德国kado纠偏操作手册
- 格式:doc
- 大小:984.50 KB
- 文档页数:22

操作手册SPC compact 板带对边纠偏系统用于无机械臂连接的卷取机•测量系统CCDpro•“错边”功能•数字式控制器 SPC compact / SPCc0126_1•选件: 模拟输出模块修改情况:名字: 日期:00 新版格式 + 安全措施Roet 16.09.08© 2022 EMG Automation GmbH. 版权所有本文档拷贝权归属EMG Automation GmbH. 本文所涉及的技术信息禁止以任何形式拷贝、传播或未经授权对外交流或用于竞争目的。
技术修订目录目录1安全错误!未定义书签。
1.1简介错误!未定义书签。
1.2总则错误!未定义书签。
1.3安全规程的违背错误!未定义书签。
1.4基本安全预防措施错误!未定义书签。
1.4.1地方性法规,官方指令和规程错误!未定义书签。
1.4.2应用范围错误!未定义书签。
1.5构造及目的错误!未定义书签。
1.5.1参照符号表错误!未定义书签。
1.6安全规程总述错误!未定义书签。
1.6.1技术状况介绍错误!未定义书签。
1.6.2安全防护装置的移除错误!未定义书签。
1.7具体安全规程错误!未定义书签。
1.7.1机械危险错误!未定义书签。
1.7.2电气危险错误!未定义书签。
1.7.3液压危险错误!未定义书签。
1.8责任和资质要求错误!未定义书签。
1.8.1授权人员/雇员资质错误!未定义书签。
1.9设备故障和损坏的告知责任错误!未定义书签。
1.10必要的防护服错误!未定义书签。
1.11禁止改造和变更错误!未定义书签。
1.12维护责任错误!未定义书签。
2系统的简要描述错误!未定义书签。
2.1应用错误!未定义书签。
2.2控制器SPCc 错误!未定义书签。
3工作模式错误!未定义书签。
4调试错误!未定义书签。
4.1事故预防的信息错误!未定义书签。
4.2安装错误!未定义书签。
4.2.1连接条件错误!未定义书签。
4.2.2CCD摄像头 CCDpro 5000 测量系统的安装错误!未定义书签。

Kada-well模高指示器使用说明书一、系统功能说明凯达威尔电子模高指示器系列产品采用德国工业级传感IC、台湾工业级主控CPU、集成防震多组LED屏显示、双精密滚动轴承配合传动,产品性能稳定已经日本PSE认证、荣获3项发明专利,主要功能包含:1.参数设定:模高值、上限值、下限值、旋转计数方向、信号传动比等参数,均由外置式无线设置器一键设定。
只要安装尺寸对,就能适用各种品牌各种型号的机台;2.掉电记忆:模高指示器内置掉电保护记忆,异常掉电时自动储存参数;3.限位警示:检测到模高行程超出设定范围时,相应的上下限数值会闪烁警示,其控制端断开;4.故障保护:当机台因故障致使模高指示器损坏时、或者产品本身故障时,故障指示灯闪烁警示、故障控制端断开;(此功能需客户预先订制)5.三防保护:本产品在传动轴处加装油封、接线处加装防油抗震胶、电路板全面被覆防油抗震胶,最大限度的阻隔油污、水渍、震动对产品的影响;6.高分辨率:传动轴每旋转360度信号采样1024个角度信号,显示精度可达0.01(特定型号显示精度可达0.001);7.使用环境:-20℃~70℃温度下正常工作。
二、具体参数说明[如下表]三、面板显示说明[如下图]1. LED数码:1.1 模高值:上部5位红色数码管显示,设置时闪亮,正常使用时常亮;1.2 上限值:左下部4位绿色数码管显示,设置及超限时闪亮,正常常亮;1.3 下限值:右下部4位绿色数码管显示,设置及超限时闪亮,正常常亮;2. 指示灯:2.1 RUN灯: 长亮表示模高值在正常行程范围内,不亮表示超出行程范围;2.2 ERR灯:不亮表示“正常”工作中,闪亮表示“故障”,长亮表示“故障”;2.3 REV灯:长亮表示从正前方向看,传动轴顺时针方向旋转,数字减小;不亮表示从正前方向看,传动轴顺时针方向旋转,数字增加。
