传感器的动态特性与静态特性_第二章讲解
- 格式:ppt
- 大小:1.29 MB
- 文档页数:64

第二章 传感器的特性 测量系统的特性跟传感器的特性几乎一样,因为传感器和测量系统都是用来对输入信号进行测量的,传感器可以看作是测量系统的一个部件,而传感器本身也可以看作是一个系统,因为一个完整的传感器也是多个部件组成的。 传感器特性主要是指输入与输出之间的关系。研究传感器的特性,以便用理论指导其设计、制造、校准和使用。 当输入量为常量,或变化极慢时,这一关系称为静态特性; 当输入量随时间较快地变化时,这一关系称为动态特性。 传感器输出与输入关系可用微分方程来描述。理论上,将微分方程中的一阶及以上的微分项取为零时,即得到静态特性。因此,传感器的静态特性只是动态特性的一个特例。 实际上传感器的静态特性要包括非线性和随机性等因素,如果把这些因素都引入微分方程,将使问题复杂化。为避免这种情况,总是把静态特性和动态特性分开考虑。 传感器除了描述输入输出关系的特性之外,还有与使用条件、使用环境、使用要求等有关的特性。 传感器的输入与输出具有的确定对应关系最好呈线性关系。但一般情况下,输入输出不会符合所要求的线性关系,同时于存在迟滞、蠕变、摩擦、间隙和松动等各种因素以及外界条件的影响,使输入输出对应关系的唯一确定性也不能实现。 第一节 传感器的静态特性 传感器的静态特性表示输入量x不随时间变化,输出量y与输入量x之间的函数关系。通常表示为 式中:ai——传感器的标定系数,反映了传感器静态特性曲线的形态。 上述静态模型有三种特殊形式: 线性特性。线性传感器有另种情况: ①若 ,特性曲线是一条不过零的直线。 ②若 ,特性曲线是一条过零的直线,这是理想的传感器应具有的特性,只有具备这样的特性才能正确无误地反映被测量的真值。 仅有偶次非线性项。因为它没有对称性,所以线性范围较窄。 仅有奇次非线性项。具有这样特性的传感器一般输入量x在相当大的范围内具有较宽的准线性,这是较接近理想线性的非线性特性。它相对坐标原点是对称的,即 所以它具有相当宽的近似线性范围。 1.测量范围和量程 传感器所能测量到的最小被测量 与最大被测量 之间的范围称为传感器的测量范围,表示为。传感器测量范围的上限值与下限值之差 - 称为量程。 例如,某温度传感器的测量范围是-30~ +120℃,那么该传感器的量程为150℃。 在实际应用中,传感器的量程选择是一个简单却需要特别注意的问题。一般的传感器产品所给出的精度都是针对满量程的相对值,如%FS,因此实际使用时越接近满量程,其测量准确度越高。 2.线性度 理想的传感器静态特性曲线是一条直线。而实际传感器的输入输出关系或多或少地存在非线 性。因此传感器实际的静态特性校准曲线与某一参考直线不吻合程度的最大值称为线性度。在不考虑迟滞、蠕变、不稳定性等因素的情况下,其静态特性可用下列多项式代数方程表示: 式中:y—输出量; x—输入量; a0—零点输出; a1—理论灵敏度;a2、a3、 、 an—非线性项系数。 各项系数不同,决定了特性曲线的具体形式。 静态特性曲线可实际测试获得。在获得特性曲线之后,可以说问题已经得到解决。但是为了
第二章传感器的基本特性主要内容:2.1 传感器静态特性2.2传感器动态特性要点:静态特性;线形度、迟滞、重复性、灵敏度、稳定性动态特性;数学模型、过度函数、频率特性、幅频特性概述传感器一般要变换各种信息量为电量,描述这种变换的输入与输出关系表达了传感器的基本特性。
对不同的输入信号,输出特性是不同的,对快变信号与慢变信号,由于受传感器内部储能元件(电感、电容、质量块、弹簧等)的影响,反应大不相同。
快变信号要考虑输出的动态特性,即随时间变化的特性;慢变信号要研究静态特性,即不随时间变化的特性。
