经纬仪操作手训练模拟器结构设计
- 格式:pdf
- 大小:201.02 KB
- 文档页数:3

92工业安全与环保2013年第39卷第9期I ndus t r i al Saf et y a nd Envi r onm e nt al Pr o t ect i on Sep t em b er2013有限空间作业训练模拟器的设计吴洋天、片(北京隆科兴非开挖工程有限公司北京100142)摘要有限空间作业训练模拟器对于培训与演练有限空间下作业人员,提升作业人员的自救能力具有重要作用。
阐述了有限空间作业训练模拟器的设计目的、创新点、设计原理、系统架构、功能设计、技术路线、使用效果等。
关键词有限空间作业安全模拟器培训演练D es i gn of Li m i t ed Space O per at i on n蛐Si m ul at orw uY ang(蛾Long妇x/nfd凰础n E ng/nee dng Co.,删.蜥100142)A b s t r act L i m i t e d s pac e oper a t i on t r ai ni ng si m ul at or is i m por t ant t o t r ai n a nd exe r ci se ope r at o r s i n l i m i t ed s pa ce a nd i m-pr ovet he s df-hdp abi li t y of operat or s.,I ll i s pa p e r des cr i b es t he de si gn obj ec t i ves,i nnova t i on poi nt s,des i gn pr inci pl es,sys t e mf ra m e,func t i ons,t ec hni que s,use a nd80o n.K eyW or ds l i m i t eds pac e oper a t i on saf et y sim ulat or砌Il i ng。


水准仪及其使用方法高程测量是测绘地形图的基本工作之一,另外大量的工程、建筑施工也必须量测地面高程,利用水准仪进行水准测量是精密测量高程的主要方法。
一、水准仪器组合:1.望远镜2.调整手轮3.圆水准器4.微调手轮5.水平制动手轮6.管水准器7.水平微调手轮8.脚架二、操作要点:在未知两点间,摆开三脚架,从仪器箱取出水准仪安放在三脚架上,利用三个机座螺丝调平,使圆气泡居中,跟着调平管水准器。
水平制动手轮是调平的,在水平镜内通过三角棱镜反射,水平重合,就是平水。
将望远镜对准未知点(1)上的塔尺,再次调平管水平器重合,读出塔尺的读数(后视),把望远镜旋转到未知点(2)的塔尺,调整管水平器,读出塔尺的读数(前视),记到记录本上。
计算公式:两点高差=后视-前视。
三、校正方法:将仪器摆在两固定点中间,标出两点的水平线,称为a、b线,移动仪器到固定点一端,标出两点的水平线,称为a’、b ’。
计算如果a-b≠a’-b’时,将望远镜横丝对准偏差一半的数值。
用校针将水准仪的上下螺钉调整,使管水平泡吻合为止。
重复以上做法,直到相等为止。
四、水准仪的使用方法水准仪的使用包括:水准仪的安置、粗平、瞄准、精平、读数五个步骤。
1. 安置安置是将仪器安装在可以伸缩的三脚架上并置于两观测点之间。
首先打开三脚架并使高度适中,用目估法使架头大致水平并检查脚架是否牢固,然后打开仪器箱,用连接螺旋将水准仪器连接在三脚架上。
2. 粗平粗平是使仪器的视线粗略水平,利用脚螺旋置园水准气泡居于园指标圈之中。
具体方法用仪器练习。
在整平过程中,气泡移动的方向与大姆指运动的方向一致。
3. 瞄准瞄准是用望远镜准确地瞄准目标。
首先是把望远镜对向远处明亮的背景,转动目镜调焦螺旋,使十字丝最清晰。
再松开固定螺旋,旋转望远镜,使照门和准星的连接对准水准尺,拧紧固定螺旋。
最后转动物镜对光螺旋,使水准尺的清晰地落在十字丝平面上,再转动微动螺旋,使水准尺的像靠于十字竖丝的一侧。