四、设置器及设置方法1.按键说明2.菜单说明2.1 将无线设置器电源ON/OFF开关按下,开启设置工作;2.2 显示第一页菜单“模高值”(上部红色5位)、“上限值”(左下部绿色4位)、“下限值”(右下部绿色4位),[默认值320.00-350.0-270.0];2.3 按UP键,显示第二页菜单“传动比之转数”(上部红色5位)、“传动比之距离”(左下部绿色4位)、“计数转向&预留值”(右下部绿色4位),[默认值0010-001-L 2];2.4 再按UP键,显示第三面菜单“传输设置密码”,[默认值-----];3.设置说明3.1 在第一菜单时按住MODE键3秒,进入设置模式,“模高值”组闪亮提示,按设置SET键,首位数字闪亮,按UP键可对当前数值变更,再次按下设置SET键可依次对其余数字进行设置;3.2 “模高值”设置完成后再按MODE键,此时“上限值”组闪亮提示,按设置SET键,首位数字闪亮,按UP 键可对当前数值变更,再次按下设置SET键可依次对其余数字进行设置;3.3 “上限值”设置完成后再按MODE键,此时“下限值”组闪亮提示,按设置SET键,首位数字闪亮,按UP 键可对当前数值变更,再次按下设置SET键可依次对其余数字进行设置;3.4 “下限值”设置完成后再按MODE键,此时进入第二菜单“传动比之转数”组闪亮提示,按设置SET键,首位数字闪亮,按UP键可对当前数值变更,再次按下设置SET键可依次对其余数字进行设置;3.5 如此类推,可继续设置“传动比之距离”、“计数转向&预留值”、“传输设置密码”的数值。

德国乐凯多功能剪扩钳使用手册刀片类型:1.危害类别以下表格仅供了解危害类别及常用警示符号含义:请佩戴头盔和面罩请佩戴安全手套请穿安全鞋用恰当的方法回收遵守环境相关的法律法规阅读和遵守设备操作手册2.操作安全性只有在使用正确的情况下,乐凯产品的性能才能达到最优。
乐凯在设计其各种产品时,就已经充分考虑过产品操作的安全性。
尽管如此,任何错误或不恰当操作,仍然可能导致事故的发生。
所以,只有经过产品使用培训并了解安全操作知识的人员才能操作乐凯产品。
:如果您已经了解相关操作安全性,请再仔细阅读了解!设备使用过程中,除了遵守操作手册相关规定外,还需要遵守国内国际相关的事故预防方法和环境保护法。
严禁操作手在过度疲劳或酒后操作设备3.正确使用说明LUKAS“SC”系列多功能剪扩钳和LUKAS“S”系列剪切钳是专门设计针对公路,轨道,机场和建筑物等事故中对人员地救援。
救援人员可通过使用剪切钳或剪扩钳对门,屋顶梁和百叶窗等其它障碍物进行剪切救援,也可使用扩张器对门或者其它障碍物进行扩张救援。
运用图例:警示:1.严禁在未获得LUKAS允许的情况下私自设置设备的操作压力。
任意的设置可能会危害人生财产安全。
2.严禁将设备与酸性或碱性物质接触。
如救援现场无法避免,接触后立即清理。
该系列设备的所有附件和备件均可从LUKAS授权代理商处购买!4.功能4.1.功能描述剪切钳和多功能剪扩钳是通过内置液压活塞来的机械原理控制切割刀片的开闭,从而保证物体被剪切。
该系列的所有产品在操作时,只需简单转动星状手控阀即可轻松工作。
+对液压系统的完好控制+使用直观+作业精确,保证救援者与被困者的安全+降低作业的难度与压力+握持与操作清晰分离4.2.各部位名称1-星状手控阀2-控制阀3-器材外壳4-提手处5-保护壳6-刀片7-刀片固定螺丝8-把手处9-压力管10-回油管11-快速接头12-快速接头13-快速接头所有活塞的控制均由星状手控阀控制(见下图):5.设备连接5.1 概述该系列产品在尾部均有两条软管连接到机动泵组,为了确保连接的正确性,两条软管涂有不同的颜色以便区分。

成型机E+L-SVS纠偏系统安装调试手册目录:一,纠偏系统的组成二,纠偏系统的安装三,纠偏系统的配线四,纠偏系统的调试方法五,常见故障分析六,纠偏系统的区块图一、纠偏系统介绍成型机SVS定中纠偏系统零件:序号名称型号数量是否必须使用1 马达AG2591 1 必选2 电眼FR5001 2 必选3 电眼线 2.8m伸缩线 2 必选4 反光板左反光板/右反光板 2 必选5 接近开关PNP常开(倍加福) 1 必选6 接近开关座 1 可选/可不选7 控制器DC1340R 1 必选8 电眼安装支架VA5121 2 按照实际情况选择9 马达线6*0.75mm屏蔽线可选/可不选图1,马达外型图图2,电眼外型图图3,电眼线外型图图4 ,反光板外型图图5,接近开关外型图图6,接近开关固定座外型图图7,控制器外型图图8,电眼安装支架外型图二、纠偏系统安装1、马达安装方法首先将马达(马达料号:NR:230567)延长至机械长度(M=355mm)安装时,确认马达的机械中心与导正架(滑轨)的机械中心重合。
2、接近开关安装方法确认一下两点后再安装接近开关: A, 马达的机械长度M正好处在355mm。
B,导正辊处的滑块位于滑轨的中心处。
,安装方法:在马达机械长度(M=355mm)状态下,安装铁片边缘在接近开关中间位置,安装高度2-3mm 即可目的:在马达行进过程中,只有一次信号切换,通过计算与接近开关的位置,达到快速回中的目的3、系统配线见附件注意PLC输给E+L纠偏的控制信号与E+L纠偏的电源要共用零点三,纠偏的调试步骤检查E+L电源线和信号线是否为24VDC,确认没问题后,上电。
