三自由度Delt机器人工作空间仿真方法研究
- 格式:pdf
- 大小:1.39 MB
- 文档页数:11
Delta并联机器人运动学协同仿真技术作者:董保香来源:《东方教育》2017年第20期摘要:Delta机器人是并联机器人中的一种优秀代表。
可以成功的在狭小的工作空间进行高速抓取物体,以此做为项目的样机。
本文利用NX与Matlab/Simulink协同仿真的方法,在simulink中搭建了Delta机器人的仿真模型,并用该模型协同NX实现了Delta机器人的运动学仿真。
关键词:协同仿真;Matlab/Simulink;NX1引言传统的机电产品设计中,机械结构设计和控制系统设计是各自独立的,分别采用功能不同的软件进行设计、调试和试验,最后通过物理样机,进行机械结构和控制系统的联合调试,如果发现问题,需要各自分别修改,然后再进行物理样机的制造和调试,这需要较长的开发周期[1]。
NX是当今世界最先进的CAD/CAM/CAE三维集成化软件之一,为用户提供了一整套集成的、全面的产品开发解决方案,用于产品设计、分析和制造,广泛应用于航空航天、汽车、通用机械和电子等工业领域。
Simulink是MATLAB中的一种可视化仿真工具,它提供了一个动态系统建模、仿真和综合分析的集成环境,被广泛应用于控制理论和数字信号处理的复杂仿真和设计,是常用的控制系统设计软件之一。
利用NX与Simulink的协同仿真,可以将机械结构与控制系统设计仿真软件有机结合起来,然后对系统进行协同分析,直到获得满意的设计效果,这大大的提高了设计效率,缩短了开发周期,降低了开发产品的成本,获得了优化的系统整体性能。
本文利用NX与Matlab/Simulink协同仿真的方法,设计了Delta机器人的仿真模型,并用该模型实现了Delta机器人的运动学仿真。
2.Delta机器人结构设计Delta机器人是一种具有3个平动自由度的高速并联机器人,它是由三组完全相同摆动杆机构连接定平台(上正三角形)和动平台(下正三角形)的空间机构,每组摆动杆机构均由驱动杆和从动杆(四个球铰与杆件组成的平行四边形)组成,驱动杆与定平台之间通过转动副连接,从动杆与动平台通过转动副连接。
一、Delta并联机器人1. Delta并联机器人概述Delta机器人属于高速、轻载的并联机器人,一般通过示教编程或视觉系统捕捉目标物体,由三个并联的伺服轴确定抓具中心(TCP)的空间位置,实现目标物体的运输,加工等操作。
Delta机器人主要应用于食品、药品和电子产品等加工、装配。
Delta机器人以其重量轻、体积小、运动速度快、定位精确、成本低、效率高等特点,正在市场上被广泛应用。
2. Delta并联机器人特点Delta机器人是典型的空间三自由度并联机构,整体结构精密、紧凑,驱动部分均布于固定平台,这些特点使它具有如下特性:承载能力强、刚度大、自重负荷比小、动态性能好。
并行三自由度机械臂结构,重复定位精度高。
超高速拾取物品,一秒钟多个节拍。
3. Delta并联机器人应用系统Delta并联机器人应用系统主要由三个部分组成:机器人、输送线及机器人安装框架。
其布局如下图1。
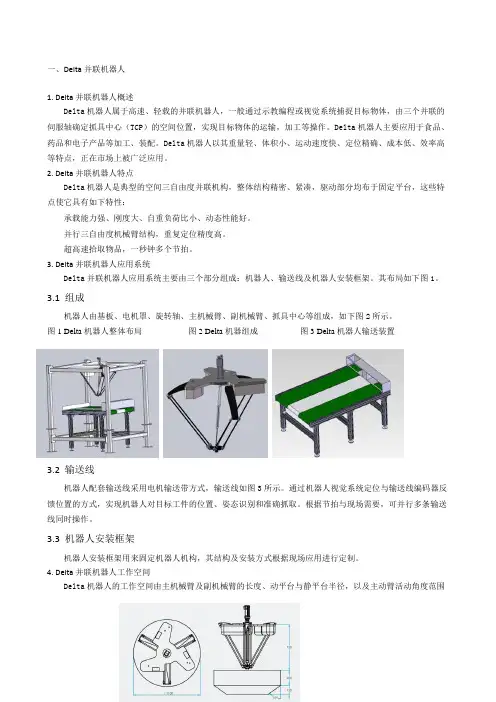
3.1 组成机器人由基板、电机罩、旋转轴、主机械臂、副机械臂、抓具中心等组成,如下图2所示。
图1 Delta机器人整体布局图2 Delta机器组成图3 Delta机器人输送装置3.2 输送线机器人配套输送线采用电机输送带方式,输送线如图3所示。
通过机器人视觉系统定位与输送线编码器反馈位置的方式,实现机器人对目标工件的位置、姿态识别和准确抓取。
根据节拍与现场需要,可并行多条输送线同时操作。
3.3 机器人安装框架机器人安装框架用来固定机器人机构,其结构及安装方式根据现场应用进行定制。
4. Delta并联机器人工作空间Delta机器人的工作空间由主机械臂及副机械臂的长度、动平台与静平台半径,以及主动臂活动角度范围这几个参数来确定。
以负载为一公斤的delta机器人工作空间为例,如下图所示。
5. Delta并联机器人运动轨迹Delta机器人基本的运动轨迹如下图,由S1、S2、S3构成门字形的三部分轨迹组成,分别为拾取、平移、放置三个阶段。
