高精度测距方法研究
- 格式:pdf
- 大小:121.91 KB
- 文档页数:2
基于重采样技术的调频连续波激光绝对测距高精度及快速测量方法研究∗孟祥松;张福民;曲兴华【期刊名称】《物理学报》【年(卷),期】2015(0)23【摘要】Frequency modulated continuous wave (FMCW) laser ranging is one of the most interesting techniques for precision distance metrology. It is a promising candidate for absolute distance measurement at large standoff distances (10 to 100 m) with high precision and accuracy, and no cooperation target is needed during the measuring process. How to improve the measurement resolution in practice has been the research focus of the FMCW laser ranging in recent years. <br> FMCW laser ranging system uses the method which may convert the measurement of flight time to the frequency measurement, while the ranging resolution can be determined by the tuning range of the optical frequency sweep in theory. The main impact-factor that reduces the resolution is the tuning nonlinearity of the laser source, which may cause an amount of error points within the sampling signal. So a dual-interferometric FMCW laser ranging system is adopted in this paper. Compared to the traditional Michelson scheme, an assistant interferometer is added. The assistant interferometer has an all-fiber optical Mach-Zehnder configuration, and the delay distance is at least 2 times longer than OPD (optical pathdifference) of the main interferometer. Because it provides the reference length, the length of the fiber must remain unchanged. The interference signal is obtained on the photodetector. At the time points of every peak and bottom of the auxiliary interferometer signal, the beating signal from the main interferometer is re-sampled. The original signal is not the equal time intervals, while the re-sampled signal is the equal optical frequency intervals. Based on the property of the re-sampled signal, a method by splicing the re-sampled signal to optimize the signal processing is proposed, by which the tuning range of the laser source limitation can be broken and high precision can be easily obtained. Also, a simple high-speed measuring method is proposed. <br> Based on all the