第19卷第12期 上海铁道大学学报 Vol.19,No.12 1998年12月 J OURN AL OF SHA NGHAI TIEDAO UNIVERSITY Dec.,1998
逆变器电机系统能量回馈制动问题研究
万 艳 徐国卿 陶生桂
(上海铁道大学电气工程系,上海200331)
摘 要 对逆变器电机系统制动过程的有关能量转换的物理本质进行了阐述;提出了在系统设计阶段制
动工况下能量回馈的性能计算的方法,并进行了仿真计算。
关键词 逆变器,能量反馈,制动
分类号 TM464;TM343.3
在铁道干线及城市轨道交通领域,交流传动得到了前所未有的重视。异步牵引电动机作为动力执行单元,需要运行在牵引工况(将电能转化为机械能)或制动工况(将机械能转换为电能)下。这两种工况通过逆变器控制来实现。当逆变器提供的频率所对应的电机同步转速高于电机运行转速时,电机工作于电动(即牵引)工况;当前者低于后者时,电机工作于发电状态(一般称为制动工况)。逆变器电机系统可以回馈电能。在内燃机车交流传动系统中,这部分回馈的能量无法回馈到内燃机一端,因此需要中间直流支路配以制动电阻将其消耗。在电力机车车辆中,出于网压限制与安全性的考虑,大都采用(或配备)电阻制动单元。
本文着重讨论逆变器电机系统的能量回馈制动过程的物理本质及其制动工况的性能计算等。
1 逆变器电机系统在制动工况下的能量转换问题
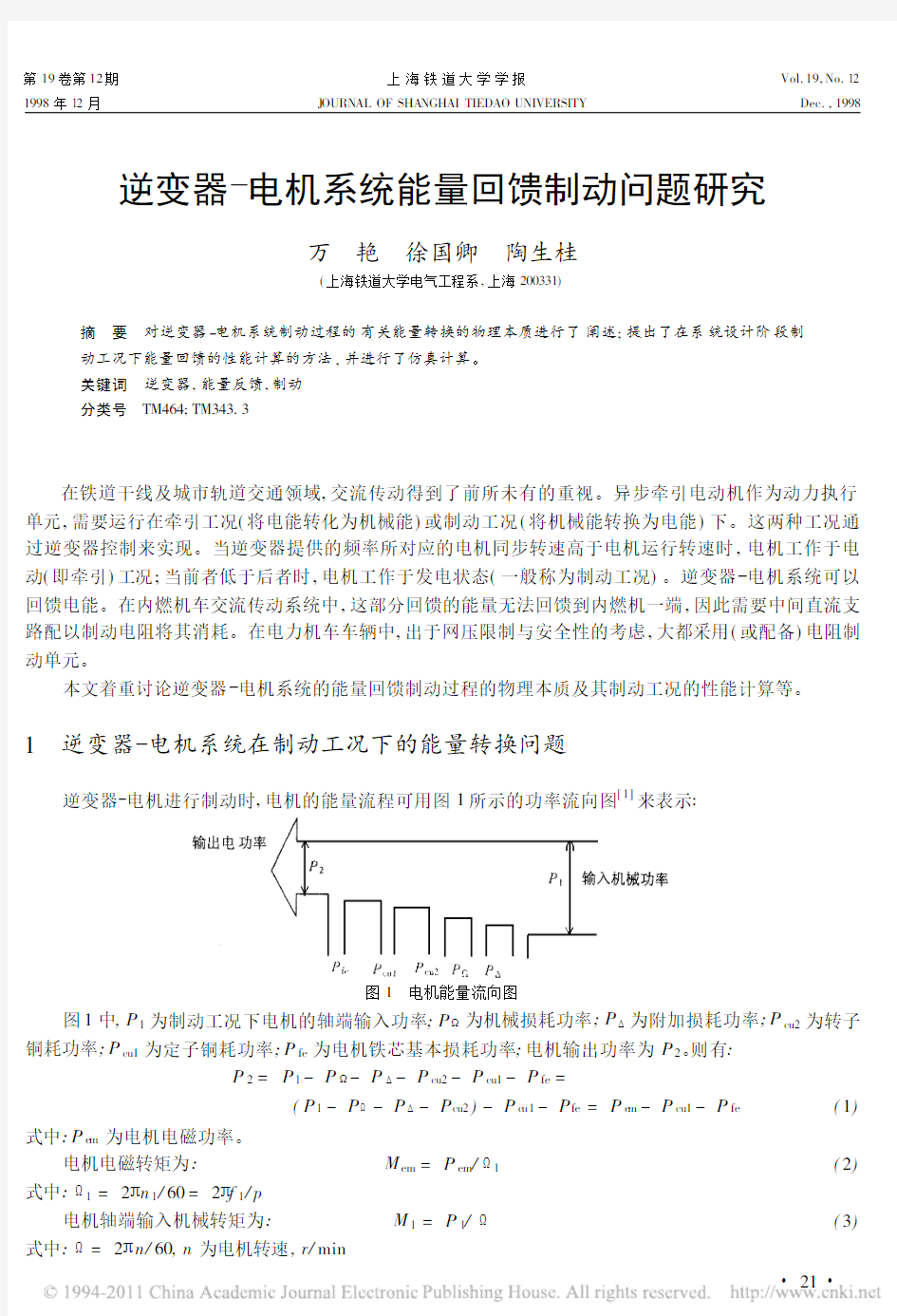
逆变器电机进行制动时,电机的能量流程可用图1所示的功率流向图[1]来表示:
图1 电机能量流向图
图1中,P1为制动工况下电机的轴端输入功率;P 为机械损耗功率;P 为附加损耗功率;P cu2为转子铜耗功率;P cu1为定子铜耗功率;P fe为电机铁芯基本损耗功率;电机输出功率为P2。则有:
P2=P1-P -P -P cu2-P cu1-P fe=
(P1-P -P -P cu2)-P c u1-P fe=P e m-P cu1-P fe(1)式中:P e m为电机电磁功率。
电机电磁转矩为:M em=P em/ 1(2)式中: 1=2 n1/60=2 f1/p
电机轴端输入机械转矩为:M1=P1/ (3)式中: =2 n/60,n为电机转速,r/min
21
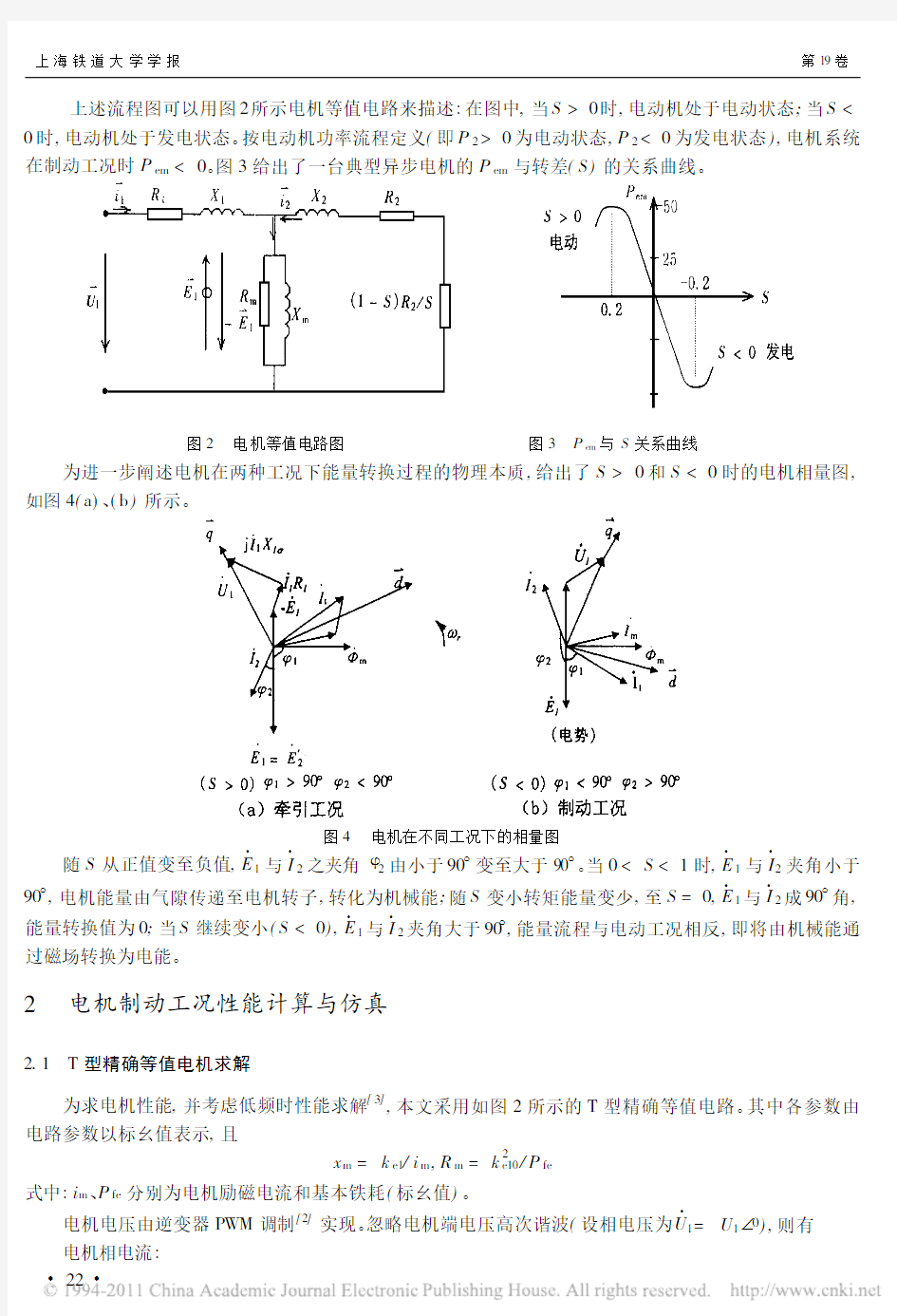
上述流程图可以用图2所示电机等值电路来描述:在图中,当S >0时,电动机处于电动状态;当S <0时,电动机处于发电状态。按电动机功率流程定义(即P 2>0为电动状态,P 2<0为发电状态),电机系统在制动工况时P em <0。图3给出了一台典型异步电机的P em 与转差(S)
的关系曲线。
图2 电机等值电路图 图3 P em 与S 关系曲线
为进一步阐述电机在两种工况下能量转换过程的物理本质,给出了S >0和S <0时的电机相量图,如图4(a)、(b )
所示。
图4
电机在不同工况下的相量图随S 从正值变至负值,E 1与I 2之夹角 2由小于90 变至大于90 。当0
1与I 2夹角小于90 ,电机能量由气隙传递至电机转子,转化为机械能;随S 变小转矩能量变少,至S =0,E 1与I 2成90 角,
能量转换值为0;当S 继续变小(S <0),E 1与I
2夹角大于90 ,能量流程与电动工况相反,即将由机械能通过磁场转换为电能。2 电机制动工况性能计算与仿真
2.1 T 型精确等值电机求解
为求电机性能,并考虑低频时性能求解[3],本文采用如图2所示的T 型精确等值电路。其中各参数由电路参数以标幺值表示,且
x m =k e1/i m ,R m =k 2
e10/P fe
式中:i m 、P fe 分别为电机励磁电流和基本铁耗(标幺值)。
电机电压由逆变器PWM 调制[2]实现。忽略电机端电压高次谐波(设相电压为U 1 =U 1 0),则有
电机相电流: 22 上海铁道大学学报 第19卷
I 1 =I p -j I R =A/(A 2+B 2)-j B /(A 2+B 2)
(4)电机转子电流:
I 2 =I 2p -j I 2R =C/(C 2+D 2)-j D/(C 2+D 2)
(5)A =R 1+
(aR 2/S )x m R m +x 2 x m R m b a 2+b 2(6)B =x 1 +x 2 x m R m a -(R 2/S)x m R m b
a 2+
b 2(7)
(a =x m R m +(R 2/S )x m +x 2 R m ,b =x m x 2 -R m (R 2/S )
C =(R 1+R 2/S)+x m (R 1R 2/S -x 1x 2)+R m (R 1x 2+x 1R 2/S )R m x m "中
:(8)D =(x 1+
x 2)+x m (x 2R 1+x 1R 2/S)+R m (x 1x 2-R 1R 2/S)
R m x m
!(P (9)图5 电机制动特性求解模块
电机输入电功率(负值):
P 2=U 1I 1p (10)电机输出功率(负值):
P 1=P 2-I 21r 1-P fe -I 22r 2-(P +P )(11)系统功率因素:
cos =I 1p /I 1(12)效率:
=P 1/P 2
(13)2.2 制动工况电机性能特性机车在制动工况时,电机的运行条件不同于一般的逆变器电机惯性负载系统。它在制动工况,端电压可以保持在一定范围内(并且是可控的)。因此,
有可能在电机制动时,其磁路运行在理想的工作
状态。另一方面,在城轨车辆运行中,对制动特性
也提出了新的要求(尤其是制动转矩要求)。如地
铁车辆的电机在牵引与制动工况时,制动电流会
略高于牵引电流。因此,进行制动特性计算,无论
对逆变器元件的选择以及控制方法和制动系统的
设计都有重要的作用,其计算精确性要求不亚于
牵引情况。
为使在制动工况下电机磁路工作于最佳状
态,逆变器控制须保证电机运行在恒磁能条件或
弱磁(恒功)条件下,且恒磁通条件下的磁通值与
电机对应频率下额定磁通相同,因此,在性能计算
中必须预先确定电机端电压(使之符合磁通要
求)。根据上述要求,给出了电机制动特性(恒磁通
条件下)的求解程序结构框图,如图5所示。