1、根据马达对RK4004 设定参数(按照以下方法进行检查,若参数不对,则修改)首先、安装不松手,按一下,显示。
0,继续按,至显示。
3,然后松开,此时显示0,再按至42,完成解锁功能。
其次----设定参数(1)按住不松手,显示。
4 , E+L(2)按住不松手,按至13(纠偏灵敏度),松开,按将其至3.0(3)按住不松手,按至16(自动速度),松开,按至20(4)17参数为回中速度(5)按住不松手,按至24(电机方向),松开,按至1(6)按住不松手,按至25(电机总行程),松开,按至100(7)按住不松手,按至26(电机正行程),松开,按至30(8)按住不松手,按至27(电机负行程),松开,按至-30(9)按住不松手,按至34(编码器解析度),松开,按至8(10)按住不松手,按至35(减速比),松开,按至8(11)按住不松手,按至36(螺杆牙距),松开,按至5(12)按住不松手,按至48(最大电机转速),松开,按至2750(13)按住不松手,按至50(速度_P),松开,按至2.0(14)按住不松手,按至51(速度_I),松开,按至0.1(15)56 电流 4A(2.9时报警Err3)(16)按住不松手,按至57(电机电流),松开,按至2.9(17)按住不松手,按至81(马达极限信号),松开,按至2(18)按住不松手,按至83(回中开关信号),松开,按至-3(19)按住不松手,按至84(自动信号),松开,按至14(20)按住不松手,按至85(对号),松开,按至11(更改为15)(21)按住不松手,按至86(手动信号),松开,按至15(更改为11)(22)97#参数0801(23)按住不松手,按至99(选择双电眼工作),松开,按至1(24)按住不松手,按至3,松开,按至10(给电机做初始化)(25)按住不松手,按此时,执行马达初始化,初始化后,按照上述方法,检查30,31号是否为0。
BST纠偏系统的使用注意事项及典型故障排除指南未定稿本手册包括BST纠偏系统的使用注意事项及典型故障排除指南, 使用对象主要为设备现场操作人员和设备部门的技术维护人员。
请仔细阅读,并按照该手册进行纠偏系统的操作。
目录一、BST纠偏系统主要部件的简要说明二、使用注意事项及常识三、更换部件时需要的设置四、纠偏部件非正常损坏的可能原因五、典型故障处理1、控制器EKR1000/15002、控制器EKR Pro系列3、数码传感器CCD和模拟传感器4、各种通讯模块、控制模块和电源模块5、可编程控制器Prologic6、触摸屏Protouch一、B ST纠偏系统主要部件的简要说明控制器EKR: 是接收传感器信号并且输出给推动器动作信号的机构,具有计算控制操作,型号有EKR1, EKR2,EKR1000(PDP), EKR2000,EKR1500(PDP), EKR Pro Com40, EKR Pro Com 50, EKR ProNet40等型号。
另有ET1500控制器用于测宽应用,可将像素值(Pixel)转换成长度值(mm)。
传感器:是检测物料位置变化信号的部件,有输出模拟量的红外传感器和超声波传感器等,型号有IR2001/IR2002/US2007等,还有反射式传感器R42D16,也有数字量的高精度数码传感器CCD系列,型号有CCD5000/CCD30000/CCD Pro 5000/ CCD Pro 30000等。
推动器:是推动纠偏支架带动物料移动完成纠偏动作的机构,目前在用的多数为电动推杆式,直流电机型号有EMS1 /EMS5 /EMS6 / EMS10/EMS16P /EMS17/ EMS20等,交流电机型号有EMS3 / EMS4。
也有驱动力更大的液压式推动器。
回中开关:是完成找回零位的一种传感器,回中位置即推动器的行程中心位置。
型号有OMG4/OMG8/CK37等。
纠偏系统是一个闭环的控制过程,由传感器检测物料的实际位置变化信号,再将信号传送给控制器,控制器将物料的实际位置和设定位置进行比较后再发出指令给推动器,推动纠偏支架带动物料一起移动,当物料到达所要求的位置时,纠偏动作完成。
使用说明书 GK-51模拟光电纠偏控制系统为了您能正确地使用本产品,使用前请务必通读本手册,完全理解和掌请保管本手册于产品使用的场所,以便在需要时可翻阅参考。
握手册中的内容。
R前 言 非常感谢阁下购买及使用本公司产品。
纠偏控制系统由模拟光电眼、纠偏控制器和推动器组成,模拟光电眼技术由本公司自主研发并已经申请获得国家发明专利为目前独创技术,结合推动器使用日本三洋电机使该控制系统性能超越目前市场同类产品。
