谐振频率跟踪系统
- 格式:doc
- 大小:190.50 KB
- 文档页数:8


三种谐波治理技术的对比
谐波治理技术大致分为调谐滤波、无源滤波、有源滤波三种
调谐滤波和无源滤波都是针对系统中的某次谐波设计的被动滤波方法,由一定比率的电抗器和电容器串联组成。
调谐滤波主要用于无功补偿,它也可以滤除少部分谐波。
无功滤波阻抗低,谐振频率靠近谐波频率,可滤除大部分谐波,但如果系统谐波分量复杂,必须针对不同谐波分量设计不同次数的滤波柜。
有源滤波是由电力电子器件组成的谐波发射装置,是一种主动滤波方法,它通过实时检测负载测的谐波电流,主动跟踪产生等幅反相的谐波电流注入电网,从而净化电网电源,它可以实现任意阶次谐波的滤除。
三种技术对比如下:
主要原因:站场电力系统大都为双变压器,单母线分段接线方式,系统运行方式是可以发生变化的;站场生产系统基本采用闭环自动控制,根据来液量或压力等调节变频器输出频率,谐波分量动态变化;此外,站场变频设备大都有两台以上,谐波含量较高,谐波分量多。
来源:杂志《电气名用》作者:大港油田采油工艺研究院陈学梅。




一种无线充电电源的方案设计摘要:本文设计了一款无线充电发射模块和接收模块,论述了磁耦合谐振式无线电能的传输基本原理,对设计方案中的发射模块进行了详细说明,针对接收模具提出了一种基于数字锁相环的频率跟踪方案。
关键词:无线充电电源;磁耦合谐振式;谐振补偿引言无线充电技术,是利用近场感应,也就是电感耦合,由供电装置(即充电器)将能量传送至用电的装置,该装置使用接收到的能量对电池充电。
无线充电技术可分为四种类型:磁谐振式,电磁感应式,微波式和电场耦合式。
其中磁谐振式无线电能传输技术是将发射线圈的工作频率与接收线圈的工作频率调节一致,形成共振,在接收线圈中产生电流,实现电能的无线传输。
本文主要开展适用的磁谐振式快速无线充电技术的研究工作,解决同时实现大功率、远距离和高效率的技术瓶颈,提供高可靠性、高适用性的充电解决方案。
一、磁耦合谐振式无线电能传输机理通常使用等效模型的方式来研究磁耦合谐振式无线电能传输(WPT)系统的特性。
磁耦合机构可以等效为漏感较大的变压器,利用互感耦合模型可以有效分析WPT性能和参数变化情况。
通过采用电容补偿的方式来实现WPT系统的“谐振”效果,根据传能的不同要求来确定补偿拓扑结构。
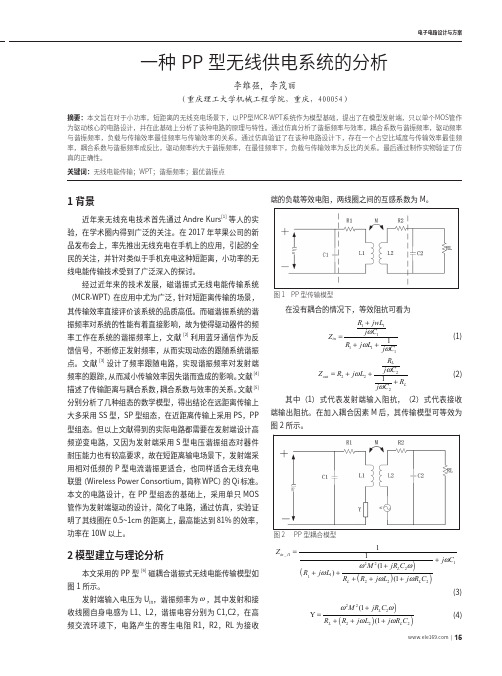
1.1 WPT系统互感耦合模型图1为WPT系统磁耦合机构的电路拓扑及其等效模型,其中L p、L s分别为初级线圈、次级线圈的自感值,M为它们的互感值。
r p、r s分别为初、次级线圈内阻,R l为负载电阻,图1 磁耦合机构电路带载等效互感电路模型用频域变换列写初、次级回路方程(1)引入反映阻抗 Z r的概念,Zr为次级侧对初级侧的等效阻抗:(2)又次级回路中的总阻抗:(3)将式(3)回代式(2)化简则有:(4)借助反映阻抗将次级侧的电路可以等效至初级侧电路中进行分析计算,如图2图2 初级等效电路则输入侧的等效输入阻抗为:(5)从以上分析可得,初级等效电路中的阻抗除了纯阻性成分外还有电抗部分且电抗部分主要为感性成分。



移相全桥方案参数设计引言:移相全桥是一种常用的电力电子变换器拓扑结构,广泛应用于各种电力供应系统和工业控制领域。
在设计移相全桥方案时,关键是确定合适的参数,以实现所需的电气性能和效率。
本文将从输入电压、输出电压、频率、功率、开关器件和控制策略等方面进行详细的参数设计。
一、输入电压:输入电压是移相全桥的基本参数之一,决定了输出电压的范围和调节能力。
在设计过程中,需要考虑系统所需的最大输出电压和输入电压范围,以及电压调节的精度要求。
同时,还需考虑输入电压的波动和噪声等因素,并合理选择输入电容和滤波器等元件以保证系统的稳定性和可靠性。
二、输出电压:输出电压是移相全桥方案的重要参数之一,直接影响到系统的电气性能。