2.3 制动工况下逆变器电机系统稳态仿真
目前电机稳态性能计算(包括磁路计算),都是基于正弦供电电压条件下进行的。而在机车与城轨车辆交流传动系统中,电机电压由逆变器(电压型)控制,大都为PW M 波形或六阶梯波,电压为非正弦波。其高次谐波会对电机造成很大的影响,使电流峰值增大、电机产生转矩脉动、电机附加损耗增大等。 23 第12期 万 艳等:逆变器-电机系统能量回馈制动问题研究
为求非正弦供电下电机的各种响应,考虑谐波引起的转子集肤效应对电机性能的影响,本文采用改进的双反应模型[4]求解。即根据传输线理论,将转子导条假设为m 等份。也就是转子导条分层模型,每一分层用一集中参数表示;如果分层数m 足够,可以认为分散在各个分层中的电流值是相同的。该模型的梯形电路网络表示的电机瞬态等值电路图如图6所示。图中:V 1=j r1,V 2=j r2,V 3=j r3,V 4=j r4;R r1=R,R r2=5R ,R r3=9R,R r4=13R ;L r1=L ,L r2=3L /7,L r3=3L /11,L r4=3L /15。R 、L 为转子集
中参数。
图6 电机双反应模型(矢量模型)
于是,可得电机电压方程(空间矢量表示)为U s =R s i s + s 0=R r1i r1+ r1-j r r1
0=R r2i r2+ r2-j r r2
0=R r3i r3+ r3-j r r3
0=R r4i r4+ r4-j r r4
(14)0=R m i fe + m
磁链方程:
m =L m (i s +i r1+i fe )
s =(L m +L 1s )i s +L m i r1+L m i fe
r1=L m i s +L m i fe +(L m +L r1)i r1-L r1i r2
r2=-L r1i r1+(L r1+L r2)i r2-L r2i r3
r3=-L r2i r2+(L r2+L r3)i r3-L r3i r4 r4=-L r3i r3+(L r3+L r4)i r4
(15)电磁转矩为:T e =32PI m (i s *s )(16)
式中P 为电机极数。
求解上述方程,可获电机在非正弦供电下的各物理量,如磁通、电流、转矩、功率等。
3 计算实例
以一电机为例,用上述介绍的方法,求出电机在制动工况下的特性曲线。电机额定功率为850kW ,额
24 上海铁道大学学报 第19卷
定电压为2200V ,额定频率(f N )为82Hz ;电路参数为R 1=0.057086 ,R 2=0.030482 ,L 1=0.903924mH ,L 2=1.2654103mH ,L m =21.747293mH 。得各波形如图7~10
所示。
图7 制动工况转矩与频率关系曲线 图8
制动工况电流与频率关系曲线
图9 制动工况功率与频率曲线 图10 制动工况功率因数与频率曲线
用瞬态模型进行仿真,在六阶梯波供电,电机端电压电流(标幺值)磁链空间矢量波形见图11~13所
示。
图11 电机端电压波形 图12 电机相电
流波形
图13 电机气隙磁链的矢量轨迹 25 第12期 万 艳等:逆变器-电机系统能量回馈制动问题研究
上海铁道大学学报 第19卷
参 考 文 献
1 王毓东.电机学.浙江:浙江大学出版社,1995:13~19
2 刘竞成.交流调速系统.上海:上海交通大学出版社,1984:125~131
3 纳霍德金(苏).牵引电机设计.北京:中国铁道出版社,1983:170~178
4 Shehata M A,Hen tsche F.Effect of Current Displacement Consideration on the Behavior of Inverter-fed Squirrel-cage Induction
Motors.In:Electric M achines and Power Systems,1994:381~393
Research on Energy Feedback Braking
Question of Inverter-Fed Induction Motors
Wan Yan Xu Guoqing Tao Shenggui
(Dep t.of Electric Eng.,Shanghai Teidao Univ.,Shanghai200331)
Abstract The paper refers to the physics essential quality of energy conversion on energy feedback braking of inverte-fed induction motors.It introduces a method to calculate the feedback when the system is designed,and the simulation is provided.
Keywords inverters,energy feedback,braking
(收稿日期:1998-04-10)
(上接第16页)
参 考 文 献
1 关宝树.铁路隧道围岩分类.北京:人民铁道出版社,1978:2~48
2 关宝树.围岩分类的数量化研究.铁道学报,1988;(4):22~28
3 T BJ108-92 铁路隧道喷锚构筑法技术规则.1992:6~8
4 JB50218-94 工程岩体分级标准.1994:5~8
The Evaluation Method for Surrounding Rocks
Shen Zhongqi Guan Baoshu
(Dep t.of Civil Eng.,Southwest Jiaotong Univ.,Chengdu610031)
Abstract In this paper the evaluation method for surrounding rocks of tunnel on tunnelling is proposed.The the-ory is based on more than223numerical data which are got from field observa tion,and then the standard of evalu-ation for surrounding rocks has been established.
