简易型水果采摘机设计
- 格式:doc
- 大小:51.00 KB
- 文档页数:5
草莓采摘机毕业设计说明书(总21页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--毕业设计说明书题目:草莓采摘机设计专业:机械设计制造及其自动化学号:姓名:指导教师:完成日期:目录摘要 (1)Abstract (2)第一章绪论 (3). 引言 (3). 草莓采摘机国内外研究现状 (3)国外研究现状 (3)国内研究现状 (4). 研究的目标和内容 (5)研究目标 (5)采摘机采摘原理简介 (5)第二章草莓采摘机总体方案设计 (7). 草莓采摘机结构设计及其计算 (7). 草莓采摘机设计及其材料选择 (8)第三章采摘装置的设计 (9). 采摘挡板的设计 (9). 弹簧的设计 (9). 滚轮的设计 (11)第四章电动机的选择 (12). 传动比的分配 (13)第五章 V带传动的设计 (15). V带参数计算 (15)第六章齿轮的设计 (17). 齿轮相关参数初步确定 (17). 按齿面接触强度设计 (17). 按齿根弯曲疲劳强度设计 (19). 几何尺寸的计算 (20)第七章轴的设计 (22). 轴的材料 (22). 轴的参数设计 (22). 轴承的强度校核 (27)第八章传送装置的设计 (29). 传送带的宽度设计 (29). 传送带的选型 (29). 滚筒的选择 (29)结论 (31)参考文献 (32)致谢 (33)附录 (34)草莓采摘机设计摘要:现在国内的农业采摘虽然对于大部分水果都有专业的采摘设备,但是对于草莓采摘还是一大难点,所设计的采摘设备针对特殊地形和栽种方式还有保持果实的完整度都有一定的难度。
本设计对现阶段我国草莓种植环境进行相关了解,再结合实际采摘情况,针对草莓采摘需要注意的一些细节进行分析,设计出合理的采摘机构,实现对草莓的大批量采摘。
所设计的草莓采摘机以人力推动或机器牵引,通过拖拽,实现了草莓采摘机的行驶功能。
针对不同草莓田垄形状,采摘装置加入了收紧滚轮的结构,以便适应多变的地形。

苹果采摘机器人设计与研究苹果采摘机器人设计与研究概述:水果采摘一直是农业中较为繁琐且费时费力的任务之一,尤其是针对树果类水果,如苹果。
为了解决这一问题,科学家们设计了一种苹果采摘机器人,能够在无人作业的情况下完成苹果的采摘工作。
本文将介绍苹果采摘机器人的设计和研究进展,并讨论其在未来农业中的应用前景。
设计与结构:苹果采摘机器人基于机器视觉、机械臂技术和智能控制等技术原理。
其结构主要由机器臂、图像传感器、处理单元和执行器等组成。
机械臂是该机器人的核心部件,通过多关节的连接,模仿人类的手臂运动。
这使得机械臂能够在树冠内进行精确定位和抓取动作。
机械臂的设计要求同时具备轻巧和稳定的特点,以便在树冠内灵活操作。
图像传感器采用先进的机器视觉技术,能够感知和识别苹果的大小、颜色和成熟度等信息。
通过图像传感器,机器人能够准确定位并识别相应位置的苹果,从而进行采摘动作。
处理单元是机器人的大脑,具备强大的算法处理能力。
它能够接收和处理图像传感器采集的数据,并根据预设的算法和规则执行相应的动作。
处理单元的设计包含机器学习和深度学习等人工智能技术,能够根据不同的环境和条件进行自适应的判断和控制。
执行器是机械臂动作的驱动部件,它根据处理单元的指令实现机械臂的运动。
执行器通常通过电机和传动装置实现,可以提供精确的力和位置控制,以便在高度复杂的树冠环境下安全采摘苹果。
研究进展:苹果采摘机器人的研究已经取得了一些进展,但仍面临一些挑战。
一方面,机器视觉技术的发展,使得机器人更加准确地感知和识别苹果。
另一方面,机器学习和深度学习等人工智能技术的应用,使得机器人能够学习和不断改进其采摘能力。
然而,苹果采摘机器人面临的挑战也不少。
首先,复杂的果树环境对机器人的结构设计和运动控制提出了更高的要求。
机械臂需要足够轻巧和柔性,以适应不同形态的苹果树。
其次,苹果的外观和位置可能受到树叶、树枝和其他苹果的遮挡,在视觉感知和定位中存在困难。
此外,苹果的大小和成熟度不同,需要机器人具备辨识和采摘不同苹果的能力。
采摘机械手结构设计发布时间:2022-07-21T09:03:35.826Z 来源:《时代教育》2022年5期作者:孙伟[导读] 近年来,草莓成为重要的经济作物,在世界各地种植广泛,尤其是我国已经成为草莓最大的生产和出口国家,位居世界首位。
孙伟山东协和学院山东济南 250200摘要:近年来,草莓成为重要的经济作物,在世界各地种植广泛,尤其是我国已经成为草莓最大的生产和出口国家,位居世界首位。
草莓营养丰富,富含多种维生素,被人们成为“水果皇后”,深受广大消费者喜爱。
但是草莓属于劳动密集型产物,草莓的种植和采摘全部依靠人力完成,果农的经济成本高,制约果农的收入。
所以,随着农业种植采摘自动化的发展,实现草莓自动化采摘越来越有重要的意义。