在设计过程中,需要确定所需的输出电压范围和调节能力,以及电压调节的精度要求。
同时,还需考虑电压波动和纹波等因素,并合理选择输出电容和滤波器等元件以保证输出电压的稳定性和纹波值。
三、频率:频率是移相全桥方案的重要参数之一,决定了系统的工作速度和输出电压的调节响应速度。
在设计过程中,需要根据具体应用要求确定系统的工作频率范围和调节速度要求。
同时,还需考虑开关器件的特性和互感器的选取等因素,并合理调节谐振电感和谐振电容等元件以实现所需的频率。
四、功率:功率是移相全桥方案的重要参数之一,决定了系统的输出能力和效率。
在设计过程中,需要根据具体应用要求确定系统的最大输出功率和效率要求。
同时,还需考虑开关器件的能力和散热等因素,并合理选择功率开关器件和散热器等元件以实现所需的功率。
五、开关器件:开关器件是移相全桥方案的核心元件之一,直接影响到系统的性能和可靠性。
在设计过程中,需要根据输入电压、输出电压、频率和功率等参数确定合适的开关器件。
常用的开关器件包括IGBT、MOSFET和功率二极管等,需要根据具体需求选择合适的器件型号和参数。
六、控制策略:控制策略是移相全桥方案的关键之一,决定了系统的输出电压和功率特性。

第 22卷第 11期2023年 11月Vol.22 No.11Nov.2023软件导刊Software Guide基于FPGA的超声手术刀频率跟踪技术设计黄永国1,陈小红1,孙福佳2,林晓佳3,赵浩男1(1.上海理工大学材料与化学学院;2.上海理工大学机械工程学院;3.上海理工大学健康科学与工程学院,上海 200093)摘要:超声手术刀在工作过程中由于超声换能器的声阻抗变化、自身发热等情况导致其谐振频率产生漂移,驱动信号的频率难以准确地工作在换能器的谐振频率处,从而导致超声换能器停震或损坏。
为解决上述问题,采用等效电路法分析超声换能器的谐振频率特性,设计基于FPGA的频率跟踪方法实时跟踪超声换能器的谐振频率。
首先利用DDS产生频率可调节的驱动信号,然后设计相位检测模块实时检测换能器电流和电压的相位差,同时为了提高跟踪效率,通过PID算法进行控制以实现频率跟踪。
实验结果表明,所设计的频率跟踪方法可以快速实现频率跟踪,跟踪误差保持在±2Hz内,避免了跟踪过程中出现的反谐振频率跟踪和失锁等问题,具有响应速度快、鲁棒性强等优点。
关键词:超声换能器;DDS;谐振频率;相位检测;PID;FPGADOI:10.11907/rjdk.222379开放科学(资源服务)标识码(OSID):中图分类号:TP319 文献标识码:A文章编号:1672-7800(2023)011-0133-08Design of Frequency Tracking Technology of Ultrasonic Scalpel Based on FPGA HUANG Yongguo1, CHEN Xiaohong1, SUN Fujia2, LIN Xiaojia3, ZHAO Haonan1(1.School of Materials and Chemistry, University of Shanghai for Science and Technology;2.School of Mechanical Engineering, University of Shanghai for Science and Technology;3.School of Health Sciences and Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China)Abstract:During the operation of the ultrasonic scalpel, the resonant frequency of the ultrasonic transducer drifts due to the change of acous‑tic impedance