自走式柔性智能苹果采摘机设计
- 格式:pdf
- 大小:1.11 MB
- 文档页数:3
苹果采摘机的设计摘要:根据苹果收获的现状, 针对国内苹果的生产环境, 设计了一种基于人工辅助的简单苹果收割机。
分析了苹果收割机及其部件的结构和功能。
提出并实现了多级可调杆的设计。
提出并进行了基于重力原理的嵌套铁环输送和收集袋的设计。
苹果辅助收割机集采摘、收集、运输于一体, 适用于苹果、梨、等苹果采摘。
试验表明, 水果辅助收割机结构简单, 操作灵活, 效率高, 收获质量好, 能显著降低劳动强度, 降低成本, 具有较高的经济和实用生长趋势。
工业化, 人们对水果收获效率提出了越来越高的要求, 传统的人工收获方法效率低, 劳动力浪费等。
不足。
本文提出了一种新型的苹果皮卡机。
通过以往的结构设计、安装调试和后来的现场试验, 验证了该装置的可行性。
关键词:采摘;装置;设计目录第一章绪论 (3)1.1引言 (3)1.2 课题研究目的与意义 (4)1.3 国内外林果机械研究现状及分析 (5)1.3.1 国外林果机械研究现状 (5)1.3.2 国内林果机械研究现状 (6)1.3.3 我国林果采摘机械与国外的差距 (7)第二章机械设计 (8)2.1 苹果果实分布及采摘机理 (8)2.1. 1 果实分布 (8)2.1. 2 采摘机理及要求 (8)2.2 当前采摘情况 (8)2.3 设计总体构思 (9)2.4设计方案 (11)2.4.1操作杆 (14)2.4.2 夹持式采摘机构设计 (15)2.4.3 分拣结构 (16)2.5收集袋 (17)2.6试验分析 (18)第三章结论 (20)致谢...................................................................................... 错误!未定义书签。
参考文献.. (21)第一章绪论1.1引言中国是世界上最大的水果生产国和世界上最大的水果消费国。
占全球产量约1 4% 的水果种植行业的快速发展, 增加了市场对果园机械的需求。
苹果采摘机械的设计与改进研究一、背景介绍苹果作为一种重要的水果,在全球范围内都有着广泛的市场。
然而,苹果采摘是一项费时费力的任务,需要大量的人工投入。
为了提高采摘效率,减轻果农的负担,苹果采摘机械应运而生。
然而,现有的苹果采摘机械还存在一些问题,如采摘效率低、果实损伤率高、适用性差等。
因此,对苹果采摘机械的设计与改进研究具有重要意义。
二、设计方法1. 总体设计:苹果采摘机械应具有自动导航、精准定位、轻便灵活等特点。
采用机械臂或机械夹具进行苹果采摘,同时配备摄像头和传感器,实现精准定位和导航。
2. 机械臂设计:机械臂应具备伸缩自如、抓取力度适中、防滑效果好等特点。
采用高强度材料制造,如铝合金或不锈钢,以保证机械臂的强度和耐用性。
3. 传感器和摄像头:为了实现精准定位和导航,需要配备不同类型的传感器和摄像头。
如红外传感器用于感知障碍物,超声波传感器用于测量距离,摄像头用于观察苹果的位置和外观。
4. 控制系统:控制系统是苹果采摘机械的核心,应具备自动识别、决策、执行等功能。
采用嵌入式系统或计算机控制系统,可以实现智能化采摘。
三、改进策略1. 提高采摘效率:通过优化机械臂的抓取力度和速度,以及增加机械臂的数量和自动化程度,可以提高采摘效率。
2. 降低果实损伤率:通过改进机械臂的形状和材质,以及优化传感器和摄像头的性能,可以降低果实损伤率。
同时,加强机械臂的防滑效果,避免因抓握力度过大或过小导致果实损伤。
3. 增强适用性:针对不同品种和不同生长状态的苹果,可以通过调整机械臂的长度、形状和夹具的力度,以及优化导航算法,增强苹果采摘机械的适用性。
四、实验验证为了验证改进后的苹果采摘机械的性能,可以进行一系列的实验验证。
可以与果农合作,在实际果园中进行测试。
通过对比改进前后的采摘效率、果实损伤率等指标,评估改进效果。
五、未来发展随着人工智能和物联网技术的发展,苹果采摘机械有望进一步发展。
未来可以考虑引入更先进的传感器技术和人工智能算法,实现更精准的定位和导航,进一步提高采摘效率和质量。
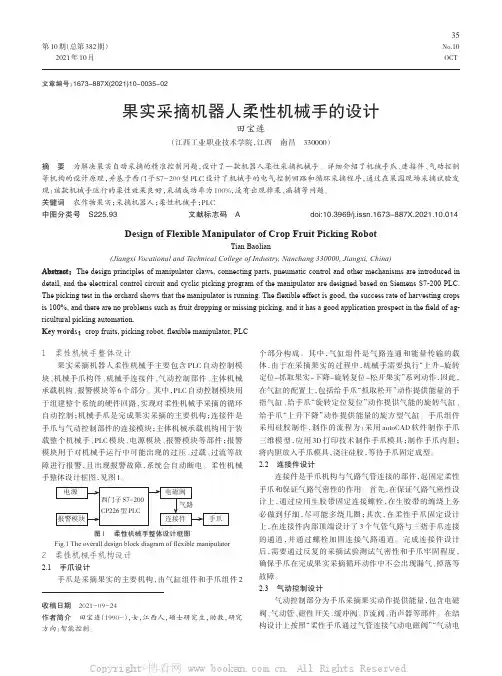
