基于点云数据的曲面重建算法比较研究
- 格式:pdf
- 大小:1.46 MB
- 文档页数:5

点云转换七参数和曲面拟合用户希望了解如何将点云转换为七参数,并进行曲面拟合。
在本文中,我们将一步一步回答这两个问题。
点云是由大量的离散点构成的三维数据集合。
通常情况下,点云数据来自于激光扫描、三维相机或其他三维感知设备。
点云具有广泛的应用领域,如地质勘探、建筑设计、机器人导航等。
然而,点云数据的处理和分析需要进行坐标系的转换,并进行曲面拟合以提取有用的信息。
第一部分:点云转换七参数1. 什么是点云转换?点云转换是将点云数据从一个坐标系转换到另一个坐标系的过程。
这个过程通常涉及到确定两个坐标系之间的关系,并通过一组转换参数将点云数据从原始坐标系转换到目标坐标系。
2. 七参数是什么?七参数是一组描述两个坐标系之间的平移、旋转和尺度关系的参数。
这组参数包括三个平移参数(Tx、Ty、Tz)、三个旋转参数(Rx、Ry、Rz)和一个尺度参数(S)。
3. 如何进行点云转换七参数?进行点云转换七参数的一种常用方法是通过进行点云配准。
点云配准是通过寻找两个点云之间的最佳匹配,确定其之间的坐标转换关系。
这可以通过使用ICP(Iterative Closest Point)算法或其他配准方法来实现。
ICP算法是一种迭代的优化算法,通过最小化两个点云之间的距离来找到最佳的匹配关系。
在每一次迭代中,ICP算法计算点云之间的最佳旋转和平移,然后将点云进行变换。
这个过程一直重复直到达到收敛条件。
在ICP算法的基础上,通过迭代计算出的最佳变换参数可以得到七参数的估计值。
这些参数可以应用于点云数据,使得点云从原始坐标系转换到目标坐标系。
第二部分:曲面拟合1. 什么是曲面拟合?曲面拟合是一种数学方法,用于通过离散点云数据拟合出一个光滑的曲面模型。
曲面拟合可以得到连续的曲面函数,以便于进一步的分析和应用。
2. 如何进行曲面拟合?常见的曲面拟合方法包括最小二乘法、B样条曲面、Bezier曲面等。
在这里,我们将介绍最小二乘法进行曲面拟合。

表面重建算法概述表面重建算法是计算机图形学中的一个重要研究领域,其主要目的是从点云数据中生成连续、光滑的曲面模型。
表面重建算法应用广泛,如三维扫描、医学成像、地形建模等领域。
本文将介绍表面重建算法的基本原理、分类以及常用算法。
基本原理表面重建算法的基本原理是从离散的点云数据中生成连续、光滑的曲面模型。
点云数据通常由三维扫描仪或激光雷达等设备获取。
对于一个给定的点云,表面重建算法需要确定每个点在曲面上的位置和法向量。
分类表面重建算法可以分为两类:基于网格和基于隐式函数。
1. 基于网格基于网格的表面重建算法将点云转换为一个三角网格,然后通过对网格进行平滑处理来生成曲面模型。
其中最常用的方法是Poisson重构算法。
Poisson重构算法基于Poisson方程,该方程描述了曲面上任意一点处梯度向量与曲面法向量之间的关系。
该算法首先计算每个点在曲面上的法向量,然后通过对点云进行重采样得到一个规则的网格,最后利用Poisson方程求解得到曲面模型。
2. 基于隐式函数基于隐式函数的表面重建算法将点云转换为一个隐式函数,然后通过等值面提取算法生成曲面模型。
其中最常用的方法是Moving Least Squares (MLS)算法。
MLS算法首先对点云进行平滑处理,然后对每个点构建一个局部加权多项式函数。
该函数表示了该点附近的曲面形状,然后通过等值面提取算法生成曲面模型。
常用算法1. Marching Cubes算法Marching Cubes算法是一种基于网格的表面重建算法。
该算法将三维空间划分为一系列小立方体,并在每个立方体中确定等值面的位置和拓扑结构。
最终将所有立方体中的等值面拼接起来形成曲面模型。
2. Poisson重构算法Poisson重构算法是一种基于网格的表面重建算法。
该算法首先计算每个点在曲面上的法向量,然后通过对点云进行重采样得到一个规则的网格,最后利用Poisson方程求解得到曲面模型。
3. MLS算法MLS算法是一种基于隐式函数的表面重建算法。

激光雷达点云处理算法研究激光雷达是一种重要的感知设备,它可以精确地获取目标物体的三维点云数据。