and self-heating of the ultrasonic scalpel, which makes it difficult for the frequency of the driving signal to accurately work at the resonant frequency of the transducer, thus causing the ultrasonic transducer to stop or be damaged. In order to solve this problem, the equivalent circuit method is used to analyze the resonant frequency characteristics of the ultrasonic transducer, and a frequency tracking meth‑od based on FPGA is designed to track the resonant frequency of the ultrasonic transducer in real time. First of all, DDS is used to generate drive signals with adjustable frequency. Then a phase detection module is designed to detect the current and voltage phases of the transducer in real time. At the same time, in order to improve the tracking efficiency, frequency tracking is realized by PID algorithm. The experimental re‑sults show that the frequency tracking method designed in the experiment can quickly achieve frequency tracking, and the tracking error is kept within ± 2Hz and avoiding the problems of anti-resonance frequency tracking and locking loss during the tracking process. It has the char‑acteristics of fast response speed and strong robustness.Key Words:ultrasonic transducer; DDS; resonant frequency; phase detection; PID; FPGA0 引言超声手术刀又称超声刀,作为一种首选的电外科手术器械,其能够实现软组织切割和血管闭合等功能,已广泛应用于多种临床手术中[1]。


电能给人类带来巨大的发展,然而错综复杂的输电线分布在生活的各个角落,给人们带来极大的不便,因此人类一直有摆脱电线的束缚实现电能无线传输的梦想。
迄今为止,人们提出了三种电能无线传输方式:一是微波线电能传输方式。
该方式利用无线电波收发原理传输电能,传输功率只能在几毫瓦至一百毫瓦之间,应用范围不大;二是电磁感应无线电能传输方式。
该方式利用变压器原副边耦合原理传输电能,传输功率大,效率高,但距离很近,仅在1cm内,目前已在轨道交通方面应用;三是谐振耦合电能无线传输方式。
该方式利用电路中电感电容谐振原理传输电能,理论上电能的传输功率、传输距离不受限制。
该技术的传输距离和功率从2007年的2m、60w,进展到2008年底的5m、800w,是当前最有希望突破传输距离和传输功率的一种电能无线传输技术,但该技术还存在谐振线圈尺寸过大和容易失谐等问题。