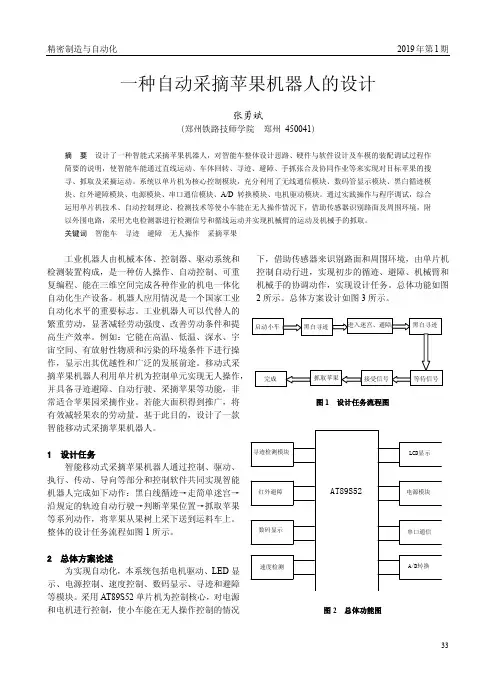
第10期(总第382期)2021年10月No.10 OCT文章编号:1673-887X(2021)10-0035-02果实采摘机器人柔性机械手的设计田宝连(江西工业职业技术学院,江西南昌330000)摘要为解决果实自动采摘的精准控制问题,设计了一款机器人柔性采摘机械手。
详细介绍了机械手爪、连接件、气动控制等机构的设计原理,并基于西门子S7-200型PLC设计了机械手的电气控制回路和循环采摘程序,通过在果园现场采摘试验发现:该款机械手运行的柔性效果良好,采摘成功率为100%,没有出现掉果、漏摘等问题。
关键词农作物果实;采摘机器人;柔性机械手;PLC中图分类号S225.93文献标志码A doi:10.3969/j.issn.1673-887X.2021.10.014Design of Flexible Manipulator of Crop Fruit Picking RobotTian Baolian(Jiangxi Vocational and Technical College of Industry,Nanchang330000,Jiangxi,China)Abstract:The design principles of manipulator claws,connecting parts,pneumatic control and other mechanisms are introduced in detail,and the electrical control circuit and cyclic picking program of the manipulator are designed based on Siemens S7-200PLC. The picking test in the orchard shows that the manipulator is running.The flexible effect is good,the success rate of harvesting crops is100%,and there are no problems such as fruit dropping or missing picking,and it has a good application prospect in the field of ag‐ricultural picking automation.Key words:crop fruits,picking robot,flexible manipulator,PLC1柔性机械手整体设计果实采摘机器人柔性机械手主要包含PLC自动控制模块、机械手爪构件、机械手连接件、气动控制部件、主体机械承载机构、报警模块等6个部分。

苹果采摘机器人的设计理念随着科技的不断发展,人们对于机器人在农业领域的应用也越来越感兴趣。
特别是在水果采摘这一繁重而又劳动密集的工作中,机器人的应用可以大大提高工作效率,减轻人工劳动的压力。
而苹果采摘机器人的设计理念更是备受关注,因为苹果的采摘工作需要精准的操作和柔和的手感,这对机器人的设计提出了更高的要求。
首先,苹果采摘机器人的设计理念需要考虑到苹果树的生长环境和特点。
苹果树通常生长在树冠较高的地方,因此机器人需要具备良好的爬树能力和稳固的平衡性。
同时,苹果的采摘需要轻柔的手感,以免损伤果实和树木。
因此,机器人的设计需要考虑到这些特点,确保机器人能够准确地采摘苹果,同时不会对果实和树木造成损害。
其次,苹果采摘机器人的设计理念还需要考虑到机器人的智能化和自主性。
机器人需要具备智能感知和识别能力,能够准确地识别成熟的苹果,并且能够根据果实的位置和树木的情况做出相应的动作。
同时,机器人还需要具备自主导航和路径规划能力,能够在果园中自由行走,并且能够避开障碍物和其他机器人,确保采摘工作的顺利进行。
最后,苹果采摘机器人的设计理念还需要考虑到机器人的可持续性和环保性。
机器人需要具备高效的能源利用和环保的设计理念,以减少对环境的影响。
同时,机器人的材料和零部件也需要考虑到可回收利用和再利用的可能性,以降低机器人的生产和运营成本,同时减少对资源的消耗。
