基于慧鱼模型的水上垃圾收集器设计
- 格式:docx
- 大小:152.96 KB
- 文档页数:47
一种新型智能海洋塑料垃圾收集装置作品内容简介这是一种新型智能化海洋塑料废弃物收集装置,它结合了传感器技术与自动控制原理,并引入现代无线通信技术与物联网技术,真正做到高效率,高智能化地收集处理海洋废弃物,对海洋生态环境的恢复具有积极的作用,符合当今时代性可持续发展的科学发展观。
1.研制背景及意义长时间以来,人们一向聚焦于陆地上土壤环境中的塑料污染,而对地球的另一组成部分——海洋中的塑料污染问题却很少重视。
事实上,海洋塑料废物污染以及它们关于海洋生态环境构成的损害现已远远超出了人们的幻想。
为了治理海洋生态环境,人们已经开始做出努力,但由于海洋中的塑料废弃物数量众多且分布广阔,仅凭现有条件下的人力和简单机械无法达到预期的处理目的。
本文设计的新型智能海洋塑料垃圾收集装置可以很好地解决或改善海洋塑料废弃物污染问题,其利用先进的现代化技术谋求海洋资源的可持续发展和利用。
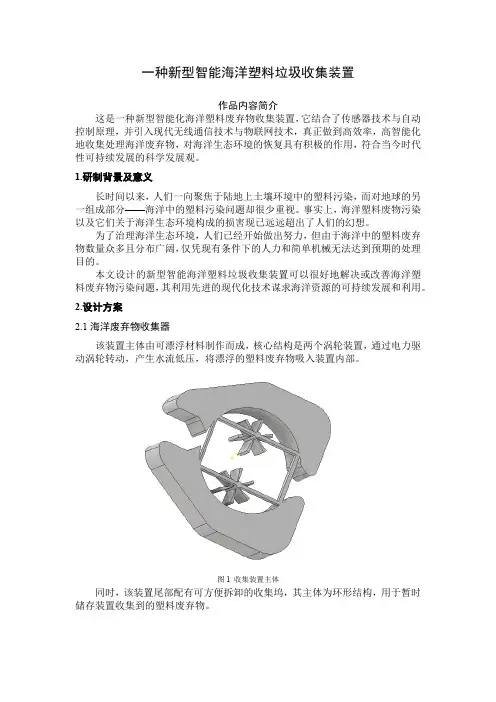
2.设计方案2.1海洋废弃物收集器该装置主体由可漂浮材料制作而成,核心结构是两个涡轮装置,通过电力驱动涡轮转动,产生水流低压,将漂浮的塑料废弃物吸入装置内部。
图1 收集装置主体同时,该装置尾部配有可方便拆卸的收集坞,其主体为环形结构,用于暂时储存装置收集到的塑料废弃物。
图2 收集坞整个收集装置亦由涡轮驱动前进,同时还配有辅助动力(图中未画出),并可通过两侧涡轮的转速不同来控制移动方向。
将该装置放置于海洋中,所到之处漂浮着的塑料废弃物都会被收集起来。
2.2收集装置的反馈控制如果任由收集装置在海洋中游荡,将不会达到最佳的收集效果。
因此本海洋废弃物收集装置设有自动控制模块,其原理的通过设置在收集口的传感器来实时检测当前正在被收集的塑料废弃物流的密度。
图3 红外传感器传感器发射一簇红外线,通过反射膜反射回来并由传感器接收,如果有废弃物遮挡,信号便有所损耗,由此可以实时监测塑料废弃物的流密度。
通过对废弃物流密度的分析,收集装置通过改变行进的速度和方向来智能地寻找塑料废弃物并收集。
自动化垃圾收集船的设计与应用自动化垃圾收集船是一种新型的环保设备,它能够自动收集各种垃圾,包括塑料、玻璃、金属等,有效减少了人工收集垃圾的工作量,提高了垃圾处理的效率,保护了环境,改善了人们的生活质量。
本篇文章将介绍自动化垃圾收集船的设计与应用。
设计自动化垃圾收集船一般由船体、垃圾收集设备、垃圾分类设备和动力系统等部分组成。
船体一般采用钢铁或者铝合金等材料,具有良好的耐腐蚀性和抗压性,能够在水中稳定运行。
垃圾收集设备通常采用机械臂或者输送带等装置,能够自动将垃圾投放到垃圾舱中。
垃圾分类设备一般采用传感器和机械控制系统,能够对垃圾进行分类,提高了垃圾的再利用率。
动力系统一般采用发动机或者电动机,能够提供足够的动力,保证船只正常运行。
应用自动化垃圾收集船在城市垃圾处理中有着广泛的应用。
它可以在河道、湖泊等水域收集漂浮的垃圾,保护水源,改善水环境。
它还可以在海洋中收集漂浮的塑料垃圾,减少海洋污染。
它还能在城市的河道旁收集垃圾,保持河道的干净整洁。
自动化垃圾收集船还可以在港口、码头等地方收集船只周围的垃圾,保持港口的整洁。
自动化垃圾收集船在城市垃圾处理中有着广泛的应用,能够有效改善城市环境。
自动化垃圾收集船的优势相比传统的垃圾收集方式,自动化垃圾收集船有着明显的优势。
它能够减少人工收集垃圾的工作量,提高了垃圾处理的效率,降低了城市垃圾处理的成本。
它能够对垃圾进行分类,提高了垃圾的再利用率,有利于资源的循环利用。
它能够减少垃圾对环境造成的污染,保护了自然环境,改善了人们的生活质量。
自动化垃圾收集船有着明显的优势,是一种值得推广的环保设备。
水面垃圾自主收集桶设计摘要:针对水面漂浮垃圾日益泛滥、收集成本高、难度大的问题,本团队设计了一种收集效率高、适应性强的拨爪式水面垃圾自主收集桶。
该收集桶主要由摆动拨爪装置、浮力调控舱、快换网袋、排水导流装置、水下推进器及信息采集与控制系统组成。