本文设计的是一款可以实现草莓采摘的机械手,在草莓检测识别装置的辅助下,可以完成草莓的自动化采摘。
该设计将会提高草莓采摘的效率以及采摘果实的质量,同时又可以降低采摘过程所投入的劳动力,保证果实的及时采摘。
关键词:草莓;机械手;执行机构同国外相比,我国采摘机器人的研究起步较晚,但是近年来国家在农业领域投入大量财力物力,发展速度较快,众多院校及研究所均在进行农业机器人以及智能农机方面的研究,并取得了较多成果。
1)草莓选果机。
我国的一个农业的试验场研发了一款选果机。
该机器可以依据水果的成分含量以及果实的形状进行分类选择,并可以实现果实的封装,全程自动化作业,工作效率为每小时五千公斤左右。
南京的一所大学依据人眼视觉成像原理,对图片进行模块分割,进而实现果实的分离,使图像由二维变成三维,进而确定其空间坐标,最终实现果实的精确定位。
2)浙江的一所大学中的一个团队对采摘机械手进行了一系列的讨论,提出了一系列的评价指标,比如:灵活程度、作业空间、动作多样性、避障能力等。
3)中国农业大学针对成熟草莓果实的特点,利用其色彩模型中的特定信息通道,完成了对草莓的辨认。
而且还建立了桥驾式直角坐标机械手,在草莓采摘机械手视觉处理系统中,提出了全新的理论方法,依据草莓果实的颜色进行辨别处理,实现草莓的精确定位,提高其采摘的准确性、适应性。
一种新型水果采摘装置的设计摘要:设计了一种采用双履带配备三角形机构轮毂为主要行进部件,摒弃以往的仅履带行进和仅防滑轮胎行进方式的一种新型水果采摘装置,更便于适应不同地形的工作进行,在此基础上加装独特设计的底盘配合车基,防止因地形导致的打滑和磨损等。
采摘器在三爪机构的基础上利用四杆机构对其进行创新,采集部分添置软胶更好地抓取水果,并保证不会破坏表皮,保持其完整性;新型爪末端加装小型刀片,采用电动机带动新型爪进行张开和收紧及转动,刀片做辅助作用。
接收转移装置放置在新型爪前下方,主体为橡胶内置软质蓬松海绵,用作水果下降过程中的缓冲,下方对应存放模块,保证摘下的水果能顺利进入的接收装置,再顺着传递装置,安全的到达存放区,完成辅助采摘的运输过程。
车体加装摄像头,用于观测行进道路实况及对水果所在方位确定,图像采用蓝牙传输,便于户外工作。
整体采用单片机作为控制中心,直流电驱动电机进行移动和采摘的全过程,功耗小,便于运作。
关键词:新型水果采摘装置;摄像头;蓝牙传输;单片机引言水果采摘机械装置的研究和进一步完善对于跟进目前种植业需求具有重大意义,逐步趋于便捷、自动、智能化的采摘设备对于初步代替人工采摘、解放劳动力、提高采摘效率以满足人们生活需求等方面意义重大。
逐步解放人工劳作的智能型采摘机器人是未来新型农业机械的发展大方向,具有广阔的应用前景。
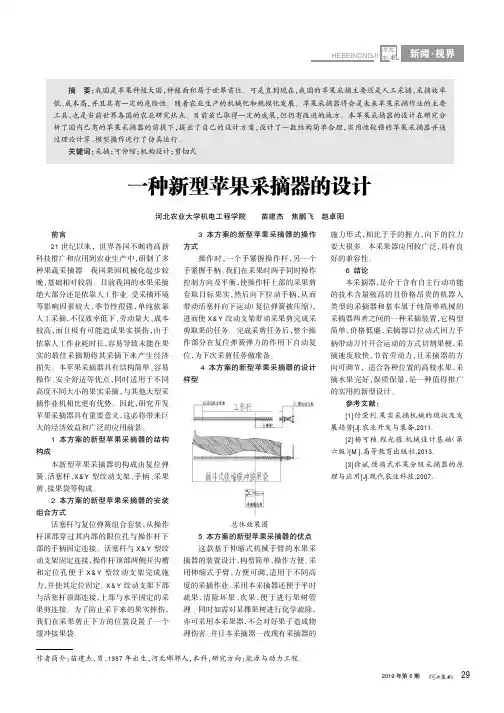
1系统设计设计出一种全地形水果采摘装置的样机模型,主要实现以下功能:(1)独特底盘设计承载行进机构,保证作业平稳进行;(2)采摘机构和收取转移机构保证水果在采摘中的完整性;(3)模块化的存放装置便于水果批量运输;(4)图像识别技术准确进行采摘识别;(5)行进机构双履带单独控制,采用直流电机驱动,可控制装置行进速度以及灵活调节车体方向。
图1 总体设计框图本设计包括行进装置、采摘装置、收取转移装置、存放装置以及车基,总体设计框图见上图1。
2创新点与项目特色2.1创新点全地形水果采摘装置的工作环境复杂,多为山地、丘陵、沟壑等非结构化地形,采用履带式对于出现的特殊地形能够正常越过,适用性较强。

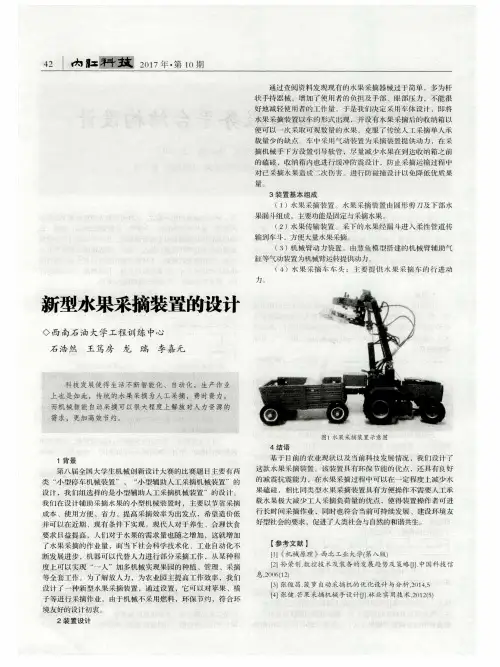
摘要在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业柑橘采摘机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。
工业柑橘采摘机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业柑橘采摘机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
本文将设计一台五自由度的工业柑橘采摘机器人,用于给采摘水果。
首先,本文将设计柑橘采摘机器人的底座、大臂、小臂和机械手的结构,然后选择合适的传动方式、驱动方式,搭建柑橘采摘机器人的结构平台;在此基础上,本文将设计该柑橘采摘机器人的控制系统,包括数据采集卡和伺服放大器的选择、反馈方式和反馈元件的选择、端子板电路的设计以及控制软件的设计,重点加强控制软件的可靠性和柑橘采摘机器人运行过程的安全性,最终实现的目标包括:关节的伺服控制和制动问题、实时监测柑橘采摘机器人的各个关节的运动情况、柑橘采摘机器人的示教编程和在线修改程序、设置参考点和回参考点。