总的来说,苹果采摘机器人的设计理念需要考虑到苹果树的生长环境和特点,机器人的智能化和自主性,以及机器人的可持续性和环保性。
只有在这些方面都得到充分考虑和实现的情况下,苹果采摘机器人才能真正发挥其作用,提高苹果采摘的效率,减轻人工劳动的压力,同时保护环境,实现可持续发展。
苹果采摘机器人的设计理念随着科技的不断发展,人们对于农业生产方式的要求也越来越高。
传统的农业生产方式已经无法满足现代社会对高效、智能化的需求。
因此,设计一款能够自动采摘苹果的机器人成为了农业科技领域的热门话题。
苹果采摘机器人的设计理念需要考虑多方面的因素,包括机器人的外观设计、采摘方式、智能控制系统等。
首先,机器人的外观设计需要考虑到在果园中的移动和操作,因此需要具备轻巧灵活的特点,同时还要考虑到机器人在不同地形和气候条件下的适应性。
其次,采摘方式需要结合机器人的机械臂和视觉识别技术,能够准确地识别成熟的苹果并进行精准的采摘。
最后,智能控制系统需要具备自主导航、避障和智能调度等功能,能够实现多台机器人的协同作业,提高采摘效率。
在设计苹果采摘机器人时,还需要考虑到对环境的保护和对果园的影响。
机器人的设计理念需要兼顾到节能减排和对果树的保护,避免对果园环境造成污染和破坏。
同时,机器人的作业过程也需要考虑到对果树的影响,尽量减少对果实和果树的损伤,确保采摘的果实质量和产量。
除了技术方面的考量,设计苹果采摘机器人还需要考虑到人机协作的问题。
机器人的设计理念需要结合人机交互界面,使操作人员能够方便地控制机器人的作业,并及时对机器人进行监控和维护。
同时,也需要考虑到机器人在果园中与其他工作人员和机械设备的协同作业,确保整个果园生产的高效运转。
总的来说,苹果采摘机器人的设计理念需要兼顾到技术、环境和人机协作等多方面的因素。
只有在考虑到这些因素的基础上,才能够设计出一款真正符合现代农业生产需求的智能化机器人,为果农提供更好的生产工具,提高果园的生产效率和果实的品质。
苹果采摘机器人的设计理念
随着科技的不断发展,机器人已经逐渐成为人们生活中不可或缺的一部分。
在
农业领域,机器人的应用也越来越广泛,其中包括苹果采摘机器人。
苹果是一种重要的水果,但是传统的采摘方式需要大量的人力和时间,因此设计一款高效的苹果采摘机器人成为了农业科技领域的一个重要课题。
苹果采摘机器人的设计理念需要考虑到多个方面,首先是机器人的外形和结构。
由于苹果树的树冠较高,机器人需要具备较高的抓取范围和稳定性,因此机器人的身材需要相对修长,并且具备良好的平衡性。
其次是机器人的感知和定位能力,苹果树的树叶和果实密集,机器人需要具备优秀的视觉和定位系统,能够准确地识别并定位苹果的位置。
同时,机器人需要具备自主导航和路径规划的能力,能够在果园中自由移动并采摘果实。
除此之外,苹果采摘机器人的设计理念还需要考虑到机器人的采摘方式和采摘
效率。
机器人需要具备柔和的抓取技术,能够轻柔地采摘苹果而不会对果实造成损伤。
同时,机器人的采摘效率也需要得到重视,能够在短时间内完成大量苹果的采摘工作。
在苹果采摘机器人的设计理念中,还需要考虑到机器人的智能化和自动化程度。
机器人需要具备自主学习和优化的能力,能够根据不同的果园环境和果实特征进行智能调整和优化。
同时,机器人还需要具备自动化的工作流程,能够在无人操作的情况下完成苹果采摘工作。
总的来说,苹果采摘机器人的设计理念需要综合考虑外形结构、感知定位、采
摘方式、采摘效率、智能化和自动化等多个方面,以实现高效、精准、智能的苹果采摘工作。
随着科技的不断进步,相信未来会有更多更先进的苹果采摘机器人问世,为农业生产带来更多的便利和效益。
全自动果实采摘机器人的设计研究摘要:以自然果园环境中机器人采摘成熟果实为原型,综合运用嵌入式系统、移动机器人自主导航定位、视觉识别、传感器与控制器等技术,依托智能无人车、机械夹爪、双目摄像头、激光雷达、深度摄像头、惯导系统等设备实现果蔬的无人化采摘。
关键词:智慧农业;智能制造;全自动果实采摘;智能机器人;视觉控制(本文由省级大学生创新创业训练项目(项目编号:S202310452140)以及校级教学改革项目(项目编号:JG2022M39)支持。