摆动拨爪装置中的曲柄摇杆机构通过理论计算最终设计得出,高效工作的同时也可扩大垃圾收集范围;借助排水导流装置形成特定水流,带动漂浮物流入快换网袋;浮力调控舱通过改变排水体积调节浮力,保证收集桶在工作时维持适宜吃水深度。
对于装置整体,通过平衡理论分析,保证其在稳定平衡的工作状态下实现自主巡航、快速收集等要求。
关键词:水面漂浮垃圾;拨爪式;自主收集1引言近几年,我国的机械化和智能化在各行各业得到了不断推进,水环境治理方案不断完善,技术也在不断发展,出现了各式各样的针对鱼池、人工湿地、湖泊有一定的清理能力的水面垃圾清理装置。
但值得一提的是,这些装置使用条件苛刻,清理能力有限,且绝大多数装置的机械化和智能化发展极不均衡,水面垃圾的处理技术更是极不成熟。
针对以上所述问题,急需设计一款集机械化与自动化于一体的水面垃圾清理装置来保证海面垃圾的清理力度,提高垃圾收集效率,改善水域环境,促进人与自然的和谐稳定。
2工作原理水面垃圾自主收集桶设有遥控模式和超声波自主巡航模式。
工作流程如图1所示,遥控模式下使用者通过手机端控制收集桶进行半自动收集;自主巡航模式只需在手机端或机身触控面板设定收集桶的巡航范围,出航时间,随后控制系统自动规划巡航路径后即可进行自主收集,摄像头在云台的带动下可对前方120°范围的水域进行检测,精准识别垃圾,排水导流装置不断将垃圾存储仓中的水排出,桶内形成稳定负压,在负压作用下吸入周围的水体,带动垃圾流入垃圾存储仓;摆动拨爪装置通过曲柄摇杆机构将装置周围的垃圾拨入负压作用范围,扩大垃圾清理面积。
目标垃圾收集完成后,收集桶返回到预设航线上,继续自动巡航、遍历作业,待垃圾存储仓装满垃圾后自动返航,实现高效率无人化垃圾收集。
半自动渗透式水上垃圾收集系统设计
水上垃圾是指在江河湖海等水域中产生的各种废物,包括塑料袋、瓶子、饮料罐等。
由于其难以清理,导致环境严重污染,影响渔民生产和游客体验。
因此,设计一种可行的水上垃圾收集系统势在必行。
本文提出了半自动渗透式水上垃圾收集系统的设计方案。
该方案采用了渗透式收集和半自动化运维,可以有效地减少对水环境的污染,提高环境质量,同时降低运营成本和人力投入。
设计方案如下:
一、渗透式收集
传统的水上垃圾收集方式是利用船只巡逻,在水中捞取垃圾。
这种方式效率低下且成本高。
因此,本设计采用了渗透式收集方式,即将垃圾采用特殊材料固定在水面上,使其随波逐流,并最终被送到收集设施中。
这种方式不仅减少了对环境的干扰,还能够有效地筛选垃圾,提高收集效率。
二、半自动化运维
本设计方案使用半自动化运维方式,将垃圾处理设备自动化和人工运维相结合,减少了人工投入和工作强度,有效地降低了运营成本。
三、集中处理
本方案将垃圾收集点设在水域的合适位置,并设置一定的收集容量,以确保垃圾处理设备充分利用,并使垃圾分类工作得以顺利进行。
此外,设备还配备了浮动传感器和自动控制系统,可以自动检测和处理垃圾。
四、科技创新
本设计方案采用最先进的技术,包括无人机值守巡逻、无人船收集与传输、智能控制系统等,实现高效、智能、自动的垃圾处理。
总之,本设计方案采用了渗透式收集和半自动化运维的方式,并引入了最先进的科技创新,旨在提高收集效率和处理速度,降低成本,实现环境保护和水域净化的目标。

水上垃圾清理装置1 论文摘要1.1中文摘要摘要随着我国现代化进程的加快、垃圾产生量的增加,水上漂浮垃圾的数量也日益增多,而现有人工清理方式不仅效率低下,而且带有一定的危险性。
鉴于此,我们设计了这个水上垃圾清理装臵,以实现对漂浮垃圾环保、高效的收集。
【关键词】垃圾收集清理环保节能目录1 论文摘要 (1)1.1 中文摘要 (1)1 引语 (1)2 作品简介 (1)3 作品分类 (1)4 设计目的 (1)5 设计基本思路 (1)6 作品原理简介 (1)7 作品模型图片及照片 (1)8 使用说明 (3)9 作品主要创新点 (3)10 作品可行性 (4)11 技术特点优势分析 (4)12 适应范围 (5)13 市场分析 (5)14 经济效益预测 (5)15 推广价值 (5)16 结束语 (7)1 引语自古中华民族就以秀丽的山河文明于世,而在改革开放三十多年之后,我们要以更加美好的景色欢迎世界各地的友人。