经纬仪及角度测量第一节 角度测量原理角度测量包括水平角测量和竖直角测量,是测量的三项基本工作之一。
角度测量最常用的仪器是经纬仪。
水平角测量用于计算点的平面位置,竖直角测量用于测定高差或将倾斜距离改算成水平距离。
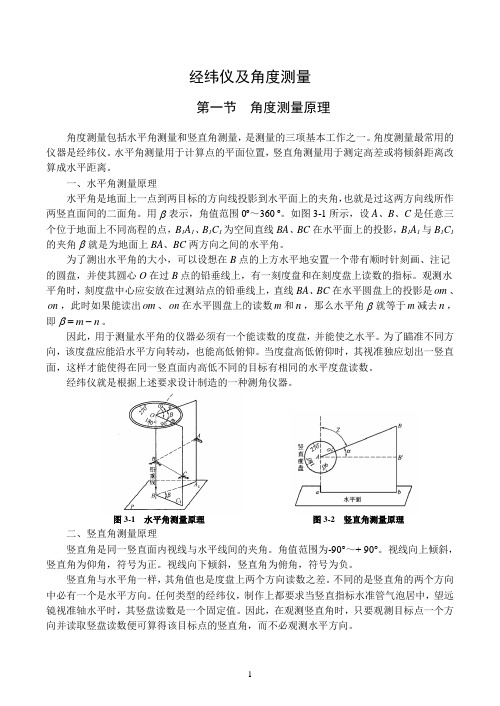
一、水平角测量原理水平角是地面上一点到两目标的方向线投影到水平面上的夹角,也就是过这两方向线所作两竖直面间的二面角。
用β表示,角值范围0º~360 º。
如图3-1所示,设A 、B 、C 是任意三个位于地面上不同高程的点,B 1A 1、B 1C 1为空间直线BA 、BC 在水平面上的投影,B 1A 1与B 1C 1的夹角β就是为地面上BA 、BC 两方向之间的水平角。
为了测出水平角的大小,可以设想在B 点的上方水平地安置一个带有顺时针刻画、注记的圆盘,并使其圆心O 在过B 点的铅垂线上,有一刻度盘和在刻度盘上读数的指标。
观测水平角时,刻度盘中心应安放在过测站点的铅垂线上,直线BA 、BC 在水平圆盘上的投影是om 、on ,此时如果能读出om 、on 在水平圆盘上的读数m 和n ,那么水平角β就等于m 减去n ,即n m -=β。
因此,用于测量水平角的仪器必须有一个能读数的度盘,并能使之水平。
为了瞄准不同方向,该度盘应能沿水平方向转动,也能高低俯仰。
当度盘高低俯仰时,其视准独应划出一竖直面,这样才能使得在同一竖直面内高低不同的目标有相同的水平度盘读数。
经纬仪就是根据上述要求设计制造的一种测角仪器。
图3-1 水平角测量原理 图3-2 竖直角测量原理 二、竖直角测量原理竖直角是同一竖直面内视线与水平线间的夹角。
角值范围为-90°~+ 90°。
视线向上倾斜,竖直角为仰角,符号为正。
视线向下倾斜,竖直角为俯角,符号为负。
竖直角与水平角一样,其角值也是度盘上两个方向读数之差。
不同的是竖直角的两个方向中必有一个是水平方向。
任何类型的经纬仪,制作上都要求当竖直指标水准管气泡居中,望远镜视准轴水平时,其竖盘读数是一个固定值。

竭诚为您提供优质文档/双击可除经纬仪的认识与使用实验报告篇一:实验二经纬仪的认识与使用实验二经纬仪的认识与使用1.目的(1)了解DJ6光学经纬仪的基本结构及主要部件的名称和作用。
(2)掌握经纬仪基本操作和读数方法。
2.组织每组8一10人。
每组每位同学完成经纬仪的整平、对中、瞄准、读数工作各一次。
3.学时课内2学时4.仪器及用具每组DJ6光学经纬仪1台、花杆2个。
5.实验步骤提要整平、对中经纬仪——瞄准测钎——读水平度盘。
5)学会DJ6光学经纬仪的读数方法。
读数记录于“读数记录表”中。
6)练习配置水平度盘的方法。
7.实验记录及上交资料:每人交1份实验报告。
实验三测回观测法测水平角1.目的1)掌握水平角观测原理,经纬仪的构造及度盘读数。
2)掌握测回法测水平角的方法。
2.组织每组4-5人,每人用测回法完成一个水平角的观测任务。
3.学时课内2学时4.仪器及用具:每组DJ6光学经纬仪1台、花杆2个、记录板1个。
5.实验步骤提要1)度盘配置:设共测n(n=4或5)个测回,则第i个测回的度盘位置为略大于(i-1)×180°/n。
2)一测回观测:(1)盘左:瞄准左目标A,进行读数记a1;顺时针方向转动照准部,瞄准右目标b,进行读数记b1;计算上半测回角值β左=b1-a1。
(2)盘右:瞄准右目标b,进行读数记b2;逆时针方向转动照准部,瞄准左目标A,进行读数记a2;计算下半测回角值β右=b2-a2。
左-β右)/2。
(3)检查上、下半测回角值互差是否超限。
计算一测回角值β=(β3)测站观测完毕后,当即检查各测回角值互差是否超限,计算平均角值。
6.注意事项1)瞄准目标时,尽可能瞄准其底部,以减少目标倾斜引起的误差。
2)同一测回观测时,切勿转动度盘变换手轮,以免发生错误。
3)观测过程中若发现气泡偏移超过一格时,应重新整平重测该测回。
4)计算半测回角值时,当左目标读数a大于右目标读数b时,则应加360°。