首先本模拟在使用时请注意以下各事项:1、搬运和安装请不要让本装置从高处跌落及受到强烈碰撞。
请不要在装置上面踩踏及放置重物,否则会造成装置的损坏和出现故障。
装置内部不能放入金属片等导电异物和油等可燃性异物,否则会引起火灾、装置的损坏和出现故障。
请在本手册注明的环境下使用,不要置于高温多湿、多尘、腐蚀性请按本手册所述安装,否则可能会出现故障。
对不适合安装在必须防爆型才能使用的场合。
警告:气体的地方、避免震动、冲击,否则容易发生触电火灾及故障本装置没有防爆类型,本机绝 接线和检查必须由专业技术人员进行,否则可能引起触电事故。
连接电缆的破损、不合理的外加应力、承载重物和安装在狭小空间 请不要将电源连接电缆的端子用作隔离,否则可能发生触电、故障和火灾。
2、接线危险:注意:3、试运转调试和使用危险:必须进行接地处理,否则会造成触电里,都是发生触电的原因。
请连接到额定电压的电源上,否则会引起火灾、装置的损坏和故障。
请不要用湿手操作开关,否则回造成触电。
请不要在通电时打开外壳,打开外壳后也请不要通电,否则有触电的危险。
目 录 前言安全注意事项第1章产品规格及安装尺寸 1-1 控制器规格及尺寸 1-2 模拟光电规格及尺寸 2-1 控制器使用说明 1-3推动器规格及尺寸 2-2 模拟光电使用说明 2-3 推动器使用说明 第2章产品使用与功能 第3章产品接线 3-1 产品接线示意图 3-2 控制器插头接线说明 3-3 光电眼插头接线说明 3-4 推动器插头接线说明 3-5 外接插头接线说明 1 1 3 3 4 5 6 6 8 9 10 10 11 11 11 11第4章产品核对 第5章保修·维护 12 12第1章 产品规格及安装尺寸1-1控制器规格及尺寸嵌入式安装立式安装检测方式光电反射式光 源高寿命LED发光管受光素子硅光电池响应速度0.01秒外壳材料铝工作环境重 量160g1-2模拟光电规格及尺寸温度0-40°C 湿度80%RH以下80四角棒型 号MGD-2-06工作电源DC 12V电 机推动方式滚珠丝杆转 速MAX3000转/分推 力约5000Kg 推动速度MAX30mm/s 推动行程150mm重 量8000g1-3推动器规格及尺寸型 号TMA-2-150、TMA-3-150直流伺服 80V/200W 、300W第2章 产品使用与功能 2-1 控制器使用说明11234567891011121314光电眼灵敏度指示平衡显示状态指示灯电源开关检测模式切换按钮左限位指示居中指示右限位指示自动模式指示手动模式指示正极性指示负极性指示检线指示检边指示1光电眼灵敏度指示电眼灵敏度调节旋钮显示光电眼两路模拟量输出值,调整可以使输出值增大或减少,正常工作时该值最佳范围为50-90之间。
BST纠偏系统调试手册1,按照接线图检查纠偏的接线,确定纠偏接线正确。
X6,端子40接GND,端子41接+24V2。
2,检查, 开关均在OFF状态。
3,检查DIL , 开关均在OFF状态。
4,传感器1,X1:端子2、3、4、5、6、7分别接棕、白、粉、绿、黄、灰线传感器2,X2:端子9、10、11、12、13、14分别接棕、白、粉、绿、黄、灰线带位置反馈驱动器EMS17,X3:端子15、16、17、18分别接粉、绿、黄、灰线X7:端子42,43分别接棕、白线。
5,X16:端子81为公共端接+24V2,端子82接到PLC。
6,端子65接自动(UK222),端子64接回中(UK223),63接手动(UK221),62接0V2。
7,通过DIL 可以改变手动导向方向。
8,必须检查控制器是否处在“出场设置重置”状态,主要检查JX30跳线。
若是,必须取消。
具体设置方法见本文末尾9,进行参数初始设置如下:(1)传感器型号必须输入设置菜单。
(设置参数1到210)(2)开机调试前必须正确输入驱动器型号到设置菜单(设置参数3到数值102)步骤如下:①按下“MENU”,②通过“MINUS”或“PLUS”选择参数1或3③按下“SETUP”“ENTER”按键的指示灯亮起,同时“MENU”和“SETUP”按键的指示灯闪烁,液晶显示屏显示参数值设置④通过“MINUS”或“PLUS”设置参数到数值(参数1为210,参数3为102)⑤按下按键“ENTER”存储参数值按下“SETUP”取消输入,输入的参数值没有被存储。
原始参数保持未被更改状态,显示返回参数选择状态⑥按下按键“MENU”设置菜单关闭(3)开机调试前,必须完成以下操作:★把物料从现有的传感器观测范围中移去★清洁传感器镜头,主机设置如下:①同时按下“SET UP”和“MINUS”然后再松开这两个按键。