above principles, the two-fiber optical frequency-modulated continuous wave laser ranging system is designed. The delay fiber in the FMCW laser ranging system is 40.8 m long, and the tuning speed and tuning range of the laser source are set to 10 nm/s and 40 nm respectively. Experiments show that the optimization method can effectively improve the measurement resolution and measuring efficiency; in the 26 measuring ranges, 50 µm resolution can be easily obtained and the error is less than 100 µm.【总页数】7页(P230501-1-230501-7)【作者】孟祥松;张福民;曲兴华【作者单位】天津大学精密测试技术及仪器国家重点实验室,天津 300072;天津大学精密测试技术及仪器国家重点实验室,天津 300072;天津大学精密测试技术及仪器国家重点实验室,天津 300072【正文语种】中文【相关文献】1.调频连续波激光测距补偿方法研究 [J], 宋一铄;赵继广2.激光调频连续波测距的精度评定方法研究 [J], 潘浩;曲兴华;史春钊;李雅婷;张福民3.三光路结构的调频连续波重采样测距方法 [J], 张桐; 曲兴华; 张福民4.基于气体池信号拼接的高精度调频连续波激光测距 [J], 伊灵平;张福民;曲兴华;李雅婷5.基于车载调频连续波测距的激光调制系统设计 [J], 韦美丽;杨墨;肖经;蔡凯达;朱新锋因版权原因,仅展示原文概要,查看原文内容请购买。
基于单目视觉的实时测距方法研究论文摘要:测距是计算机视觉领域中的重要问题之一,在许多应用中都有广泛的应用。
本文提出了一种基于单目视觉的实时测距方法。
该方法利用单目相机拍摄到的图像进行目标的距离估计,不需要额外的传感器或设备。
首先,通过标定相机获取相机的内参数矩阵和畸变参数。
然后,使用特征点匹配算法对图像中的特征进行提取和匹配,得到特征点的对应关系。
接下来,利用三角测量原理计算出目标特征点在相机坐标系下的深度值。
最后,通过相机的内参数矩阵和深度值可以得到目标物体在相机坐标系下的三维坐标,从而实现了测距。
实验结果表明,该方法能够在实时场景中实现准确的测距,具有很大的应用潜力。
关键词:单目视觉,测距,内参数矩阵,特征点匹配,三角测量1. 引言随着计算机视觉技术的发展,测距问题在很多领域中得到了广泛的研究和应用。
利用视觉传感器进行测距是一种常见的方法,它可以在没有额外传感器的情况下实现目标的距离估计。
单目视觉是一种简单且成本相对较低的测距方式,因此在实际应用中具有重要的意义。
2. 方法本文提出的实时测距方法基于单目视觉,核心原理是利用特征点匹配和三角测量。
首先,通过标定相机获取相机的内参数矩阵和畸变参数。
内参数矩阵包括焦距和像素尺寸等参数,畸变参数用于修正图像的畸变。
然后,利用特征点匹配算法对图像中的特征进行提取和匹配。
特征点的提取可以使用SIFT、SURF等算法,匹配可以使用最近邻算法或RANSAC算法。
在特征点匹配完成后,可以得到特征点的对应关系。
接下来,根据三角测量原理计算出目标特征点在相机坐标系下的深度值。
三角测量原理利用目标在不同视角下的投影关系,通过三角形的边长比例计算出目标的深度。
最后,通过相机的内参数矩阵和深度值可以得到目标物体在相机坐标系下的三维坐标,从而实现了测距。
3. 实验结果对于本方法的实验结果进行了验证。
选取了不同距离的目标物体进行测距实验,并与实际距离进行比较。
结果表明,本方法能够在实时场景中实现准确的测距,与实际距离具有较小的误差。
如何进行精确测量与定位引言:在人类的历史长河中,精确测量与定位一直是极为重要的技术。
无论是古代测绘师为了描绘地形而使用的简单工具,还是现代GPS系统的高精度测量设备,精确测量与定位能力对于人类社会的发展和进步至关重要。
本文将分析和探讨如何进行精确测量与定位,希望能给读者提供一些启发和思考。
第一部分:测量原理与方法一、三角测量法三角测量法是一种常用且有效的测量方法。
它基于三角形的性质,通过测量已知边长和角度,计算和确定未知边长和角度。
三角测量法的精确性来源于其准确的测量原理和严密的数学计算。
二、电子测量仪器随着科技的不断发展,电子测量仪器的出现提升了测量与定位的精确度。
例如,全球定位系统(GPS)可以利用卫星信号精确定位,测量结果具备很高的精确性和可靠性。