经纬仪的使用说明书说明书和操作技巧满意答案好评率:100%J6、J6E光学经纬仪使用说明书一、仪器的用途和特点本仪器的测角精度:水平方向一测回的方向误差不大于±6";天顶距测量中误差不大于±9",适用于低等控制测量,地形测量,矿山测量和工程导线测量等。
本仪器具有下列特点:1、望远镜采用内调焦系统(J6E 为正像内调焦系统),主物镜为三片分离型结构。
分划板设有双丝和单丝,便于照准不同目标,水平和垂直分划丝上均有供测距用的视距丝。
望远镜孔径大,鉴别率高,成像清晰,用于观测远近目标均适宜。
2、度盘读数采用光学带尺读数系统,在同一视场内可同时直接读取水平角和天顶距,并公用一个照明系统,使用方便,读数快速、精确。
3、对点器系一小型望远镜,用于对地面点进行观测,其物镜可随照准部转动;易于发现和消除对点误差,仪器还附有测锤,便于在不同条件下的对点工作。
4、竖轴采用强制定心球面导轨滚珠支承的半运动式轴系(结构示意图见下图),定向及置中精度高,对温度不敏感,不易卡死。
由于强制定心和大型球面滚珠支承的摩擦力距较大,运转时有轻微“沙沙”声,但绝不影响使用。
5、基座内设有防偏扭簧片,通过此簧片将基座上、下体作半刚性联接,可防止扭转,消除偏扭误差。
6、按用户要求可提供管状定心磁针。
7、仪器出厂前均经环境模拟试验和防霉、防雾处理,经久耐用。
仪器可在-25°C ~+40°C 环境温度下工作。
二、仪器的主要技术参数望远镜成像 J6 倒像 J6E 正像放大率 J6 28倍 J6E 29倍物镜有效孔径 40毫米视场角1°20′视距乘常数 100视距加常数 0鉴别率<3.6″调焦范围 2米~∞物镜壳外径φ46-0.05毫米望远镜长度 180毫米显微镜放大率水平读数系统 73倍竖直读数系统 74倍读数系统水平度盘分划直径 93.4毫米水平度盘读数分划1′(估读6″)竖直度盘分划直径 73.4毫米竖直度盘读数分划1′(估读6″)水准器角值照准部水准器30″/2毫米指标水准器30″/2毫米圆水准器8′/2毫米光学对点器放大率 1.1倍视场角4°四、仪器的使用方法1、照准仪器在安置、对中、安平后,松开两制动手轮11和20(图一,下同),利用粗瞄准器12即可概略照准目标。

实验二认识经纬仪,练习测水平角和竖直角一、内容与要求1、认识J6级光学经纬仪的基本构造及主要部件的名称与作用。
2、掌握经纬仪安置及操作方法,学会水平度盘及竖直度盘的读数方法。
3、学会用测回法观测水平角并掌握观测数据的处理方法。
4、练习观测竖直角并掌握竖直角及竖盘指标差的计算方法。
二、仪器及工具J6级光学经纬仪一台,测钎二支,测伞一把。
三、方法与步骤1、认识经纬仪的基本构造认真听取指导老师讲解并记住经纬仪各部件的名称、作用、操作方法及注意事项。
2、练习经纬仪的安置及操作1)对中和整平:将三脚架安置在测站点上方,要求架头大致水平,挂上垂球,平移三脚架使垂球尖大致对准测站点,踩紧三脚架,并注意保持架头水平。
将仪器从箱中取出,放在架头上立即与中心螺旋相连接。
观察垂球尖与测站点是否对准,如不准则稍松连接螺旋,在架头上平移仪器,使之对准,最后拧紧连接螺旋。
转动照准部,使长水准管平行于任意一对脚螺旋的连接,同时相对旋转这两只脚螺旋,使水准管气泡居中;将照准部旋转90°,再转动第三只脚螺旋,使气泡居中。
如此反复调试,知道照准部转至任何方向,气泡在水准管内的偏移都不超过分划线的一格为止。
仪器有光学对中器时,先置三脚架头大致水平,架头中心需尽量靠近过测站中点的铅垂线;将仪器从箱中取出,放在架头上立即与中心螺旋相连接。
调节光学对点器目镜、物镜调焦螺旋,使视场中的标志圆和地面目标同时清晰;旋转脚螺旋,令地面点成像于对点器的标志中心;此时,因基座不水平而圆水准器气泡不居中;调节三角架腿长度,使圆水准器气泡居中;进一步调节脚螺旋,使水平读盘水准管在任何方向气泡都居中;从光学对点器中检查与地面点的对中情况,如对中误差仍较大可微松连接螺旋,令仪器作微小的平移精确对中。
注意:对中和整平相互影响,应反复进行,直到两者均满足要求为止。
