目标检测的红外和可见光图像融合
- 格式:pdf
- 大小:472.70 KB
- 文档页数:6
图像融合简述1、图像融合:图像融合是指将多幅图像,在经过去噪、配准等预处理后,再依据某些融合规则合成⼀幅图像的过程。
融合图像对⽬标的描述更清晰和准确,更适合图像后续的处理。
(多传感器图像融合(可见光图像和红外图像融合)、单⼀传感器多聚焦图像融合)图像融合需要遵守的3个基本原则:1)融合后图像要含有所有源图像的明显突出信息;2)融合后图像不能加⼊任何的⼈为信息;3) 对源图像中不感兴趣的信息,如噪声要尽可能多地抑制其出现在融合图像中。
融合图像的作⽤①图像增强。
通过综合来⾃多传感器(或者单⼀传感器在不同时间)的图像,获得⽐原始图像清晰度更⾼的新图像。
②特征提取。
通过融合来⾃多传感器的图像更好地提取图像的特征,如线段,边缘等。
③去噪。
④⽬标识别与跟踪。
⑤三维重构。
2、图像融合应⽤领域图像融合技术的研究呈不断上升的趋势,应⽤领域也遍及遥感图像处理,可见光图像处理,红外图像处理,医学图像处理等。
3、⼏种典型的数字图像融合⽅法主成分分析法差分演化计算法(DE)遗传算法 GA粒⼦群算法(PSO)蚁群算法神经⽹络法⼩波变换法模糊图像融合。
如果按研究⽅法分类,彩⾊图像融合⼤体可以分为两类:基于⼈的视觉系统和直接基于物理光学。
基于物理光学的研究是直接在颜⾊空间RGB中对图像进⾏处理、融合。
⽽基于⼈的视觉系统的融合,更多是从感官上在⾊彩的 HI V空间对图像进⾏融合。
4、融合过程:图像融合的⽅法很多,按照信息提取的层次从低到⾼的原则可划分为 3 类:像素级图像融合、特征级图像融合和决策级图像融合。
像素级融合依据⼀定的融合规则直接对源图像基于像素的特征进⾏融合,最后⽣成⼀幅融合图像的过程。
它保留源图像的原始信息最多、融合准确性最⾼,但该类⽅法也存在着信息量最⼤、对硬件设备和配准的要求较⾼、计算时间长和实时处理差等缺点。
特征级图像融合是⾸先对源图像进⾏简单的预处理,再通过⼀定模型对源图像的⾓点、边缘、形状等特征信息进⾏提取,并通过合适的融合规则进⾏选取,再依据⼀定的融合规则对这些特征信息进⾏选取和融合,最后⽣成⼀幅融合图像的过程。
Microcomputer Applications V ol.27,No.4,2011研究与设计微型电脑应用2011年第27卷第4期5文章编号:1007-757X(2011)04-0025-03基于像素级图像融合的Mean Shift 目标跟踪张国华,卜纪伟,薛雷,肖刚,潘汉摘要:针对可见光、红外单模图像序列进行Mean Shift 目标跟踪时存在的问题,提出了先对可见光、红外图像序列进行像素级动态图像融合,采用加权平均融合和基于区域目标检测的图像序列融合框架,再对融合结果进行Mean Shift 目标核函数直方图建模,然后进行匹配跟踪。
实验采用了实际图像序列。
实验结果表明,针对目标进行跨背景区域的运动,该方法较采用单模图像序列进行跟踪具有更好的鲁棒性,并且满足实时性的要求。
关键字:图像融合;动态图像融合;Mean Shift;目标跟踪;融合跟踪中图分类号:TP311文献标志码:A0引言目标跟踪一直是计算机视觉的一个重要组成部分和研究热点。
所谓目标跟踪就是在视频图像序列的每幅图像中找到感兴趣的运动目标所处的区域,并对这些目标和区域进行定位的过程。
一个好的视频跟踪算法一般须满足两个基本要求:实时性与鲁棒性。
而这两条通常难于同时满足,往往需要某种折中,以得到较好的综合性能。
自从Comaniciu [1]等人把Mean Shift 算法用于目标跟踪取得很大成功后,近年来研究者已经提出了许多改进算法,且具有计算简单、实时性好等特点,得到了广泛的应用。
然而不管是针对可见光图像还是红外图像,当目标特征不明显、存在很大背景杂波或目标从一背景区域运动到另一背景区域等情况下,这些问题使得目标跟踪变得困难起来。
图像融合正是对从同一场景得到的不同模态的图像进行智能的合并,得到该场景的单一的扩展了的景象描述。
目前基于红外与可见光双传感器的图像融合已经发展非常迅速,很多学者已提出了多种图像融合算法,并得到了很好的效果。
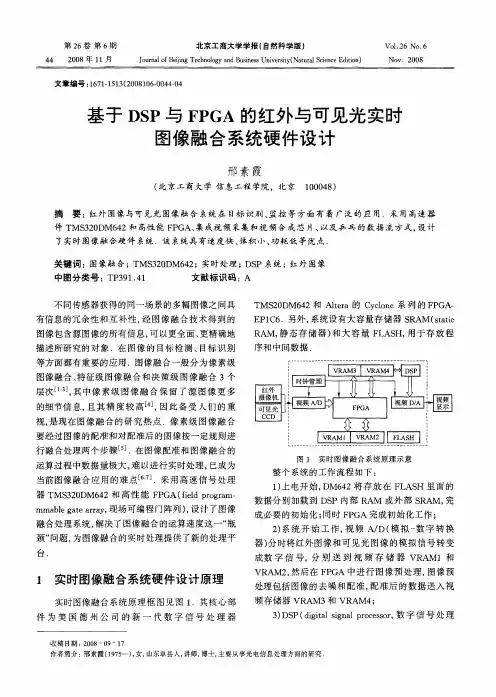
一种风机叶片图像采集及缺陷检测系统赵春溢,郭洪涛,郭 涛,梁 国,荆海城(中电投东北新能源发展有限公司,辽宁沈阳 110179)摘要:本文针对目前风机叶片人工检测工作量大、效率低、缺陷检测准确率不高的问题,提出并设计了一种基于无人机图像的缺陷自动化检测系统。