Keywords tunnel engineering,surrounding rocks,rock classification,quantitative evaluation
(收稿日期:1998-02-18)
26
逆变器驱动在电机中的运用 日益严格的国际法规、逐渐上涨的能源成本,以及对二氧化碳过量排放的关注,均是提高新型和现有工厂生产效率的关键因素。在某些设备中,可实现60%-70%的节省,而且投资回报率可在数月内实现,而非几年。多数情况下,电动机和泵能耗占工厂能耗一半以上,因而,这些往往是制定战略和计划生产过程各环节能源使用量的关键所在。需考虑的主要方面如下。 有效的功率因数校正将提高电网供电质量。这是交流(AC)驱动和交流-直流(AC-DC)电源器的重要考虑因素。为电感负载(例如电机)添加功率因数校正电容器(例如爱普科斯的PP薄膜型电容器),能适度提高能源效率,但在电力公司按照其费率结构处以低功率因数罚款时,可能带来显著成本节约。可采用自动功率因数校正系统,根据不同负荷条件切换内外电容器。 对于功耗测量,由于额外布线需求最小,无线功率计提供了快速简便的改造方案。在全球有超过13家供应商提供各种常规和无线功率计,其包括ABB、梅兰日兰和施耐德电气公司的产品。 现在,逆变器驱动(VSD)更为有效,主要原因是功率半导体方面的发展。部分单相交流驱动效率高达95%或以上。ABB、艾伦布拉德利、三菱、欧姆龙、派克、施耐德电气和西门子是高效率电机、驱动和控制器的领先供应商。RS Components提供单相和三相驱动,以及光谱较低电力端用自制直流伺服电机控制器。 尽管与泵和电机相联,但VSD也可用于提高气动系统的效率。预计在典型制造工厂内,气动使用10%-15%的电能,并控制空气供给,以使其随需求准确变化,能够在部分设备中直接节约高达30%的能源。当然,选择大小合适的作业用电机是优化系统效率最重要的因素之一。 欧洲标准EN 60034-30:2009定义了量程(2、4和6极)在0.75kW至375kW之内3相电机效率法律规定。自2011年6月11日起,此类电机必须达到IE2-高效率标准;并且从2015年起,应符合IE3-超高效标准。电机设计进步、轴承技术提高及电机控制智能化,是促使电机效率提高的主要因素。例如,电机重组用SKF深槽轴承比其他SKF轴承减少30%-50%的摩擦损失。这延长轴承寿命并提高了效率,无需花费成本便可更换整个电机。ABB生产的M3系列为三相电机是不错的选择,松下和帕瓦罗是单相应用程序的大众选择。 在过去几年内,用以提供工厂中电子系统正确操作条件的AC-DC电源供应器而言,其效率从约80%上升到95%。然而,值得注意的是,制造商常常引用满负荷下的效率数字。电源供应器在全负荷时引用效率图,因此,确保所选电源配置效率与实际应用匹配尤为重要。RS提供来自领导品牌的一千多种AC-DC电源供应器,包括爱斯太克、明纬及宝威。 当然,工厂维修对总能源效率有重大影响,特别是对于传输系统。在有效推动一条衰退传动链时具有一定局限性。对此,RS也可提供帮助,为您提供品种齐全的设施维修产品和设备。
关于直流电机及控制系统的基本知识 6、直流电机的四象限运行: 直流电机与交流电机一样,也有两种运行方式:电动运行和制动运行。如果再以正、反转来分的话,则分为正转运行、正转制动运行和反转运行、反转制动运行四种运行方式。如果以坐标形式来表示的话,则称为电机的四象限运行坐标,见下图4-5各种运行方式的机械特性曲线。 当电机正向运行时,其机械特性是一条横跨1、2、4象限的直线。其中1象限为电动运行状态,电磁转矩方向与旋转方向相同,第2、4象限为制动运行状态,在此状态内是产生一个与转向方向相反的阻力矩,以使拖动系统迅速停车或限制转速的升高。制动状态下转矩的方向与转速的方向相反,此时电机从轴上吸收机械能并转化为电能消耗于电枢回路电路或回馈于电源。第3象限为反向电动运行。
当电磁转矩T M与转速n同方向,T M是拖动负载运动的,所以电机运行曲线处于1、3象限,1象限为电机正向运行,3象限为电机反向运行;当T M与转速n的方向相反时,表示电机机处于制动运行方式,其机械特性曲线在坐标的2、4象限内,2象限内为电机正向制动,包含能耗制动过程(O A线段)、电源反接制动过程(-T M B线段)和正向回馈制动过程(-n0C)线段;处于第四象限时为电机反向制动,也包含能耗制动过程(O D线段)、倒拉反接制动过程(T M E线段)和反向回馈过程(-n0F线段)。 7、直流电机的启动、停止和制动控制: 直流电机从接入电源开始,电枢由静止开始转动到额定转速的过程,称为启动过程。要求启动时间短、启动转矩大、启动电流小。启动的要求是矛盾的,比如,用逐渐提升供电电压实施软起动,来降低起动电流,但启动时间又会加长;加大启动转矩,又势必增大的启动电流等。因而要根据实际应用和配置情况,对启动问题综合考虑。 1)启动方式: a、直接启动。只适用于小型直流电机。启动方法是先给电机加励磁,并调节励磁电流达到最大,当励磁磁场建立后,再使电枢绕组直接加上额定电压,电机开始启动。在启动过程中,电枢中最大冲击电流,称为启动电流。直流启动,因启动电流大,电气和机械冲击大等缺点,应用较少; b、早期采用变阻器启动,电动机在启动时在电枢回路中串入变阻器,用接触器触点切换电阻只数,限制启动电流。将启动电流限制在2位额定电流以内。后期采用晶闸管电子电力技术,用改变电枢电压的方式实现了软起动。 2)停止方式: a、自由停车。直流电机的电源关断后,电机按运转惯性自由停车; b、施加制动(刹车)措施,如机械抱闸刹车、能耗制动、反接制动等使其快速停车。 3)直流电机的制动方式和方法: 电动机的电磁转矩方向与旋转方向相反时,就称为电动机处于制动状态。 制动的目的:使电动机减速或停车、限制电动机转速的升高(如电车下坡)。 机械抱闸制动也是一种制动(刹车)方式,但不属电机运行特性的范畴。属于电机运行特性的制动方式和方法有以下四种,有时也统称为电磁制动方式。 a、能耗制动。指运行中的直流电机突然断开电枢电源,然后在电枢回路串 入制动电阻,使电枢绕组的惯性能量消耗在电阻上,使电机快速制动。由于电压和输入功率都为0,所以制动平衡,线路简单;