激光雷达点云处理算法是将这些点云数据转化为可供机器理解和利用的信息的过程。
在现代自动驾驶、机器人导航和三维重建等应用中,激光雷达点云处理算法发挥着重要的作用。
一、点云滤波激光雷达采集到的点云数据中常常存在噪声和离群点,因此需要进行点云滤波以提高数据的质量。
常见的点云滤波算法包括统计滤波、半径滤波和高斯滤波等。
统计滤波是通过计算点云数据的统计特征,如平均值、方差和标准差来滤除异常点。
半径滤波是根据指定的邻域半径,将每个点的邻域中的点加权求和,并对其进行平均化处理。
高斯滤波则是采用加权平均的方式,根据点与邻域中其他点的相对距离进行加权求和。
通过这些滤波算法的应用,可以有效去除点云数据中的噪声和离群点,得到更准确的点云信息。
二、点云分割点云分割是将点云数据划分成不同的部分或对象的过程。
这对于目标检测、车道线识别和三维重建等应用非常重要。
常见的点云分割算法包括基于几何特征的分割和基于深度学习的分割。
基于几何特征的分割算法通常通过计算点云数据的法向量、曲率和法向量变化率等几何属性来进行分割。
例如,基于曲率阈值的算法可以通过设置曲率阈值来划分平面和非平面点。
基于深度学习的分割算法则是利用深度卷积神经网络对点云数据进行特征提取和分类。
通过训练网络模型,可以实现更精确和准确的点云分割。
三、点云配准点云配准是将多个采集到的点云数据进行对齐和融合的过程。
这对于建立三维模型和实现多传感器融合等应用至关重要。
常见的点云配准算法包括基于特征匹配的配准和基于优化的配准。
基于特征匹配的配准算法通过提取点云数据的特征描述子,如SIFT和FPFH等,来进行点云的匹配和对齐。
通过找到匹配的特征点对,可以计算出点云的刚体变换矩阵,实现点云数据的对齐和融合。
基于优化的配准算法则是通过最小化点云之间的距离或误差,来求解最佳的变换矩阵。
例如,ICP(Iterative Closest Point)算法通过迭代寻找最小化欧氏距离的变换矩阵,实现点云的配准和对齐。
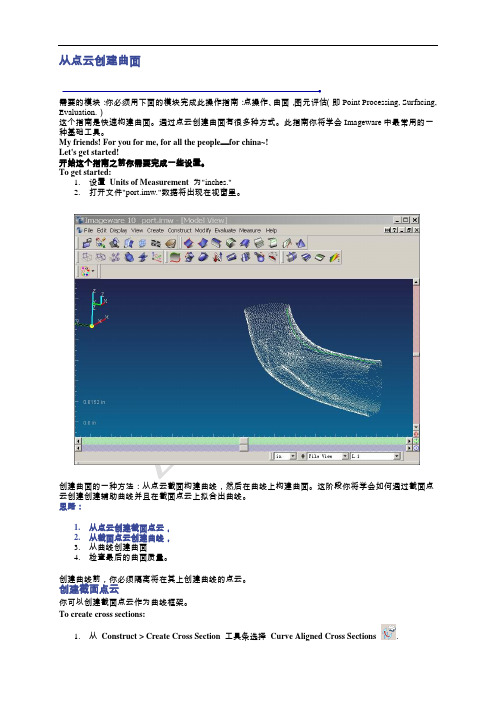
从点云创建曲面需要的模块:你必须用下面的模块完成此操作指南:点操作、曲面,图元评估(即Point Processing, Surfacing, Evaluation.)这个指南是快速构建曲面。
通过点云创建曲面有很多种方式。
此指南你将学会Imageware中最常用的一种基础工具。
My friends! For you for me, for all the people—for china~!Let's get started!开始这个指南之前你需要完成一些设置。
To get started:1.设置Units of Measurement为"inches."2.打开文件"port.imw."数据将出现在视窗里。
创建曲面的一种方法:从点云截面构建曲线,然后在曲线上构建曲面。
这阶段你将学会如何通过截面点云创建创建辅助曲线并且在截面点云上拟合出曲线。
思路:1.从点云创建截面点云,2.从截面点云创建曲线,3.从曲线创建曲面4.检查最后的曲面质量。
创建曲线前,你必须隔离将在其上创建曲线的点云。
创建截面点云你可以创建截面点云作为曲线框架。
To create cross sections:1.从Construct > Create Cross Section工具条选择Curve Aligned Cross Sections.确信数据显示在最佳视角。
本人推荐使用对齐视图到点云:View|Align View To|Cloud. 3. 指定截面类型为 View Aligned (使截面垂直于当前视图,而截面中心在曲线上) 4. 设置截面数为20.(将可能得到20条截面点云)5. 设置截面宽度为 1.65. 接受默认的neighborhood size.(相邻点间的尺寸)6. 点击 Apply 创建了新点云CrvAlignSectCld.1 – 曲线"Seam"2 – 从点云创建的截面点云 "port" 和曲线 "seam"从截面点云创建曲线从点云创建曲线有许多方法,这里将使用Uniform Curve 功能。

测绘技术中点云数据的获取与处理方法导语:随着科技的不断进步,测绘技术在各个领域中发挥着越来越重要的作用。