本文介绍了系统的图像采集系统、采集方法、缺陷检测原理及检测效果:系统以无人机为飞行载体实现了(风机叶片的)自动巡检,从而提高了巡检效率,降低了人工的工作量;通过图像分割及缺陷检测算法设计实现了缺陷可疑区域的自动检测;可见光加红外光双光融合提高了叶片缺陷自动识别的准确性。
经过多次现场测试验证,本系统可以精确、快速地实现鼓包,裂纹和褶皱等缺陷的自动识别与检测。
关键词:无人机;风机叶片;缺陷检测;图像处理中图分类号:TP391 文献标识码:A 文章编号:1001-8891(2020)10-1203-08Defect Detection System Based on UA V Images for Wind Turbine BladesZHAO Chunyi,GUO Hongtao,GUO Tao,LIANG Guo,JING Haicheng(SPIC Northeast New Energy Development Co., Ltd., Shenyang 110000, China)Abstract:This study proposes and designs an automatic defect detection system based on UAV images for wind turbine blades, aimed at alleviating problems with manual detection methods, such as low efficiency and inaccurate defect detection. This paper introduces the system's image acquisition system, acquisition method, defect detection principle, and detection result. This system uses a UAV as the flying carrier to realize automatic inspection of wind turbine blades, thereby improving the inspection efficiency and reducing the manual workload. Through image segmentation and defect detection algorithm design, automatic detection of suspicious defect areas is achieved. Double light fusion of visible and infrared light improves the accuracy of automatic blade defect recognition. After multiple field tests and verification, the system is shown to accurately and quickly realize the automatic identification and detection of defects, such as bulges, cracks, and wrinkles.Key words:UAV, wind turbine blade, defect defection, image processing0 引言目前中国已是全球最大的风电市场。
图像融合毕业论文图像融合毕业论文随着科技的不断发展和人们对图像处理技术的需求增加,图像融合作为一种重要的图像处理技术,逐渐受到了广泛关注。
图像融合是将多幅不同源的图像融合成一幅具有更多信息的图像,以便更好地满足人们的需求。
这种技术在军事、医学、环境监测等领域都有广泛的应用。
图像融合的目标是通过将多个图像的信息融合到一起,得到一幅具有更多信息的图像。
融合后的图像可以提供更多的细节和更全面的信息,有助于人们更好地理解和分析图像。
图像融合的方法主要有像素级融合、特征级融合和决策级融合等。
像素级融合是将多个图像的像素逐个进行融合,得到新的像素值。
这种方法简单直接,但容易造成图像的模糊和失真。
特征级融合则是通过提取图像的特征,将特征进行融合得到新的图像。
这种方法可以保留图像的细节和特征,但需要较复杂的算法和计算过程。
决策级融合是将多个图像的决策信息进行融合,得到最终的决策结果。
这种方法可以提高图像的准确性和可靠性,但需要对决策信息进行有效的融合和处理。
在图像融合的研究中,深度学习技术的应用也逐渐受到关注。
深度学习是一种通过模拟人脑神经网络的方式进行机器学习的技术,可以自动学习和提取图像的特征。