电梯能量回馈装置原理及检验内容探讨 摘要:近年来房地产热潮以及国家大张旗鼓的基础设施建设,带动了电梯业的发展。本文通过对电梯节能枝术基本原理的研究和对一种典型电梯能量回馈装置的检测,分析了电梯节能的实际效果,提出了电梯节能的必要性。 关键词:电梯;能量回馈装置;原理;检验内容。 一、前言 随着我国经济的快速发展,电梯的使用也越来越普遍,当然由电梯消耗的电能也日益增多,如何节约资源,降低能耗是我们研究的重点。在全球性能源紧缺,世界各国、各行、各业都在提倡绿色节能的今天,做好电梯的节能降耗意义重大。能量回馈技术节能效果明显,因此,针对电梯能量回馈装置原理及检验内容进行深入的研究和探讨。 二、能量回馈技术的分析与研究 1.电梯能量回馈技术的节能原理 有源能量回馈器主回路结构主要由滤波电容、串联电感、三相IGBT全桥和外围电路组成,如图1。电梯变频器的输入端和有源能量回馈器的输出端相连,有两个隔离二极管VD1和VD2与输入端相串联后与变频器的PN线相接。 图中虚线框内的控制电路的软件设计冗余度高,该电路是由外围信号采样器以及单片微机可编程逻辑芯片组成的,这种设计和结构能够使控制电路自动地识别三相交流电网的相位、相序、电流及电压的瞬时值,确保直流电可以立即回馈到交流电网,有序地控制智能功率模块即IPM的工作状态。 由于电梯在启动运行达到最高运行速度后具有最大的机械动能,电梯到达目标层前要逐步减速直到电梯停止运动为止,这一过程电梯就会释放机械动能。同时,曳引式电梯还是一个势能性负载,轿厢载重与对重装置之间有质量差时,电梯运行时会产生机械势能,特别是当电梯空载上行和电梯满载下行时均会释放出大量的机械势能。对于采用变频变压调速的电梯,运行中释放的机械能(含位能和动能)通过电动机和变频器转换成直流电能储存在变频器直流回路的电容中。此时电容就好比是一个小水库,回送到电容中的电能越多,电容电压就越高,如不及时释放电容中储存的电能,就会产生过压保护,最终导致电梯停止运行。目前国内绝大多数变频调速电梯采用制动电阻消耗电容中储存电能的方法来防止电容过电压,但这种方法不仅降低了系统能耗的效率,电阻产生的大量热量还恶化了电梯控制柜周边的环境。因此,电梯节能的第二类方法就是将运动中负载上的机械能(含位能和动能)通过专用装置变换成电能并回馈给交流局域电网,供附近其他用电设备使用,使系统在单位时间内消耗电量下降。从而达到节约电能的
能量回馈型电子负载的原理介绍 党三磊,丘东元,张波 (华南理工大学电力学院广州510640) Study on the Theory of Energy Recycling Electronic Load DANG Sanlei, QIU Dongyuan (Electric Power College, South China University of Technology, Guangzhou 510640, China) 摘要:能量回馈型电子负载是一种用于各种电源出厂试验的能够模拟实际电阻负载特性的新型电力电子装置。它能够实现对所模拟电阻值的无级调节,并能够实现电能的再生利用,具有节能、体积小、重量轻、节省安装空间、试验性能优良等优点。本文简要描述了交直流电子负载的结构、原理和控制方式,并对主要影响系统性能的PWM整流器的工作原理和控制方法进行了重点分析。 关键字:电子负载,能量回馈,PWM整流器ABSTRACT:The energy recycling electronic load is a new type power electronics instrument that can run with the same function as resistors in the all kinds of power source burn-in test. It can be regarded as a resistor whose value can change smoothly. The device saves energy by feeding burn-in test power back to the utility system. It is lighter, smaller and has a better performance in the test than the normal electronic load. This paper describes the structure, principle and control strategy of AC and DC energy recycling electronic load briefly. The principle and control strategy of the PWM rectifier are studied in-depth. KEYWORDS: electronic load, energy recycling, PWM rectifier 1引言 电子负载是指能模拟真实负载某些特性的电子设备,它不仅可模拟不同数值的电阻、电感、电容及它们的组合,而且可模拟非线性负载的某些特性。电子负载具有调节方便、通用性强、精度高、稳定性好等优点,是电源试验测试用负载的发展方向。电子负载作为电源测试的重要手段,随着电源测试集成化、一体化的发展趋势,其重要性越发明显。 能量回馈型电子负载既能模拟各种负载特性,又能将电能无污染的回馈电网,是当前电子负载发展的必然趋势。与普通电阻负载相比,它的工作方式是利用电力电子变换技术在完成测试功率实验的前提下,将被测电源的输出能量循环再生利用,既节约了能源又不产生大量的热量,避免了试验场所环境温度升高的问题。该电子负载未将试验功率转变为热能,因此不必使用体积庞大的电阻箱及冷却设备,节约了安装空间。由于采用的是能量回馈的方式,因此试验场所不必配备较大的电源容量,降低了供电容量的成本[1]。 本文分别介绍了交直流电子负载的结构,工作原理和相应的控制方式,并重点分析了PWM整流器的工作原理和不同控制方式的优缺点。 2能量回馈型交流电子负载 图1给出了单相能量回馈型交流电子负载系统结构图,采用具有中间直流环节的AC/DC/AC双级变换结构,分开控制电子负载的输入电流i u、输出电流i r,并且能使输入和输出工作在不同的频率满足某些特殊电源测试需要。AC/DC整流单元与DC/AC逆变单元均采用电压型PWM整流器,前级整流单元控制被测电源的输出电流i u,模拟被测电源需要的负载特性;后级整流单元控制直流侧电压V dc和并网电流i r。控制上前后级是解耦的,可以分开进行分析和设计[2]。