)一、前言随着社会经济的日益发展,城市规模越来越大,而由于城市的聚集效应,越来越多的年轻人向城市迁移发展,留在农村的人口愈来愈少,人口趋势老龄化严重,同时,由于机械化、自动化农田普及率低,农田单位亩产成本高但收益却非常低,农村经济发展缓慢,农民能获得的利益不高,愈来愈多的人不再愿意当农民、做农活。
但是,农业不能没有人来干,不能停止。
那么此时,我们就需要加强农业自动化、智能化发展,为此,我们小组通过努力,设计出一款与农业采摘相关的自动化智能化的全自动果实采摘机器人,用于提高大棚、室内等场地较为良好,农作物较为集中的场地的果实采摘效率、节省人力、降低单位面积采摘成本。
二、国内研究现状在模型算法上国内天津理工大学的乔艳军基于视觉学习和双目视觉技术对果实采摘机器人对于果实的识别和定位等做出了改善,使果实采摘机器人可以全天候多种光源的工作环境下对不同种类的水果进行识别、定位、采后分级等工作,基础原理是基于YOLOv3的果实识别方法[1],经过采集和训练之后的模型可以做到高达99.7%的精准识别率[2],且与GoogleNet、MobileNet等国外先进模型相比具有优异的分类精度、良好的实时性等优点[3]。
在机械手臂方面吉林大学的王傲雪对番茄的无损采摘进行了研究,以“丹东409”花生番茄为研究对象,测量了平均重量、果实平均宽度、球度、果皮与硅胶、橡胶材料之间的静摩擦系数等参数;利用TA.XTC+TA.Touch进行压缩试验得到所需要的各种参数并根据仿生学原理制作了样机,通过实验得到抓手材料使用硅胶为更加合适的结果,通过对大小果实的抓取获取数据,成功率分别为86%和81%,并且对不同成熟程度的果实的抓取几乎都没有损伤[4]。
苹果采摘机器人的设计理念随着科技的不断发展,人工智能和机器人技术已经逐渐渗透到了各个领域。
在农业领域,苹果采摘机器人的设计理念也逐渐引起了人们的关注。
苹果采摘一直是一个需要大量人工劳动的工作,而且由于采摘过程中需要小心翼翼地处理苹果,传统的采摘方式往往效率低下,成本高昂。
因此,设计一台能够自动采摘苹果的机器人成为了农业科技领域的热点之一。
苹果采摘机器人的设计理念首先需要考虑的是机器人的机械结构和动力系统。
机器人需要具备足够的力量和灵活性,能够在果园中自由移动,并且能够准确地识别和采摘成熟的苹果。
因此,机器人的设计需要结合先进的机械设计和传感器技术,以及高效的能源系统,来确保机器人能够长时间工作并且保持高效率。
其次,苹果采摘机器人的设计理念还需要考虑机器人的智能控制系统。
机器人需要能够自主地在果园中进行导航和定位,并且能够根据果树的生长情况和苹果的成熟度来进行采摘。
因此,机器人的智能控制系统需要结合先进的图像识别和人工智能技术,能够快速准确地识别果实并且进行精准的采摘动作。
此外,苹果采摘机器人的设计理念还需要考虑机器人与人类的协作和安全性。
机器人需要能够与果农和其他工作人员进行良好的协作,能够在果园中安全地工作,并且能够避免对果树和果实造成损坏。
因此,机器人的设计需要考虑到人机交互界面和安全感知系统,以及对机器人的自主性和远程监控能力。
总的来说,苹果采摘机器人的设计理念需要结合先进的机械设计、智能控制和人机协作技术,来实现机器人在果园中高效、安全地进行苹果采摘的目标。
随着科技的不断进步,相信这样的机器人很快就能够成为现实,为果农带来更高效、更便捷的采摘体验。
基于自动化的苹果采摘机器人标题:基于自动化的苹果采摘机器人引言概述:随着科技的不断发展,自动化技术在农业领域的应用越来越广泛。
苹果是一种重要的水果作物,传统的采摘方式需要大量的人力成本,效率低下。
因此,基于自动化的苹果采摘机器人应运而生,可以提高采摘效率,减少人力成本,提高农业生产的效益。
一、机器人的设计与结构1.1 机器人的外观设计:苹果采摘机器人通常采用轮式移动,具有机械臂和传感器等设备。
1.2 机器人的结构设计:机器人的结构设计应考虑稳定性、灵活性和适应性,以适应不同种类的苹果树。
1.3 机器人的操作系统:机器人应配备先进的操作系统,能够实现自主导航、智能采摘和数据分析等功能。
二、机器人的采摘技术2.1 机器人的视觉识别技术:通过摄像头等设备,机器人可以实现对苹果的识别和定位。
2.2 机器人的机械臂技术:机器人的机械臂应具备精准的抓取和摘取能力,以确保采摘的准确性和速度。