此外,其他电子测量仪器如激光测距仪、电子经纬仪等也广泛应用于工程测量和地貌测绘中。
第二部分:应用领域与案例分析一、土地测量与规划在土地测量与规划中,精确测量与定位是不可或缺的。
通过各种测量手段和仪器,可以准确测量土地的边界和面积,并为土地规划和管理提供依据。
例如,某城市规划部门使用GPS测量技术和地理信息系统(GIS)进行城市道路和建筑物的精确定位,确保城市规划的有效实施。
二、工程测量和设计在工程领域,精确测量与定位对于工程设计和施工至关重要。
测量的准确性决定了工程项目的可行性和质量。
通过使用激光测距仪、经纬仪等仪器,可以实现工程测量的高精度,提高工程设计的准确性和稳定性。
例如,在地铁隧道建设中,使用精确测量和定位技术能够确保隧道施工的安全性和有效性。
三、地质灾害监测精确测量与定位在地质灾害监测中发挥着重要作用。
通过使用遥感技术和地面测量仪器,可以准确测量地质灾害的范围和变化趋势,提前预警和采取相应的防灾措施。
例如,在山体滑坡监测中,通过精确的测量和定位,可以及时发现土壤松动和位移,保护人民生命财产安全。
结论:精确测量与定位在不同领域的应用越来越广泛,为人类社会的发展和进步做出了重要贡献。
工业设备安装中高精度测量方法探讨王先政摘要:随着我国科学技术的进步和发展,工业设备安装工程中对安装的精度有了更高的要求。
特别是跨度大、距离长、运转速度高的自动化生产线的设备安装。
根据这一现状,就需要相关人员加强对工业设备安装中高精度测量方法的分析和探讨。
关键词:科学技术、工业设备、高精度、测量方法、分析一、测量放线的准备工作以及具体操作流程1、准备工作通过厂房原始的纵横向的控制点,借助精密仪器测量出厂房内设备的中心线和平等、垂直此中心线的纵横辅助中心线,并且在纵向辅助中心线上设立各个控制点,进而建立起基准线网格。
2、施工的具体操作流程制作控制点基准标板,对底层纵横中心线、底层纵向辅助中心线、底层纵向辅助中心线上各距离控制点的起点、底层纵向辅助中心线上各距离控制点等进行确定,其他层基准线网格投测、方法与底层测设方法相同。
二、安装工业设备的测量具体方法1、制作、预埋控制点基准标板一般而言,首先要将钢板预埋在选定好的控制点上,为了使控制点得到长期的保留,可以选择厚度为10毫米的不锈钢板来进行边长为100毫米正常形基准标板的制作,上部加盖板、下部焊铆劲,同时使用螺栓来将标板和盖板连接起来,进而对基准点进行保护。
制作好基准线板之后,可以对混凝土进行浇筑,这就需要对标板进行精确的定位然后再进行预埋。
在养护的时候,需要定期逐个进行检查和复测,进而确保基准标板的稳定性和牢固性。
2、测定底层纵向辅助线距离控制点在确定好纵向辅助线上的各距离控制点起点以后,需要使用距离差取平均测距法来对各距离控制点加以测量,在使用这种方法的时候,对其误差出现造成比较大影响的方面主要有两个:第一,加权常数误差;第二,周期误差。
由于受到仪器内部电路的影响,测量的结构会随着距离的长短体现出周期性的变化,而这种变化的范围就是周期误差。
使用距离差取平均测距法,可以有效避免上述两项误差带来的影响。
测定时,选取 Y1Y2为测距波长的四分之一,即可将加权常数误差和周期误差的影响消除,实现测距精度的提高。
如何使用地面控制点进行高精度测量引言:在现代测量技术的发展中,地面控制点是一种重要的测量工具。
它能够为测量提供可靠的基准和参考,使测量结果具有高精度和可信度。
本文将探讨如何使用地面控制点进行高精度测量,包括地面控制点的选择、布设、测量方法和数据处理。
一、地面控制点的选择地面控制点的选择是高精度测量的关键一步。
在选择地面控制点时,需要考虑以下因素:1. 位置:地面控制点应分布在测区范围内,以覆盖需要测量的区域。
同时,地面控制点的位置应尽量接近参考坐标系的原点,以减小可能的系统误差。
2. 数量:地面控制点的数量应根据测区的复杂程度和所需测量精度进行合理的估计。
一般来说,地面控制点的数量越多,测量的精度越高。
3. 稳定性:地面控制点应选择地势稳定、不易移动的点位。
避免选择在施工现场、交通要道或地质活动频繁的区域进行布设。
二、地面控制点的布设地面控制点的布设是实施高精度测量的基础。
在布设地面控制点时,需要注意以下几点:1. 布设密度:地面控制点的布设密度应根据实际测量需求进行调整。
在测量区域相对较大、地形复杂、测量精度要求较高时,应增加地面控制点的数量和密度。
2. 布设方式:地面控制点的布设方式可采用不同的方法,如使用测量设备固定在地面上,或安装在建筑物、桥梁等结构物上。
根据实际情况选择合适的布设方式。
3. 标志物:地面控制点应设置明显的标志物,以便于后续的测量和定位。
标志物可以是铁钉、石碑、钢管等。
同时,应在标志物上标明控制点的编号和坐标信息。
三、地面控制点的测量方法地面控制点的测量方法通常包括以下几种:1. GNSS测量:GNSS(Global Navigation Satellite System)是一种基于卫星导航的测量技术。