但随着现代化的加快,我们看到的却已不是美丽的山河,而是工业文明所导致的环境污染,以及由此所引发的种种疾病,灾难。
有鉴于此,我们设计了这个水上垃圾清理装臵,希望以此为祖国环境保护尽自己的绵薄之力。
2作品简介本作品利用船只自身行进过程与水面的相对运动,带动垃圾收集器工作,达到收集清理水面漂浮垃圾的目的。
广泛适用于河面,湖面,海面等垃圾比较多的区域。
具有环保、无污染、收集效率高、操作简单、成本低廉等特点。
3作品分类机械控制与能源化工类4设计目的本作品是专为清理河流湖泊及海面上的漂浮垃圾而设计的。
机械化的设计不仅无需外加动力,美观的外形也成为水上一道靓丽的风景线,亦可起到宣传环保意识的作用。
5设计基本思路河流湖泊漂浮垃圾多,人工清理费时费力。
本作品主要利用船只作为收集清理载体,配合本作品加以简单改装,即可实现利用船只的闲余能源清理漂浮垃圾的目的。
6作品原理简介船只前进过程中,水流的冲击力使位于船只后方的叶轮转动,叶轮带动传送带的转动。
半自动渗透式水上垃圾收集系统设计随着水污染问题的日益严重,水上垃圾收集成为一项紧迫的任务。
为了解决这一问题,设计了一种半自动渗透式水上垃圾收集系统。
该系统主要由水上垃圾收集器、渗透装置、垃圾处理装置和控制系统组成。
水上垃圾收集器是系统的核心设备,它可以自动收集水面上的垃圾。
该收集器采用锚固方式固定在水面上,通过一根柔性绳索与渗透装置相连。
当垃圾收集器收集到一定程度时,会发出信号通知渗透装置运行。
渗透装置位于水下,主要是利用水力驱动垃圾收集器的升降。
当收集器发出信号后,渗透装置会启动并逐渐升高,然后将垃圾收集器中的垃圾推入垃圾收集管道中。
渗透装置升高的速度是可调节的,可以根据收集垃圾的情况进行调整。
垃圾收集管道将垃圾从渗透装置输送到垃圾处理装置。
该管道由特殊材料制成,具有良好的密封性和耐压能力。
垃圾处理装置可以将垃圾进行分类、压实和处理。
通过分类可以将可回收物和有害物质分离出来,压实可以减少垃圾的体积,处理可以转化垃圾为资源。
垃圾处理装置还具有自动清洗功能,可以定期清洗管道以保证其畅通。
控制系统是整个系统的大脑,通过控制信号和传感器来实现对系统的监控和控制。
控制系统可以实时监测垃圾收集器和渗透装置的运行状态,对系统进行故障诊断和报警。
控制系统还可以根据垃圾收集的情况和垃圾处理装置的状态,调节渗透装置的升高速度和垃圾处理装置的处理方式。
通过半自动渗透式水上垃圾收集系统的设计,可以有效地解决水上垃圾收集的问题。
该系统具有操作简单、高效、可持续的特点,可以减少人力成本和环境污染,为水质的净化和生态环境的保护做出贡献。
机械与动力工程河南科技Henan Science and Technology总第817期第23期2023年12月收稿日期:2023-05-26基金项目:2022年福建省本科高校教育教学研究重大项目(FBJG20220051);武夷学院教育教学改革研究项目(TSB202245SC );国家级大学生创新训练项目(202310397024)。
作者简介:杜加福(1999—),男,本科生,研究方向:机械设计制造。
通信作者:林权(1980—),男,硕士,副教授,研究方向:机械设计制造。
一种船式垃圾收集装置设计杜加福苏光富何晨旭庄忠猛何德强林权(武夷学院,福建武夷山354300)摘要:【目的】针对传统人工打捞和机动船只打捞水面垃圾漂浮物存在效率低、成本高、作业范围有限的问题,研发设计出一种船式垃圾收集装置。
【方法】该装置动力部分采用水下电机驱动螺旋桨来实现三自由度运动,传动部分采用链式传动与带式传动互补结合,依靠输送带完成垃圾输送,收集部分采用超声波测距控制结合曲柄摇杆机构来完成垃圾收集清洁工作,并通过太阳能追光模块,为装置实时供能。
【结果】经实践检验,该装置成功解决了水环境传统治理方式的缺点,并具有智能化、便捷性、多功能性等特点。
【结论】该装置的应用,不仅节约了人力和物力,还提高了工作效率,拓宽了工作范围,为投入实际生产研发奠定坚实基础。