烟台南山学院 电机与拖动课程设计题目直流电动机的反接制动 姓名: XXX 所在学院:计算机与电气自动化学院 所学专业:自动化 班级:自动化XXXX 学号: XXXXXXXXXXX 指导教师:XXX 完成时间: 2013.12.20
目录 绪论 (1) 第一章直流电动机的制动 (2) 1.1 制动的定义 (2) 1.2 制动的目的 (2) 1.3 制动的分类 (2) 1.4 各种制动的特点 (2) 第二章直流电动机反接制动的工作原理 (3) 2.1 电压反向反接制动——迅速停机 (3) 2.1.1 制动原理 (3) 2.1.2 机械特性 (3) 2.1.3 特性分析 (4) 2.1.4 适用场合 (5) 2.2 电动势反向反接制动——下放重物 (5) 2.2.1 制动原理 (5) 2.2.2 机械特性 (5) 2.2.3 特性分析 (6) 2.2.4 适用场合 (7) 第三章反接制动制动电阻的计算 (8) 3.1 电枢电阻的计算 (8) 3.2 相关参数的计算 (8) 3.3 迅速停机 (8) 3.4 下放重物(以800r/min下放重物) (8) 结论 (9) 总结 (10) 参考文献 (11)
绪论 直流电动机是将直流电能转换为机械能的电动机。因其优良的起动、调速和制动性能而在电力拖动中得到广泛应用。 直流电动机按励磁方式分为他励、并励、串励和复励四种。 直流电动机有三种制动状态:能耗制动、反接制动(电压反向反接和电动势反向反接)和回馈制动。 本文在直流电动机的结构与工作原理的基础上,给出了电机制动的定义,对电机制动的方法进行了简单介绍,并着重介绍了他励直流电动机反接制动的工作原理、特点及使用条件。
新能源汽车电机逆变器Power HiL测试方案 新能源汽车电驱动系统的开发对业界来说是一个新的挑战,因为以往在传统的驱动系统开发上积累的测试规范和测试循环的相关经验并不能直接套用,并且需要新的流程。这是因为高电压部件的出现以及其要遵从国内和国际法规(比如ECE-R 100)和标准(比如IEC 61851)。汽车E/E 系统必须同时具备实用、耐久、安全、紧凑、轻量化以及高效的功率和低成本这些特点。这些要求施加了高复杂性,尤其在系统级别上。 随着测试技术的进步,Power-HiL的出现电子部件的LV-HiL及网络测试的之间的空缺。Power-HiL方法能够进行控制接口的仿真,和高电压、高电流、高功率的仿真,这些是与实际应用情况精确吻合的,并且是可以复现的。任何现实中缺失的部件都可以使用各种高电压的模拟器代替。它们能够按照特定模型、系统特定硬件和实际工作点,来生成相应的电压和电流。特别地,这种Power-HiL 的方法能够使得部件在不影响其他部件的情况下一直工作在特定工作点下。
德国Scienlab能够实现对电驱动系统从各模块到整个系统的递进式测试,而且是全电气化的功率级仿真测试。在过去的几年中,Scienlab的Power-HiL 测试环境成为了测试电力电子车辆部件系统的非常成功的产品。典型的应用领域包括能量存储、逆变器、充电技术以及车载电气系统和动力传动系统。 系统组成: 针对新能源汽车电机逆变器的实际特点和工作需求,Scienlab逆变器提供一个优化的测试方案,通过高品质的电机模拟器及电池模拟器仿真逆变器实际的交流和直流工作环境,对逆变器的软件和硬件进行功率级的测试,同时作为一个开放的平台,支持汽车行业主流的HiL系统(如dSPACE、ETAS、MicroNova等),支持主流的环境温仓。为了保护被测的逆变器、测试台架以及人员安全,Scienlab 还有专门的独立的安全保护系统来确保安全。 一、电机模拟器 电机模拟器可以模拟三相电机的电气特性,因而可以在没有真实电机的情况下对牵引逆变器进行操作和测试。电机模拟器可以工作在速度模式及负载转矩模
1.电动车用永磁无刷直流电动机电气制动分析与仿真 (1)反接制动电流大,不回馈能量;回馈制动可以设置适当的占空比,利用电感的升压 作用,向直流侧回馈能量。 (2)反接制动过程分析:续流电动过程,向直流侧电容回馈能量,电感释放能量;反接 制动过程,电感处于储能状态,电机吸收电功率,不能向直流侧回馈能量。 (3)回馈制动过程分析:续流制动过程,电感储能;回馈制动过程,电感释放能量,给 电源充电。 (4) e222RI 11D A B e RI E U D --- ≈= -- 端电压 此时假定I恒定;选择适当的占空比D值,就可以使开关管截止时,AB间的端电压大于电源电压,从而实现能量反馈。 如果忽略电枢电阻R,则, e2 11D A B e E U D - ≈= -- 端电压 (5)结论:如果快速制动,则可以采用反接制动,但是,需要采取相应的电流限幅措施; 对于频繁启动制动装置或者电动车而言,采用回馈制动,可以有效的回收能源。2.电动汽车制动与能量回馈技术研究 (1)当控制器接收到刹车信号时,电机从电动状态切换到制动状态。 (2) 回馈制动的控制原理是升压斩波,即在一个PWM周期内,如图4所示,当t0-t1时,绕组电感积蓄磁场能量,导致回路电流上升,此时的系统状态称为续流状态;当t1-t2时,定子绕组电感放电,向蓄电池充电,导致回路电流下降,称为充电状态.
(3) (4)当控制器工作在电动状态时,转把信号有效,刹车信号无效;当控制器工作在制动 状态时,转把信号无效,刹车信号有效。 (5)提出了一种简单有效的方法来实现直流无刷电机的制动与能量回馈。电动状态与制 动状态的切换通过控制器内部控制策略完成,无需做任何硬件变动.