关键词:柑橘采摘机器人,示教编程,伺服,制动ABSTRACTIn the modern large-scale manufacturing industry, enterprises pay more attention on the automation degree of the production process in order to enhance the production efficiency, and guarantee the product quality. As an important part of theautomation production line, industrial robots are gradually approved and adopted byenterprises. The technique level and the application degree of industrial robots reflect the national level of the industrial automation to some extent, currently, industrial robots mainly undertake the jops of welding, spraying, transporting and stowing etc. , which are usually done repeatedly and take high work strength, and most of these robots work in playback way.In this paper I will design an industrial robot with four DOFs, which is used to carry material for a punch. First I will design the structure of the base, the big arm, the small arm and the end manipulator of the robot, then choose proper drive method and transmission method, building the mechanical structure of the robot. On this foundation, I will design the control system of the robot, including choosing DAQ card, servo control, feedback method and designing electric circuit of the terminal card and control software. Great attention will be paid on the reliability of the control software and the robot safety during running. The aims to realize finally include: servocontrol and brake of the joint, monitoring the movement of each joint in realtime, playback programming and modifying the program online, setting reference point and returning to reference point.KEY WORDS: robot, playback, servocontrol, brake目录第1章绪论 (1)1.1 柑橘采摘机器人概述 (3)1.2 柑橘采摘机器人的历史、现状 (4)1.3 柑橘采摘机器人的发展趋势 (5)第2章柑橘采摘机器人机械手的设计 (5)2.1自由度及关节 (6)2.2 基座及连杆 (7)2.2.1 基座 (8)2.2.2 大臂 (9)2.2.3 小臂 (10)2.3 机械手的设计 (12)2.4 驱动方式 (13)2.5 传动方式 (14)2.6 制动器 (15)第3章控制系统硬件 (16)3.1 控制系统模式的选择 (17)3.2 控制系统的搭建 (18)3.2.1 工控机 (19)3.2.2 数据采集卡 (20)3.2.3 伺服放大器 (21)3.2.4 端子板 (22)3.2.5电位器及其标定 (22)3.2.6电源 (23)第4章控制系统软件 (24)4.1预期的功能 (25)4.2 实现方法 (26)4.2.1实时显示各个关节角及运动范围控制 (26)4.2.2直流电机的伺服控制 (27)4.2.3电机的自锁 (28)4.2.4示教编程及在线修改程序 (29)4.2.5设置参考点及回参考点 (30)第5章总结 (32)5.1 所完成的工作 (33)5.2 设计经验 (35)5.3 误差分析 (36)5.4 可以继续探索的方向 (38)致谢 (39)参考文献 (40)第1章绪论1.1 柑橘采摘机器人概述在现代工业中,生产过程的机械化、自动化已成为突出的主题。