通过深度学习技术,可以更好地实现图像的融合和处理。
图像融合在军事领域有着重要的应用。
在军事侦察中,通过将多个传感器获取的图像进行融合,可以得到更全面的情报信息。
这对于军事作战和决策具有重要意义。
此外,在军事目标识别和跟踪中,图像融合也可以提高目标的检测和识别准确性。
在医学领域,图像融合可以用于医学影像的处理和分析。
通过将多个医学影像进行融合,可以得到更全面的病情信息,有助于医生做出更准确的诊断和治疗方案。
此外,图像融合还可以用于医学影像的重建和增强,提高影像的质量和清晰度。
环境监测是另一个图像融合的应用领域。
通过将多个传感器获取的图像进行融合,可以更好地监测和分析环境中的变化和问题。
例如,通过将红外图像和可见光图像进行融合,可以提高对于火灾、烟雾等灾害的监测和预警能力。
“低慢小”目标的光电与雷达复合探测跟踪方法摘要:光电跟踪系统的研究多偏于对图像检测算法的提升,奚玉鼎提出一种快速搜索控制“低慢小”目标的光电系统,该系统利用相机采集图像,经过图像处理检测算法实现“低慢小”目标的搜索探测。
通过可见光和红外图像的有效融合来检测“低慢小”,提出了一种基于一维信息熵和加权平均的ROI提取模块,减少背景信息的干扰;其次,利用局部SuBSENSE方法进行局部背景建模,完成“低慢小”目标的精确检测。
以上研究,大多都集中在目标检测跟踪研究,重点多偏于算法提升,较少涉及搜索跟踪切换关键环节。
雷达系统和光电系统各有优缺点,对于一套完整的“低慢小”探测跟踪系统,雷达主要负责目标探测,其探测距离和探测范围指标均优于光电系统。
而从目标定位精度上来说,雷达系统的精度在度级,而光电系统的精度在微弧度级。
雷达有近距离盲区,无法对近距离目标进行探测,此时光电跟踪系统可以弥补雷达探测盲区。
雷达仅获取目标的位置信息,以及目标移动速度信息,SAR成像周期较长,而光电系统能够实时获得目标的可视化图像和视频信息,同时光电系统跟踪时可利用雷达探测的目标距离信息进行焦距调节。
单台雷达对目标的位置测量,其距离与角度上的系统偏差对于所有的目标都相同,所以对跟踪系统的性能不会造成较大的影响和提升。
本文主要分析“低慢小”目标的雷达与光电复合探测跟踪方法。
关键词:低慢小;脉冲多普勒雷达;光电;数据配准;扩展卡尔曼引言“低慢小”目标是指较低空域飞行,较慢飞行速度,且外形特性小(不易被发现)的飞行器与悬空物。
常见的“低慢小”目标有多旋翼无人机,固定翼轻型飞机,热气球等。
由于“低慢小”目标体积小,机动性强,具有一定载弹能力,很容易对机场,油田等有关国防、民生的重要的设施构成威胁,所以对“低慢小”目标进行全天时,全天候探测与防范有着重要意义和价值。
基于雷达的“低慢小”目标探测研究通常是基于检测算法的提升进而检测能力,针对强杂波环境下的小目标被杂波淹没的情况,利用小波变换和主成分分解可以实现雷达小目标信号与杂波信号的分离,从而达到杂波抑制和小目标检测的目的。

halcon加法运算Halcon加法运算Halcon是一种功能强大的机器视觉软件库,广泛应用于工业自动化、医疗影像、无人驾驶等领域。
其中,加法运算是Halcon中常用的图像处理操作之一。
本文将详细介绍Halcon加法运算的原理、应用场景以及具体操作步骤。
一、原理Halcon中的加法运算是指对两幅图像的对应像素进行相加,得到一幅新的图像。
加法运算可以用于图像的融合、增强、去噪等方面,能够提高图像质量和信息提取的准确性。
二、应用场景1. 图像融合加法运算可以将两幅图像的亮度信息进行融合,生成一幅新的图像。
在红外图像和可见光图像融合中,加法运算可以将两幅图像的亮度信息相加,从而使得图像的细节更加清晰,提高目标检测和识别的准确率。
2. 图像增强通过将一幅图像与另一幅图像进行加法运算,可以增强图像的对比度和细节。
例如,在医学影像中,通过将一幅CT图像与一幅MRI 图像进行加法运算,可以得到更清晰、更具信息量的图像,有助于医生进行疾病诊断和治疗。
3. 图像去噪在图像去噪中,加法运算可以用于降低图像中的噪声。
通过将一幅含有噪声的图像与另一幅经过滤波处理的图像进行加法运算,可以减弱噪声对图像的影响,提高图像的质量。
三、操作步骤1. 加载图像使用Halcon的图像加载函数,将需要进行加法运算的两幅图像加载到内存中。
2. 图像预处理根据具体需求,对图像进行预处理。
例如,可以对图像进行灰度化、滤波、边缘检测等操作,以提取出目标区域或减少噪声。
3. 进行加法运算使用Halcon的加法运算函数,对预处理后的两幅图像进行加法运算,得到一幅新的图像。
4. 结果显示与保存将加法运算得到的图像显示在屏幕上,以便观察效果。