摘要 本设计先介绍了他励直流电动机的工作方式,是为后面电动机制动作铺垫。对于制动,直流电机制动有很多种方式,一般有大致可分为三类,能耗制动,反接制动,回馈制动。他励直流电机能耗制动在工程上得到了广泛的使用,因为这种制动方式,简单可靠,安全经济。能耗制动原理其实就是将电流方向反向,产生相反的电磁转矩,从而产生一个与转速方向相反的力矩,达到减速制动的目的。在这次的设计中,我们着重讨论的是他励直流电机能耗制动。主要讨论关于能耗制动一些技术方面问题的分析与设计。 以两种方式讲解:图示法和公式法。在图示上直观的解释了他励直流电动机的停机过程,讲解了在不同的阶段,电动机的工作特性曲线的变动,在关键点的(电动机的瞬时态)讲解。在公式法中,我们将严格依据电动的工作特性曲线来讨论不同时态的变动,并且最重要的是在公式法中我们讨论了Rb的电阻要求,并讲解了为什么必须要串入电阻Rb。在下放重物的过程中方式同迅速停机一致,重点放在反向启动后,电动机的运行情况。并且运用之前所介绍的基础知识来讲解T,TL,To之间的关系。 关键词:能耗制动;迅速停机;放下重物;
目录 摘要................................................... I 1 设计任务和要求 .. (3) 1.1 设计任务 (3) 1.2 直流电动机的工作原理 (3) 1.3 他励电动机电路模型 (4) 2 他励直流电动机的机械特性 (5) 2.1 他励直流电动机固有机械特性 (6) 2.2 他励直流电动机人为特性 (6) 3 他励直流电动机的能耗制动 (8) 3.1 能耗制动过程——迅速停机 (9) 3.2 能耗制动运行——下放重物 (10) 4 能耗制动设计电路与参数确定 (13) 4.1 主电路与控制电路 (13) 4.2 电路参数确定 (14) 5 总结 (16) 参考文献..................................错误!未定义书签。
能量回馈技术与应用范例 一、技术简介 在电梯、矿山提升机、港口起重机、工厂离心机、油田抽油机等许多场合,都会伴随着负载势能、动能的变化。比如,提升机、起重机等在下放重物时势能会减小,离心机设备在停机时,动能会减小。而由能量守恒定律我们知道,能量是不会凭空消失的,那么这部分能量通过电机转换成为了再生电能。实际上,在采用变频调速的设备里,这部分电能一般是通过能耗制动电阻再转换为热能浪费掉了。 如果能够有一种装置,将这部分再生电能利用起来,那么不是可以省下这部分电能,起到节能降耗的效果吗?能量回馈装置就是这样一种技术。它使用的电力电子变换技术,其主要实现的作用就是将上述设备在运行过程中所产生的再生电能利用起来,并转换为所需的电能再利用,起到节电的效果。 二、能量回馈技术基本原理 该技术将运动中负载上的机械能(势能、动能)通过能量回馈装置变换成电能(再生电能)并回送给交流电网,供自身或其它用电设备使用,使电机拖动系统在单位时间消耗电网电能下降,从而达到节约电能的目的。能量回馈装置的作用就是能有效的将电动机的再生电能高效回送给交流电网,供周边用电设备使用,节电效果十分明显,一般节电率可达15%~45%。此外,由于无电阻发热元件,机房温度下降,可以节省机房空调的耗电量,在许多场合,节约空调耗电量往往带来更优的节电效果。但是,现行的国家电网不允许零星的再生电力回馈给公共电网,所以,现阶段的能源回馈装置产生的电能都是供给自身或周边的电器使用。 三、实践范例——电梯的能量回馈装置介绍 1、技术背景 随着现代化工业的高速发展,能源紧缺已成为日益突出的世界性问题。我国近年来电能供需矛盾也日益突出,节能已成为中国经济生活势在必行的选择。作
控制电机(2版)思考题与习题参考答案 (机械工业出版社,李光友等编着) 第1章直流伺服电动机 1.一台直流电动机,其额定电压为110V ,额定电枢电流为0.4A ,额定转速为3600r/min ,电枢电阻为50Ω,空载阻转矩015.0T 0=N ·m ,试问电动机的额定负载转矩是多少? 解:, =120, 2.093N ·m ,a 和电枢电阻a R 。 解:,,100 3.矩.0T 0=a R 。 解:100 , 4.75Ω。当发电机空载时,电动机电枢加110V 电压,电枢电流为0.12A ,机组的转速为4500r/min 。试求:(1)发电机空载时的输出电压为多少?(2)电动机仍加110V 电压,发电机负载电阻为1kΩ时,机组的转速为多少? 解:(1) (2)由得,,=0.12A,n=4500r/min. 接负载时,U=,
解得 =4207r/min 5.试用分析电枢控制时的类似方法,推导出电枢绕组加恒定电压,而励磁绕组加控制电压时直流伺服电动机的机械特性和调节特性。并说明这种控制方式有哪些缺点? 答:磁场控制时电枢电压保持不变。机械特性是指励磁电压不变时电动机转速随电磁转矩变化的关系,即 =。由公式可知,当控制电压加载励磁绕组上,即采用磁场控制时,随着控制信号减弱, 减小,k n与 6. 答:电枢控制时,若励磁电压下降,减小, 7. I 流 a 答:励磁电压不变,可近似认为不变。负载转矩减小时,由,8.? 答:直流伺服电动机的机械特性为当控制电压和励磁电压均不变时,都是常数,转速和电磁转矩之间是线性关系,且随着电磁转矩 放大器的内阻对机械特性来说,与电枢电阻是等价的,电阻越大,直线斜率 9.直流伺服电动机在不带负载时,其调节特性有无死区?调节特性死区的大小与哪些因素有关 答:有死区。,死区电压与起始负载转矩,电枢电阻,励磁电压,电机结构有关。 10.当直流伺服电机运行在电动机、发电机、反接制动、能耗制动四个状态时,电磁转矩与转速的方向成什么关系?它们的能量流向有什么特点? 答:电动机:电磁转矩与转速方向相同,电能转化为机械能。发电机:电磁转矩与转速方向相反,机械能转化为电能。反接制动:电磁转矩与转速方向相反,电能和转子机械能转化为电机内部的热能。能耗制动:电磁转矩与转速方向相反。转子机械能转化为电机内部的热能。 11.试述机电时间常数的物理意义。
能量回馈式可编程电子负载 概述 各种电源类产品:如稳 压电源、UPS、消防应急电 源、直流电源、充电器、发电 机等,出厂前均需要进行负载 老化与试验。传统的方法是采 用电阻进行能耗放电,这一方 面会消耗大量的电能,另一方 面会大大增加输配电设备的容 量,同时释放的热量会增加空 调的负担。 在电源老化、测试过程中 通常采用特定的非线性负载, 如三线制整流器、四线制整流 器等,同时其功率因数也有特 定要求。 在有源电力滤波器及无功 补偿设备的检验、测试、老化 过程中,不仅有上述要求,同 时还需可设定的三相有功不平衡、无功功率,谐波次数、幅值、相位可编程特性。 华天HTFPL系列能量回馈式可编程电子负载由负载模拟单元、能量回馈单元和可编程人机界面组成,可模拟多种类型的负载,具有精度高、编程灵活、安全可靠、高效节能、维护简单、扩容方便等优点。 系统构成 整机采用模组结构,采用交直交的背靠背双向可调逆变技术,由多个负载、回馈对并联构成,负载单元四线制接入电网、回馈单元三线制接入电网,二者的直流母线正负分别相连。 人机界面通过RS485总线集中监控管理负载单元、回馈单元,模拟小电流负载时,可运行一个负载回馈对,模拟大电流负载时,可运行多个负载回馈对。每个负载回馈对又可以单独调节输出电流的大小,以达到精确输出的要求。 常见的负载类型已经预存于每个负载单元的控制模块中,通过人机界面可以一键加载。人机界面具有编程功能,可以自定义任意电流波形,同时,预存了多种负载模版,编程既简单又快速。 负载阶跃时,由光纤信号同步各负载单元,同步特性好。
系统构成框图 工作原理 人机界面与负载单元的控制器通信,指定其加载某种预存的负载电流波形数据,或者下发编程的电流波形数据,控制器中的高速数字信号处理器(DSP)对数据进行处理,得到指令电流,并通过电流跟踪控制电路和驱动电路,以脉宽调制(PWM)信号形式向负载电流发生电路送出驱动脉冲,驱动IGBT或IPM功率模块,生成负载电流,实现各种负载类型的模拟。 每个“负载单元”可以编程输出各种负载波形,其输入的有功功率通过“回馈单元”实现平衡。由于“回馈单元”可以实现双向能量控制,因此“负载单元”通过编程可以模拟为阻性负载、容性负载、感性负载、整流器负载、电动机、发电机等各种类型的负载,也可以模拟以上几种类型负载的叠加。 工作原理框图