球形水果采摘末端执行器设计与仿真设计和仿真球形水果采摘末端执行器包含以下步骤:1.需求分析首先,需要对球形水果采摘末端执行器的需求进行分析。
这包括了采摘水果的种类、形状和尺寸,采摘的高度和角度等等。
根据需求分析,确定采摘末端执行器的设计参数。
2.机械设计在机械设计中,需要考虑采摘末端执行器的结构和材料选择。
采摘末端执行器需要具备足够的强度和刚度,能够承受水果的重量和采摘过程中的冲击力。
同时,也需要考虑执行器的重量和尺寸,以便操控和安装。
3.执行器机构设计执行器机构设计是整个采摘末端执行器的关键部分。
针对球形水果的形状和采摘方式,可以设计一个可以自由旋转的夹持机构,以确保夹持水果的稳定性和安全性。
夹持机构需要具备足够的闭合力,以避免水果在采摘过程中滑落。
4.传动系统设计传动系统设计涉及到执行器的驱动方式和功率。
根据需求,可以选择电动驱动方式,并考虑到执行器对功率的需求。
通过选择适当的电机和传动装置,可以实现采摘末端执行器的精确控制和高效运行。
5.控制系统设计控制系统设计包括执行器的控制电路和程序编写。
控制电路可以实现执行器的开关和速度控制,以及对夹持力的调节。
程序编写可以实现采摘末端执行器的智能控制,可以自动识别水果的位置和状态,并根据需求进行采摘操作。
6.运动学分析和仿真通过运动学分析和仿真,可以验证采摘末端执行器的设计和功能。
可以使用软件工具进行仿真,模拟执行器的运动轨迹和夹持力,以及应对不同情况下的采摘操作。
通过仿真,可以找出潜在的问题并进行改进。
7.制造和测试最后,根据设计图纸和仿真结果,进行采摘末端执行器的制造和测试。
在制造过程中,需要确保材料的质量和加工的精度。
在测试过程中,可以对执行器进行负载试验和采摘试验,以评估其性能和稳定性。
综上所述,设计和仿真球形水果采摘末端执行器不仅需要进行机械设计和执行器机构设计,还需要考虑传动系统的选择和控制系统的设计。
通过运动学分析和仿真,可以验证设计的正确性,并进一步进行制造和测试。

摘果神器的制作方法
一、准备工具:
1、电钻机:用于钻孔;
2、锉刀:用于削减、削平果模的顶部;
3、收缩盘头螺丝刀:用于固定果模;
4、锉齿工具:用于在果模的表面刻切;
5、钳子:用于拆开、拧紧果皮;
6、锤子:用于敲打果皮;
7、削皮刀:用于削去果皮;
8、钳子:用于夹住果肉;
9、钳子:用于抓取果籽;
10、木棍:用于支撑果模;
11、抹布:用于清洁果模;
12、硅胶棒:用于粘装果模中的小件;
13、胶带:用于固定果模。
二、制作步骤:
1、将果模装入木棍中,用电钻机钻出一个8-10毫米的孔;
2、用锉刀削平果模的顶部,使其与木棍接触紧密;
3、用收缩盘头螺丝刀固定果模;
4、用锉齿工具在果模的表面刻切;
5、用钳子拆开果皮;
6、用钳子夹住果肉,用锤子敲打果皮,使它们容易剥离;
7、用削皮刀削去果皮,抓取果籽;
8、用硅胶棒粘装果模中的小件;
9、用抹布清洁果模,最后用胶带固定果模即可完成。
苹果采摘及分拣一体化机械设计曹亚楠1,2,刘达志1,金华明1,徐平平1,朱文艳1,段宝玉3(1.内蒙古科技大学机械工程学院,内蒙古 包头 014010;2.华北电力大学动力机械及工程学院,北京 102206;3.内蒙古科技大学分析测试中心;内蒙古 包头 014010)摘 要:为了减轻果农在采摘与分拣果实过程中的工作量,解决采摘过程机械化程度低的问题,针对中小型果园,在气压传动与机械结构的基础上,研制了一种针对高空水果(苹果为主)采摘及分拣一体化装置。
此装置由夹取机构、伸缩机构、动力输出装置和分拣装置四部分组成。
利用单作用气缸控制夹取机构实现摘水果,利用双作用气缸实现装置的伸缩,通过动力输出装置为气缸提供气源,利用分拣装置实现水果的分拣。
关键词:采摘;分拣;气缸;夹取;伸缩中图分类号:S225 文献标识码:A 文章编号:1673-2154(2019)05-0030-050 引言随着我国经济发展和人民生活水平的提高,水果市场需求持续扩大,因而对水果种植、采摘、供应等一系列环节提出更高要求。
其中,水果采摘大约占到整个产业工作量的50%,水果收获(采摘)成本大概占到水果总成本的35%~45%[1]。
目前我国大部分水果产区在水果采摘时依然以手工作业为主,机械化程度不高。
以苹果为例,在丘陵产区,适用机械少,而平原产区受果园规模、果农购买力等原因影响,机械化水平也较低,导致我国苹果优势产区的综合机械化水平不到20%,非优势产区的综合机械化水平不到10%[2]。