关键词:垃圾收集;水面漂浮物;便携式;多功能;智能遥控;节能中图分类号:TH122文献标志码:A文章编号:1003-5168(2023)23-0047-04DOI :10.19968/ki.hnkj.1003-5168.2023.23.010Design of a Shiplike Garbage Collection DeviceDU Jiafu SU GuangfuHE Chenxu ZHUANG Zhongmeng HE Deqiang LIN Quan(Wuyi University,Wuyishan 354300,China)Abstract:[Purposes ]Aiming at the problems of low efficiency,high cost and limited operation scope oftraditional manual salvage and motor boat salvage of surface garbage floats,a shiplike garbage collection device was designed.[Methods ]The power part of the device uses underwater motor to drive the propel⁃ler to achieve three degrees of freedom movement,the transmission part uses chain transmission com⁃bined with belt transmission complementary combination,relying on the conveyor belt to complete the garbage transportation;the collection part uses ultrasonic distance control combined with a crank rockermechanism,to complete the garbage collection and cleaning work,and through the solar light trackingmodule,real-time energy supply for the device.[Findings ]Through practice test,the device has success⁃fully solved the shortcomings of the traditional water environment management mode,and has the charac⁃teristics of intelligence,convenience,multi-functionality.[Conclusions ]The device not only saves man⁃power and material resources,but also improves the work efficiency,broadens the scope of work,laying a solid foundation for the actual production,research and development.Keywords:garbage collection;water floater;portable;multifunctional;intelligent remote control;energysaving 0引言近年来,城市公园水域、乡镇池塘、湖泊、水产养殖场等小型水域的垃圾污染日趋严重,许多景区的人工湖泊、河流、湖海及邻边水域受到矿泉水瓶、枯树叶、塑料袋等水面漂浮垃圾的影响,对水质造成严重破坏,甚至破坏生态平衡,给人民的日常生活带来很大隐患[1-3]。
基于视觉识别的水面垃圾清理装置设计
沈李祥;王玉勤;胡毅;周生;曹振虎
【期刊名称】《河南科技》
【年(卷),期】2024(51)4
【摘要】【目的】为了快速清理水面垃圾,改善水面环境,设计了一种水面垃圾清理装置。
【方法】在分析清理装置工作原理的基础上,建立装置三维结构模型,并对主要部件进行结构设计。
