等。
展望未来,国外学者希望能够通过更深入的研究,进一步提高永磁同步电机滑模控制的性能和适用性,为电动汽车等应用领域提供更好的控制方案。
二、国内研究现状1. 研究背景与意义在国内,永磁同步电机滑模控制研究也取得了一系列重要的成果。
随着国家对新能源汽车和高效电机的大力支持,国内学者和企业对永磁同步电机的控制技术进行了广泛而深入的研究,取得了一系列重要成果。
2. 研究现状国内研究主要集中在永磁同步电机滑模控制的理论基础研究、滑模控制器设计和应用性能验证等方面。
他们提出了一些针对永磁同步电机特性的滑模控制器设计方法,包括基于模型的滑模控制、基于自适应方法的滑模控制等,并开展了大量的仿真和实验验证工作,验证了滑模控制在永磁同步电机中的有效性和鲁棒性。
PMSM双闭环平滑非奇异终端滑模控制PMSM双闭环平滑非奇异终端滑模控制是一种电机控制算法,用于永磁同步电机(PMSM)的运动控制。
本文将对PMSM双闭环平滑非奇异终端滑模控制进行详细介绍。
PMSM是一种具有高效率、高功率密度、高转矩与转速控制能力的电机类型,被广泛应用于工业和汽车领域。
PMSM系统的非线性、耦合和扰动等因素使得其控制成为一项复杂的任务。
传统的PMSM控制方法包括矢量控制和直接转矩控制。
这些方法在快速响应和鲁棒性方面存在一定的局限性。
近年来,研究者们提出了一些新的控制策略来改善PMSM系统的性能。
PMSM双闭环平滑非奇异终端滑模控制是其中一种先进的控制策略。
它结合了滑模控制和模糊控制的优点,并克服了传统滑模控制的摆动问题和模糊控制的模糊化问题。
PMSM双闭环平滑非奇异终端滑模控制的主要思想是将转子电流和转子转矩作为内环控制量,将电机转速作为外环控制量,构建一个双闭环控制系统。
滑模控制器用于内环控制,模糊滑模控制器用于外环控制。
1. 建立PMSM的数学模型。
根据电机的物理特性和电路方程,建立PMSM的数学模型。
2. 设计滑模控制器。
根据PMSM的数学模型,设计合适的滑模控制器,用于控制转子电流和转子转矩。
4. 进行仿真和实验验证。
使用电机仿真软件和实验设备,对设计的控制系统进行仿真和实验验证,评估其性能和鲁棒性。
通过PMSM双闭环平滑非奇异终端滑模控制,可以实现PMSM系统的高性能控制。
与传统的控制方法相比,该控制方法具有更好的响应速度、抗扰性和鲁棒性。
它在许多应用场景下具有广泛的应用前景,包括工业机械、电动车辆和航空航天等领域。
尽管PMSM双闭环平滑非奇异终端滑模控制在PMSM系统的控制中取得了一定的成功,但仍然存在一些挑战和问题。
控制器参数的选择、模型误差的影响、系统抗干扰能力的改进等。
在今后的研究中,还需要进一步深入地研究和改进PMSM双闭环平滑非奇异终端滑模控制算法,以提高其性能和可靠性。
天津职业技术师范大学Tianjin University of Technology and Education毕业设计专业:自动化班级学号:自0902-11学生姓名:林建平指导教师:韩春晓教授二〇壹叁年六月天津职业技术师范大学本科生毕业设计滑模控制永磁同步电动机调速系统Sliding Mode Control for PMSM Drive System专业班级:自0902学生姓名:林建平指导教师:韩春晓教授学院:自动化学院2013年6月摘要对于转子直流励磁的同步电动机,若采用永磁体取代其转子直流绕组则相应的同步电动机就成为永磁同步电动机。
而永磁同步电动机具有结构简单,体积小、重量轻、损耗小、效率高、功率因数高等优点,主要用于要求响应快速、调速范围宽、定位准确的高性能伺服传动系统和直流电机的更新替代电机。
由于永磁同步电动机对内部振动很敏感,所以引入了滑模变结构控制控制策略(SMC)以提高系统的鲁棒性。
本文给出了一种变参数SMC方法,对SMC控制器进行设计并对其仿真和实验研究,该方案设计的SMC控制器表达式和PI控制一样简单,结果证明所设计的SMC控制器能有效的提高系统的鲁棒性和动态性。