Delta机器人进行抓取目标工件时主要以走门字形运动轨迹,也可根据不同的应用要求,规划不同的运动轨迹。
三自由度机器人运动学方程引言机器人技术已经广泛应用到各个领域,其中机器人的运动学是机器人控制的关键。
机器人的运动学研究如何描述和计算机器人的位姿、轨迹和运动规律。
本文将介绍三自由度机器人的运动学方程,详细说明其计算方法和应用。
三自由度机器人简介三自由度机器人由三个旋转关节组成,每个关节可以绕固定的轴线进行旋转运动。
三自由度机器人可以在三维空间内进行灵活的运动,并完成一系列复杂的任务。
在应用中,三自由度机器人常被用于装配线上的物体抓取和搬运任务,以及医疗领域中的手术助理等。
运动学方程的推导三自由度机器人的运动学方程描述了机器人末端执行器的位姿与关节角之间的关系。
推导运动学方程的方法可以采用代数运算和几何推导的方式。
这里我们使用几何推导的方法。
我们假设三自由度机器人的起始位置为坐标系原点,末端执行器的位姿为坐标系O, P,三个关节的旋转角度分别为θ1、θ2和θ3。
首先,我们构建机器人的坐标系。
假设关节1的旋转轴与x轴重合,关节2的旋转轴与y轴重合,关节3的旋转轴与z轴重合。
则三个关节的旋转矩阵分别为:旋转矩阵1:R1 = [ cosθ1, -sinθ1, 0] [ sinθ1, cosθ1, 0] [ 0, 0, 1]旋转矩阵2:R2 = [ cosθ2, 0, sinθ2] [ 0, 1, 0] [-sinθ2, 0, cosθ2]旋转矩阵3:R3 = [ cosθ3, -sinθ3, 0] [ sinθ3, cosθ3, 0] [ 0, 0, 1]然后,我们计算机器人末端执行器的位姿矩阵T,代表机器人末端执行器在基坐标系下的位姿。
T = R1 * R2 * R3接下来,我们将位姿矩阵T转化为位姿向量[px, py, pz, α, β, γ],其中px, py, pz表示机器人末端执行器的位置坐标,α, β, γ表示机器人末端执行器的姿态角。
通过推导运动学方程,我们可以得到机器人末端执行器的位置坐标和姿态角与关节角之间的关系。
三自由度动力学模型1. 动力学模型概述动力学是研究物体运动的原因和规律的学科,而三自由度动力学模型则是一种描述物体在三个自由度上运动的数学模型。
在机器人控制、航天器姿态控制等领域中,三自由度动力学模型被广泛应用。
三自由度动力学模型通常用于描述物体在空间中的姿态变化和运动轨迹。
其中,自由度指的是物体可以沿着某个轴线或平面进行移动的数量。
对于一个具有三个自由度的系统,需要考虑它们之间的相互作用、受力情况以及运动规律等因素。
2. 动力学方程推导为了建立三自由度动力学模型,我们需要推导出系统的运动方程。
这一过程可以通过拉格朗日方法来完成。
首先,我们需要定义系统的广义坐标和广义速度。
广义坐标用来描述系统中每个独立变量所对应的位置或角度,而广义速度则表示这些变量随时间变化的速率。
接下来,我们利用拉格朗日函数来描述系统的能量,并通过最小作用量原理得到系统的拉格朗日方程。
拉格朗日方程可以写作:d dt (∂L∂q i)−∂L∂q i=Q i其中,L是系统的拉格朗日函数,q i是广义坐标,q i是广义速度,Q i是外部施加在系统上的力。
将拉格朗日方程应用到三自由度动力学模型中,我们可以得到三个关于时间变化的方程。
这些方程描述了系统在每个自由度上的运动规律。
3. 动力学模型求解一旦我们建立了三自由度动力学模型并得到了运动方程,就可以通过求解这些方程来获得系统的运动行为。
通常情况下,我们会将运动方程转化为矩阵形式,并使用数值计算方法进行求解。
其中,矩阵形式的运动方程可以写作:M(q)q̈+C(q,q̇)q̇+G(q)=τ其中,M(q)是质量矩阵,描述了物体在每个自由度上的质量分布情况;C(q,q̇)是科里奥利矩阵,表示惯性力和科里奥利力的影响;G(q)是重力矩阵,描述了物体受到的重力作用;τ是外部施加的控制力。
通过求解上述方程,我们可以得到系统在每个自由度上的加速度q̈,从而推导出物体的姿态变化和运动轨迹。
4. 动力学模型应用三自由度动力学模型在机器人控制、航天器姿态控制等领域中有着广泛的应用。