所设计的视觉识别系统可以实时监测水面垃圾分布情况,从而快速清理水面垃圾。
装置上安装的太阳能板,可以为设备提供额外的动能。
为了验证所设计清洁装置的传送带滚轮是否满足强度要求,利用SolidWorks软件对滚轮进行有限元分析。
【结果】计算结果显示,所设计的滚轮结构设计合理,强度满足使用要求。
【结论】所设计的清洁装置在自动化、精准定位、实时监控和节能环保等方面具有显著的创新性和应用潜力,这为今后智能清理装置的研发和设计提供了借鉴。
【总页数】5页(P45-49)
【作者】沈李祥;王玉勤;胡毅;周生;曹振虎
【作者单位】巢湖学院机械工程学院
【正文语种】中文
【中图分类】TH137.5
【相关文献】
1.基于Python视觉识别的双模双动力水面垃圾清理船
2.基于GE·WDR技术的水面垃圾清理装置设计
3.基于视觉识别的水面垃圾处理装置
4.基于机器视觉的水面垃圾清理装置
5.基于仿生学的水面垃圾清理装置外观设计
因版权原因,仅展示原文概要,查看原文内容请购买。
华北水利水电大学大学生创新训练项目研究报告项目名称:水面垃圾智能联合收集装置项目负责人:沈杰项目所属学院:机械学院指导教师:一、研究目标传统的清洁方式是人工打捞清理,这种方式效率低且劳动强度大,适用于各种水域范围。
随着科技的进步与社会的发展,人工打捞清理的效率低下和劳动强度大的缺点越来越突出了,随后出些了自动垃圾打捞船。
自动打捞船对漂浮废物可自动打捞,也就是在船只航行的过程中依托水流的力气将打捞的树枝、水生植物、塑料袋等漂浮废物送入船舱内,可快速的大量清理废物,缩短保洁时刻。
比起人工打捞有显着的优势,节省人力,降低劳动强度。
但是为了保证清洁效率这些船设计的都很大,适用于大中型水域环境,无法使用于人们日常生活总经常接触到的小型水域环境。
我们的项目为解决目前城市河道及风景区水域及小流域水面垃圾收集的问题,本项目拟设计一款小型全自动的水面垃圾收集装置,采用视觉传输技术,自动控制技术,特殊的结构方案等,将垃圾识别,收集,实现垃圾打捞的智能化、一体化、高效化,从而真正实现智能化作业。
二、研究过程本次设计想要设计出一套水面垃圾自动清洁船控制系统,最终欲实现的主要任务目标有:(1)小船的基本航行功能,包括前进、后退、停止、加减速等;(2)识别水面垃圾并能进行回收。
整个系统设计由船体及推进装置、主控制芯片、电机和电机驱动电路、供电电源以及图像识别传感器等构成。
1.船体及推进装置船体的构造与设计直接决定小船能否安全运行以及运行是否顺畅,推进装置的选择与设计将影响小船的运行效率以及安全性、稳定性等。
为了保证小船能够安全、稳定、高效地在水面行驶,我们必须对智能小船的外型构造以及推动装置进行合理的选择与设计,保证各个组成部分能够相互配合。
船体应按空间大小,运行稳定,坚固性等要求来设计,我们使用过纯3D打印船体(重量小),雪弗板拼装船体(空间大,重量大),DIY塑料船体(重量小,使用方便)。
2.主要控制系统主控系统是实现智能船无线控制的中枢,主控系统的工作正常与否直接关系到整个系统的运行状况。
半自动渗透式水上垃圾收集系统设计随着城市化进程的加速,城市水域中的垃圾问题越来越严重,特别是在一些海滨城市和河流沿岸地区,水域垃圾的堆积已经成为了一个严重的环境问题。
针对这一问题,人们提出了各种各样的解决方案,其中包括设计一种半自动渗透式水上垃圾收集系统,以便更有效地清理城市水域中的垃圾。
本文将为大家介绍关于这种垃圾收集系统的设计方案,并探讨其工作原理及效果。
设计方案半自动渗透式水上垃圾收集系统是一种利用水力和机械系统收集水域垃圾的装置。
其基本组成部分包括浮标、主体结构、垃圾收集装置和垃圾处理装置等。
系统的浮标部分可以使整个装置浮在水面,且能够根据水位的变化而升降,以适应水深不同的水域环境。
主体结构部分是整个系统的支撑结构,起到承受设备重量和固定设备位置的作用。
垃圾收集装置是系统的核心组成部分,通常由网状结构和输送装置组成。
这部分的作用是将水中的垃圾拦截并输送到垃圾处理装置进行处理。
垃圾处理装置是对收集到的垃圾进行分类、压缩和包装的地方,以便后续的处理和清运。