2.3 机器人的智能控制技术:机器人应具备智能控制技术,能够根据不同的情况自动调整采摘策略,提高采摘效率。
三、机器人的安全性和稳定性3.1 安全传感器:机器人应配备安全传感器,能够及时检测周围环境,避免碰撞和伤害。
3.2 系统稳定性:机器人的操作系统应具备稳定性,能够长时间稳定运行,不易出现故障。
3.3 紧急停止装置:机器人应配备紧急停止装置,一旦发生意外情况,能够及时停止操作,保障人员安全。
四、机器人的数据分析和管理4.1 数据采集:机器人应具备数据采集功能,能够实时监测采摘情况和果园环境。
4.2 数据分析:机器人应具备数据分析功能,能够分析采摘效率、果实质量等数据,为农民提供决策支持。
4.3 数据管理:机器人应具备数据管理功能,能够将采集的数据进行存储和管理,方便后续分析和应用。
五、机器人的未来发展趋势5.1 智能化发展:未来的苹果采摘机器人将更加智能化,能够实现自主学习和自主决策。
5.2 多功能化发展:未来的机器人将具备更多功能,如喷洒农药、施肥等,实现一体化农业生产。
摘要摘果机技术毫无疑问是未来的战略性高技术,充满机遇和挑战。
目前,国际上摘果机市场大概有80亿至100亿,其中工业摘果机占的比重最大。
2025年,整个摘果机市场将达到500亿,服务摘果机从原来的300多万台增加到1200多万台,特种摘果机(如:农业摘果机、排爆摘果机、医疗摘果机等)的呼声也越来越高。
另外,微软等IT企业,丰田、奔驰等汽车公司,甚至还有家具、卫生洁具企业都纷纷参与摘果机的研制。
本课题来源农业相关摘果机——摘果机。
随着摘果机技术的发展国内外开始探索相关技及先进成果应用在农业领域,其中果实采摘收割摘果机是农业领域中相对大的比重,相关摘果机随着技术进步及相关经验的成熟会为人们解放劳动力、提高工作效率等方面有不可估量的前景。
本文运用大学所学知识,设计了一款轮式摘果机,本摘果机通过轮式底部结构可自由行进并用5轴式机械臂结构可有效采摘果树上的苹果。
为进一步探索苹果采摘相关摘果机的研发提供了相关经验及依据,并对进一步论证相关技术有了实验的摘果机。
关键字:摘果机、农业,苹果采摘,轮式摘果机IRobotics is undoubtedly a strategic high-tech future, full of opportunities and challenges. Currently, the international market, there are about robot 8 to 10 billion, which accounts for the largest proportion of industrial robots. 2025, the entire robot market will reach 50 billion, the service robot from the original more than 300 million units to 12 million units,Special robot (eg: agricultural robots, EOD robots, medical robots, etc.) are increasingly vocal. In addition, Microsoft and other IT companies, Toyota, Mercedes-Benz and other car companies, and even furniture, sanitary ware enterprises have involved in the development of the robot.The sources of agriculture-related topics robot - apple picking robots. With the development of robot technology at home and abroad began to explore the application of relevant technologies and advanced achievements in the field of