其中,点云数据的获取与处理是测绘技术中的一项关键工作。
本文将探讨点云数据的获取方法以及处理方法,带您了解测绘技术中点云数据的应用与实践。
一、点云数据的获取方法1.激光扫描测量法激光扫描测量法是一种高精度、高效率的点云数据获取方法。
通过使用激光测距仪,将激光束发射到被测物体表面,并通过接收器接收反射回来的激光束,从而得到点云数据。
这种方法具有非接触、无损伤、高精度的优点,广泛应用于三维建模、地质勘探等领域。
2.摄影测量法摄影测量法是利用摄影测量仪器通过拍摄被测物体的多个角度和位置,从而测量得到点云数据的方法。
通过对不同角度的影像进行匹配和配准,可以得到三维空间中的点云数据。
这种方法适用于大范围的测量,如城市规划、土地利用等领域。
3.结构光测量法结构光测量法是一种通过投射特殊光源模式到被测物体表面,通过相机来捕捉光影变化以获取点云数据的方法。
这种方法具有快速、准确的特点,广泛应用于工业检测、机器人导航等领域。
二、点云数据的处理方法1.点云数据的滤波点云数据通常包含了很多无效或噪声点,需要进行滤波处理。
常用的滤波方法有统计滤波、半径滤波和法线滤波等。
统计滤波通过计算每个点的邻居点的统计信息来去除噪声点;半径滤波通过计算每个点在给定半径内的平均值或中值来去除无效点;法线滤波则通过计算每个点的法线向量来去除异常点。
2.点云数据的配准配准是将多个采集到的点云数据融合成一个整体的过程。
常用的配准方法有ICP(Iterative Closest Point)算法和特征点匹配法等。
ICP算法通过不断迭代优化点云之间的匹配关系,使其最小化距离误差来实现点云配准;特征点匹配法则通过在点云中提取特征点,通过特征点之间的匹配来实现点云配准。
3.点云数据的重建与分析点云数据的重建与分析是将点云数据转化为可视化模型或进行进一步分析的过程。

三维点云数据处理的技术探究随着三维数据得到和应用领域的迅速进步,三维点云数据处理技术在各个领域中扮演着重要的角色。
三维点云数据是一种由大量点构成的数据结构,可用于表示现实世界中物体表面的三维几何信息。
它广泛应用于计算机图形学、计算机视觉、室内导航、机器人感知等领域。
本文将探讨现状和将来进步方向。
一、三维点云数据得到技术1. 激光雷达扫描技术:激光雷达通过发射激光束,利用接收到的反射光信号来计算物体的距离和位置信息。
激光雷达扫描技术具有高精度、高区分率和无需受环境光影响等优点,因而成为得到三维点云数据的主要工具之一。
2. 立体视觉技术:立体视觉技术基于双目或多目摄像机的成像原理,通过计算图像上的像素匹配干系,得到物体的深度信息。
立体视觉技术可以实现非接触式的三维点云数据得到,且适用于更广泛的场景。
二、三维点云数据处理技术1. 数据预处理:三维点云数据通常会受到噪声和不完整性的影响,需要进行预处理以提高数据质量。
常见的预处理方法包括滤波、去噪和补洞等。
滤波技术依据点云数据的统计特性对数据进行平滑处理,提高数据的可靠性和稳定性。
常用的滤波方法有高斯滤波、中值滤波和双边滤波等。
去噪技术通过分析点云数据的特征进行噪声的检测和消除,以缩减噪声对点云分析的干扰。
去噪方法包括统计滤波、曲面平滑和小波变换等。
补洞技术用于处理由于成像或采集过程中引起的点云数据缺失问题。
补洞方法可通过插值、重建和拟合等方式,将缺失的区域填补完整。
2. 特征提取与描述:在点云数据处理中,特征提取和描述是重要的步骤。
能够准确描述物体外形和局部特征的点云特征对于分类、识别和匹配等任务具有关键意义。
基于局部特征的描述方法可以提取点云数据中的表面法向、曲率和颜色等特征,如法线直方图描述子、SHOT描述子和PFH描述子等。
通过对局部特征进行匹配和聚类,可以实现对复杂点云数据的分析和处理。
基于全局特征的描述方法利用整个点云数据的几何外形进行描述,并可实现点云数据的重建和分类等任务。
曲面重组技术
曲面重组技术是一种在数字建模中常见的技术,主要用于从离散的三维点云数据中重建连续的曲面。
该技术常用于如3D扫描、计算机视觉、机器人技术等领域,能够帮助从复杂的三维数据中提取有用信息。
一、曲面重组技术在哪些领域有应用?
曲面重组技术广泛应用于多个领域。
在计算机图形学中,它用于从三维扫描器获取的粗糙、离散的点云数据中重建精细、连续的三维模型。