效果半自动渗透式水上垃圾收集系统的设计方案具有许多优点,相对于传统的垃圾清理方式,它可以更加高效地清理水域中的垃圾。
整个系统不需要大量的人力投入,在水域中可以长时间连续工作,有效地减轻了人力成本。
系统设计合理,能够根据水位的变化而升降,适应不同水深的水域环境。
系统收集到的垃圾经过处理后,可以减少空间占用,并且有利于环保和资源回收利用。
半自动渗透式水上垃圾收集系统的设计方案是一种环保、高效的水域垃圾处理方式,对于改善城市水域环境,净化城市水域,具有积极的意义。
半自动渗透式水上垃圾收集系统的设计方案,通过合理的结构设计和科学的工作原理,能够高效地清理城市水域中的垃圾,为改善城市水域环境,净化城市水域,起到了重要的作用。
希望这一设计方案能够得到更多人的关注和支持,为城市水域的环境改善做出更大的贡献。
水面垃圾清理收集方案
近年来,水面垃圾成为了一个严重的环境问题。
为了解决这一问题,我们需要制定一套有效的水面垃圾清理收集方案。
以下是一些可能的解决方案:
1.建立垃圾收集船队:形成一支专门的垃圾收集船队,由合适的船只和设备组成,定期在水面上收集垃圾。
这些船只可以配备垃圾收集器和过滤装置,以有效清理水面上的各类垃圾。
2.推行垃圾分类:加强对水面垃圾的分类教育,鼓励居民在日常生活中进行垃圾分类。
通过正确分类垃圾,可以减少垃圾投放到水面上的数量,从而减少水面垃圾的产生。
3.加强监管和执法力度:完善相关的法律法规,加强对水面垃圾的监管和执法力度。
严惩违法行为,对投放垃圾到水面上的个人和单位进行罚款,并公开曝光,以起到警示作用。
4.开展环境清理活动:定期组织水面环境清理活动,邀请志愿者参与。
通过这些活动,可以清理水面上的垃圾,并增强公众对环境保护的意识。
5.推广循环经济模式:推广循环经济模式,鼓励回收利用水面垃圾中的可回收物品。
这样不仅可以减少垃圾对环境的污染,还可以创造经济价值。
综上所述,解决水面垃圾问题需要多方合作。
通过建立垃圾收集船队、推行垃圾分类、加强监管和执法力度、开展环境清理
活动和推广循环经济模式等措施,相信可以取得明显的成效,保护水体的环境质量,造福社会大众。
毕 业 设 计(论 文) 基于慧鱼模型的水上垃圾收集器设计 专业年级 机械工程及自动化 2008级 学号姓名 指导教师 评 阅 人 二○一二年六月 中国 常州河海大学 本科毕业设计(论文)任务书 (理工科类) Ⅰ、毕业设计(论文)题目: 基于慧鱼组合模型的水上垃圾收集器设计 Ⅱ、毕业设计(论文)工作内容 (从综合运用知识、研究方案的设计、研究方法和手段的运用、应用文献资料、数据分析处理、图纸质量、技术或观点创新等方面详细说明):
一、翻译英文资料; 二、水上垃圾收集器在水上能更加方便地收集各种垃圾,清理河道水面。通过机器前部分的叶片装置,再加上机械手臂的水面辅助功用,可以大大的加强机械水上收集垃圾的效率,进行更加方便快捷地处理水上垃圾。这个装置在设计中设计为可拆装组件,在考虑机械手臂的同时,在手臂的中间部分采用网状设计,可以减少水的阻力,也可以收集垃圾,使之更为方便和快捷。叶片的功能,在装置的前部分以叶片为主要部件。装置主要通过叶片的旋转来实现其主要功能——收集垃圾。除此外,叶片收集垃圾的可以达到不间断性,提高收集垃圾的效率。 最终要求实物与设计方案一致,搭接实物模型应能够实现论文中所涉及到的相关功能,实物应以慧鱼基本构件为基础辅以其他相关零配件。
三、每周汇报进度; 四、毕业论文的撰写、修改、打印; 五、参加毕业设计论文答辩。 Ⅲ、进度安排: 1—2 周 相关资料收集,拟定初始搭接方案 3―4 周 英文资料查找及翻译,完善搭接方案 5―8 周 进行模型搭接,并完成最终模型 9―12周 完成模型软件部分设计 13―14周 完成论文初稿,拍摄作品动作视频 15―16周 论文修改并定稿,参加答辩 Ⅳ、主要参考资料: [1] 《机电创新实践教程》 周军 河海大学出版社 [2] 《机械原理》 申永胜 清华大学出版社 [3] 《机械设计》 濮良贵 高等教育出版社 [4] 《慧鱼创意机器人设计与实践教程》 曲凌 上海交通大学出版社 指导教师: 安翠翠 , 2011 年 12 月 20 日 学生姓名: 付泽 , 专业年级:机械工程及自动化2008级 系负责人审核意见(从选题是否符合专业培养目标、是否结合科研或工程实际、综合训练程度、内容难度及工作量等方面加以审核):