2)瞄准:先用望远镜上的缺口和准星瞄准目标,使目标位于望远镜视场内,然后旋紧水平制动和竖直制动;转动望远镜的目镜螺旋,使十字丝清晰;转动物镜调焦螺旋,使目标影像清晰;转动水平和竖直微动螺旋,使目标被十字丝单根纵丝精确平分,或被双根纵丝准确的夹在中央。

《装备维修技术》2021年第15期某两柄装甲车操作训练模拟器的设计与实现分析张华锋(合肥威艾尔智能技术有限公司,安徽 合肥 230000)摘 要:装甲战车是一种复杂的军事装备,上面装有比较多的武器和传感器,能够完成越野行驶,也可以和其他装甲战车、兵种协同作战。
为了能够更好的发挥出装甲战车的实际应用作用,需要在熟悉战场实际情况的基础上开展有效的装甲战车训练模拟。
关键词:装甲车;操作训练;模拟器;设计;实现从军队训练技术领域的发展实际情况来看,还没有拥有成熟的轮式装甲车驾驶训练模拟器,装甲车使用培训工作仅仅停留在实车训练上,不仅浪费了资源,而且也降低了车辆的使用寿命,更没有为装甲车驾驶训练模拟配备告诉执行的人员,最终导致装甲车的使用率不高,无法充分发挥其在军事作战中的应用作用。
为了能够解决装甲车驾驶训练的技术问题,文章提出一种适用于驾驶员培训的轮式装甲车驾驶训练模拟器,并从基本设计和技术实现两个方面具体分析装甲车操作训练模拟器的应用。
1轮式装甲车驾驶训练模拟器基本设计1.1驾驶座舱在驾驶座舱内部配备了驾驶员使用的各个操作器件、观察仪表、指示灯、道路显示灯等,和实车的基本配置一致。
轮式装甲车驾驶训练模拟器驾驶座舱由以下几个部分组成:第一,驾驶操作装置。
驾驶操作装置涉及到方向盘、油门踏板、离合器踏板、脚制动踏板、变速杆、驻车制动杆、前后驱动装置、模拟装置、传感器等。
第二,图形观察窗。
图形窗口能够显示出计算机启动过程,并显示选择道路菜单,将驾驶人员行驶工程中的图像充分展现出来,一切观察窗口提供的水平机械角度在三十度左右,提供的道路图视角在六十度左右。
第三,仪表板。
与实车一样可以通过仪表观察行车中车速、发动机转速、脚制动压力及各种操作显示灯等。
第四,鼠标球。
鼠标球是用来选择不同训练科目和完成一些特殊功能,为 4D 高级鼠标球。
用鼠标球移动指针到训练科目按扭,单击左侧键该按扭变成红色并进入该训练科目。
驾驶过程中,单击鼠标左侧键车辆复位,即车辆回到出发线;单击右侧上键改变驾驶员观察道路的视点。
第41卷第6期2019年12月指挥控制与仿真CommandControl&SimulationVol 41㊀No 6Dec 2019文章编号:1673⁃3819(2019)06⁃0136⁃05某远火武器系统操作与维修训练模拟器设计黄少罗,陈㊀烁,曹立军(陆军工程大学石家庄校区,河北石家庄㊀050003)摘㊀要:为有效提升远火武器系统训练效益,降低装备损耗㊁延长使用寿命,设计了其操作与维修训练模拟器㊂该模拟器以主控分系统为核心,由实装操作分系统㊁虚拟装备分系统㊁联动分系统组成㊂主控分系统完成对系统整体工作状态的协调及各分系统的监测与控制;实装操作分系统完成装备操作训练;虚拟装备分系统完成虚拟装备操作㊁虚拟装备维修及考核评估等功能;联动分系统完成模拟器间的信息传输控制和转换㊂该训练模拟器的使用对提升相关专业院校教学水平及部队训练都具有重要意义㊂关键词:远程火箭炮;装备操作;虚拟维修;训练模拟器中图分类号:E939;E924 93㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀DOI:10.3969/j.issn.1673⁃3819.2019.06.025DesignforOperationandMaintenanceTrainingSimulatorofLong⁃RangeRocketGunHUANGShao⁃luo,CHENShuo,CAOLi⁃jun(ArmyEngineeringUniversity,Shijiazhuang050003,China)Abstract:Inordertoimprovetrainingbenefitsoflong⁃rangerockergun,reducetheequipmentwearandextendthelife,anoperationandmaintenancetrainingsimulatorisdesigned.Thesimulatorisbasedonmaincontrolsystem,whichincludese⁃quipmentoperationsystem,virtualequipmentsystemandcombinedsystem.Maincontrolsystemresponsibleforthewholesystemworkstateofcoordinationandthesubsystemmonitoringandcontrol,equipmentoperationsystemcompletetheequip⁃mentoperationtraining,virtualequipmentsystemcompletevirtualequipmentoperation,virtualequipmentmaintenanceandassessmentevaluationfunctions,combinedsystemcompletetheinformationtransmissionandconversionbetweensimulators.Thetrainingsimulatorusedtoenhancetherelatedprofessionalcollegeeducationlevelandunittrainingareimportant.Keywords:long⁃rangerockergun;equipmentoperation;virtualmaintenance;trainingsimulator收稿日期:2019⁃03⁃11修回日期:2019⁃04⁃15作者简介:黄少罗(1965⁃),男,湖南娄底人,博士,教授,硕士生导师,研究方向为装备保障理论与应用㊂陈㊀烁(1985 ),男,硕士㊂㊀㊀某型远程火箭炮武器系统(简称远火武器系统)是我军的重要装备之一,用于打击敌战役㊁战术㊁纵深内的各种集群器材和面积目标㊂其武器系统装备数量多㊁信息化程度高㊁操作规程严格,因此要发挥大威力远程压制作用,必须熟练掌握操作及维修技能㊂传统培训方式普遍存在训练效率低㊁装备损耗大㊁训练内容少等局限㊂利用模拟器可以营造一个逼真的训练环境,通过人为地设置各种训练科目,可实现安全㊁高效㊁不受各种条件限制地培训人员[1]㊂因此,设计远火武器系统操作与维修训练模拟器,对提升部队训练成效㊁强化维修人员技术保障能力,提高装备完好率,以及院校教学水平都具有重要意义[2]㊂1㊀训练需求分析与功能结构1 1㊀训练需求分析为解决远火武器系统实装训练中场地㊁经费㊁人员㊁时间等限制,并尽可能地贴近实战㊁贴近部队装备保障实际,短时间内迅速提高基层官兵的操作使用水平和维修保障能力㊂远火武器系统操作与维修训练模拟器训练科目的确定是在详细分析远火武器系统作战使用流程的基础上进行的,按照集结地域准备㊁开进㊁技术阵地准备㊁展开㊁发射阵地发射和撤出发射阵地六个阶段对操作训练㊁维修训练和武器系统联动训练的具体内容进行合理划分,并通过训练状态监控实时掌握操作人员的训练情况,采取量化打分评估方式,客观反映训练模拟器的综合效果㊂1 2㊀模拟器功能该模拟器可以完成对远火武器系统的操作训练㊁维修训练㊁系统联动训练㊁数据记录与训练评估等功能,是集战术指挥㊁射击指挥㊁作战保障指挥于一体的模拟训练平台[3]㊂1)操作训练功能模拟器能够完成武器系统的作战装备㊁保障装备等战前准备㊁开关机操作㊁战斗操作等操作训练内容,包含集结地域㊁技术阵地和发射阵地技术分队㊁战炮分队和指挥分队的全部技术检查㊁战斗操作等项目㊂操作训练符合装备训练大纲要求,使炮手熟练掌握发射第6期指挥控制与仿真137㊀操作规程,锻炼炮手协同配合的能力㊂2)维修训练功能通过主控分系统设置故障,维修人员在实装面板㊁终端显示器上观察㊁判断故障现象;在实装操作分系统及虚拟维修训练分系统进行故障分析和定位排除训练㊂训练深度定位在部队(基层)级维修,以换件㊁换板㊁换组合维修为主㊂3)系统联动训练功能通过仿真交互平台将远火武器系统操作与维修模拟器各分系统进行互联,实现远火武器系统间的通信组网㊁目标信息的引导与传输㊁远火的标定与随动㊁射击诸元的输出与开火控制等联动训练㊂4)数据记录与训练评估模拟器能对受训人员训练过程中的操作动作㊁操作时间和操作效果进行记录,通过任务下达和训练初始化㊁判断故障㊁交互式测量与故障诊断㊁提交训练报告4个环节,判断使用者的分析思路和诊断方法,结合用时长短㊁操作状态判定㊁操作信息的逻辑关系等综合确定各种因素的权重,给出合理的定量评估结果㊂1 