该文追踪国际研究热点,力图解决谐振耦合电能无线传输方式中收发线圈谐振频率失谐的问题。
该文从谐振耦合电能无线传输系统的电路模型入手,分析了系统各部分参数与传输效率之间的关系,研究发现发射线圈电感量的变化对传输效率的影响较大,而接收线圈电感量的变化对效率影响较小,进而提出采用锁相环频率跟踪的技术,确保收发线圈工作在谐振频率上,保证系统的传输效率,最后用实验结果验证了所设计的频率跟踪系统的可行性。
该文的成果对谐振耦合电能无线传输方式的实际应用有重要的指导意义。
1 引言电能无线传输一直是人类的梦想,许多国内外科学家对此进行不断的研究。
然而迄今为止,大部分的无线传输都还只是基于松散耦合的非接触电磁感应型及电波收发型[1-4]。
关于这两者已有一定的研究基础[5-8],并在日常生活得到应用,如电动牙刷、家用无绳电话等。
虽然松散耦合非接触电能无线传输效率高达80%,但其传输距离仅限在1cm内;而电波收发型传输距离可达10m,但传输功率只在1mw~100mw范围内,且无线电波向四周散射,效率极低。
谐振频率跟踪系统
摘要
:
本系统以LC并联谐振电路为调整谐振频率的核心,以msp430单片机为
控制核心,并辅以场效应管,门限比较器,过零比较器等外围电路,设计完成了
谐振频率跟踪系统。系统主要通过过零比较器得到不同相位的方波信号,由
msp430单片机的输入捕获单元获得相位差,进而来控制门限比较器,改变并入
LC并联谐振电路的电容。并入的电容的大小由5位二进制开关量来控制,形成
了一个闭环反馈系统,从而可以精确的跟随谐振频率。
关键词:
LC并联谐振电路 msp430单片机 谐振频率 门限比较器
一、系统方案设计与论证
1.1相位比较部分方案论证和选择
方案一:采用LM324运放,其转换速度比较慢,会影响输出相位差。
方案二:采用LM084运放,其转换速度快,使得输入430单片机的相位差跟
准确,从而使谐振频率更准确。
因此,我们采用方案二。
1.2场效应管方案论证和选择
因为场效应管的原极和漏极是不用区分的,使用起来比较方便。所以这里我
们选择了场效应管。
1.3单片机供电的方案论证和选择
方案一:直接用3.3V电源供电。
方案二:由给运放供电的10V电源通过转2.5V三端稳压器和4.7K的电阻串
联供电,一方面,可以在整个系统只用一个10V电压源供电,节省电压源。另一
方面,可以使msp430单片机的输入端电压约为2.5V+0.7V=3.3V,不会太大而烧
坏单片机。
因此,我们选择方案二。电路图如图1.1所示
图1.1单片机模块供电原理图
二、理论分析计算和功能电路设计
2.1、 谐振频率跟踪系统的原理及其方框图
原理:LC并联谐振电路通过LC两端输出电压Uo和信号源电压Ui的相位不
同,控制430单片机反馈调节并入LC并联谐振电路电容的大小,从而达到跟踪
谐振频率的目的。
系统框图如图2.1所示:
信号源LC并联谐振电路过零比较器过零比较器钳位保护电路
钳位保护电路
MSP430单片机
并联电容门限比较器
图2.1 系统框图
2.2、相位比较部分的设计
输入信号电压与LC两端电压分别通过LM084运放产生两路相位不同的方波,
我们可以根据这两路方波的相位差来谐振频率是否跟踪到输入信号的的频率。
运放的输入电压也不宜过大,在此我们选择三极管的基极和发射机(电压较
4148稍大)来组成双向钳位电路,并用4.7K电阻分压,使运放的输入端电压约
为+/-0.7V,使运放不至于烧坏。电路图如图2.2所示:
图2.2 相位比较及保护电路图
2.3、并联电容C的开/关选择部分的设计
通过控制门限比较器来控制场效应管的通、断。当门限比较器的输入为低电
平时,其输出就是正,此时二极管反向接入,场效应管的栅极为0,场效应管导
通,对应的电容接入电路;当门限比较器的输入为高电平时,其输出就是负,二