通过使用GNSS接收器接收卫星信号,可以实现对地面控制点的高精度测量。
在进行GNSS测量时,需要选择合适的卫星接收器和天线,并进行数据采集和处理。
2. EDM测量:EDM(Electronic Distance Measurement)是一种使用电子测距仪进行测量的方法。

卫星测距的原理(一)卫星测距卫星测距是一种利用卫星技术进行距离测量的方法。
通过测量卫星与地面上的特定点之间的时间差,可以精确计算出两点之间的距离。
以下是关于卫星测距的一些相关原理。
原理一:卫星轨道卫星测距依赖于卫星的轨道,而卫星的轨道受到地球引力的影响。
卫星通常处于圆形、椭圆形或近地点高度轨道上。
这些不同类型的轨道会对测距的精度产生影响。
•圆形轨道:卫星处于固定高度的圆形轨道上,便于测距的计算。
•椭圆形轨道:卫星沿着椭圆形轨道运行,测距需要考虑卫星位置的变化。
•近地点高度轨道:卫星的轨道离地面较近,需要考虑大气层的影响。
原理二:测距方法卫星测距主要有两种方法:单点测距和双点测距。
单点测距单点测距是指利用单个卫星与地面上一个接收器之间的信号传输时间来计算距离。
该方法的原理如下:1.卫星发射一个信号,信号经过大气层传播到达地面上的接收器。
2.接收器接收到信号后,开始计时,并记录接收到信号的时间。
3.接收器将接收到的时间信息传输给测距系统进行计算。
4.测距系统利用已知的速度光在大气中传播的速度,乘以信号传输时间,计算出距离。
双点测距双点测距是指利用两个接收器分别接收卫星信号,并测量信号到达每个接收器的时间差。
该方法的原理如下:1.首先,确定两个接收器之间的距离,可以通过测量其经纬度坐标或使用已知的地理信息。
2.两个接收器同时接收卫星信号,并记录到达时间。
3.接收器将接收到的时间信息传输给测距系统进行计算。
4.测距系统利用两个接收器之间的距离,以及到达时间的差异,计算出距离。
原理三:测距误差在卫星测距中,还会存在一些误差,影响测量的精度。
以下是一些常见的测距误差:•信号传播时间:信号在大气层中的传播速度可能受到天气条件和大气密度的影响,从而导致测距误差。
•时钟误差:卫星和接收器上的时钟可能存在差异,会引起时间测量误差。
•大气效应:大气层中的湿度、温度和其他环境因素,会对信号的传播速度造成影响。
•地球引力变化:地球的引力场可能会导致卫星轨道发生微小的变化,从而引起测距误差。
高精度工程测量技术在建筑施工中的实用方法与案例近年来,随着科技的快速发展,高精度工程测量技术在建筑施工领域得到了广泛应用。
这些先进技术的出现,为工程测量带来了革命性的变化,大大提高了测量的精度和效率。
本文将着重介绍高精度工程测量技术在建筑施工中的实用方法和案例。
一、激光测距技术激光测距技术是目前广泛应用于建筑施工领域的一种高精度测量技术。
它利用激光器发射出的光束,经过被测物体的反射后再回到仪器,通过测量光束的往返时间来计算出被测物体与测量仪的距离。
这种技术具有精度高、测量速度快、操作简便等优点。
以一栋高层建筑的垂直度测量为例,传统的测量方法需要使用水平仪和测角仪进行多次测量,并进行复杂的计算,非常繁琐且误差较大。
而采用激光测距技术,只需要在建筑的不同楼层设置测量仪器,通过测量仪器之间的高度差和楼层的高度,便可以快速准确地计算出建筑的垂直度,大大提高了测量的精度和效率。
二、全站仪技术全站仪是一种综合了测角、测距和测高等功能的高精度测量设备,它通过激光测距和测角仪的组合,可以同时进行水平角、垂直角和距离的测量,具有精度高、测量速度快的特点,广泛应用于建筑施工中。
在大型建筑物的定位和布点中,全站仪技术起到了非常重要的作用。
传统的定位方法需要使用传统测量工具进行多次测量,并进行复杂的计算才能得出准确的坐标。
而采用全站仪技术,只需要在已知的测点进行测量,然后通过全站仪中的软件进行坐标变换即可快速得到目标点的坐标,大大提高了测量的精度和效率。
三、三维激光扫描技术随着数字化建筑的快速发展,三维激光扫描技术在建筑施工中得到了广泛的应用。
这种技术利用激光扫描仪器,通过向建筑物表面发射激光束,并接收被测物体反射回的光束,通过计算激光束的往返时间和光的速度,可以得到建筑物表面点的三维坐标信息。
在建筑施工中,三维激光扫描技术主要应用于建筑物的变形监测和质量检查。
例如,在长时间的施工过程中,建筑物的自然沉降或工程过程中出现的变形可能会对建筑物的稳定性和安全性产生重大影响。
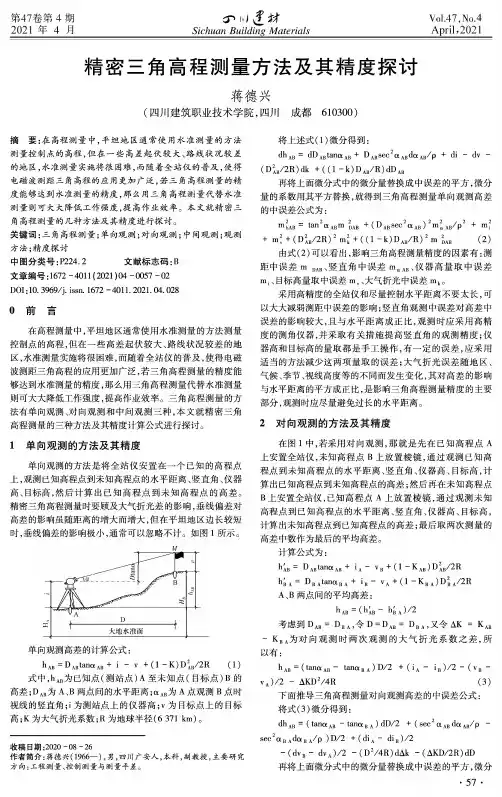
第47卷第4期6|J送拥Vol.47,No.4 2021年4月Sichuan Building Materials April,2021精密三角高程测量方法及其精度探讨蒋德兴(四川建筑职业技术学院,四川成都610300)摘要:在高程测量中,平坦地区通常使用水准测量的方法测量控制点的高程,但在一些高差起伏较大、路线状况较差的地区,水准测量实施将很困难,而随着全站仪的普及,使得电磁波测距三角高程的应用更加广泛,若三角高程测量的精度能够达到水准测量的精度,那么用三角高程测量代替水准测量则可大大降低工作强度,提高作业效率。