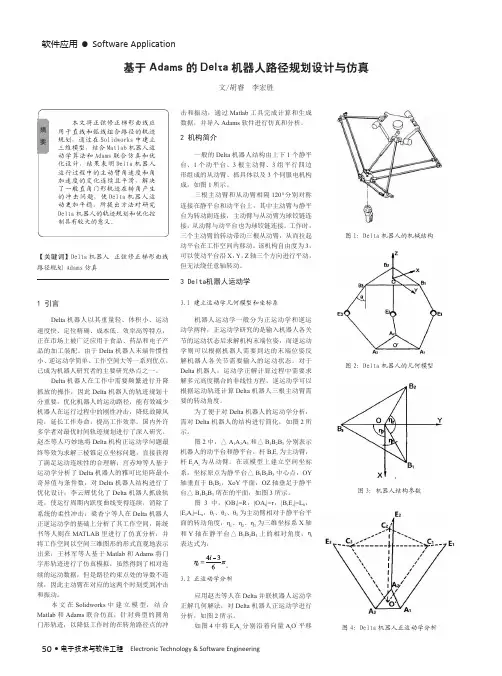
50 •电子技术与软件工程 Electronic Technology & Software Engineering【关键词】Delta 机器人 正弦修正梯形曲线 路径规划 Adams 仿真1 引言Delta 机器人以其重量轻、体积小、运动速度快、定位精确、成本低、效率高等特点,正在市场上被广泛应用于食品、药品和电子产品的加工装配。
由于Delta 机器人末端件惯性小、逆运动学简单、工作空间大等一系列优点,已成为机器人研究者的主要研究热点之一。
Delta 机器人在工作中需要频繁进行升降抓放的操作,因此Delta 机器人的轨迹规划十分重要,优化机器人的运动路径,能有效减少机器人在运行过程中的刚性冲击,降低故障风险,延长工作寿命,提高工作效率。
国内外许多学者对最优时间轨迹规划进行了深入研究。
赵杰等人巧妙地将Delta 机构正运动学问题最终等效为求解三棱锥定点坐标问题,直接获得了满足运动连续性的合理解;宫赤坤等人基于运动学分析了Delta 机器人的雅可比矩阵最小奇异值与条件数,对Delta 机器人结构进行了优化设计;李云辉优化了Delta 机器人抓放轨迹,使运行周期内跃度曲线变得连续,消除了系统的柔性冲击;梁香宁等人在Delta 机器人正逆运动学的基础上分析了其工作空间,陈统书等人则在MATLAB 里进行了仿真分析,并将工作空间以空间三维图形的形式直观地表示出来;王林军等人基于Matlab 和Adams 将门字形轨迹进行了仿真模拟,虽然得到了相对连续的运动数据,但是路径约束点处的导数不连续,因此主动臂在对应的这两个时刻受到冲击和振动。
本文在Solidworks 中建立模型,结合Matlab 和Adams 联合仿真,针对典型的圆角门形轨迹,以降低工作时的在转角路径点的冲基于Adams 的Delta 机器人路径规划设计与仿真文/胡睿 李宏胜击和振动,通过Matlab 工具完成计算和生成数据,并导入Adams 软件进行仿真和分析。

2007年1月农业机械学报第38卷第1期Delta 型并联运动激光切割机床的工作空间分析王 霄 韩亚锋 林跃强 刘会霞 高传玉 【摘要】 提出了一种基于Delt a 并联机构的新型激光切割机床。
建立了三自由度D elta 并联机构的反解方程和工作空间求解模型,分析了各支链子工作空间的几何形状及其内部出现空洞的条件,从而将工作空间解析归结为可达工作空间外部边界与内部空洞边界求解。
采用几何分析与数值迭代相结合的方法,探索了工作空间每一区域的边界,得到了机构工作空间的完整描述。
整个求解过程直观、简明,计算速度快。
关键词:激光切割机床 Delt a 并联机构 工作空间中图分类号:T G 485;T P242文献标识码:AWorkspace Analysis of a Laser Cutting Machine ToolBased on Delta Parallel StructureWang Xiao Han Yafeng Lin Yueqiang Liu Huix ia Gao Chuanyu(J iangsu University )AbstractA new laser cutting m anipulator based o n Delta parallel robot is proposed.Inv erse equations and even the inverse kinematics model of the three -deg ree -o f -freedom Delta parallel structure areestablished .T he geom etric shape of each subchain's w orkspace is analyzed and how the interior hole is fo rmed are discussed in the test,so the pr oblem of wo rkspace depends o n the solution of outside