极管导通,场效应管的栅极为负电压,场效应管截至,对应的电容不接入电路。
5个电容按照2进制的比例增加,依次取5.6nF,11nF,22nF,44nF,88nF。这
样就可以组成32种可调电容。
电路图如图2.3所示:
图2.3 并联电容C的开/关选择电路
2.4、LC并联谐振电路设计
谐振频率f0=1/(2πLC),若输出Uo相位超前,说明并入谐振电路的电容
取大了,单片机会控制并联电容C的开、关选择电路部分,一级一级的减小接入
谐振电路的电容。若输出Uo相位滞后,说明并入谐振电路的电容取小了,单片
机会控制并联电容C的开、关选择电路部分,一级一级的增加接入谐振电路的电
容。最终使得LC并联谐振电路的谐振频率基本等于输入信号的频率。达到谐振
频率跟随的效果。
这部分电路要保证Uop≈0.2V,因为当Uop超过0.4V时,场效应管会反向击
穿。令所有电子开关分别导通,关断,调整电阻R值,使UoP≈0.2V。得到R=11.5K。
电路图如图2.4所示:
计算最大截至频率和最小截至频率:
所有电子开关关断,计算出LC回路的fH=3700Hz。
所有电子开关导通,计算出LC回路的fL=2700Hz。
图2.4 LC并联谐振电路
2.5、单片机控制模块的设计
通过MSP430单片机的输入捕获单元得到相位差,根据相位差的大小判断出
相位是超前还是滞后,再由输出端控制使相应的电容接通或断开,来改变并入
LC并联谐振电路的电容,从而达到谐振频率跟随的目的。
由于相位比较部分输出的电压是运放正负电源的值-10V和+10V,远远超出了
单片机安全工作电压,因此,这里我们用4.7ko的电阻来分压,并且还用到了
4148二极管双向钳位电路来保证单片机工作在安全电压范围内。当相位比较部
分输出电压为电源正电压+10V时,双向钳位电路就会将输入到单片机端的电压
钳制为2.5V+0.7V=3.3V。当相位比较部分输出电压为电源负电压-10V时,双向
钳位电路就会将输入到单片机端的电压钳制为-0.7V。使单片机不至于烧坏。
电路图如图2.5所示
图2.5 单片机及保护电路图
2.6、电源滤波
为了使输出波形更加稳定,我们在电源附近都加上两个电容来滤波,会使波
形效果更好。
三、系统软件设计
程序流程图如图3.1所示:
图3.1 程序流程图
四、测试结果和分析
1.测试仪器
1. TDS1002数字示波器
2. TFG1005DDS信号发生器
2.测试方案
用DDS信号发生器产生10v峰峰值,2500Hz到3500Hz的正弦波到谐振频
率跟踪仪的输入端。通过示波器时时观察在频率改变时,跟踪仪产生的两路经过
比较器处理后形成的方波信号。比较两路波形的相位差。从而检测跟踪仪的效果。
3.测试结果
经测试,当输入信号在2500Hz到3500Hz范围内时,单片机能够自动调节谐
振信号的相位,使得谐振信号与输入信号的相位差在5°以内,并稳定下来。具
体测试数据如下:
输入信号频率输出信号频率稳定后相位差
2400Hz2400Hz无法稳定
2500Hz2500Hz1°
2600Hz2600Hz3°
2700Hz2700Hz5°
2800Hz2800Hz4°
2900Hz2900Hz2°
3000Hz3000Hz0°
3100Hz3100Hz4°
3200Hz3200Hz0°
3300Hz3300Hz4°
3400Hz3400Hz2°
3500Hz3500Hz4°
3600Hz3600Hz无法稳定
谐振频率跟踪仪测试数据表
五、结论
通过理论计算谐振频率范围为3.3KHzf2.5KHz0,在实际测量中2500Hz到
3500Hz之间都可以实现谐振频率跟踪,基本实现了预期结果。当然,在此频率
范围内实现谐振频率的零相位差跟踪是不可能的,我们允许一定的相位差范围,
通过单片机控制电子开关来调节并联电容的开、关,让谐振信号与输入信号的相
位差在5°以内,此时单片机认为跟踪结束。
参考文献:
[1] 邱关源 .电路(第5版)[M]. 高等教育出版社,2006.3