本文就精密三角高程测量的几种方法及其精度进行探讨。
关键词:三角高程测量;单向观测;对向观测;中间观测;观测方法;精度探讨中图分类号:P224.2文献标志码:B文章编号:1672-4011(2021)04-0057-02D01:10.3969/j.issn.1672-4011.2021.04.0280前言在高程测量中,平坦地区通常使用水准测量的方法测量控制点的高程,但在一些高差起伏较大、路线状况较差的地区,水准测量实施将很困难,而随着全站仪的普及,使得电磁波测距三角高程的应用更加广泛,若三角高程测量的精度能够达到水准测量的精度,那么用三角高程测量代替水准测量则可大大降低工作强度,提高作业效率。
三角高程测量的方法有单向观测、对向观测和中间观测三种,本文就精密三角高程测量的三种方法及其精度计算公式进行探讨。
1单向观测的方法及其精度单向观测的方法是将全站仪安置在一个已知的高程点上,观测已知高程点到未知高程点的水平距离、竖直角、仪器高、目标高,然后计算出已知高程点到未知高程点的高差。
精密三角高程测量时要顾及大气折光差的影响,垂线偏差对高差的影响虽随距离的增大而增大,但在平坦地区边长较短时,垂线偏差的影响极小,通常可以忽略不计。
如图1所示。
h AB ab tana AB+i-v+(1-K)D:b/2R(1)式中,hAB为已知点(测站点)A至未知点(目标点)B的高差;D ab为A、B两点间的水平距离;o^b为A点观测B点时视线的竖直角;i为测站点上的仪器高;v为目标点上的目标高;K为大气折光系数;R为地球半径(6371km)o收稿日期:2020-08-26作者简介:蒋德兴(1966—),男,四川广安人,本科,副教授,主要研究方向:工程测量、控制测量与测量平差。
光频率梳测距原理引言:光频率梳测距原理是一种精确测量距离的技术,它利用光频率梳的特性来实现高精度的测距。
本文将介绍光频率梳测距原理的基本概念、工作原理、应用领域以及未来发展方向。
一、基本概念:光频率梳是一种能够产生非常稳定、均匀的光脉冲序列的装置。
它的频率是以确定的间隔均匀分布的,就像梳子的齿一样。
这种分布在频谱上呈现为一系列锐利的光谱线,因此被称为光频率梳。
光频率梳的频率间隔非常精确,可以用来测量时间和频率。
而光频率梳测距原理则是利用光频率梳的特性来实现高精度的距离测量。
二、工作原理:光频率梳测距原理的基本思想是利用光频率梳的频率间隔和测量物体反射的光的时间差来计算距离。
当激光照射到目标物体上时,部分光线会被反射回来。
通过测量反射光的时间差,可以计算出光的传播时间,从而得到距离。
具体实现光频率梳测距的方法有多种,其中一种常用的方法是利用干涉原理。
将光频率梳的光和反射光进行干涉,通过测量干涉条纹的移动来计算光的传播时间,进而计算出距离。
这种方法具有高精度、高可靠性的特点,广泛应用于科学研究和工业领域。
三、应用领域:光频率梳测距原理在许多领域都有广泛的应用。
其中一个重要的应用是在激光测距仪中。
激光测距仪是一种常用的测距设备,利用光频率梳测距原理可以实现高精度的测距。
这种测距仪广泛应用于建筑、测绘、地质勘探等领域。
光频率梳测距原理还可以应用于雷达测距。
传统的雷达测距方法一般利用电磁波的传播时间来计算距离,而光频率梳测距原理可以实现更高的测距精度。
因此,在一些对测距精度要求较高的应用场景中,如航天、军事等领域,光频率梳测距技术被广泛采用。
四、未来发展方向:随着科技的不断进步,光频率梳测距原理在未来有着广阔的发展前景。
一方面,随着光学技术的发展,光频率梳的性能将进一步提高,频率间隔将更加精确,测距精度将更高。
另一方面,光频率梳测距原理将与其他测距技术相结合,例如与激光雷达、相位测量等技术的结合,可以实现更多样化的测距应用。
距离测量的四种方法全文共四篇示例,供读者参考第一篇示例:距离测量一直是人类历史上重要的技术之一,它在建筑、土地测量、航海、地图绘制以及科学研究等领域都发挥着不可替代的作用。
随着科技的不断发展,测量方法也在不断更新和完善,为我们提供更加精确可靠的数据。
在本文中,我们将介绍目前常用的四种距离测量方法,它们分别是直接测量法、间接测量法、卫星定位法和激光测距法。
直接测量法是最直观、最常见的测量方法之一,它通过实际测量目标与测量仪器之间的距离来确定两点之间的距离。
这种方法适用于较短距离的测量,例如在建筑工地上测量两点之间的距离。
直接测量法的优点是简单易行,但也存在一些缺点,例如在复杂地形下很难进行准确测量。
卫星定位法是目前最先进的距离测量技术之一,它通过卫星信号和地面接收器来确定两点之间的距离。
全球定位系统(GPS)就是其中一个十分常用的卫星定位系统,它可以实现几米甚至厘米级的精度。