boundary and interior hole boundary of w ing the com bined m ethod betw een geom etric algo rithm and numerical iter ative algorithm ,the geom etric contour of each subchain's w orkspace is taken into account and the boundar y co nditions o f all the w or kspace r eg io n are discussed thoroughly.T hr oug h abo ve analy sis,the whole solution pr ocess is intuitio nistic and co ncise ,and the calculatio n speed is ev en faster .Key words Laser cutting m anipulator ,Delta parallel structure ,Workspace收稿日期:2005-09-02王 霄 江苏大学机械工程学院 副教授,212013 镇江市韩亚锋 江苏大学机械工程学院 硕士生林跃强 江苏大学机械工程学院 硕士生刘会霞 江苏大学机械工程学院 教授高传玉 江苏大学机械工程学院 教授 引言并联机床又称为虚拟轴机床,是一种基于并联机构原理并结合现代机器人技术和机床技术而产生的一种新型数控机床。

三自由度并联打磨机器人设计与仿真作者:何金哲孔繁强刘庆友张游周恒骥来源:《中国新技术新产品》2020年第10期摘; 要:该文根据空间三自由度并联机构结构稳定、逆解易得的特性,设计了一种空间三自由度的并联打磨机器人。
建立了机构运动方程,得到了动平台姿态与3条支链变形量的关系。
基于Adams软件对建立的三维模型进行仿真,并通过样机模拟得到机构的工作参数。
仿真和试验结果表明,这种打磨机器人能够完成空间曲面的打磨,该机构结构简单,控制方便,具有广泛的应用价值。
关键词:打磨机器人;空间三自由度并联机构;运动学逆解;Adams仿真中图分类号:TP242.2; ; ; ; ; 文献标志码:A0 引言并联机构具有串联机构不可比拟的独特优势,如承载能力强、误差小、自重负荷比小、动力性能好、控制容易等结构特性,并联机器结构可以大幅减少其零件数以及减少制造成本和库存成本,同时更加容易组装和模块化。
除此以外,并联机构具有运动学逆解求取容易的特性,很好地满足了打磨任务的要求。
基于以上优点,该文采用并联机构实现空间曲面的轨迹运动。
传统打磨机构主要针对XY平面维度上的应用,而空间曲面的打磨要求打磨机构在三维空间曲面内的灵活自如地运动(Z轴以及绕坐标轴的α和β方向的运动(平动、转动))。
1985年克拉维尔设计的Delta型并联机构[1]经过几十年的发展得到了广泛应用,经过分析发现Delta型并联机构很好地实现了三维空间的平动,但由于其动平台的姿态始终不变,因此无法满足需要。
1965年,德国Stewart[2]发明了六自由度并联机构,通过6个独立液压缸实现机构六自由度运动,可以很好地满足需求,但因为机构自由度的增加导致求解过程非常复杂,所以增加了控制的难度且大大增加了生产的成本。
3-RRR球面并联机构可以实现球面三自由度,且该类机构的运动学正反解都很简单,是一种应用很广泛的三维移动空间机构,Alige Eye[3-4]作为三自由度并联机器人中的一种,理论上的工作空间为完整球面,但经过验证发现,实物加工困难且对精度要求高,容易出现各类碰撞干涉。
三自由度机械手运动学的研究【摘要】机械手的运动学分析是研究的热门话题,通过获得机械手末端装置在空间中的姿态与位置的方法,对于机械手的设计和控制极为重要。
本文通过建立一种简易设计机械手的三维模型,简单介绍了D-H方法并对该法进行了简便运算方法的分析,再结合要设计的机械手模型确定了D-H参数后,通过对机械手关节处的特征矩阵进行求解机械手运动学的正解运算,最终得到了机械手末端的姿态,并结合实际情况对末端运动坐标进行了验证。