在计算机视觉中,曲面重组技术可以帮助从二维图像中提取三维信息,以理解物体的形状和结构。
在机器人技术中,曲面重组可以帮助机器人理解其周围的环境,从而实现自主导航或者物体操控。
二、曲面重组技术的主要步骤是什么?
曲面重组技术的主要步骤包括数据预处理、曲面重建和曲面优化。
数据预处理包括去噪、滤波等,以提高点云数据的质量。
曲面重建是通过各种算法(如Delaunay三角化、Voronoi图、八叉树等)把处理后的点云数据转化为连续的曲面。
曲面优化则进一步提升了重建曲面的精度和质量,包括平滑处理、细分处理等。
三、曲面重组技术面临哪些挑战?
尽管曲面重组技术已经取得了显著的进步,但仍然面临一些挑战。
首先,对于复杂或者非常规形状的物体,使用当前的技术可能无法获取满意的重建效果。
其次,大规模的点云数据处理需要大量的计算资源,这在一定程度上限制了曲面重组技术的应用。
最后,点云数据的质量直接影响曲面重组的结果,因此需要高效的数据预处理技术来提高数据质量。
Geomatics Science and Technology 测绘科学技术, 2020, 8(2), 88-95Published Online April 2020 in Hans. /journal/gsthttps:///10.12677/gst.2020.82011A Fast Surface Reconstruction AlgorithmConsidering the Curvature of Point CloudRuohan Liu, Bingxuan Guo*State Key Laboratory of Information Engineering in Surveying Mapping and Remote Sensing, Wuhan University, Wuhan HubeiReceived: Apr. 9th, 2020; accepted: Apr. 23rd, 2020; published: Apr. 30th, 2020AbstractWe describe a fast surface reconstruction algorithm considering the curvature of point cloud froma set of merged range scans. Our key contribution is improving the efficiency of the algorithm bydeleting part of visual information. First, Delaunay edges are added to the point cloud to construct Delaunay structure. Then, part of visual information is deleted base of curvature of point cloud, and a graph-cuts problem is established based on the remaining visual information. Finally, a sur-face model is obtained by solving the graph-cuts problem. We tested our method on several pub-licly available sets of range scans. The experimental results show that the method can efficiently reconstruct high-quality surface model with rich details and high integrity.KeywordsSurface Reconstruction, Delaunay, Visual Information, Tetrahedron, Ray顾及点云曲率的快速点云表面模型重建算法刘若晗,郭丙轩*武汉大学测绘遥感信息工程国家重点实验室,湖北武汉收稿日期:2020年4月9日;录用日期:2020年4月23日;发布日期:2020年4月30日摘要针对现行点云表面模型重建算法的效率问题,提出一种顾及点云曲率的快速点云表面模型重建算法。