3㊀模拟器结构远火武器系统操作与维修训练模拟器由主控分系统㊁实装操作分系统㊁虚拟装备分系统和联动分系统组成,各分系统通过主控分系统连接形成一个有机的整体,在主控分系统的统一协调控制下工作,主控分系统通过局域网的方式完成与各分系统交互平台相通,其组成框图如图1所示㊂图1㊀远火武器系统操作与维修训练模拟器体系结构框图模拟器通过分布式交互平台接收连射击指挥车模拟器发送的射击口令并计算诸元后,采用与实装相同的弹道解算模型解算火炮射击诸元,并进一步根据解算得到的射击诸元进行调炮并射击㊂2㊀模拟器功能实现2 1㊀主控分系统主控分系统是远火武器系统操作与维修训练模拟器的控制核心㊂由于远火武器系统工作状态复杂㊁故障现象多样㊁控制关系复杂,相互联系紧密且具有严格的逻辑关系,因此必须全面准确地在各个分系统上将远火武器系统正常工作状态和故障现象等同步实时地模拟出来㊂根据各分系统之间的控制㊁逻辑关系,将整个模拟器以各个分系统为单位分成多个部分,每部分相对独立,以主控分系统为核心,通过中央控制板及相应的网络接口,实现对各个分系统面板开关量㊁可调控变量等的监控,完成远火控制系统各分系统的控制及整体工作状态的协调[4]㊂2 2㊀实装操作分系统对于远火武器系统这样的复杂装备,其操作训练及维修训练过程十分复杂,故障涉及的电路复杂,元器件繁多,要达到较好的训练效果,必须提供接近实装的物理环境㊂实装操作分系统是装备操作使用训练的平台,为保证操作训练的真实性,按照1ʒ1的比例进行研制,其结构布局㊁工作过程㊁工作状态以及软件界面应与实装完全一致㊂实装操作分系统采用半实物仿真,其操作面板与远火控制系统的物理面板完全一致,作为基本硬件环境,建立一个逼真的人机交互操作界面(环境)㊂2 3㊀虚拟装备分系统虚拟装备分系统是模拟器的虚拟仿真系统,以虚拟式装备结构为基础,配合虚拟测试仪器㊁真实测试仪器和专用信号发生器构成[5],主要包括火箭炮和装填车装备结构原理动画㊁虚拟装备操作㊁虚拟装备维修㊁考核评估㊁系统使用帮助等单元㊂该系统由计算机模拟仿真火箭炮和装填车组合内部结构㊁电路板结构以及实现各组合的逻辑控制,从而构成系统完整的工作环境[6]㊂利用系统提供的虚拟测量工具,对计算机显示器上的三维组合电路㊁电路板进行模拟测量,能够对故障进行诊断㊁隔离和定位,实现维修训练㊂利用计算机数据库技术,实现对训练过程的记录,为判定和分析提供数据㊂其功能结构如图2所示㊂图2㊀虚拟分系统功能结构图2 4㊀联动分系统联动分系统功能用于完成各单装模拟训练系统与其它装备模拟训练系统的互联㊁信息传输控制和转换,138㊀黄少罗,等:某远火武器系统操作与维修训练模拟器设计第41卷主要包括各单装模拟训练系统之间的通信协议和接口㊂信息传输控制器接收主控分系统指令,完成系统互联链路的状态控制和信道控制㊂3㊀硬件与软件设计3 1㊀系统硬件设计远火武器系统操作与维修训练模拟器的硬件设计主要指的是实装操作分系统的硬件设计㊂实装操作分系统设计的主要任务是构造和真实火箭炮控制系统相同的物理面板㊂系统必须构造一个真实的火箭炮控制系统物理环境,而火箭炮控制系统物理环境主要是火箭炮控制系统物理面板及相应的器件㊂面板控制系统由模拟器各个组合内的面板控制电路组成,负责各个组合面板上的开关㊁旋钮㊁电位器㊁手轮㊁仪表㊁指示灯等状态信息的获取和控制,以实现实装功能的模拟㊂实装操作分系统硬件部分结构如图3所示㊂3 