主机设置被激活。
②完全遮住传感器的镜头约2秒钟。
③传感器无遮挡至少2秒钟④按下按键“ENTER”。
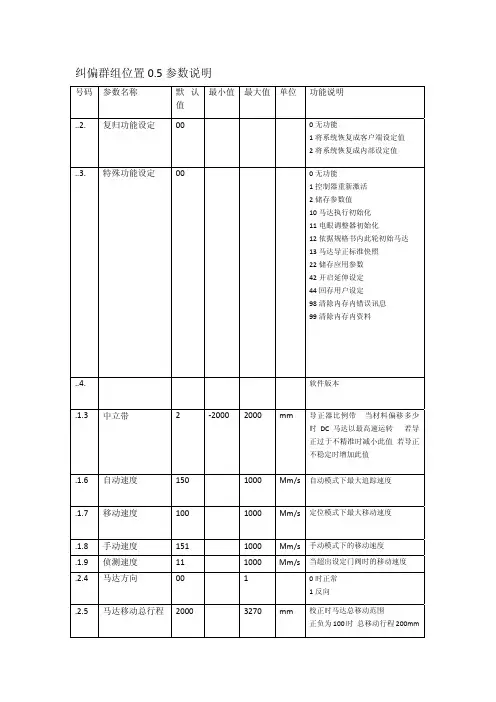
纠偏群组位置0.5参数说明号码 参数名称 默认值最小值最大值单位 功能说明..2. 复归功能设定 00 0无功能1将系统恢复成客户端设定值2将系统恢复成内部设定值..3. 特殊功能设定00 0无功能1控制器重新激活2储存参数值10马达执行初始化11电眼调整器初始化12依据规格书内此轮初始马达13马达导正标准快照22储存应用参数42开启延伸设定44回存用户设定98清除内存内错误讯息99清除内存内资料..4.软件版本.1.3 中立带 2 ‐2000 2000 mm 导正器比例带 当材料偏移多少时DC马达以最高速运转 若导正过于不精准时减小此值 若导正不稳定时增加此值.1.6 自动速度150 1000 Mm/s自动模式下最大追踪速度.1.7 移动速度 100 1000 Mm/s定位模式下最大移动速度.1.8 手动速度 151 1000 Mm/s手动模式下的移动速度.1.9 侦测速度 11 1000 Mm/s当超出设定门阀时的移动速度.2.4 马达方向00 10时正常1反向.2.5 马达移动总行程 2000 3270 mm 校正时马达总移动范围正负为100时 总移动行程200mm进入群组操作(参数更改完成后,1分钟即自动离开设定系统)操作按钮 显示状态 说明 SETUP+ 或. . 0. 进入系统或 . . 5. 1 2表示EPC电眼3表示LPC 电眼、4 前有‐号表现无装置5表示控制器入RK004. . 5. 进入群组5SETUP+ 或. . 0. 选择想查看的参数位置0.0 显示此参数位置的参数值或耿直参数值中位设定手动状态下 按手动 移动居中(进烘箱和出烘箱料膜料边与导向辊端面距离相同) 按SETUP+ 进入设定系统(显示 或 ) 再SETUP+ 一下 断电 重新上电后查看中位是否准确。
德国马头扭矩枪标定流程
德国马头扭矩枪的标定流程如下:
1. 准备工作:将马头扭矩枪和标准扭矩校验器放置在水平平台上,并将马头扭矩枪连接到标准扭矩校验器上;
2. 校正:按照马头扭矩枪厂家提供的操作说明进行校验,一般是利用调整其扭矩传感器旋钮来实现;
3. 标定:将标准扭矩校验器设定在需要校验的扭矩值上,然后使用马头扭矩枪在校验器上施加同样的扭矩,此时标准扭矩校验器应该输出与设定扭矩值相同的数据;
4. 计算误差:根据标准扭矩校验器输出的数据以及实际施加的扭矩进行计算,从而得到马头扭矩枪的误差值。
5. 调整:根据误差值,利用马头扭矩枪厂家提供的调整方法来调节马头扭矩枪,直到误差在允许范围内。
6. 检验:再次应用标准扭矩校验器检验调整后的马头扭矩枪的精度,并记录下标定结果。
需要注意的是,在进行标定的过程中,应该按照厂家的说明书进行操作,并在实验室合适的环境下进行,以保证标定结果的准确性和可靠性。
E L纠偏调试手册集团标准化办公室:[VV986T-J682P28-JP266L8-68PNN]成型机E+L-SVS纠偏系统安装调试手册目录:一,纠偏系统的组成二,纠偏系统的安装三,纠偏系统的配线四,纠偏系统的调试方法五,常见故障分析六,纠偏系统的区块图一、纠偏系统介绍成型机SVS定中纠偏系统零件:图1,马达外型图图2,电眼外型图图3,电眼线外型图图4 ,反光板外型图图5,接近开关外型图图6,接近开关固定座外型图图7,控制器外型图图8,电眼安装支架外型图二、纠偏系统安装1、马达安装方法首先将马达(马达料号:NR:230567)延长至机械长度(M=355mm)安装时,确认马达的机械中心与导正架(滑轨)的机械中心重合。
2、接近开关安装方法确认一下两点后再安装接近开关: A,马达的机械长度M正好处在355mm。
B,导正辊处的滑块位于滑轨的中心处。
,安装方法:在马达机械长度(M=355mm)状态下,安装铁片边缘在接近开关中间位置,安装高度2-3mm 即可目的:在马达行进过程中,只有一次信号切换,通过计算与接近开关的位置,达到快速回中的目的3、系统配线见附件注意PLC输给E+L纠偏的控制信号与E+L纠偏的电源要共用零点三,纠偏的调试步骤检查E+L电源线和信号线是否为24VDC,确认没问题后,上电。
1、根据马达对RK4004 设定参数(按照以下方法进行检查,若参数不对,则修改)首先、安装不松手,按一下,显示。
0,继续按,至显示。
3,然后松开,此时显示0,再按至42,完成解锁功能。