水果采摘的机械化程度低,制约了苹果产业的发展。
苹果采摘是一项季节性较强的工作,目前的采摘仍以人力为主,我国面临人口结构老龄化和农村劳动力不断减少的现状,这进一步制约了苹果产业的发展。
为解决当前的矛盾,急需研究开发适合生产实际的水果采摘机械,以此减轻劳动强度、提高生产效率 [3,4]。
本文旨在设计一种低成本的通用型苹果采摘机械,以适应市场需求,促进苹果产业的发展。
高空便携式山核桃拍打采摘机设计詹超;曹成茂;娄帅帅;丁冉;毕海军;李赞松【摘要】针对当前我国山核桃采摘过程作业难、机械化程度低及存在安全隐患的现状,设计研制了一款适用于复杂地形车辆无法进入的山高、坡陡的多功能高空便携式山核桃采摘设备。
为此,阐述了采摘机的总体结构设计方案,给出了采摘伸缩杆、采打机构等关键部件的设计过程,并利用 abaqus 软件对采摘杆进行有限元模态分析,获得了该系统的前6阶的固有频率及各阶振型图。
研究结果表明:系统的1~2阶(54.1~55.2 Hz)模态主要表现为采摘杆整体平动;3~6阶(107.3~184.3Hz)模态表现为采摘杆各部位沿各个方向的振颤及扭转振动,上述系统模态属性,可为系统结构振动特性的描述及整机作业性能的优化提供依据。
%In order to solve the problems of the operational, security and the poor mechanization of the walnut picking work, we developed a multifunctional walnut picking equipment which adapt to the mountain area that the trucks unable to enter. In this paper, we present the design scheme of the prototype for the machine, and give the design parameters for the key parts like telescopic rod and picking mechanism . The finite element modal analysis of the picking rod was de-veloped using the software ABAQUS, the modal figure and first 6 nature frequency of the model was achieved. The re-sults indicated that, the 1-2(54. 1-55. 2Hz) modal frequency mainly performance as overall vibration of the pick rod, 3-6(107. 3-184. 3Hz) modal frequency performance as vibration and torsional vibration of the pick rod parts though dif-ferent directions. The research would help todescribed the vibration characteristics of the system and could be referred by the similar study in order to improve the working performance.【期刊名称】《农机化研究》【年(卷),期】2017(039)010【总页数】5页(P119-123)【关键词】山核桃;采摘机;便携式;高空;模态分析【作者】詹超;曹成茂;娄帅帅;丁冉;毕海军;李赞松【作者单位】安徽农业大学工学院,合肥 230036;安徽农业大学工学院,合肥230036;安徽农业大学工学院,合肥 230036;安徽农业大学工学院,合肥230036;安徽农业大学工学院,合肥 230036;安徽农业大学工学院,合肥230036【正文语种】中文【中图分类】S225.93山核桃属于我国特有的经济树种,营养价值高,果仁中含有20多种矿物元素,以及对人体有重作用的钙、镁、磷和铁等微量元素[1-2],是一种健康美味、营养丰富的天然绿色食品。
自动水果采摘机器策划书3篇篇一《自动水果采摘机器策划书》一、项目背景随着人们生活水平的提高,对水果的需求也越来越大。
然而,传统的水果采摘方式主要依靠人工,不仅效率低下,而且劳动强度大,容易造成水果的损伤。
因此,开发一种自动水果采摘机器具有重要的现实意义。
二、项目目标本项目的目标是设计一种能够自动采摘水果的机器,提高水果采摘的效率和质量,降低劳动强度,减少水果的损伤。