第三章直流电机 3-l.直流电机中为何要用电刷和换向器,它们有何作用? 答:在换向器的表面压着电刷,使旋转的电枢绕组与静止的外电路相通,其作用是将直流电动机输人的直流电流转换成电枢绕组内的交变电流,进而产生恒定方向的电磁转矩,或是将直流发电机电枢绕组中的交变电动势转换成输出的直流电压。 3-2.简述直流电动机的工作原理。 答:工作原理:当直流电动机电枢绕组接至电源上时,根据电磁力定律,载流导体在磁场中受电磁力的作用,产生了一个转矩,在转矩的作用下,电枢便按逆时针方向旋转起来。 3-3.直流电动机的励磁方式有哪几种?画出其电路。 按励磁方式分为有(1)他励;(2)并励;(3)串励;(4)复励等四种,如图3-7所示。 3-4.阐明直流电动机电磁转矩和电枢电动势公式T=C tφI a、E a=C eφn中各物理量的函义。 答:T=C tφI a 式中C T—与电动机结构有关的常数; φ一每极磁通(Wb) I a一电枢电流(A); T一电磁转矩(N·m)。 E a=C eφn 式中P一电动机轴上输出功率(kw);
n一电动机转速(r/min); T—电动机电磁转矩(N·m)。 3-5.直流电动机电枢电动势为何称为反电动势? 答:直流电动机电枢电动势的方向与电枢电流的方向相反,因而称为反电动势。3-6.试写出直流电动机的基本方程式,它们的物理意义各是什么? 答:U=E a+I a R a(3-4) 式中U—电枢电压(V) I a—电枢电流(A) R a—电枢电阻(Ω) 3-7.何为直流电动机的机械特性,写出他励直流电动机的机械特性方程式。答:直流电动机的机械特性:是在稳定运行情况下,电动机的转速与电磁转矩之间的关系,即n=f(T)。 机械特性方程式 3-8.何为直流电动机的固有机械特性与人为机械特性? 答:当他励直流电动机的电源电压、磁通为额定值,电枢回路未接附加电阻R pa 时的机械特性称为固有机械特性。 人为机械特性:人为地改变电动机气隙磁通φ、电源电压U和电枢回路串联电阻R pa等参数,获得的机械特性。 3-9.写出他励直流电动机各种人为机械特性方程式和人为机械特性曲线,并分析其特点。 答:1.电枢回路串接电阻R pa时的人为特性 人为机械特性方程为 2.改变电源电压时的人为机械特性 人为机械特性方程为 3.改变磁通时的人为机械特性 人为机械特性方程式为
南京工程学院 课程设计说明书(论文) 题目单相整流直流电机驱动和制动控制 课程名称电机拖动自动化控制 院(系、部、中心)电力工程学院 专业电气工程及其自动化 设计地点 8-319 指导教师李先允廖得利 设计起止时间:2010 年6 月13日7月至3日 目录
课程设计任务书 .................................................................................................................. - 3 - 第一章、引言 ...................................................................................................................... - 7 - 1、关于直流电机 .............................................................................................................. - 7 - 2、电机控制技术 .............................................................................................................. - 9 - 3、电机驱动 .................................................................................................................... - 10 - 4、电机制动 ...................................................................................................................... - 10 - 5、关于象限运行 ............................................................................................................ - 11 - 第二章、实习 .................................................................................................................... - 11 - 1、内容简介 ...................................................................................................................... - 11 - 1)、电路的描述 ........................................................................................................ - 11 - 2)、演示.......................................................................................................................- 11 - 3)、注意 .................................................................................................................... - 13 - 2、内部结构介绍 .............................................................................................................. - 13 - 1)、各模块简介 ........................................................................................................ - 13 - 2)、各模块具体构成 ................................................................................................ - 22 - 3)、波形分析 ............................................................................................................ - 26 - 第三章、补充相关知识 .................................................................................................... - 27 - 1、调速性能指标 ...................................................................................................... - 27 - 2、转速调节器的作用 .............................................................................................. - 27 - 3、电流调节器的作用 .............................................................................................. - 27 - 4、运动控制系统的转矩控制规律 .......................................................................... - 27 - 5、几种制动方法 ...................................................................................................... - 28 - 四、参考文献.................................................................................................................- 29 -