其次----设定参数(1)按住不松手,显示。
4 , E+L(2)按住不松手,按至13(纠偏灵敏度),松开,按将其至(3)按住不松手,按至16(自动速度),松开,按至20(4)17参数为回中速度(5)按住不松手,按至24(电机方向),松开,按至1(6)按住不松手,按至25(电机总行程),松开,按至100(7)按住不松手,按至26(电机正行程),松开,按至30(8)按住不松手,按至27(电机负行程),松开,按至-30(9)按住不松手,按至34(编码器解析度),松开,按至8(10)按住不松手,按至35(减速比),松开,按至8(11)按住不松手,按至36(螺杆牙距),松开,按至5(12)按住不松手,按至48(最大电机转速),松开,按至2750(13)按住不松手,按至50(速度_P),松开,按至(14)按住不松手,按至51(速度_I),松开,按至(15)56 电流 4A时报警Err3)(16)按住不松手,按至57(电机电流),松开,按至(17)按住不松手,按至81(马达极限信号),松开,按至2(18)按住不松手,按至83(回中开关信号),松开,按至-3(19)按住不松手,按至84(自动信号),松开,按至14(20)按住不松手,按至85(对中信号),松开,按至11(更改为15)(21)按住不松手,按至86(手动信号),松开,按至15(更改为11)(22)97#参数0801(23)按住不松手,按至99(选择双电眼工作),松开,按至1(24)按住不松手,按至3,松开,按至10(给电机做初始化)(25)按住不松手,按此时,执行马达初始化,初始化后,按照上述方法,检查30,31号是否为0。
KUKA原点设定
步骤一:机器人停止运动
在进行原点设定前,需确保机器人停止任何运动。
如果机器人当前正在执行任务或者移动,需要先停止其运动。
步骤二:进入系统配置模式
进入KUKA机器人系统的系统配置模式。
这可以通过机器人控制面板上的相应按钮实现。
确保进入系统配置模式后,机器人处于静止状态。
步骤三:校准原点
在系统配置模式下,可以开始校准机器人的原点。
校准原点的方法有以下两种:
1. 手动校准:这种方法需要使用示教器手动移动机器人到所需
的原点位置。
通过按下示教器上的指定按钮,可以记录当前位置为
机器人的原点。
2. 自动校准:这种方法适用于配备了特殊设备的机器人。
通过
特殊设备自动测量机器人的位置,并将其设置为原点。
根据机器人类型和具体配置,选择合适的方法进行校准。
步骤四:保存设置
在完成原点设定后,确保将设置保存。
这样,每次系统启动时,机器人将自动返回到已设定的原点位置。
结论
通过以上步骤,您可以成功地进行KUKA机器人的原点设定。
请确保每次系统启动前,进行原点设定以确保机器人的精确定位。
注意:本文档仅提供了一般性的原点设定步骤。
请参考机器人
系统的用户手册和相关文档,了解更多详细信息和特定配置的要求。
KUKA机器人编程手册KUKA编程手册一、概述二、学习手动挪移在开始编程之前,用户需要了解如何手动挪移,以便对的运动范围、速度和方向有一个直观的感受。
手动挪移的步骤如下:1. 打开控制柜的电源开关,等待系统启动完成。
2. 在控制柜上选择“手动”模式,并按下“启动”按钮。
3.在操作面板上选择“轴”模式或者“空间”模式,根据需要调整速度百分比。
4.在操作面板上按住“死人开关”,并使用方向键或者摇杆来挪移的各个关节或者末端执行器。
5.在挪移过程中,注意观察的实际位置和目标位置,以及各个关节的角度和转速,避免发生碰撞或者超出极限。
6.在挪移完成后,松开“死人开关”,并将控制柜切换回“自动”模式。
三、项目配置在开始编程之前,用户需要对项目进行配置,以便将电脑和通过网线连接,并设置相关的参数和选项。
项目配置的步骤如下:1. 设置IP地址。
在控制柜上打开KUKA.ControlStudio软件³,并进入“设置”菜单。
在“网络”选项卡中,输入一个合适的IP地址(如192.168.0.10),并保存设置。
2.电脑和通过网线连接。
在电脑上安装KUKA.ControlStudio软件³,并进入“设置”菜单。
在“网络”选项卡中,输入一个与IP地址相同网段的IP地址(如192.168.0.11),并保存设置。
然后使用一根网线将电脑和控制柜连接起来。
3. 查找并打开项目。
在电脑上打开KUKA.ControlStudio软件³ ,并进入“文件”菜单。
在“打开项目”选项中,选择一个已经存在的项目或者创建一个新的项目,并“打开”按钮。
4. 项目配置。
在电脑上打开KUKA.ControlStudio软件³,并进入“项目”菜单。