三、项目内容1. 机器结构设计:设计一种适合水果采摘的机器结构,包括采摘机构、输送机构、控制系统等。
2. 采摘机构设计:设计一种能够快速、准确地采摘水果的采摘机构,采用机械手臂或其他采摘装置。
3. 输送机构设计:设计一种能够将采摘下来的水果快速、平稳地输送到指定位置的输送机构,采用输送带或其他输送装置。
4. 控制系统设计:设计一种能够实现机器自动化采摘的控制系统,包括传感器、控制器、执行器等。
5. 机器性能测试:对设计的自动水果采摘机器进行性能测试,包括采摘效率、采摘质量、劳动强度等方面的测试。
四、项目实施计划1. 第一阶段:完成机器结构设计和采摘机构设计。
2. 第二阶段:完成输送机构设计和控制系统设计。
3. 第三阶段:制造自动水果采摘机器样机,并进行性能测试。
4. 第四阶段:对自动水果采摘机器进行优化改进,提高机器的性能和可靠性。
5. 第五阶段:进行自动水果采摘机器的产业化推广。
五、项目预算本项目的预算主要包括机器结构设计、采摘机构设计、输送机构设计、控制系统设计、机器制造、性能测试等方面的费用,预计总投资为[X]万元。
六、项目风险评估本项目的风险主要包括技术风险、市场风险、管理风险等方面。
针对这些风险,我们将采取相应的措施,如加强技术研发、进行市场调研、建立完善的管理制度等,以降低项目风险。
七、项目效益分析本项目的实施将带来显著的经济效益和社会效益。
一方面,自动水果采摘机器的应用将提高水果采摘的效率和质量,降低劳动强度,减少水果的损伤,从而提高水果的产量和品质,增加果农的收入。
毕业设计(论文)苹果采摘机械设计Design of apple picking machine学生姓名彭靖文学生专业机械电子工程3班学生年级14级指导教师李永阳广东科技学院教务处制目录摘要 (2)Abstract (3)1绪论 (5)1.1课题研究背景及来源 (5)1.2 国内外研究进展 (6)1.2.1 国外研究进展 (7)1.2.2 国内研究进展 (11)1.3 研究内容及意义 (13)2机构的总体方案设计 (15)2.1 机构工作的基本原理 (15)3机构的机械结构设计 (18)3.1 机构的剪夹器传动类型选择 (18)3.2 机构的剪夹器设计 (18)3.2.1剪夹器工作过程分析 (18)3.2.2剪夹器原理设计 (19)3.2.3曲柄摇杆的设计 (20)3.2,4原位置返回设计 (21)3.3 机构的手机连接无线摄像头 (23)3.4机构的电机选择 (25)3.4.1负载电机选型 (25)3.5 机构的开关设计 (26)4结论和展望 (28)4.1结论 (28)4.2主要创新点 (28)参考文献 (29)致谢 (30)摘要鲜果和加工制品是苹果消费市场的主要产品,鲜果的比例目前高达百分之九十,而加工制品仅仅占百分之十左右,为了保证苹果的品质,我国就苹果产业来说目前的重中之重是适时采摘。
采摘工作的日益繁重与劳动力的极度缺乏使得适时采摘现在变得越来越难,而现在苹果采摘是苹果生产中耗时费力的环节之一,需投入非常多的劳动力,我国农业目前无论是机械化还是智能化水平都较低,所以就目前而言,研制一款简单经济的、可以提高采摘效率的机构就显得尤为重要,是具有很重要的战略意义的。
本课题旨在设计一款简单、方便、经济的苹果采摘机构,主要研究的内容包括以下几个方面:(1)首先运用人机工程学的所学内容来设计适合成年人使用机构的尺寸以及机构零部件的选型。
(2)本设计运用了步进电机实现半自动化的控制升降以及控制采摘的工作,涉及材料力学以及机械原理的所学内容,后续会有验证。
苹果采摘机械人结构设计水果采摘费用高且劳动量大,为了快速且准确完成苹果采摘任务,需要进行水果采摘机械人结构设计。
首先进行采摘机械机构选型,确定合适自由度;其次,依据典型果树轮廓确定采摘臂结构尺寸,绘制采摘机械手臂零件图和装配图;最后,搭建采摘机械人结构试验台,进行实体运动和抓取实验对设计效果进行验证。
试验结果表明,该设计方案基本能够达到预期。
该设计方法,对农业领域其他类型采摘机械手设计有一定参考价值。
标签:采摘机械手臂;苹果;结构设计引言水果采摘季节性强、费用高且劳动量大[1]。
加速农业现代化进程,实施“精确”农业,广泛应用农业机器人,提高资源利用率和农业产出率,降低劳动强度,提高经济效率将是现代农业发展的必然趋势。
研究采摘机械人,对于降低人工劳动强度和采摘成本、保证水果适时采收,具有重大的意义[2]。
我国从上世纪70年代开始研究水果蔬菜类的采摘机械,并且也逐渐起步,如上海交通大学已经开始了对黄瓜采摘机器人的研制[3],浙江大学对番茄采摘机器人进行了结构分析与设计的优化[4],中国农业大学对采摘机器人的视觉识别装置进行了研究[5]。
目前,我国研究的采摘机器人还有西红柿、橘子、草莓、荔枝和葡萄采摘机器人等[6-8]。
文章对苹果采摘机械手臂进行选型,进一步进行详细结构设计,最后对设计结果进行试验验证。