2㊀软件设计系统硬件层与软件层之间的关联关系如图4所示㊂1)驾驶子系统,包括驾驶硬件设备和驾驶软件模拟模块㊂驾驶硬件设备采用模拟方向盘,用于实现驾驶操作的输入;驾驶模拟软件模块用于实现在虚拟场景中进行驾驶,并采集实施的发动机转速㊁行驶速度㊁油量等数据㊂图3㊀实装操作分系统的硬件结构框图图4㊀系统硬件层与软件层之间的关系第6期指挥控制与仿真139㊀㊀㊀2)火控数据模拟子系统,包括空间信息转换模块和火控数据模拟模块㊂空间信息转换模块用以将在虚拟场景中采集的火箭炮坐标㊁速度㊁等数据转换为车载软件能识别的数据格式,并传递给火控数据模拟模块;火控数据模拟模块可模拟各种测量设备的测量数据㊁火控计算数据及通讯传输数据等㊂3)炮长㊁地控模拟软件模块子系统,用于实现与火控计算机及指挥系统的通信,读取飞行任务数据和操作开关信息,包括接收火箭弹回路检测㊁飞行任务参数㊁发射方式㊁发射弹数㊁参数装订㊁发射倒计时等各种地面发射控制系统目前状态信息,并能实时接收弹道解算㊁用炮㊁调炮㊁收炮等各种火控系统目前状态信息,并加以显示并过滤设置的数据,只把无故障的数据以串口通信的形式传递给通信设备㊂4)通信模拟子系统,包括操作台操作面板㊁通信设备和通信测试软件㊂操作台操作面板用以模拟实装上的操作台操作面板,它将对云台的操作信号发送给通信设备;通信设备包括通信服务器㊁通信线缆,其中通信服务器采用和原装备通信服务器一样的型号,是系统的通信枢纽㊂5)车载软件,用于为载体实时提供方向和位置信息,引导车辆行驶达到指定位置㊂6)仿真系统的软件系统,以编程工具BrolandC++Builder为平台实现㊂远火控制系统维修训练模拟器设计时采用分层次树形软件体系结构及面向对象的编程方法,构成整个软件框架模式㊂3 3㊀软件组成及工作流程图系统软件是模块式结构,它由如下若干程序块共同组成㊂1)系统管理软件;2)开关机操作训练模块;3)操作训练模块;4)检查调整训练模块;5)故障现象显示模块;6)故障诊断训练模块;7)远火控制系统组合㊁电路板结构视图库的建立与管理;8)测试点参数数据库的建立与管理;9)虚拟测量工具的管理程序;10)故障现象和故障点的设置程序;11)通信程序;12)测试过程控制程序;13)操作过程记录程序㊂系统软件组成及工作流程图如图5所示㊂图5㊀虚拟分系统功能结构图进入系统主界面后,首先进行网络连接,然后选择系统工作方式,可选择分系统单独工作方式㊁自主工作方式或联动工作方式,然后选择训练题目,包括操作训练㊁维修训练和联动训练可供选择㊂如选择操作训练科目,主要在实装操作分系统上完成,编制了开关机顺序㊁方法和步骤,训练人员开关机操作;设置装备检查调整科目;设置了快速测试检查科目及功能测试科目;产生模拟战场,进行开进展开训练㊂4㊀结束语本文从远火武器系统操作与维修训练需求出发,综合运用半实物仿真与虚拟现实技术,详细阐述了训练模拟器的实现过程㊂该模拟器研制完成后,基于实装操作分系统和虚拟装备分系统能完成相关科目的操作训练以及维修训练㊂依据本文给出的方法,我们已经建立了初步的远火武器系统操作与维修训练模拟器㊂基于虚拟仿真技术的远火武器系统操作与维修训练系统作为一种重要的配套设备,提供了通用㊁优良的的维修平台,符合武器装备信息化建设的需求,对探索武器装备维修工作新途径有一定参考作用㊂同时在其他相关领域也具有广阔的发展前景,值得开展深入细致的研究㊂140㊀黄少罗,等:某远火武器系统操作与维修训练模拟器设计第41卷参考文献:[1]㊀冉跃龙,闫英敏,吕秀平.虚拟维修技术综述[J].电子设计工程,2012,20(2):25⁃32.[2]㊀ArendarskiB,TermathW,MeckingP.MaintenanceofComplexMachinesinElectricPowerSystemsUsingVirtualRealityTechniques[C]ʊISEI2008ConferenceRecordofthe2008IEEEInternationalSymposiumonE⁃lectronicInsulation,2008.[3]㊀胡文华,赵喜,段修生,等.某型火控雷达维修训练模拟器设计与应用现实关键技术研究[J].计算机测量与控制,2016,24(9):143⁃145.[4]㊀朱元昌,邸彦强,全厚德,等.通用雷达装备模拟训练系统及其关键技术研究[J].系统仿真学报,2005,17(11):2633⁃2674.[5]㊀李伯虎,王行仁,黄柯棣.综合仿真系统研究[J].系统仿真学报,2000,12(5):429⁃435.[6]㊀郝建平.虚拟维修仿真理论与技术[M].北京:国防工业出版社,2008:26⁃29.(责任编辑:胡志强)。