经验证,所确定的运动函数完全符合设计的需求,对现实中机械手的生产、控制、研发等提供了可靠的理论依据。
【关键词】机械手;机器人;自由度;D-H法;正运算。
Research of Imaging System Based on STM MCUWU Xiao-lei1 WANG Shu-kun2 LI Da-peng2(1.olleg JiLin Province Design and Research Institute Petrochemical Engineering,Changchun Jilin,130022,China;2.College of Mechanical and Electrical Engineering,Changchun University of Science and Technology,Changchun Jilin,130022,China)【Abstract】Manipulator kinematics analysis is the hot topic in the research.It is of extreme importance to design and control of the manipulator through this access to get the end of the manipulator the position and posture in the space.In this paper,through the establishment of a simple 3D model design,the D-H methods were simply introduced ,combining D-H parameters model,solving the manipulator kinematics positive solution,finally gets the end of the manipulator,s posture,and connecting with the actual situation of terminal motion coordinates . Determine the movement function completely accords with the demand of this design.Provides the reliable theory basis for the production,the control of the kinematics.【Key words】Manipulator;robot;Degree of freedom;D-H method;Forward kinematics.0 引言使用机械手对工件进行搬运,目前已经得到了大范围的推广,因此研究机器手的运动,从而更好的设计和控制机器手也十分重要。
Delta机器人运动优化的研究摘要:Delta机器人是一种具有高精度、高速度、高可靠性的平行机器人,在工业、医疗、军事等领域有着广泛的应用。
为了进一步提高Delta机器人的运动效率和精度,本文基于关键点规划和PID闭环控制理论,提出了一种Delta机器人运动优化方案。
在运动规划过程中,采用基于关键点的方法对机器人运动轨迹进行优化,避免了无效运动和重复计算;在运动控制方面,采用PID闭环控制算法对机器人状态进行实时控制,实现了快速响应和高精度的运动控制。
通过仿真实验,验证了Delta机器人运动优化方案的有效性和实用性,为提高机器人的实际运行效率和生产效益提供了有力的技术支持。
关键词:Delta机器人;运动优化;关键点规划;PID闭环控制;仿真实验正文:一、引言Delta机器人是一种平行机器人,具有轻量化、高刚度、高精度、高速度、高承载能力、高可靠性的特点,广泛应用于工业、医疗、军事等领域。
机器人的运动效率和精度是衡量机器人运行效率和生产效益的重要指标。
为了提高机器人的运动效率和精度,需要对机器人的运动规划和控制进行优化和改进。
二、Delta机器人运动规划Delta机器人的运动规划是指根据机器人的运动任务和工艺要求,确定机器人的运动轨迹和运动速度。