卫星定位法适用于需要高精度测量的场景,例如在道路建设和农业领域。
尽管卫星定位法具有高精度和全球覆盖的优势,但也存在着信号受阻碍的问题,例如在城市高楼林立的地区信号可能会受到干扰。
激光测距法是一种基于激光技术的距离测量方法,它通过测量激光脉冲的时间差来确定两点之间的距离。
激光测距法具有高精度和快速测量的优势,适用于各种场景,例如在建筑测量和地质勘探中。
激光测距法在复杂环境下可能会受到干扰,例如在强光影响下可能会影响测量精度。
不同的距离测量方法各有优缺点,我们根据具体的需求和场景选择合适的方法来进行测量工作。
随着科技的不断进步,距离测量技术也在不断创新和完善,为我们提供更加精确、快速、便捷的测量服务。
希望通过本文的介绍,能够让大家更加了解距离测量方法的种类和特点,为实际应用提供参考和指导。
第二篇示例:距离的测量是我们生活中经常使用的一项技术。
无论是衡量两地之间的距离,还是确定一个物体的大小,距离的测量都是至关重要的。
在现代科技发展的进程中,我们已经掌握了多种距离测量的方法,每种方法都有其独特的优势和适用场景。
光频率梳测距原理引言:光频率梳测距是一种基于光频率梳技术的测距方法,利用光频率梳的高频率稳定性和宽频带特性,实现了高精度的测距。
本文将详细介绍光频率梳测距原理及其应用。
一、光频率梳测距原理概述光频率梳是一种高度稳定的光源,其频率间隔非常均匀,可以被用来精确测量光信号的频率。
光频率梳测距利用光脉冲的到达时间和光频率的偏移量来计算距离。
具体原理可分为以下三个步骤:1. 信号发射:通过激光器产生一系列非常短的光脉冲,并将其发射到目标物体上。
2. 信号接收:目标物体反射回来的光脉冲被接收器接收,并转换为电信号。
3. 频率分析:将接收到的光信号与光频率梳进行频率比较,通过测量频率的偏移量来计算出光脉冲的到达时间,从而得到目标物体与测距设备的距离。
二、光频率梳测距的优势光频率梳测距具有以下几个优势:1. 高精度:光频率梳具有非常高的频率稳定性和精确度,可以实现亚皮秒级的时间分辨率,从而实现高精度的测距。
2. 宽频带:光频率梳具有宽带特性,可以同时测量多个目标物体的距离,提高测距效率。
3. 非接触式:光频率梳测距是一种非接触式的测量方法,不会对目标物体产生损伤,适用于对目标物体表面要求较高的应用场景。
4. 可远距离测量:光频率梳测距技术可以实现远距离的测量,适用于地球观测、天文学等领域。
三、光频率梳测距的应用光频率梳测距技术在许多领域都有广泛的应用,以下是其中几个典型应用场景:1. 天文观测:光频率梳测距技术可以用于测量天体之间的距离,帮助科学家研究宇宙的结构和演化。
2. 遥感测量:光频率梳测距技术可以用于测量地球表面的高程、变形和运动等信息,对地质灾害监测和环境变化研究具有重要意义。
3. 光纤通信:光频率梳测距技术可以用于光纤通信系统中的精确定时和距离测量,提高通信系统的性能和稳定性。
4. 目标识别:光频率梳测距技术可以用于目标识别和跟踪,例如军事侦察、自动驾驶等领域。
5. 生命科学:光频率梳测距技术可以用于生命科学研究中的细胞成像、蛋白质结构测定等领域,提供高分辨率和高精度的测量手段。
精确测量方法介绍测量是科学研究、工程实践和日常生活中必不可少的环节。
然而,为了获得准确的测量结果并得出令人满意的结论,我们需要使用精确测量方法。
本文将介绍一些常见的精确测量方法,以帮助读者更好地理解和应用这些方法。
一、传感器技术传感器技术是现代测量中的重要组成部分。
它利用物理和化学原理,将待测量的信号转换成电信号,并通过电路进行处理和分析。
传感器的选择至关重要,因为它直接影响测量的精确度和准确性。
在传感器技术中,常用的方法包括电阻传感器、电容传感器、压力传感器、温度传感器等。
例如,电阻传感器通过电阻值的变化来测量待测量,而电容传感器则通过电容值的变化来测量。
这些传感器通常具有高灵敏度和稳定性,可以实现精确的测量。
二、标准参考物质在测量中,标准参考物质被广泛应用于校准和比对仪器。
标准参考物质是一种已知特性的物质,其性质可与待测量进行比对,从而确定测量结果的准确性。
标准参考物质可以是物理量(如长度、质量等)或化学量(如浓度、纯度等)。
例如,在化学分析中,常用的标准参考物质包括标准溶液、标准样品等。
这些标准参考物质可以通过与待测样品的比对,确定样品的浓度或纯度,从而实现准确的分析结果。
三、精密仪器精密仪器是进行精确测量的重要工具。
这些仪器通常具有高分辨率、高精度和高稳定性,可以实现高精度的数据采集和处理。
在物理测量中,常用的精密仪器包括电子天平、激光测距仪、光谱仪等。
这些仪器可以通过高精度的传感器和电路来实现准确的测量。
例如,激光测距仪利用激光光束的反射原理,测量物体与仪器之间的距离,具有高精度和高稳定性。
四、数据处理和分析数据处理和分析是精确测量中的关键步骤。
准确的数据处理和分析可以提高测量结果的质量,并得出可靠的结论。
在数据处理和分析中,常用的方法包括统计分析、图像处理、回归分析等。