1 机械人机构选型及自由度的确定由于采摘机械人的作业对象是苹果,质量轻,体积小,故而可选择较为简单、灵活、紧凑的结构形式。
根据机械人手臂的动作形态,按坐标形式大致可将机械人手臂部分分为以下四类[9]:直角坐标型机械手;圆柱坐标型机械手;球坐标(极坐标)型机械手;多关节型机械手。
采摘机械臂的结构型式选取主要取决于机械人的活动范围、灵活性、重复定位精度、持重能力和控制难易等要求。
以上四种型式,它们的活动范围和灵活度逐渐增大。
经过对苹果采摘空间的研究,结果表明,苹果树树冠和底部的苹果分布极少,大多分布在树冠中部,大约有80%以上的苹果分布在距地面垂直高度1-2m、距树干左右方向1-2m的空间范围内,且阴阳两面的苹果分布率并无明显的差异。
摘要新疆是农业大省,又因为新疆昼夜温差大,水果的糖分积累多于其他省份种植的水果,使得新疆的瓜果香甜可口,所以有水果之乡的美誉,而南疆又是新疆水果的主产地。
在南疆种植的有非常出名的库尔勒香梨和阿克苏苹果等。
每年水果成熟的时候需要大量的劳动力争取采摘的时间,劳动强度大,成本高,效率低。
随着全球农业科技的发展,将液压升降平台用于水果采摘中可大大提高劳动效率。
水果采摘升降平台是一种新型的液压升降平台,旨在提高水果采摘的速度,减少劳动强度。
本文将介绍一种新型的自走式液压升降平台。
主有以下内容,从课题的提出,大量查阅相关文献资料,了解当前水果采摘的发展状况,比较了国内外的发展趋势。
然后提出了本文的设计方案,进行相关零件的设计计算及校核,绘制了二维工程图,最后在SolidWorks中建立了其三维模型,为水果采摘升降平台的设计优化提供了一种思路及方法。
关键词:水果采摘;升降平台;三维;SolidWorks;仿真目录1绪论 (1)1.1概述 (1)1.2.水果采摘研究现状 (1)1.3发展趋势 (1)1.4设计内容 (2)1.5设计意义 (2)2方案分析 (3)2.1升降方案分析比较 (3)2.2自走方案分析 (3)2.3电动机的选择 (3)2.4确定传动方案 (3)2.5带轮及V带的参数 (4)2.6 V带轮的设计 (4)2.7 CAD模型 (5)2.8本章小结 (5)3升降结构的设计 (6)3.1总体方案设计 (6)3.2铰架的设计 (6)3.3力和力矩的分析计算 (7)3.4铰架弯矩图分析 (8)3.5铰架有限元分析 (11)4液压系统的设计 (12)4.1液压缸的受力分析 (12)4.2液压缸最大受力时数值及角度计算 (12)4.3液压泵及液压缸的设计及选型 (13)5相关标准件的选型 (15)5.1轴承选择 (15)5.2联轴器的选择 (15)5.3键的选择 (16)6主要零件建模 (17)6.1 铰架 (17)6.2 上板 (17)6.3 大带轮及小带轮 (17)6.4 底箱 (18)6.5 整装图建模 (18)总结 (19)致谢 (20)参考文献 (21)工程概况本文首先介绍了果园水果采摘升降平台的研究背景及现状,研究目的和研究意义。
一、选题名称:
简易型水果采摘机
二、选题背景:
随着时代的发展,国民生产总值的增长,我国的经济总量正在持续增长,而农业在人们的生活中扮演着重要的角色,它是人们生活的最基本保障,农业的发展也成了人们生活水平的伊个重要标志。
现代农业向着机械化的时代发展,机械正在逐渐代替人们原始的劳动工具和原始的劳动方法,而且现代农业正呈现着前所未有的发展潜力,机械化的农业时代具有效率高、安全、便捷的特点。
在黄土高原上和其他地方有很多果农,他们用自己朴实的劳动为现代大城市的人们培育了大量的优质水果,但是一直以来在很多地方,人们还用着原始的人工采摘方法,现代的大型采摘机器又太过昂贵,人们在考虑自己的经济利益的同时不得不放弃机械采摘的高效率方法。
鉴于大多数农民不能承受大量的经济压力,从而设计简易的水果采摘机,方便农民采摘水果,也提高了农民的工作效率。
现在市面上的水果采摘机品种繁多,已申请专利的有二十个左右,每个产品有各自的特点,价格也大相径庭,人们有很多的选择余地;电动、手动、自动的,但是大多数体积都比较笨重,人本在采摘过程中有不适应感。
简易水果采摘机的原理很简单,和剪刀的原理是相同的杠杆原理。
人们用手里的手柄就可以简单的采摘果树高处的水果,结构简单,容易操作,安全舒适,可以实现不同高度和不同大小水果的采摘,而切还可以执行水果套袋任务,同时把执行机构的支架用作喷洒农药的支撑结构,实现了多用途。
如果投放市场可以成为果农的好选择!该简易水果采摘机也有不足的地方,结构简单,是非自动的···如果人们举着时间过长会有疲劳酸痛的感觉,而且水果在输送带里面可能会有擦伤,损坏水果造成不必要的经济的损失。
简易水果采摘机与其他同类机器相比结构简单,价格便宜,容易操作,而且可以满足不同高度的水果采摘任务。
把人们常见的、普通的剪刀杠杆原理利用进来,实现了农业的需求,果农都能接受,是他们的最佳选择.