基于关键点的方法是一种有效的运动规划方法,它是通过确定机器人运动轨迹上的若干个关键点,来实现机器人运动轨迹的优化和控制。
1、关键点规划关键点是指机器人运动轨迹上的若干个特殊点,它们对机器人的运动轨迹和速度具有重要的影响作用。
基于关键点的方法是一种折中权衡的运动规划方法,它既考虑了机器人的运动效率和精度,又避免了无用运动和重复计算。
2、运动轨迹优化关键点规划可以实现机器人运动轨迹的优化和控制,避免了机器人的无效运动和重复计算。
通过建立机器人关键点与时间的映射关系,可以实现机器人的快速响应和高精度控制。
根据机器人的运动任务和工艺要求,可以通过逆运动学算法和轨迹生成算法,实现机器人运动轨迹的自动生成和优化。
Delta并联机器人的参数优化设计研究摘要:结构参数优化是并联机器人运动学设计的最终目标。
本文针对Delta机器人提出了一种结构参数优化设计方法。
首先对机构进行运动学分析得到局部灵活度的性能评价指标,其次将局部性能评价指标综合为全域性能指标,将尺度综合问题归结为一类参数优化问题。
该方法对这类以及其他并联机构的运动学设计理论有一定指导意义。
关键词:并联机器人参数优化工作空间一、前言Delta机器人是一种具有3个平动自由度的高速并联机器人,也是目前商业应用最成功的并联机器人之一,该并联机器人有较广阔的操作空间,适应多种应用场合。
例如:轻工业中的包装、pick-and-place操作;医学手术等。
机器人结构参数优化设计是一个综合性很强的问题,需要考虑各个方面的要求,包括工作空间、灵活性、负载能力、条件数和刚度等,以确保机器人操作性能趋向最优。
事实上雅克比矩阵条件数已被公认为误差分析以及运动灵巧性的衡量指标,据此本文以Delta机器人为研究对象,在运动学层面上提出一种可使全域综合操作性能最优的机器人结构参数优化设计研究方法,该方法以雅可比矩阵条件数为目标,采用数值方法对机构参数优化并将其应用到实例中,最后通过算例证实其有效性。
二、系统简介如图1所示,Delta机构由静平台、动平台、3根主动杆、3个平行四边形从动支链组成。
主动杆与静平台通过转动副相连接,从动杆一端通过2个自由度的转动副与主动杆相连,另一端通过球铰与动平台相连。
3个这样的平行四边形从动支链保证了动平台只能有3个方向的平动自由度。
在静平台和动平台上分别建立坐标系oxyz、o'x'y'z'如图2所示。
点o'的位矢r=[xyz]T在oxyz可表示为r=bi-ai+l1ui+l2wi (1)式中bi,ai――节点Bi和Ai分别在oxyz和o'x'y'z'中的位置向量;l1,l2,――主动臂和从动臂长;ui,wi,――主动臂和从动臂的单位矢量;rb,ra,――静、动平台半径。
三自由度并联分拣机器人的动力学建模与仿真
崔冰艳;桂小庚;曾鸿泰;李贺
【期刊名称】《包装工程》
【年(卷),期】2024(45)3
【摘要】目的针对自动化生产线上分拣机器人的动力可控性问题,提出一种2UU-UPU三自由度并联分拣机器人,以提高分拣的精度可控性。
方法分析该机器人的机构自由度,以及各参数之间的关系,基于闭环矢量法建立并联机构的运动学逆解模型;利用拉格朗日动力学方程推导该机器人的动力学表达式,并进行数值计算,采用Matlab Simulink和Adams进行动力学联合仿真,对理论值和仿真值进行误差分析。
结果揭示了该机器人动平台的运动规律,得到了驱动力矩曲线,理论值与仿真值的误差较小,3个驱动力矩的最大误差分别为0.379%、0.283%、0.146%。
结论通过验证可知,该机构具有较好的动力学特性,这为后续电机的选型和精准控制奠定了基础。
【总页数】8页(P218-225)
【作者】崔冰艳;桂小庚;曾鸿泰;李贺
【作者单位】华北理工大学机械工程学院
【正文语种】中文
【中图分类】TH112
【相关文献】
1.三自由度Delta并联机器人动力学建模及仿真分析
2.三自由度并联机器人运动学和动力学建模与仿真
3.基于凯恩方法的三自由度Delta并联机器人动力学建模
4.三自由度并联机器人动力学及仿真
5.三自由度并联机器人刚柔耦合动力学建模
因版权原因,仅展示原文概要,查看原文内容请购买。