统计分析可以对数据进行整理和统计,计算均值、标准差等统计量。
图像处理可以对图像进行增强和滤波,提取出所需的信息。
回归分析可以通过建立数学模型来预测和分析数据。
激光雷达测距技术的应用激光雷达测距技术是一种利用激光束对目标进行距离测量的技术。
它是一种高精度的测距方法,可用于制图、地形测量、机器人导航、自动驾驶等领域。
下面将从这些方面详细探讨激光雷达测距技术的应用。
一、制图制图是激光雷达测距技术最常见的应用之一。
通过利用激光雷达测量目标位置和高程,可以快速获得高精度地形图和三维模型。
这项技术在城市规划、建筑设计、道路建设等方面具有广泛应用。
例如,利用激光雷达测量建筑物高度和形状,可以更准确地预测建筑物对周围环境的影响,提高城市规划的精度;利用激光雷达测量道路、铁路等设施的高程和位置信息,可以更好地优化交通路线,提高交通运输的效率。
二、地形测量除了制图,激光雷达测距技术还广泛应用于地形测量。
地形测量是指对地表形态、地貌特征等进行测量、刻画和研究的过程。
通过激光雷达测距,可以快速、准确地获取地表高程、地表走向和倾斜角度等信息。
在地理信息系统(GIS)和测绘领域,激光雷达测距技术已经成为一种标准测量方法。
利用激光雷达测距技术,可以制作出高精度的数字地形图和数字地形模型,对于土地开发、水利工程、城市规划等方面具有重要作用。
三、机器人导航机器人导航是指机器人通过激光雷达测距技术,精确定位、测量并规划路径,以实现自主导航的过程。
机器人通常会配备多个激光雷达,以获得更精确的测距数据。
在机器人导航领域,激光雷达测距技术可以被用于垂直障碍物检测、地面障碍物检测、环境感知和避障等方面。
例如,在工业自动化领域,机器人可以利用激光雷达测距技术,在无人值守的情况下完成物料搬运、装配和测试等任务。
四、自动驾驶自动驾驶是近年来最为热门的技术,它使用传感器和计算机控制机器人、汽车等交通工具。
在其中,激光雷达是实现自动驾驶的核心技术之一。
通过激光雷达测距,可以在汽车行驶过程中快速、准确地检测到前方的障碍物,以保证安全行驶。
在自动驾驶汽车的研究和实践中,激光雷达测距技术已经成为必不可少的技术之一。
测控技术
高精度测距方法研究
中国电子科技集目公司第54研究所陈仕进
摘要
在卫星测控系境中传统的洲距方法主要有徊音测_距及伪码测距,文中提出了另一神适舍于航天刺控系统的
测距方法:伪码扩额信一g-柚测距方法,井就遗三种测距方法的优缺点进行了讨论。
关键词
测距侧音测距伪码档4距伪码扩烦信息帧测距
1概述
测距的基本原理是利用电磁波在空间以有限速
度传播、并且当它通过均匀媒质传播时,其传播距离随
传播相位作线性变化。因此信号到目标问的距离为
式中,c为电磁波在自由空间的传播速度,等于光速;r为信号从测量站到目标间的往返时延。因此在实际的测距系统中,我们通常通过测量时间r来实现测距。在传统测控系统中测距方法主要包括侧音测距及伪码测距。侧音测距是利用正弦信号经过目标的往返距离所对应的相位变化掌来进行距离测量,其测距公式如下:(2)原理上我们只能测出p<360。的精确值,如果相位∞能以任意的精度测量出来,那么,只要信号的半波长大于被测距离,利用一个正弦波信号就能满足测距的要求。但是,由于噪声和通道特性对信号的影响,将不可避免的引入相位误差。根据式2可求出对应距离误差即与相位误差%的关系为:(3)由上式可看出,测距信号频率越低,对应的测距误差越大。因此,为了提高测距精度,必须提高测距正弦波的频率。为了解决测距模糊度及测距精度的矛盾.我们通常以一组正弦波信号作为测距信号称为侧音,其中低侧音保证测距距离,高侧音保证测距精度。在距离迅速增大时,纯侧音测距系统将产生一些难以解决的问题,如:所选谐波数增加,信号频谱占用带宽增大,能量分散;在很低的频率下滤波和防止互相串扰较困难,抗干扰能力差;设备量增多。因此,侧音测距系统很难实现远距离.澍量。另外一种方法是伪随机码测距,伪随机码信号具有良好的周期自相关特性,其测距精度取决于码元宽度,周期可设计为任意长,无模糊距离随码长增加而成正比增加。最大测距距离为R。。=音出(4)式中,c为电波传播速度,P为码长,△为码元宽度。对于伪码测距,为了保证最大的作用距离的模糊分辨度,码序列的周期T应大于信号对目标往返距离对应的最大时延r。。;为了得到要求的测距精
度,码元宽度△应取足够小;为了准确捕获,要求测
距码自相关峰足够尖锐。对于深空测距,这就要求
伪码周期足够长,这给伪码捕获同步带来一定困难。
侧音测距及伪码测距对于远距离测距都有一定
的匿难,本文提出了一种比较适合远距离测距方法:
伪码扩频信息帧测距方法。
2伪码扩频信息帧测距方法原理
为了解决侧音测距及伪码测距,对于远距离测
距与提高测距精度的矛盾,我们提出了一种新的高
精度测距方法:伪码扩频信息帧测距。它是利用高
速伪码对信息进行扩频,一个信息位内填一个伪码
周期,每一帧信息内,利用帧同步作为测距标志信