在“配置”选项中,可以设置项目的名称、描述、版本、语言等信息,并保存设置。
5. 项目。
在电脑上打开KUKA.ControlStudio软件³,并进入“文件”菜单。
德国康比(KOLBE)锯骨机K430,K440操作规程一.设备启用使用操作机器之前,一定要仔细阅读本说明书。
同时请仔细阅读本手册第12-16页的图解说明。
1.设备只能在保护门关上并锁紧的情况下才能启动。
机器上部平行排列的两个开关中,绿色2号开关为启动开关,红色的1号开关为停止开关。
2.电路闸。
关闭电源开关或打开保护盖4秒钟内,机器将停止运转。
设备在完全停止后10秒钟内不会重新启动。
3.更换锯条1)关闭电源,等待喂料过程及设备完全停止运转。
2)打开盖板(26)(30)。
3)对于k430通过拉高轮式滑动桌面的锁紧装置(22),然后拉出轮式滑动桌面(6)。
4)通过转动手柄(10)拆卸带锯条(13)。
5)换上一个新锯条(13)6)将新锯条(13)装入刮板(19)之间并嵌入导向槽(16+17)内(注意锯条齿尖朝下)。
7)转动手柄(10)将锯条固定。
8)通过向左向右转动上部辊轮(14)以检查锯条运转是否正常。
9)锯条后部与辊轮边缘后部的距离应保持在2—3mm。
10)如该距离过大或过小,拧松星形阀(12)的锁头(11)来调整锯条的移动,将星形阀自右向左逐步使锯条调整到位,然后再锁紧星形阀(12)的锁头(11)。
11)插入并锁紧K440的轮式滑动桌面(6)。
12)盖上保护盖板(26+27)。
13)至此,该设备已调整到位,可以重新启动。
4.锯条导向槽锯条上下导向槽(16+17)采用抗磨损性的特质合金材料,使锯条能够在操作中滑动自如。
5.刮片锯条刮片(19)固定在刮片夹持器(20)上,清洁或更换时无需使用工具即可从伸缩杆(32)上取下刮片。
必须定期检查刮片(19),如不能正常工作将影响加工效果。
6.分份器上部的十字手柄(8)可用来调整操作过程中出现的分份器(7)停止运转。
如旋转十字手柄约4圈,可将分份器旋转90度并从前面取下。
7.操作台结构K440:锯骨机操作台的桌面可抬起以方便清洁所有设备零部件。
参考9-10页清洗说明。
AE 500纠偏系统控制器简明操作手册基本信息本手册中描述的是AE 500物料纠偏控制器的操作和显示界面,以及重要的操作步骤。
使用AE 500物料纠偏控制器前,务必了解相关操作方法,以避免危险和因不正确安装或操作而引起的系统损坏。
在对AE 500物料纠偏控制器进行调试和维护保养前,务必阅读使用说明书中的安全提示!本手册中所给出的数据仅用于举例(例如显示屏上的图示),另有说明的除外。
目录第一部分:操作面板1.1面板布局·······································4 1.2键盘功能·······································5 第二部分:操作模式选择 2.1 手动操作设定..................................6 2.2 自动操作设定..................................6 2.3 纠偏框架回中. (6)第三部分:控制器增益值设置3.1 控制器增益值调整 (7)第四部分:物料设置4.1自动传感器设定·······························8-94.2手动传感器设定································10 4.3定中自动传感器设定····························11 4.4定中手动传感器设定····························12 4.5 驱动器设定 (13)4.6版本显示······································14 4.7电机方向设5.1 电源接线····································16 5.2 传感器接线··································17-18第一部分:1.1面板布局1.2键盘功能功能按键描述操作模式选择手动纠偏模式自动纠偏模式框架回中模式定左单边纠偏定右单边纠偏对中纠偏纠偏模式选择﹢纠偏辊架的手动定位设置菜单在手动定位模式下手动将框架向左、向右移动在手动定位模式下进入“设置”菜单“保存”键“返回”键增益调整菜单纠偏盲区调整在自动定位模式下增益增加或者减小在自动定位模式下减小-增加纠偏盲区数值第二部分:操作模式选择2.1手动操作设定使用“手动定位模式”对纠偏辊架的位置进行手动调整。