agriculture, where the fruit harvest picking robot is agriculture relatively large proportion of the relevant robot as technology advances and experience of mature people will liberate labor force improve work efficiency and so have immeasurable prospects.In this paper, the university is knowledge, designed a wheeled robot apple picking, apple picking this wheeled robots can travel freely and bottom structure with a 5-axis robot arm structure can effectively picking apples fruit trees. To further explore the development of apple picking robot provides relevant and in accordance with relevant experience, and further related technology demonstration experiments with robots.Key words: Robot,Agriculture,Apple picking ,Wheeled robot摘要 (I)Abstract (II)1 引言 (1)1.1课题的来源与研究的目的和意义 (1)1.2摘果机的用途 (2)1.3采摘果机的特点 (2)1.4本课题研究的内容 (3)1.5 UG设计基础 (4)2 摘果机的创新设计 (6)2.1摘果机的总体方案图 (8)2.2摘果机的工作原理 (10)3 摘果机部分零部件选型及校核 (12)2.3.1部分电机计算 (14)2.3.2联轴器的选型 (16)2.3.3轴承的选型计算 (18)4 摘果机的三维建模 (19)4.1总体结构三维建模 (20)4.2底部轮式车三维建模 (20)4.3电动气缸的三维建模 (21)结论 (22)致谢 (23)参考文献 (24)1引言1.1课题的来源与研究的目的和意义摘果机与智能装备产业是高度集成微电子、通信、计算机、人工智能、控制和图像处理等学科最新科研和产业成果的前沿高新技术产业,是拟建的江苏省(常州)工业技术研究院的服务的产业核心和研发的产业立足点。
苹果采摘机器人的设计理念
随着科技的不断发展,人工智能和机器人技术的应用已经渗透到各个行业,农业领域也不例外。
苹果采摘机器人的设计理念,旨在提高采摘效率、减少劳动力成本,并且保证采摘果实的质量和数量。
首先,苹果采摘机器人的设计理念要充分考虑果园的环境和果树的生长情况。
机器人需要具备自主导航和避障能力,能够在果园中自由移动,并且能够适应不同的地形和气候条件。
此外,机器人还需要具备对果树的识别和定位能力,能够准确地找到成熟的苹果,并且进行精准的采摘操作。
其次,苹果采摘机器人的设计理念还要考虑到采摘果实的方式和保护果树的需求。
机器人需要采用柔性的机械手臂或者吸盘等装置,能够轻柔地采摘果实,不会对果树造成伤害。
同时,机器人还需要具备对果实成熟度和质量的检测能力,能够及时识别出有病虫害或者损伤的果实,并进行分类处理。
最后,苹果采摘机器人的设计理念还要考虑到数据的收集和分析。
机器人需要搭载传感器和摄像头等设备,能够实时监测果园的情况,并且将采摘的数据进行记录和分析。
通过数据分析,果农可以了解果园的生长情况和果实的产量,从而更好地进行管理和决策。
总的来说,苹果采摘机器人的设计理念是以提高采摘效率、减少劳动力成本、保证果实质量和数量为核心目标,通过科技的应用,为果农提供更便捷、高效的采摘解决方案,推动农业生产的现代化和智能化发展。
随着技术的不断进步,相信苹果采摘机器人将会在未来发挥越来越重要的作用。
智能水果采装运一体机设计与应用智能水果采装运一体机是一种新型的农业机械设备,主要用于农场和果园内水果的采摘、装箱和运输。