息。它通过提高扩频码的码片速率来提高测距精
度,通过增加信息帧的长度来解决测距的距离模糊。
测距示意图如图l示,前向、反内链路信息均采
用伪码扩频,每一信息位内填伪码的完整周期,前向
链路与反向链路的信息帧速率、信息速率及伪码速
率均相干。主站信息编帧、扩频后,利用前向链路发
送到副站上;副站应答机接收到前向链路信号后鳃
扩、解调、帧同步提取,得到前向链路的时钟信息及
帧同步信号;副
站应答机利用
它形成反向链
路的遥测帧、扩
频伪码,经扩频
后由反向链路
送回主站;主站
接收到反向链
图1测距原理示意目
收稿日期:2003年8月15日
万方数据
测控技术
路信号后解扩、解调、帧同步提取,得到反向链路的帧同步信号,与前向链路的帧同步字比较,就得到了信号在主站与副站间传输的双程时延T,由此可计算出主站与副站的距离。这种测距方法的实质是利用信息帧的时延测距,传统解调信息的前后沿抖动是很大的,不能保证测距精度,但是由于扩频码与信息相干,一个信息码内填~完整的伪码周期,所以可以用扩频码的特征相位作为信息码的位同步信号,这样测距精度就决定于接收端伪码跟踪的精度,而无模糊距离由信息帧帧长决定,可用于远距离测距。我国北斗一号就是利用这种方法,测距达16万km,精度很高。伪码扩频信息帧测距方法与侧音测距方法比较有很多优点:信息传输的同时实现了测距,不需要增加更多的硬件设备,实现简单,信息采用伪码扩频体制可降低空同功率谱密度,增加信息的保。密性,提高了信息的抗截获能力和抗干扰能力;另外,它的测距无模糊距离理论上可任意大,测距精度比侧音体制高,零值稳定性好。与纯伪码测距体制相比,解决了纯伪码测距体制中伪码捕获时间长的问题;另外由于采用伪码扩频,我们可以利用码分多址技术,实现在同一载波情况下同时对多站测距。3精度分析3.1时延测量精度分析影响时延测量精度的主要因素是主站测距机接收支路的测量随机误差和测距机零值系统误差、副站应答机接收支路的测量随机误差和测距机零值系统误差以及各种时间量化误差。(1)接收机随机误差影响接收机随机误差的主要因素是信号处理终端的伪码跟踪精度。伪码跟踪采用目前比较先进的窄相关数字匹配方案,这种方案易于数字化和集成化,稳定性和一致性极好。采用这种处理方案,接收机的码跟踪随机误差可以按下述经验公式计算:0-=[孤丽B了pr式中,口为接收机中频带宽,单位Hz;N为相关积累需要的码片数;c/No为接收机中频输出的载波功率与噪声功率谱密度比,单位dBHz;T为伪码的码片宽度,单位1715。即得主站测距机和副站应答机的接收随机误差。m和fYPA。(2)相关器时延量化误差由于采用并行匹配算法,那么各相关单元之问的相关间隔必将引起码跟踪的模糊,即所谓的时延量化误差。设相关单元的间隔为1/N个码片,于是
由此引起的测距机和应答机时延量化误差a。。和
dn^为:
一=am=[南]1“
(3)测距机时差测量量化误差
测距机的距离测量实际上是测量发射时标和接
收时标之间的时间差,~般采用计数法测量。如果
采用计数时钟频率为而,由于计数法测量会产生截
尾误差,因此测距机的时差量化误差OTR为:
am=(去)1,2
(4)测距机和应答机的设备零值误差口s。、口。
测距机和应答机的设备零值随环境变化所发生
的漂移是一种系统误差,经过标定后的设备零值在
测量过程中予以扣除后必将存在零值误差。若终端
部分采用数字方案,则该项误差主要来源于信道设
备的群时延稳定性。由于扩频系统使用的信道是宽
带信道,如码速率为10Mops的信道带宽应在20MHz
左右。这样的信道其绝对群时延较小,约为50ns,只
要控制设备的制作工艺和运行环境,其变化一般可
控制在t/10以下。
(5)总时延测量精度
根据上述各误差源的分析,影响时延测量精度
的主要因素是主站测距机和副站应答机的接收机随
机误差GPR和dm设备零值误差口sR和om、时延量化
误差咖和锄和测距机的时差量化误差口m,再考虑
其它因素引起的误差为・YTtt。由于这些误差项是相
互独立的,因此总的测距误差口。为:
a^=[dk+dk+dk+。毛+口‰+ak+d‰+口%]∽
上为双程测时误差,折算单程误差应乘以1/2。
4结论
伪码扩频信息帧测距方法同侧音测距比较,它
实现方法简单,在信息传输过程中实现了测距,由于
信息采用了扩频技术,降低了功率谱密度,提高了信
息的保密性,抗截获能力和抗干扰能力。同传统伪
码测距方法比较,其测距精度高,无模糊距离远,捕
码时问短。
.|.
●考文献
11]韩魁选等墙著.氍波统一洲拉系兢谩计平论.1984年3月第一版,
北京:田防工业出版社.1984
[2]壹光明等墙著.扩精通信西安:西鲁电于科技太学出版社,1990
作者筒介
陈仕进1974年出生,19蛄年毕业于桂林电子工业学院,中国电
子科技豪田拜司第五十四研究所工程师。从事扩频解扩、高速调制解
调、董分接方面工作,现研究方向为无人机测控、航是刺控、通信时抗。
2003年无线电^程弟33叁莽12期
23
万方数据