例:放射性仪器不同性能的探测器测量性能差别传感器的各种性能由传感器输入与输出之间的关系来描述,视传感器为具有输入输出的二端网络。
* 当输入量(X)为静态(常量)或变化缓慢的信号时(如温度、压力),讨论传感器的静态特性,输入输出关系称静态特性。
* 当输入量(X)随时间变化时(如加速度、振动),讨论传感器的动态特性,输入输出关系称动态特性。
2.1传感器静态特性2.1.1线性度传感器输入输出关系可以用多项式表示:其中:X:输入量;Y:输出量;a0:x = 0时的输出(y)值;a1:理想灵敏度;a2, a3,……an:为非线性项系数一个理想的传感器我们希望它们具有线性的输入输出关系,由于实际传感器输入总有非线性(高次项)存在,X-Y总是非线性关系。
在小范围内用割线、切线近似代表实际曲线使输入输出线性化。
近似后的直线与实际曲线之间存在的最大偏差称传感器的非线性误差——线性度,通常用相对误差表示:式中:ΔLmax为最大非线行绝对误差 YFS 为满量程输出γL为线性度提出线性度的非线性误差,必须说明所依据的基准直线,按照依据基准直线不同有不同的线性度:理论线性度,端基线性度,独立线性度。
最小二乘法线性度设拟合直线方程 :………①取n个测点,第i个测点与直线间残差为:……… ②根据最小二乘法原理取所有测点的残差平方和为最小值:求解k、b代入方程①作拟合直线,实际曲线与拟合直线的最大残差Δimax为非线性误差,最小二乘法求取的拟合直线拟合精度最高,也是最常用的方法。
第二章 传感器基础§2-1 传感器的静态特性医用传感器的输入量可以分为静态量与动态量两大类。
静态量:是指固定状态的信号或变化极其缓慢的信号(准静态量)。
动态量:通常是指周期信号、瞬变信号或随机信号。
无论对动态量或静态量,传感器输出量都应不失真地复现输入生理量的变化,其关健决定于传感器的静态特性与动态特性。
一.传感器的静态特性传感器的静特性—表示传感器在被测量处于稳定状态,输入量为恒定值而不随时间变化时,其相应输出量亦不随时间变化,这时输出量与输入量之间的关系称为静态特性。
这种关系一般根据物理、化学、生物学的“效应”和“反应定律”得到,具有各种函数关系。
传感器的输出输入关系或多或少的存在非线性问题。
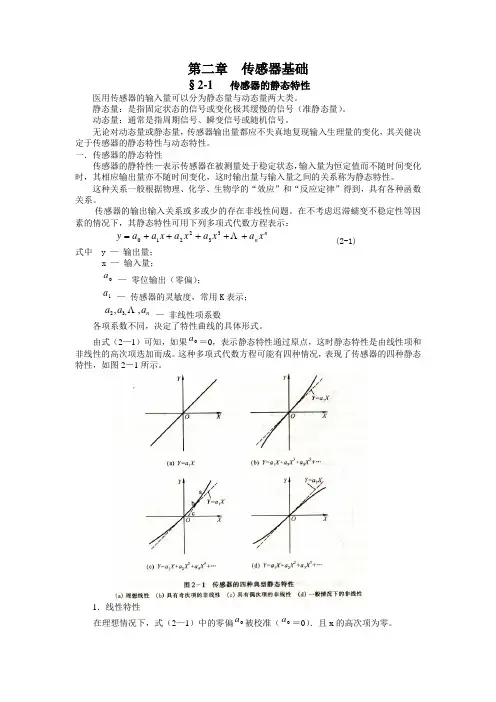
在不考虑迟滞蠕变不稳定性等因素的情况下,其静态特性可用下列多项式代数方程表示:n n x a x a x a x a a y +++++= 332210 (2-1)式中 y — 输出量;x — 输入量;0a — 零位输出(零偏);1a — 传感器的灵敏度,常用K 表示;n a a a ,,,32 — 非线性项系数各项系数不同,决定了特性曲线的具体形式。
由式(2—1)可知,如果0a =0,表示静态特性通过原点,这时静态特性是由线性项和非线性的高次项迭加而成。
这种多项式代数方程可能有四种情况,表现了传感器的四种静态特性,如图2-1所示。
1.线性特性在理想情况下,式(2—1)中的零偏0a 被校准(0a =0).且x 的高次项为零。
0,,,32=n a a a 线性方程为: x a y 1= 如图2—1(a )所示。
此时, K x y a ==/1 K 称为传感器的灵敏度。
2.非线性项仅有奇次项的特性当式(2—1)中只有x 的奇次项,即: +++=55331x a x a x a y 时2—1(b )所示。
在这种情况下,在原点附近相当范围内输出、输入特性基本成线性,对应的曲线有如下特性:y (x )=-y(-x ) 3.非线性项仅有偶次项的特性当式(2—1)中只有x 的偶次非线性项时.所得曲线不对称,如图2-1(c )所示。