1.进入“手动定位模式”。
或者 2. 移动纠偏辊架至所需的位置。
2.2自动操作设定使用“自动纠偏模式”进行定单边或定中心线的自动纠偏。
1.选择所需的纠偏模式:定左单边纠偏(传感器1)定右单边纠偏(传感器2)+ 定中纠偏。
2.进入“自动纠偏模式”。
2.3纠偏框架回中使用“纠偏辊架回中”移动纠偏辊架至设定的中心位置。
移动纠偏辊架至设定的中心位置。
第三部分:控制器增益值设置一般情况下,控制器的增益值只须在初始化时设置一次。
在运行过程中如果发生纠偏辊架颤动,可以按照以下流程对控制器的增益值进行优化调整。
使用“自动纠偏模式”进行系统的增益设置。
进入“自动纠偏模式”或者按“+”或者“—”增加/减小控制器的增益值,直至稳定。
第四部分:物料设置设定物料时,控制器将自动按照待纠偏物料的特性(例如:使用红外线传感器时不同物料的透明度,或使用超声波传感器时不同物料的超声波吸收率等)进行适配。
物料的设定可以选择自动或手动操作。
“自动物料设定”用于正常情况下传感器的亮/暗值的设定。
“手动物料设定”用于需要对特殊对比度进行采样的情况。
亮值/暗值的生成:亮值保持传感器的测量窗完全没有被遮盖,即传感器测量范围内没有物料。
暗值待纠偏物料完全遮盖传感器的测量窗。
4.1自动传感器设定1、将物料移出传感器范围,清洁传感器的测量窗。
2、选择左传感器或者右传感器。
或3.进入“设置”菜单。
4、在“设置”菜单中选择“自动物料设定”5、按照显示器中动画的提示,完全敞开选传感器的测量窗,测得的亮值将显示在显示屏上。
6、按照显示器中动画的提示,用待纠偏物料完全遮盖住所选传感器的测量窗,并保持约 2秒钟,测得的暗值将显示在显示屏上。
7、按“保存”键,保存测得的暗值和亮值。
所选传感器的物料设定结束。
4.2手动传感器设定1、将物料移出传感器范围,清洁传感器的测量窗。
2、选择左传感器或者右传感器。
3.进入“设置”菜单。
4、在“设置”菜单中选泽“手动物料设定”5、按照显示器中动画的提示,完全敞开所选传感器的测量窗,测得的亮值将显示在显示屏上。
6、按“保存”键,切换到暗值的学习。
7、按照显示器中动画的提示,用待纠偏物料完全遮盖住所选传感器的测量窗,并保持约2秒钟,待测得的暗值稳定的显示在显示屏上。
8、按“保存”键,保存测得的暗值和亮值。
所选传感器的物料设定结束。
4.3对中传感器自动设定1、将物料移出传感器范围,清洁传感器的测量窗。
2、选择传感器。
3.进入“设置”菜单。
4、在“设置”菜单中选泽“自动物料设定”5、按照显示器中动画的提示,完全敞开所选传感器的测量窗,测得的亮值将显示在显示屏上。
6、按照显示器中动画的提示,用待纠偏物料完全遮盖住所选传感器的测量窗,并保持约2秒钟测得的暗值将显示在显示屏上。
7、完全敞开传感器2的测量窗,测得的亮值将显示在显示屏上。
8、用待纠偏物料完全遮盖住传感器2测量窗,并保持约2秒钟,测得的暗值将显示在显示屏上。
9、按“保存”键,保存传感器2测得的暗值和亮值。
物料设定完成4.4对中传感器手动设定1、将物料移出传感器范围,清洁传感器的测量窗。
+ 2、选择左传感器和右传感器3.进入“设置”菜单。
4、在“设置”菜单中选泽“手动物料设定”5、按照显示器中动画的提示,完全敞开所选传感器的测量窗,测得的亮值将显示在显示屏上。
6、按照显示器中动画的提示,用待纠偏物料完全遮盖住所选传感器的测量窗,并保持约2秒钟,测得的暗值将显示在显示屏上。
7、按“保存”键,保存传感器1测得的暗值和亮值。
8、完全敞开传感器2的测量窗,测得的亮值将显示在显示屏上。
9、用待纠偏物料完全遮盖住传感器2测量窗,并保持约2秒钟,测得的暗值将显示在显示屏上。
10、按“保存”键,保存传感器2测得的暗值和亮值。
物料设定完成4.5驱动器设定1. 进入“手动定位模式”2、进入“设置”菜单,显示3、选择“驱动器设置”菜单,界面显示:执行器最大行程的设置:4、按住,执行器应向传感器 1 方向移动,当电机堵转标志()变成红色时()或执行器不能再移动时,说明执行器走到了左极限位置。
5、此时按下6、此时按着,按钮变成,记录左极限位置。
按钮,执行器向传感器2 的方向移动,当电机堵转标志()变成红色时()或执行器不能再移动时,说明执行器走到了右极限位置。
7、此时按下8、按下,按钮变成,记录右极限位置。
按钮,保存执行器最大行程的设置。
自定义行程的设置:9、在最大行程设定完成后,重复步骤4、5、6、7、8可进行自定义行程的设置。
自定义的行程总小于或等于执行器的最大行程。