三、方案的总体描述、拟实现的功能与应用场合及特点:
(1)、方案的总体描述:
总是在农村看见农民很吃力的爬上果树,或者站在梯子上进行水果,一方面不安全,另一方面对果树的树皮也不好。
为此设计简易水果摘机。
该水果采摘机最大的特点就是简易、方便、便宜、该水果采摘机结构简单,其中包括操作手柄1,工作杆2,反弹弹簧
3,执行机构架4,手柄架5,执行采摘刀片6,水果运送带7。
其中执行机构架的B段和运动杆是可伸缩杆,用以满足不同高度的采摘任务。
当果农驱动操作手柄的时候,根据杠杆原理,可驱使执行采摘刀片进行剪切,水果被剪切后,顺着用棉质材料制成的水果运送带掉进水果筐里面。
棉质的水果运送带可保证水果表面不受摩擦,从而保证了水果的质量和质地。
(2)、该发明拟实现的功能:
通过简易水果采摘机可以实现简单方便地采摘任务,而且要实现不同高度的水果采摘任务;对于不同大小的水果也要有不同的水果采摘口来适应不同大小水果的采摘,为保证水果鲜美和不被昆虫破坏,该采摘机在换掉说过采摘刀片的时候,可以实现水果套袋;换上农药喷头的时候还可以实现高位水果喷洒农药的完成。
当设计更多到头的时候可以实现不同水果用一种机器采摘,真正实现多用途,提高农民的工作效率和现代农业的机械化程度。
(3)、产品的应用场合及其特点
应用场合:大中小型果园的水果采摘,对于苹果、桃子、鸭梨、杏、李子等类球形水果的采摘,水果树木高大,高位水果不易采摘,人工采摘费时费力的情况下,均可使用该简易型水果采摘机。
对于高位的水果农药喷洒任务,高位、树枝头等人不易够得着的水果套袋任务。
特点:与以前的水果采摘机相比,该型水果采摘机有简单、容易操作、价格便宜、用途较多,机器采摘对水果的损伤小,机器材质都用塑料制成,轻便,采摘效率高而且到头等可以进行二次更换,产品的利用率提高。
四、工作原理与结构:
(1)、工作原理及工作原理图:
该水果采摘机结构简单,其中包括操作手柄1,工作杆2,反弹弹簧3,执行机构架4,手柄架5,执行采摘刀片6,水果运送带7。
其中执行机构架的B段和运动杆是可伸缩杆,用以满足不同高度的采摘任务。
当果农驱动操作手柄的时候,根据杠杆原理,可驱使执行采摘刀片进行剪切,水果被剪切后,顺着用棉质材料制成的水果运送带掉进水果筐里面。
棉质的水果运送带可保证水果表面不受摩擦,从而保证了水果的质量和质地。
当果农把采摘刀片更换为套袋装置,便可以进行水果的套袋工作,方便快捷,效率高。
同时果农也可以用采摘机的执行架作为支架进行农药喷洒工作,综上所诉,该简易型水果采摘机实现了农业生产中的不同工作的集中化。
简易型水果采摘机原理示意图
(2)、分析计算:
N=3, ph=4 所以:该执行机构的自由度为:
f=3x3—2x4=1
即该机构具有唯一的运动方式一般水果树的高度在3—4米之间,所以该机构操作杆的长度也应该设置在该高度范围左右,又由于执行杆和支撑杆都市可伸缩杆,所以该产品的正常状态下的长度为1米左右。
这两个杆设置为四个短节,拉长后可达到果树的高度。
对于水果运送带,由于它必须通到地面且为防止与地面发生严重的碰撞,所以运送带要比执行杆长1米左右,即就是运送带在5米左右的长度。
到头的直径要比一般水果大,设置为12cm左右即可。
三、其余说明:
该水果采摘机的刀头是圆形的,半径在12—15cm左右,两个刀片都为半圆形的;套袋的刀头与采摘刀头是不一样的,设计为可以拖住水果套袋,且要能够自动将套袋口封住;将刀架去掉后可以安装农药喷头进行农药喷洒,执行机构架可作为农药喷洒管的支撑机构拖住管子。
由该采摘机还可以衍生出其他的水果采摘机,只需要将刀架口和刀头改变一下。
五、总结:
(1)、采用的的思维方法和技巧
#智力激励法:每个发明创造都离不开智力的激励,每个人的智都是有待开发的,做这次创新论文,同样我的智力得到了激发。
刚开始没有一点思路,但是当自己坐下来慢慢想的时候就可以萌生出许多想法,然后再联系实际生活,把想到的东西啊想着把他引用到实际生活中去,看到的东西都可以激发自己的智力,只要好好想。
#类比法:类比法是指用待发明创造的对象与某一具有同一属性的已知事物进行对照类比,以便从中得到启发从而进行发明创造。
以前的水果采摘机品种多,各有千秋,但是相比下来,他们都有一个通病,就是比较笨重和繁琐,用起来不方便,所以自己感觉发明一种简易的水果采摘机是很有必要的。
#设问法:设问法是通过有关问题的形式去发现事物的症结所在并继续发明创造的一类技法。
在此次创造过程中,我多次反问自己。
刚开始就想着他能够采摘水果就可以了,但是最后发现不仅可以采摘水果,还可以实现水果套袋机械化,还在问自己有没有其他的用途,最后发现还可以用来喷洒农药,由当初的单一功能扩展到三个功能。
刚刚开始我想把机器的执行机构架用钢铁做成,后来发现如果用钢铁的话会比较重,所以反思一下其实用硬塑料就可以了。
(2)、体会:
这是一次对我们来说这是一个比较难的任务,因为以前就没有过这么比较专业的论文写作。
从开始想做什么课题就比较难,但是经过冥思苦想,联系生活实际,想出了水果采摘机这一个想法。
从开始背景描述,后面的描述都是比较的难的,但是自己还是通过一步步想,最后将这个任务完成。
通过这次作业,我感觉到科学的严谨和神秘,每一步的计算都要很仔细,一个产品的问世要经过很多的步骤和很多的努力。
同时在这个过程中也锻炼了自己的思维,也是一个应用专业只是解决问题的过程,对自己是一个小的锻炼,对自己以后走上工作岗位也是一个借鉴。
六、参考文献:
1、徐斌,便携式水果分级采摘器的原理及应用。
内蒙:《现代农业科技》2007年第13期
2、卢伟; 宋爱国; 蔡健荣; 孙海波; 陈晓颖,采摘机器人结构设计及运动学算法。
东南大学学报(自然科学版),2011年1月。