关键词:PI控制;永磁同步电动机;SMC控制;鲁棒性ABSTRACTFor synchronous motor rotor DC excitation, synchronous motor with permanent magnet rotor if replaced the DC winding corresponding becomes the permanent magnet synchronous motor. The permanent magnet synchronous motor has the advantages of simple structure, small volume, light weight, low loss, high efficiency, high power factor, advantages, mainly for fast response, wide speed range, accurate positioning and high performance servo drive system and DC substitute motor. Permanent magnet synchronous motor is very sensitive to the vibration, so the sliding mode variable structure control strategy (SMC) to improve the robustness of the system. This paper presents a method of variable parameters SMC, SMC controller is designed and the simulation and experimental study on SMC expression and PI controller, control the design as simple, results show that the designed SMC controller can improve system robustness and dynamic performance effectively.Key Words:PI control, Permanent magnet synchronous ,Sliding mode control, Robustness目录1 引言 (1)1.1永磁同步电动机的发展概况和发展前景 (1)1.2永磁同步电机控制系统的发展历程 (1)1.3滑模控制永磁同步电动机的概述 (2)2永磁同步电动机的数学模型和工作原理 (4)2.1永磁同步电动机稳态方程 (4)2.2永磁同步电动机的双反应理论 (5)2.3永磁同步电动机的等效电路 (6)2.4永磁同步电动机的损耗和效率 (7)2.5永磁同步电动机的数学模型 (8)3控制器的设计 (11)3.1滑模变结构控制的基本定义 (11)3.2滑模变结构控制系统的原理和设计方法 (12)3.3滑模变结构控制的特点 (13)3.4 SMC控制器的设计 (14)3.5稳定性分析 (15)3.6 SMC控制器与PI控制器的比较 (16)4仿真和实验研究 (18)结论 (21)参考文献 (22)致谢 (24)1 引言1.1永磁同步电动机的发展概况和发展前景近年来,随着电力电子技术的新型电机控制理论和稀土永磁材料,永磁同步电机的快速普及和应用的快速发展。
与传统的电励磁同步电动机相比,永磁同步电机,特别是稀土永磁同步电机损耗少,效率高,节能效果明显。
用永久磁铁激磁的永磁同步电机的,电机的结构比较简单,降低加工和装配的成本,并且消除了需要容易出错的集电环和电刷的电动机的操作,提高了可靠性,因为需要电流的励磁损耗,提高电机的效率和功率密度,所以它是在最近几年的研究,越来越被广泛应用在各个领域的电动机。
在能源节约和环境保护日益受到重视,他们的研究是非常必要的。
所述交流电动机的速度控制系统的数学模型是一个高层次,多变量,非线性,强耦合系统的主要组成部分的一个,通过一系列的假设和坐标变换,我们得到一个相对简单的数学模型,交流变频调速系统数学模型,但模型不能准确反映速度控制系统的暂态过程,使传统的线性调节规律的交流驱动系统有一定的局限性。
大多数传统的永磁同步电机控制器采用PI调节器,PI控制算法是简单的,能够在一定范围内,以满足控制要求,但需要精确的数学模型。
外部干扰和内部扰动的不确定性在实际应用中,传统的PI控制器难以满足高性能控制的要求,它是难以得到满意与州长性能的定位,系统的鲁棒性不理想。
现代控制理论的发展,永磁同步电机的高性能控制器实现提供了可能性,但该控制方法的复杂性限制了它的广泛应用。