该机器可以自主行走,利用机械臂技术完成水果的摘取。
智能水果采装运一体机减轻了传统采摘的人工劳动强度,提高了采摘效率和采摘质量,也减少了人工采摘对果实的伤害,对于水果产业发展具有重要意义。
该机器具有多项优点,首先是采摘效率高。
该机器每小时有效采摘数量可达3000-5000个,比传统采摘要快得多,提高了采摘效率,降低了采摘成本。
其次,它可以去除采摘过程中的人为因素。
在传统采摘中,由于人为的主观性和误差,采摘质量不稳定。
而智能水果采装运一体机可以精确控制机械臂的摆动,可以摘取到最优质的果实,提高了采摘质量。
此外,该机器工作效率高,不会感到疲劳,可以进行24小时连续作业。
最重要的是,它可以减少对劳动力的需求,减轻了人工劳动强度。
智能水果采装运一体机的设计要点包括机器体系结构设计、运动控制系统设计、视觉测量系统设计和机器人掌握技能的设计等。
机械结构方面,一体机的设计应考虑机体结构合理性、机体重心合理性和机体承载能力等因素。
运动控制系统的设计应考虑主控制器、动力控制器和传感器的集成。
视觉测量系统设计应考虑机器视觉探测技术和空间拍摄技术,精确获取水果的种类、大小和成熟度等信息。
最后,机器掌握技术的设计应包括机器臂的熟练掌握、水果的识别和位置掌握等技术。
智能水果采装运一体机的应用前景非常广阔。
首先,它可以改善现有的人力资源短缺问题。
由于现代技术的发展,传统的农业劳动力逐渐减少,使用智能水果采装运一体机大大缓解了人力资源短缺问题。
其次,该机器可以大大提高采摘效率和提高水果的质量,使得水果的产量和标准化水平大大提高。
最后,使用这种机器可以降低采摘成本。
智能水果采装运一体机可以取代一部分人工,并优化农业产业链,有效提高了农业产业效率和盈利能力。
总之,智能水果采装运一体机是现代农业发展的新时代的产物,对于推进现代农业、缓解人力资源短缺、提高产量和降低成本等问题具有重要意义。
苹果采摘机械设计发布时间:2022-11-30T06:31:03.918Z 来源:《城镇建设》2022年14期7月作者:罗婷[导读] 随着经济的发展和社会的发展,罗婷51102519930503****摘要随着经济的发展和社会的发展,人民的物质生活质量和对健康的要求也随之提升,以水果为主要的健康食物已经成为当前我国食物的主要组成部分。
近年来,果树的发展逐渐成了很多农户的第二个主要的选择,因此,我国的果树面积和各种品种的果实数量都出现了明显的增加,因此,果树生产也逐渐繁荣起来。
特别是1978年以来,随着中国农村经济的快速发展,中国的果品生产从一九九七年跃居全球首位。
而苹果的发展也让人欢欣鼓舞,在2012,苹果种植的土地面积达23万亩,年产苹果380万吨,占据了世界上一半的苹果,几乎占据了世界上苹果的一半,也就意味着中国将会是世界上最大的苹果生产、出口和消费市场。
目前,中国的苹果生产区域分布在渤海地区,黄土高原地区,黄河古道地区,西南冷凉高原地区。
关键词:苹果,手持式,机械手,电机驱动,强度校核第一章采摘机械手采摘器的设计1.1 采摘电机的选择1.1.1 电机类型的选择电动机的传动方式有两种,一种是步进电动机,另一种是电动机,它们的工作原理是:一种是由 RV减速装置来控制转速,再由 RV减速装置来控制转动速度,从而带动半球式捕捉器的开闭。
步进马达与伺服马达的各项性能指标比较,见下表.第二章总结目前国内苹果产业的采收工作以手工为主,其采收效率曲线会随著时间的流逝而降低,但随着现代化的快速发展,人力的消耗也越来越大,剩余的工作也越来越少,所以研究开发采收机器是当务之急。
参考文献[1]孙浩. 六自由度苹果采摘机械臂路径规划与仿真分析[J]. 南方农机,2021,52(23):47-50.[2]祝前峰,陆荣鉴,李奉顺. 苹果采摘机械的研究现状与发展趋势[J]. 林业机械与木工设备,2021,49(05):4-9+15.[3]朱容芳,朱煜华. 基于UG的苹果采摘机械臂与末端执行器的结构设计[J]. 农机使用与维修,2021,(04):21-22.[4]胡天棋,黄圳兵,孙小芳,吴啸天,周创. 一种苹果辅助采摘装置的设计[J]. 农业技术与装备,2020,(10):17-18.[5]郑嫦娥,高坡,GAN Hao,田野,赵燕东. 基于分布迁移策略的苹果采摘机械臂轨迹规划方法[J]. 农业机械学报,2020,51(12):15-23.。