基于曲率的点云数据简化方法摘要:作为一种非接触型设备,它可以快速高精度的采集部分曲面数据,它变成最常用的设备,对于刻画部分曲面数据。
然而,它产生大量的点云数据,为了减少计算时间和降低内存需求必须对这些点云数据进行精简。
针对以往点云数据精简方法的局限性,本文提出一种基于曲率的新的精简方法。
它包括搜索K个近临为了重建数据拓扑结构,计算和调整切平面法线,通过使用抛物线拟合的方法来估计曲率,并且给出数据精简原则。
实验结果表明新的方法明显的减少了点云的数量,而且完好的保留了物体的几何特征。
关键字:数据精简、K个近邻、逆向工程、曲率1简介在逆向工程中,一种非接触式测量设备可以非常快速、高精度的扫描部件,它变成刻画部分曲面数据的主流设备。
然而,获取的数据是稠密无序的,以至于难于直接给表面模型着色。
这些数据需要大量的存储空间、并且大大的增加了计算的时间。
因此,如何大量的精简点云数据的数量,并完美的保留数据的几何特征是点云数据精简的关键。
两个主要的趋势可以被观测到在这个实验尝试中。
一个是格网简化。
正如一个一般的缺点,它首先必须建立并维持网格数据结构,然后根据一些原则来减少数据,这个过程是很复杂和花费时间的。
另一种是基于点的精简方法,这种方法减少点云数据通过使用部分几何信息。
在文献3中,作者使用包围盒去构建分割面来将数据分割成线结构,然后根据弦角偏差法精简点云数据。
在文献4中,作者使用基于局部曲面的点的法线值,这个局部曲面来自使用法线标准差生成的不规则三角网。
数据精简是通过在每个网格中选择一个代表性的点,删除其他的点来完成的。
基于曲率减少点云是另一种基于点精简的方法。
在参考文献5中,作者根据计算出来的每个点的曲率将点进行划分,并且不同的区间设立不同的误差值ξ,然后保留误差值大于ξ的点。
然而,这种方法并没有明确指出每个误差值ξ的标准值。
在参考文献6中,作者将点云划分成两种类型高曲率点和低曲率点通过使用阈值T,那些低曲率的点根据需要被提取,而那些高曲率的点是根据预先设置的比分比被提取的,阈值T的选择主要是根据经验。
医学图像处理中的三维重建方法与技巧研究概述:三维重建是医学图像处理中一个重要领域,它在提供更准确诊断、制定治疗计划以及研究生物组织结构方面起着关键作用。
本文将介绍医学图像处理中的三维重建方法与技巧的研究进展。
一、基于体素的三维重建方法1. 体素表示法体素是三维空间中的一个离散的点,体素表示法是最常用的三维重建方法之一。
它将医学图像分成小的立方体(体素),通过计算每个体素的属性值来重建物体的三维形状。
2. 体素化算法体素化算法主要分为体素生成和体素优化两个步骤。
体素生成通过确定边界点和连接方法来产生体素网格。
而体素优化则通过平滑和去除无用的体素等技巧提高重建结果的质量。
3. 体素投影重建体素投影重建是将医学图像转换为体素表示,从而实现三维重建的一种方法。
它基于医学图像的切片数据,通过将每个切片映射到体素空间中,从而构建三维模型。
二、基于曲面的三维重建方法1. 计算机辅助设计技术计算机辅助设计技术可以在医学图像上进行操作,通过选择合适的曲面模型来实现三维重建。
这种方法通常使用有限元或有限差分等技术来对曲面进行建模和优化。
2. 曲面重建算法曲面重建算法的核心是从离散的点云数据中重建出光滑曲面。
常见的曲面重建算法包括Marching Cubes、Poisson等。
这些算法通过使用点云的邻域信息来估计曲面法线,并以此构建更完整的曲面模型。
三、多模态图像融合技术在三维重建中的应用1. 多模态匹配多模态匹配是将不同模态的医学图像进行配准和融合的技术,为三维重建提供更全面和准确的信息。
常用的多模态匹配方法包括基于特征点的方法、基于区域的方法等。
2. 空间变换技术空间变换技术可以将不同模态的医学图像对齐到统一的坐标系中,从而实现图像融合和三维重建。
常用的空间变换技术包括刚体变换、仿射变换等。
四、三维重建的应用领域1. 医学诊断与治疗三维重建技术在医学诊断中起到关键作用。
医生可以通过三维重建的可视化结果更准确地观察病灶位置、形状、大小等信息,从而制定更精确的治疗计划。