该课题来自实际情况,符合机械工程及自动化专业的培养目标,对学生进行多方面的综合训练,内容难度及工作量均符合要求。 系负责人签字: 年 月 日摘要 慧鱼创意组合模型(fischertechnik)诞生于德国,是技术含量很高的工程技术类智趣拼装模型,是展示科学原理和技术过程的理想教具,。慧鱼创意组合模型包含了机械、电子、控制、气动、汽车技术、能源技术和机器人技术等领域和高新学科,利用工业标准的基本构件(机械元件/电气元件/气动元件),辅以传感器、控制器、执行器和软件的配合,运用设计构思和实验分析,可以实现任何技术过程的还原,更可以实现工业生产和大型机械设备操作的模拟。
一.使用背景 随着国家经济的发展,环境污染越发严重,水体污染更是重中之重,但是清理水中垃圾单靠人力清理十分困难,基于这种情况,慧鱼模型的仿真技术来模拟仿真一个具有创新功能的全自动功能的垃圾清扫船。它可以清理漂浮垃圾,大型块状垃圾,更为重要的是不需要人来操作,实现全自动清扫垃圾。
二.机械电器结构 垃圾清理船通过各种结构,如气动,齿轮齿条,凸轮,丝杠螺母。来实现清理工作,本文具有大量的机械结构,具有垃圾清理,垃圾分类,垃圾压缩,垃圾移动,大型垃圾的抓取等装置,通过这些装置可以使垃圾清理船能够轻而易举的完成基本任务,传感器是机械结构能够完美运行的保证,本文运用超声波距离传感器,光电传感器,光敏传感器等实现了船体的精确定位。实现了机械和电器的完美结合。
三,软件构成 应用ROBO软件通过软件的编写可以方便的实现所有机构的准确运行.ROBO软件为图表式编程。ROBO软件的人性化编程界面可以给用户提供良好的人机交互。它具有数字量,模拟量的编辑方法,可以使用户自由选择。 慧鱼模型在本文中依靠其良好的塑造性。成功的模拟出垃圾清理船的具有的实体结构和功能的实现。,
关键词:慧鱼 漂浮垃圾处理 大型块状垃圾处理 垃圾清理船Abstract
Fischer creative combination model (fischertechnik) was born in Germany, is a technology-intensive engineering and technical intellectual interest in the assembly model is the ideal teaching aids that demonstrate scientific principles and technical processes. Fischer creative combination model includes the field of mechanical, electronic, control, pneumatic, automotive technology, energy technology and robot technology and high-tech disciplines, using industry standard components (components of the mechanical / electrical components / pneumatic components), supplemented by sensor controllers, actuators and software with the use of the design concept and experimental analysis, can achieve the reduction of any technical process, industrial production and large-scale machinery and equipment operation simulation.