同时,可以选择将结果保存到本地磁盘,方便后续使用或分析。
四、总结通过Halcon的加法运算,可以实现图像的融合、增强和去噪等功能,从而提高图像的质量和准确性。
在实际应用中,可以根据具体需求和图像特点,灵活选择加法运算的方式和参数,以达到最佳的效果。
红外-可见光模态通用模型,综述全文共四篇示例,供读者参考第一篇示例:红外-可见光模态通用模型,是一种通过结合红外和可见光两种不同波段的图像数据来实现更准确的目标检测和识别的深度学习模型。
在过去的几年中,随着计算机视觉技术的不断发展,红外-可见光模态通用模型在很多领域都展现出了巨大的潜力和应用前景。
一、红外-可见光模态通用模型的发展历程在过去,可见光图像一直是计算机视觉研究的重点,但是它在某些情况下并不是最理想的选择,比如在夜间或恶劣天气条件下,可见光无法提供足够的信息进行目标检测和识别。
而红外图像在这种情况下表现更好,因为红外波长的特性使其能够穿透一些视觉障碍,比如雾、烟等,从而提供更清晰的信息。
结合红外和可见光两种不同波段的图像数据,可以在不同情况下共同提供更准确的目标检测和识别结果。
红外-可见光模态通用模型主要基于深度学习算法,通过训练模型来学习不同波段图像数据之间的关系,从而实现更准确的目标检测和识别。
一般情况下,模型的输入是同时采集的红外和可见光图像数据,通过网络的卷积层、池化层和全连接层等处理,将两种不同波段的信息融合在一起,最终输出目标检测和识别的结果。
红外-可见光模态通用模型在很多领域都有着广泛的应用。
比如在监控领域,结合红外和可见光图像可以提高监控系统在夜晚或恶劣天气条件下的可靠性;在无人机领域,红外-可见光模态通用模型可以提高无人机的目标检测和识别能力;在军事领域,红外-可见光模态通用模型可以帮助军队在夜间或复杂环境下更准确地识别敌方目标等。
尽管红外-可见光模态通用模型在很多领域都有着广泛的应用,但是仍然面临着一些挑战。
红外和可见光两种波段的数据之间存在很大的差异,如何更好地融合这两种数据仍然是一个难题;模型的训练需要大量的标注数据,这对于一些特定领域来说可能是一个困难。
未来,我们可以通过进一步的研究和技术发展来解决这些问题,进一步提升红外-可见光模态通用模型的性能和应用范围。
红外图像拼接1 概述1.1意义图像拼接技术是基于获取图像场景的大小和成像器件的分辨率两者之间的矛盾上产生的。
当人们需要获取最大视野的图像时,就必须要调节成像器件的镜头焦距。
由于成像器件的分辨率是一定的,获得的视野越大分辨率越低,反之,分辨率越高则获得的视野也越小。
在人们既要求高分辨率又要求大视野的场景图像的需求下,图像拼接技术产生了。
随着图像拼接相关理论的不断完善和计算机应用的不断发展,图像拼接技术日益成为图像处理的热点之一。
红外图像拼接技术就是保证分辨率不变,将两幅或者多幅小视野的场景图像拼接成一幅宽视野的无缝目标图像的过程。
拼接的过程不仅减少了图像间存在的冗余,而且宽视野的场景图像可以让观察者在稳定的图像分辨率下观察到更丰富的场景信息。
红外拼接技术可以应用于红外预警、周视扫描、目标识别和探视中。
1.2图像拼接流程图像拼接技术是将一组相互间具有重叠部分的图像序列进行空间匹配对准,经重采样融合后形成一幅包含各个图像序列信息的宽视角的、完整的、高清晰的无缝拼接图像技术。
图像拼接实质就是图像空间上的对齐、灰度上的融合。
一般来说,图像拼接的过程主要分为三个步骤:图像预处理,图像配准和图像合成。
其中图像配准是整个图像拼接的基础。
图像配准和图像合成是图像拼接的两大关键技术。
参考图拼接预处理待拼接图图像匹配和对齐图像融合和边界平滑目标图像图像预处理图像配准图像融合图1 图像拼接的基本流程图像预处理:目的是改善图像的质量,从而保证下一步图像配准的精度,包括对图像对比度拉伸、噪声点抑制(如直方图处理、图像的平滑滤波)等。
对于一些存在几何畸变的图像还要进行校正。
如果在图像质量不好的情况下直接进行图像拼接,容易造成误匹配。
在红外图像对比度特别低、噪声点多的情况,如果不进行预处理,可能提取不到足够的匹配点。
图像配准:目的是建立参考图像及待配准图像之间的匹配数学模型、完成图像空间上的对齐。
主要是将从不同传感器或者在不同拍摄条件下获取的同一场景的两幅或者多幅图像之间进行匹配和对其的过程。
第39卷第7期激光与红外Vo.l39,No.7 2009年7月L ASER&I NFRARED J u l y,2009文章编号:100125078(2009)0720693207#综述与评论#红外与可见光图像配准研究现状与展望苑津莎,赵振兵,高强,孔英会(华北电力大学电气与电子工程学院,河北保定071003)摘要:红外与可见光图像配准是常见的多模态图像配准,它广泛应用于军事、遥感等领域,有必要对其研究现状进行综述。
