机器人操作机工作空间共34页
- 格式:ppt
- 大小:1.34 MB
- 文档页数:34
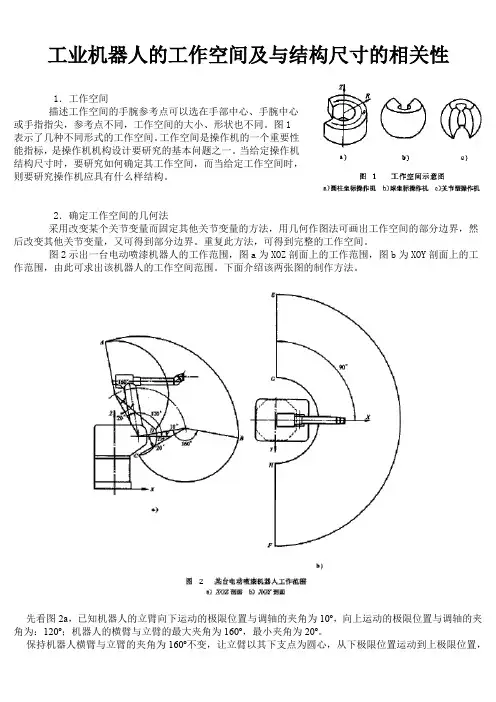
工业机器人的工作空间及与结构尺寸的相关性1.工作空间描述工作空间的手腕参考点可以选在手部中心、手腕中心或手指指尖,参考点不同,工作空间的大小、形状也不同。
图1表示了几种不同形式的工作空间。
工作空间是操作机的一个重要性能指标,是操作机机构设计要研究的基本问题之一。
当给定操作机结构尺寸时,要研究如何确定其工作空间,而当给定工作空间时,则要研究操作机应具有什么样结构。
2.确定工作空间的几何法采用改变某个关节变量而固定其他关节变量的方法,用几何作图法可画出工作空间的部分边界,然后改变其他关节变量,又可得到部分边界。
重复此方法,可得到完整的工作空间。
图2示出一台电动喷漆机器人的工作范围,图a为XOZ剖面上的工作范围,图b为XOY剖面上的工作范围,由此可求出该机器人的工作空间范围。
下面介绍该两张图的制作方法。
先看图2a,已知机器人的立臂向下运动的极限位置与调轴的夹角为10º,向上运动的极限位置与调轴的夹角为:120º;机器人的横臂与立臂的最大夹角为160º,最小夹角为20º。
保持机器人横臂与立臂的夹角为160º不变,让立臂以其下支点为圆心,从下极限位置运动到上极限位置,可画出AB段弧;再让机器人的立臂位于下极限位置保持不动,让横臂从与立臂的最大夹角运动到最小夹角,画出BC段弧;则弧ABC为机器人的未端在XOZ剖面上所能够达到的工作范围的最外部的边界。
再让机器人的立臂位于上极限位置保持不动,让横臂从与立臂的最大夹角运动到最小夹角,画出AD段弧;然后让横臂保持与立臂的最小角,让立臂以其下支点为圆心从其上极限位置运动到下极限位置,画出DC段弧;则弧ADC为机器人的未端在XOZ剖面上所能够达到的工作范围的最内部的边界。
由弧ABCDA所包络的空间中的任何一点,该机器人都可达到,但是位于该空间外部的点,该机器人均不可达到。
再看图2b,已知机器人转塔的最大转角为180º,即相对于调轴为±90º。
工业机器人的基本参数和性能指标工业机器人的基本参数和性能指标表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。
(1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。
工作空间的性状和大小反映了机器人工作能力的大小。
理解机器人的工作空间时,要注意以下几点:1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。
因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。
2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。
这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。
此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。
3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。
空腔是指在工作空间内臂端不能达到的完全封闭空间。
而空洞是指在沿转轴周围全长上臂端都不能达到的空间。
(2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。
工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。
机器人的自由度数目越多,功能就越强。
日前工业机器人通常具有4—6个自由度。
当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。
工业机器人的工作空间规划教程工业机器人在现代制造业中扮演着重要的角色,它们能够提高生产效率、提升产品质量,甚至还能处理一些危险或重复性工作。
然而,为了确保机器人在工作中能够安全高效地操作,工作空间的规划是至关重要的。
本文将介绍工业机器人的工作空间规划教程,以帮助您合理规划机器人的工作环境。
一、确定机器人的工作区域首先,需要确定机器人的工作区域。
工作区域要足够大,以容纳机器人的移动和操作,并确保不会与其他设备或人员发生碰撞。
确定机器人的工作区域时,需要考虑以下因素:1. 机器人的运动范围:根据机器人的尺寸和工作任务,确定机器人需要的运动范围。
机器人通常具有可编程的轨迹和工作空间,可以根据具体需求进行调整。
2. 安全间距:要确保机器人的运动不会造成危险,应在机器人工作区域周围预留一定的安全间距,以防止碰撞事故的发生。
3. 操作人员的工作区域:机器人工作区域应与操作人员的工作区域相分离,并设置明确的安全标识。
尽量将操作人员与机器人的工作区域隔离开,以减少事故的发生。
二、安全措施的考虑在工业机器人的工作空间规划中,安全措施是必不可少的一部分。
以下是一些常见的安全措施:1. 安全围栏:对于高风险的工作环境,可以设置安全围栏来限制机器人的行动范围。
安全围栏应该具有足够的强度和稳定性,以保护工作人员免受机器人的伤害。
2. 机器人的安全装置:机器人通常配备有安全装置,如机器人手臂上的碰撞传感器或视觉传感器。
这些安全装置可以监测周围环境,并在检测到障碍物或人员时停止机器人的运动。
3. 安全标识和警示灯:在机器人的工作区域周围设置明显的安全标识和警示灯,以提醒工作人员注意机器人的运动和操作。
4. 培训和教育:在规划工业机器人的工作空间时,操作人员的培训和教育也是重要的。
他们应该了解与机器人操作相关的安全规范和标准,并掌握正确的操作方法。
三、考虑机器人与其他设备的协调在工业生产线上,机器人往往需要与其他设备和机械装置进行协调工作。