1.2永磁同步电机控制系统的发展历程永磁同步电机控制技术的不断发展,控制技术应用的逐渐成熟,如SVPWM SVM-DTC,DTC,MRAS方法在实践中应用。
然而,在实际应用中,各种控制策略存在一些缺点,如低速特性是不理想的,过度依赖电机参数,等等,因此,研究存在的问题,在控制策略有很大的意义。
在1971年,德国学者交流电机矢量控制的新思路,新理论和新技术,它出现交流电机控制技术,具有非常重要的意义。
因为向量变换的AC构成一个面向外地的闭环控制系统,与直流系统的控制性能。
然后,电力电子技术,微电子技术,计算机技术和永磁材料科学,矢量控制技术,快速的应用程序开发和推广。
机电能量转换,电机统一理论的发展空间矢量矢量控制理论的基础上,首次应用三相异步电动机,并很快扩展到三相永磁同步电动机。
由于三相感应电动机正在运行时,热量将导致在转子的转子参数的变化,同时观察在转子的转子磁场的依赖关系中的参数,从而使磁场的转子,使控制的实际效果是很难实现的理论结果的分析,这是矢量控制方法的不足之处,是难以精确地观察到。
永磁同步电机转子的永久磁铁固定的参数,被广泛应用于永磁同步电机矢量控制的低功耗和高精度的场合。
随后,在1985年,由德国鲁尔大学教授首次提出了直接转矩控制理论,然后扩展到磁电式转速范围。
相比,矢量控制技术,矢量控制三相异步电机直接转矩控制特性易受电机参数变化的影响,在很大程度上解决这个问题。
直接转矩控制的诞生,一个新的控制自己的思想,简明的系统结构,优良的静态和动态性能的普遍关注,并得到了快速发展。
成功的技术,大功率交流传动电力机车牵引。
德国,日本,美国都在争先恐后地开发这项新技术。
20世纪90年代,随着微电子技术和计算机控制技术的发展,高速,高集成度,低成本的微处理器被释放和商业化,全数字式交流伺服系统。
计算机控制使电机的转速性能已大大提高,可以实现复杂的矢量控制和直接转矩控制,大大简化了硬件,降低成本,并提高了控制精度,但也有保护显示,故障监测,自诊断,自我调试和自复位功能。
此外,改变控制策略,这一修正案,容易控制参数和模型,从而大大提高了系统的灵活性,可靠性和实用性。
近年来,国家的最先进的数控交流伺服系统,有几家公司已经推出了专门用于电机控制芯片。
可以快速完成系统的速度环,电流环和位置环精度快速调整和复杂的矢量控制,以确保算法,用于电机控制,矢量控制,直接转矩控制,神经网络控制高速,高精度完成。
非线性解耦控制,人工神经网络自适应控制,模型参考自适应控制,观察控制和状态观测器,线性二次积分控制和模糊智能控制等新的控制策略不断涌现,更广阔的前景。
因此,高性能的数字信号处理器,数字式交流永磁伺服智能控制系统,交流伺服系统是一个重要的发展方向。
1.3模控制永磁同步电动机的概述滑模变结构控制在20世纪50年代,前苏联学者Utkin和Emelyanov变结构控制的概念,研究对象:二阶线性系统。
在20世纪60年代,研究对象:高阶线性单输入单输出系统。
专注于高阶非线性系统线性切换功能限制和不受限制的二次开关功能的控制下。
1977年:发表评论Utkin纸变结构控制,变结构控制系统VSC和滑模控制SMC。
从那时起,来自不同国家的学者开始研究多维滑模变结构控制系统的规范空间扩展到更普遍的状态空间。
中国学者首次提出了高兵元氏达到法律的概念,首次提出的概念分层的自由。
滑模控制系统的参数摄动和外部干扰的不变性量来控制高频抖的价格。
近年来,研究人员尝试SMC应用于各类电机位置伺服系统,研究表明,它可以有效地提高随时间变化的非线性摩擦和负载,从而提高系统的鲁棒性,一些学者已经开始探索永磁同步电机SMC技术,调速系统为永磁同步电机位置传感器速度控制系统,提高精度的速度观察员。
SMC永磁同步电机直接转矩控制和相关的实验证明,SMC可以改善直接转矩控制电流磁通和转矩脉动。
ü罢工与S&形式趋近律,接近自然法则,以满足的s&<0的稳定性条件得到控制量u的接近法,以满足工程变更参数。
速度环和电流环矢量控制的永磁同步电机调速系统设计一个SMC调节,有研究表明,系统的鲁棒性和可塑性已大大提高,但由于时间常数的电气和机械系统时间不一致恒定电流环和速度环设计使调试参数的选择比较困难,不容易达到。
趋近律和内部模型控制施加到永磁同步电机的驱动系统,但只有仿真波形。
趋近律滑模永磁同步电机速度控制系统的有效性进行验证的模拟分析和实验研究。
从实用的角度来看,基于矢量控制的永磁同步电机调速控制系统的特点,SMC控制器设计的一个简单实现。