1. Use Background More serious with the national economic development, environmental pollution, water pollution is the most important, but human clean-up alone is very difficult to clean water, garbage, based on this case, the the Fischertechnik model simulation technology to simulate the simulation of a innovative features the automatic function of scavenging boat. It can clean up floating garbage, large block junk, more importantly, does not require people to operate, to achieve automatic scavenging。
2. Machinery and electrical structure Garbage clean up the ship through a variety of structures, such as pneumatic, rack and pinion, cam, screw nut. To achieve the clean-up work, this article has a lot of mechanical structure, with refuse removal, refuse, and garbage compression, junk mobile, large garbage crawl devices, these devices can make garbage clean-up boat can easily complete basic tasks, the sensor is mechanical structure to the perfect operation of the guarantee in this paper the use of ultrasonic distance sensors, photoelectric sensors, light sensors, to achieve the precise positioning of the hull. To achieve the perfect combination of mechanical and electrical。
3. the software component ?Application ROBO software through the preparation of the software can facilitate the realization of the exact operation of all agencies. ROBO software chart programming. ROBO software user-friendly programming interface to provide users with good human-computer interaction. It has digital and analog editing, and allows the user freedom of choice.
The Fischertechnik model in this paper rely on its good shaping. The successful simulation of the implementation of the garbage clean up the boat with a solid structure and function.
Keywords:Fishcher Floating garbage disposal Large massive waste disposal Waste clean-up boat