工业机器人的基本参数和性能指标工业机器人的基本参数和性能指标表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。
(1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。
工作空间的性状和大小反映了机器人工作能力的大小。
理解机器人的工作空间时,要注意以下几点:1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。
因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。
2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。
这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。
此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。
3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。
空腔是指在工作空间内臂端不能达到的完全封闭空间。
而空洞是指在沿转轴周围全长上臂端都不能达到的空间(2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。
工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。
机器人的自由度数目越多,功能就越强。
日前工业机器人通常具有4—6个自由度。
当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。

机器人基础操作手册(Suzuki)*本手册仅针对冲压车间(使用附加选项StampWare)机器人的常用操作进行说明,用户首先应该接受过ABB机器人基础培训。
* 本手册部分内容参考《操作员手册》,如需了解详情,请参阅《操作员手册》。
* 本手册版权所有2009 ABB Group,保留所有权利。
目录1.1示教器界面 (3)1.2输入输入 (4)1.2.1 概述 (4)1.2.2 I/O 单元 (5)1.2.3 ”swArmBoard” (6)1.2.4 “swPLCBoard” (6)1.3手动操纵 (6)1.3.1机械单元 (7)1.3.2 动作模式 (8)1.3.3 坐标系 (9)1.3.4 操作锁定 (9)1.3.5 增量 (10)1.4自动生产窗口 (10)1.5程序编辑器 (11)1.5.1 初始化 Initialization (11)1.5.2 示教 Home点,Access点 (13)1.6备份与恢复 (14)1.6.1 备份当前系统 (15)1.7校准 (16)1.7.1 更新1~6轴转数计数器 (16)1.7.2 校准7轴 (18)1.8控制面板 (18)1.8.1 概述 (18)1.8.2 外观 (19)1.8.3 I/O (19)1.8.4 语言 (20)1.8.5 ProgKey (20)1.9资源管理器 (22)1.10C ELL HMI (23)1.10.1概述 (23)1.10.2 “生产线命令” 界面 (24)1.10.3 “机器人命令” 界面 (26)1.10.4 “安全”界面 (27)1.10.5 “生产” 界面 (29)1.10.5a Interpress“单元控制” (29)1.10.5b “真空控制” 界面 (31)1.11W IZARD (31)1.11.1概述 (31)1.11.2定义工具 (33)1.11.3定义零件 (34)1.11.4 零件概要 (35)1.11.5 零件参数设定.......................................................................................................37 1.11.6零件轨迹设置.......................................................................................................39 1.11.6 复制新工具/零件..................................................................................................44 1.11.7 自动更换端拾器(ATC )....................................................................................45 2优化..................................................................................................................................47 2.1 “下料机器人”提前取料...............................................................................................47 2.2 “下料机器人”提前发送上料授权.................................................................................47 2.3 “上料机器人”提前启动压力机..................................................................................49 3 机器人参数.. (50)1.1示教器界面FlexPendant 中文名为示教器,是机器人的操作界面。