毕业设计(论文)苹果采摘机械设计Design of apple picking machine学生姓名彭靖文学生专业机械电子工程3班学生年级14级指导教师李永阳广东科技学院教务处制目录摘要 (2)Abstract (3)1绪论 (5)1.1课题研究背景及来源 (5)1.2 国内外研究进展 (6)1.2.1 国外研究进展 (7)1.2.2 国内研究进展 (11)1.3 研究内容及意义 (13)2机构的总体方案设计 (15)2.1 机构工作的基本原理 (15)3机构的机械结构设计 (18)3.1 机构的剪夹器传动类型选择 (18)3.2 机构的剪夹器设计 (18)3.2.1剪夹器工作过程分析 (18)3.2.2剪夹器原理设计 (19)3.2.3曲柄摇杆的设计 (20)3.2,4原位置返回设计 (21)3.3 机构的手机连接无线摄像头 (23)3.4机构的电机选择 (25)3.4.1负载电机选型 (25)3.5 机构的开关设计 (26)4结论和展望 (28)4.1结论 (28)4.2主要创新点 (28)参考文献 (29)致谢 (30)摘要鲜果和加工制品是苹果消费市场的主要产品,鲜果的比例目前高达百分之九十,而加工制品仅仅占百分之十左右,为了保证苹果的品质,我国就苹果产业来说目前的重中之重是适时采摘。
采摘工作的日益繁重与劳动力的极度缺乏使得适时采摘现在变得越来越难,而现在苹果采摘是苹果生产中耗时费力的环节之一,需投入非常多的劳动力,我国农业目前无论是机械化还是智能化水平都较低,所以就目前而言,研制一款简单经济的、可以提高采摘效率的机构就显得尤为重要,是具有很重要的战略意义的。
本课题旨在设计一款简单、方便、经济的苹果采摘机构,主要研究的内容包括以下几个方面:(1)首先运用人机工程学的所学内容来设计适合成年人使用机构的尺寸以及机构零部件的选型。
(2)本设计运用了步进电机实现半自动化的控制升降以及控制采摘的工作,涉及材料力学以及机械原理的所学内容,后续会有验证。
苹果采摘机械人结构设计水果采摘费用高且劳动量大,为了快速且准确完成苹果采摘任务,需要进行水果采摘机械人结构设计。
首先进行采摘机械机构选型,确定合适自由度;其次,依据典型果树轮廓确定采摘臂结构尺寸,绘制采摘机械手臂零件图和装配图;最后,搭建采摘机械人结构试验台,进行实体运动和抓取实验对设计效果进行验证。
试验结果表明,该设计方案基本能够达到预期。
该设计方法,对农业领域其他类型采摘机械手设计有一定参考价值。
标签:采摘机械手臂;苹果;结构设计引言水果采摘季节性强、费用高且劳动量大[1]。
加速农业现代化进程,实施“精确”农业,广泛应用农业机器人,提高资源利用率和农业产出率,降低劳动强度,提高经济效率将是现代农业发展的必然趋势。
研究采摘机械人,对于降低人工劳动强度和采摘成本、保证水果适时采收,具有重大的意义[2]。
我国从上世纪70年代开始研究水果蔬菜类的采摘机械,并且也逐渐起步,如上海交通大学已经开始了对黄瓜采摘机器人的研制[3],浙江大学对番茄采摘机器人进行了结构分析与设计的优化[4],中国农业大学对采摘机器人的视觉识别装置进行了研究[5]。
目前,我国研究的采摘机器人还有西红柿、橘子、草莓、荔枝和葡萄采摘机器人等[6-8]。
文章对苹果采摘机械手臂进行选型,进一步进行详细结构设计,最后对设计结果进行试验验证。
1 机械人机构选型及自由度的确定由于采摘机械人的作业对象是苹果,质量轻,体积小,故而可选择较为简单、灵活、紧凑的结构形式。
根据机械人手臂的动作形态,按坐标形式大致可将机械人手臂部分分为以下四类[9]:直角坐标型机械手;圆柱坐标型机械手;球坐标(极坐标)型机械手;多关节型机械手。
采摘机械臂的结构型式选取主要取决于机械人的活动范围、灵活性、重复定位精度、持重能力和控制难易等要求。
以上四种型式,它们的活动范围和灵活度逐渐增大。
经过对苹果采摘空间的研究,结果表明,苹果树树冠和底部的苹果分布极少,大多分布在树冠中部,大约有80%以上的苹果分布在距地面垂直高度1-2m、距树干左右方向1-2m的空间范围内,且阴阳两面的苹果分布率并无明显的差异。