一、引言 从广义上讲,电机是电能的变换装置,包括旋转电机和静止电机。旋转电机是根据电磁感应原理实现电能与机械能之间相互转换的一种能量转换装置;静止电机是根据电磁感应定律和磁势平衡原理实现电压变化的一种电磁装置,也称其为变压器。 这里我们主要讨论旋转电机,旋转电机的种类很多,在现代工业领域中应用极其广泛,可以说,有电能应用的场合都会有旋转电机的身影。与内燃机和蒸汽机相比,旋转电机的运行效率要高的多;并且电能比其它能源传输更方便、费用更廉价,此外电能还具有清洁无污、容易控制等特点,所以在实际生活中和工程实践中,旋转电机的应用日益广泛。 不同的电机有不同的应用场合,随着电机制造技术的不断发展和对电机工作原理研究的不断深入,目前还出现了许多新型的电机,例如,美国EAD公司研制的无槽无刷直流电动机,日本SERVO公司研制的小功率混合式步进电机,我国自行研制适用于工业机床和电动自行车上的大力矩低转速电机等。 1 旋转电机分类 在旋转电机中,由于发电机是电能的生产机器,所以和电动机相比,它的种类要少的多;而电动机是工业中的应用机器,所以和发电机相比,人们对电动机的研究要多的多,对其分类也要详细的多。实际上,我们通常所说的旋转电机都是狭义的,也就是电动机——俗称“马达”。众所周知,电动机是传动以及控制系统中的重要组成部分,随着现代科学技术的发展,电动机在实际应用中的重点已经开始从过去简单的传动向复杂的控制转移;尤其是对电动机的速度、位置、转矩的精确控制。 由此可见,对于一个电气工程技术人员来说,熟悉各种电机的类型及其性能是很重要的一件事情。通常人们根据旋转电机的用途进行基本分类。下面我们就从控制电动机开始,逐步介绍电机中最有代表性、最常用、最基本的电动机——控制电动机和功率电动机以及信号电机。 2 控制电动机 2.1 伺服电动机 伺服电动机广泛应用于各种控制系统中,能将输入的电压信号转换为电机轴上的机械输出量,拖动被控制元件,从而达到控制目的。 伺服电动机有直流和交流之分;最早的伺服电动机是一般的直流电动机,在控制精度不高的情况下,才采用一般的直流电机做伺服电动机。目前的直流伺服电动机从结构上讲,就是小功率的直流电动机,其励磁多采用电枢控制和磁场控制,但通常采用电枢控制。 旋转电机的分类,直流伺服电动机在机械特性上能够很好的满足控制系统的要求,但是由于换向器的存在,存在许多的不足:换向器与电刷之间易产生火花,干扰驱动器工作,不能应用在有可燃气体的场合;电刷和换向器存在摩擦,会产生较大的死区;结构复杂,维护比较困难。 交流伺服电动机本质上是一种两相异步电动机,其控制方法主要有三种:幅值控制、相位控制和幅相控制。 一般地,伺服电动机要求电动机的转速要受所加电压信号的控制;转速能够随着所加电压信号的变化而连续变化;电动机的反映要快、体积要小、控制功率要小。伺服电动机主要应用在各种运动控制系统中,尤其是随动系统。 2.2 步进电动机 所谓步进电动机就是一种将电脉冲转化为角位移的执行机构;更通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。我们可以通过控制脉冲的个数来控制电机的角位移量,从而达到精确定位的目的;同时还可以通过控制脉冲频率来控制电动机转动的速度和加速度,从而达到调速的目的。目前,比较常用的步进电
直流电机速度控制(中英文对照) 调节系统 调节系统是一类通常能提供稳定输出功率的系统。 例如,电机速度调节器要能在负载转矩变化时仍能保持电机速度为恒定值。即使负载转矩为零,电机也必须提供足够的转矩来克服轴承的粘滞摩檫影响。其它类型的调节器也提供输出功率,温度调节器必须保持炉内的温度恒定,也就是说,即使炉内的热量散失也必须保持炉温不变。一个电压调节器必须也保持负载电流值变化时输出电压恒定。对于任何一个提供一个输出,例如速度、温度、电压等的系统,在稳态下必定存在一个误差信号。 电气制动 在许多速度揑制系统中,例如轧钢机,矿坑卷扬机等这些负载要求频繁地停顿和反向运动的系统。随着减速要求,速度减小的比率取决于存储的能量和所使用的制动系统。一个小型速度控制系统(例如所知的伺服积分器)可以釆取机械制动,但这对大型速度控制器并不可行,因为散热很难并且很昂贵。 可行的各种电气制动方法有: 1.回馈制动。 2.涡流制动。 3.能耗制动。 4.反向(接)制动。 回馈制动虽然并不一定是最经济的方式,但却是做好的方式。负载中存储的能量通过工作电机(暂时以发电机模式运行)被转化成电能并被返回到电源系统中。这样电源就充当了一个收容不想要的能量的角色。假如电源系统具有足够的容量,在短时回馈过程中最终引起的端电压升高会很少。在直流电机速度控制沃特-勒奧那多法中,回馈制动是固有的,但可控硅传动装置必须被排布的可以反馈。如果轴转速快于旋转磁场的速度,感应电机传动装置可以反馈。有晶闸管换流器而来的廉价变频电源的出现在变速装置感应电机应用中引起了巨大的变化。 涡流制动可用于任何机器,只要在轴上安装一个铜条或铝盘并在磁场中旋转它即可。在大型系统中,散热问题很重要的,因为如果长时间制动,轴、轴承和电机的温度就会升高。 在能耗制动中,存储的能量消粍在回路电阻器上。用在小型直流电机上时,电枢供电被断开,接入一个电阻器(通常是一个继电器、接触器或晶闸管)。保持磁场电压,施加制动降到最低速。感应电机要求稍微复杂一点的排布,定子绕组被从交流电源上断开,接到直流电源上。产生的电能继而消粍在转子回路中。能耗制动应用在许多大型交流升降系统中,制动的职责是反向和延长。 任何电机都可以通过突然反接电源以提供反向的旋转方向(反接制动)来停机。在可控情况下’这种制动方法对所有传统装置都是适用的。它主要的缺点就是当制动等于负载存储的能量时,电能被机器消耗了。这在大型装置中就大大增加了运行成本。 等脉宽PWM法 VVVF装置在早期是采用PAM控制技术来实现的,其逆变器部分只能输出频率可调的方波电压而不能调压。等脉宽PWM法正是为了克服PAM法的这个缺点发展而来的,是PWM法中最为简单的一种。它是把每一脉冲的宽度均相等的脉冲列作为PWM波,通过改变脉冲列的周期可以调频,改变脉冲的宽度或占空比可以调压,采用适当控制方法即可使电压与频率协调变化。相对于PAM法,该方法的优点是
《电机与电气控制技术》第2版习题解答 第三章直流电机 3-1直流电机中为何要用电刷与换向器,它们有何作用? 答:直流发电机与直流电动机的电刷就是直流电压、电流引出与引入的装置。在发电机中换向器就是将电枢元件中的交变电势度换为电刷向直流电势;在电动机中换向器使外加直流电流变为电枢元件中的交流电流,产生恒定方向的转矩,使电枢旋转。 3-4阐明直流电动机电磁转矩与电枢电动势公式T=C tφI a1,E a=C eφn中各物理量的涵义。 答:直流电动机电磁转矩T=C TφI a 式中C T:与电动机结构有关的常数,称转矩系数; φ:每极磁通; I a:电枢电流、 T:电磁转矩。 直流电动机电枢电动势公式E a=C eφn 式中:C e:与电动机结构有关的另一常数,称电动势系数; φ:每极磁通; n:电动机转速; E a:电枢电动势。 3-5直流电动机电枢电动势为何称为反电动势? 答:直流电动机电枢转动时,电枢绕组导体切割磁力线,产生感应电动势,由于该电动势方向与电枢电流的方向相反,故称为反电动势。 3-6试写出直流电动机的基本方程式,它们的物理意义各就是什么? 答:直流电动机的基本方程式有电动势平衡方程式、功率平衡方程式与转矩平衡方程式。 1)电动势平衡方程式:U=E a+I a R a 式中U:电枢电压; E a:电枢电动势; I a:电枢电流; R a:电枢回路中内电阻。 2)功率平衡方程式: 电动机的输入电功率P1=P em+P cua 式中P em:电磁功率 P cua:电枢绕组的铜损 电动机输出的机械功率:P2=P em-P Fe-P m=P1-P cua-P Fe-P m 式中P Fe:电枢铁心损耗; P m:机械损耗; P1:电动机输入的电功率。 3)转矩平衡方程式:T2=T-T0 式中T2:电动机轴上输出的机械转矩; T:电动机电磁转矩; T0:空载转矩。 3、7、何谓直流电动机的机械特性,写出她励直流电动机的机械特性方程式。 答:直流电动机的机械特性就是在稳定运行情况下,电动机的转速n与机械负载转矩T L之间的关系,即n=f(T L)。机械特性表明电动机转速因外部负载变化而变化的情况,由于电动机电磁转矩T近似