经纬仪使用说明经纬仪使用说明1.引言1.1 简介经纬仪是一种测量地球上任意点的经度和纬度坐标的仪器。
它通常由一个支架、一个旋转盘、一个水平仪、一个望远镜和一根十字线组成。
本文档详细介绍了经纬仪的操作步骤,以及常见问题的解决方法。
2.操作步骤2.1 设置经纬仪- 将经纬仪放置在平稳的表面上,确保支架稳固。
- 使用水平仪调整仪器的水平。
- 确保望远镜处于水平位置,调整焦距以获得清晰的视野。
2.2 定位目标点- 通过观察望远镜中的目标,找到您想测量的点。
- 使用十字线对准目标点,确保目标在十字线的中心。
2.3 测量- 通过旋转盘将望远镜固定在所测量的经度上。
- 使用旋转臂将十字线对准目标点的纬度。
- 记录测量得到的经度和纬度坐标。
3.注意事项3.1 避免干扰- 使用经纬仪时,应避免身体的大幅度运动和呼吸,以免产生晃动影响测量结果。
- 避免在强风或震动的地方使用经纬仪,以确保测量的准确性。
3.2 维护保养- 经常检查经纬仪的各部分是否松动或损坏,及时进行修复和更换。
- 合理使用经纬仪,避免摔落或碰撞造成损坏。
4.常见问题解决4.1 望远镜视野模糊- 调整望远镜焦距,确保视野清晰。
4.2 经纬仪固定不牢- 检查支架是否稳固,调整并加固支架。
4.3 十字线偏移- 使用旋转臂调整十字线的位置,确保对准目标点。
4.4 无法记录测量结果- 确保测量结果的记录设备正常工作。
5.附件本文档附带以下附件:- 经纬仪操作示意图- 维护保养记录表6.法律名词及注释6.1 经度经度是地球上一个点与本初子午线的夹角,用来表示东西方向上的位置。
6.2 纬度纬度是地球上一个点与地球赤道面之间的夹角,用来表示南北方向上的位置。

实训二__光学经纬仪的认识与使用《建筑工程测量》课程实验报告实训内容:实训二经纬仪的认识与使用专业班级:____________________________组长:___________组员:______________________ _________________________ _________________________ _________________________ ______________报告日期:________年_________月________日实训二一、光学经纬仪的认识与使用实验性质:验证性实验,实验时数安排为1 2学时。
目的和要求:⑴了解DJ6光学经纬仪的基本构造,以及主要部件的名称与作用。
⑵掌握经纬仪的安置方法,学会使用光学经纬仪。
仪器和工具:1.DJ6光学经纬仪1台、、测伞1把(可有可无)。
2.自备:铅笔、计算器、记录板1块。
方法步骤:(一)光学经纬仪⑴仪器讲解。
⑵安置仪器。
各小组在给定的测站点上架设仪器(从箱中取经纬仪时,应注意仪器的装箱位置,以便用后装箱)。
在测站点上撑开三脚架,高度应适中,架头应大致水平;然后把经纬仪安放到三脚架的架头上。
安放仪器时,一手扶住仪器,一手旋转位于架头底部的连接螺旋,使连接螺旋穿入经纬仪基座压板螺孔,并旋紧螺旋。
⑶认识仪器。
对照实物正确说出仪器的组成部分、各螺旋的名称及作用。
⑷对中。
对中有垂球对中和光学对中器对中两种方法。
方法一:垂球对中①在架头底部的连接螺旋的小挂钩上挂上垂球。
②平移三脚架,使垂球尖大致对准地面上的测站点,并注意使架头大致水平,踩紧三脚架。
③稍松底座下的连接螺旋,在架头上平移仪器,使垂球尖精确对准测站点(对中误差应小于等于3 mm),最后旋紧连接螺旋。
方法二:光学对中器对中(实训主要对中)①将仪器中心大致对准地面测站点。
②通过旋转光学对中器的目镜调焦螺旋,使分划板对中圈清晰;通过推、拉光学对中器的镜管进行对光,使对中圈和地面测站点标志都清晰显示。