在描述了红外与可见光图像配准问题后,首先简述了图像配准的一般方法,分为基于图像区域的配准方法和基于图像特征的配准方法,重点述评了局部不变特征方法中的SI FT算法和S URF算法;然后按文献发表时间顺序对红外与可见光图像配准的国外和国内研究现状进行了详细述评;总结了红外与可见光图像配准研究中存在的问题;最后对其进行展望,并指出未来的研究重点是以SI FT算法和S URF算法为研究基础去构造对模态不敏感的不变特征和其相应的描述子。
关键词:图像配准;红外;可见光;SI FT;S URF中图分类号:T N911.73文献标识码:AR evie w and pros pect on i n frare d/visi b le i m age registrationYUA N Ji n2sha,Z HAO Zhen2bing,G AO Q iang,KONG Y i n g2hui(School of E lectr i ca l and E l ectronic Eng i neer i ng,North Ch i na E l ec tric P o wer Un i vers it y,Baoding071003,Ch i na)Ab stra ct:Infrared/visi b le i m age registrati on is the co mm o n m ulti2modal i m age regi strati on,and it has been w i dely ap2pli ed to l ots of fie l ds such asm ilitary and re m ote sensi ng.So,it is necessary to revie w the current research situati on ofi nfrared/vi sible i m age registratio n.A fter dep icti ng the pro b le m of i nfrared/visi b le i m age registrati on,general m ethodsof i m age regi strati on is desc ri bed briefl y.They are d i vi ded i nto t wo t ypes:area2based m et hods and fea t ure2based m eth2o ds.SIFT a l gorith m and SURF a l gor it hm i n loca l i nvar i ant feat ures are m a i n l y d i scussed.According to ti m e of litera2ture pub lishi ng,the analysis and revi ew for i nfrared/visi b l e i m age registra ti on m ethods at ho m e and abroad are carriedo u t i n detai.l Then the d ifficu lties of i nfrared/vi sible i m age registratio n techn i que are su mma rized and eva l uated.A tl ast,prospects of i nfrared/vi sible i m age registratio n a re made,and the fut ure research o n t h is field could pay m ore a t2tenti on to construct i nvariant and m o da lity2i nsensiti ve features and the i r descri ptors on t he basis of research of S I FT a l2gorith m and S URF a l gorith m.K ey w or ds:i m age registratio n;i nfrared;visi b le;SIFT;SURF1引言图像配准是个极富挑战性的研究领域,所谓图像配准是指依据一些相似性度量决定图像间的变换参数,使从不同传感器、不同视角、不同时间获取的同一场景的两幅或多幅图像,变换到同一坐标系下,在像素层上得到最佳匹配的过程[1-6]。