楼宇的iBeacon室内定位技术
- 格式:pdf
- 大小:137.90 KB
- 文档页数:3
基于ibeacon的盲人建筑物内定位与导航作者:吴文卿来源:《课程教育研究》2017年第22期【摘要】国家统计局网站公布:中国是全世界盲人最多的国家之一,眼部疾病在中国也是一个主要的公共卫生问题。
中国约有盲人600-700万,占世界盲人总数的18%,另有双眼低视力患者1200万。
我国盲人数量早已超过诸如丹麦、芬兰、挪威等国家的人口数。
盲人的出行问题是关系到盲人生活质量的重要因素。
如今,广泛普及的智能手机与导航软件极大的缓解了盲人出门在外的定位与导航问题。
但是,现今导航软件、设备的使用场景都局限在室外,进入室内后无法定位与导航。
室内建筑中大量使用的标识以及平面图为普通人提供了极大的便利,使得人们可以在不熟悉的建筑中快速通往目标位置。
对于盲人以及更广大的低视力人群,进入陌生室内环境、建筑将寸步难行。
因此,本课题的目的在于设计一套建筑物内定位与导航的解决方案,填补盲人出行障碍的“最后100米”,是盲人进入建筑物后能准确找到餐厅、洗手间、会议室、商铺、教室、图书室等位置。
【关键词】ibeacon 导航定位盲人导航【中图分类号】G64 【文献标识码】A 【文章编号】2095-3089(2017)22-0222-03一、研究背景室内导航技术是近年来的热点领域,主要有WIFI定位、ibeacon定位、RFID定位、超声波定位、激光定位、移动通讯网定位等。
(一)ibeacon技术ibeacon是苹果公司2013年9月发布的使用于移动设备的通讯协议。
使用低功耗蓝牙BLE 技术进行广播信号,ibeacon向周围的设备发送自己特有的ID。
ID可以包括名字,UUID,信号强度RSSI。
(二)其他技术各定位技术方向对比见表1。
在上述技术方向中,激光定位没有避障能力,如果场景中有行人遮住了发射源,直接影响到定位,且激光会对正常视力人群产生一定伤害、存在光污染问题。
超声波定位虽然比激光定位的安全性好,但避障能力仍然很差,当受到其他行人的遮蔽时,导航效果会很差。
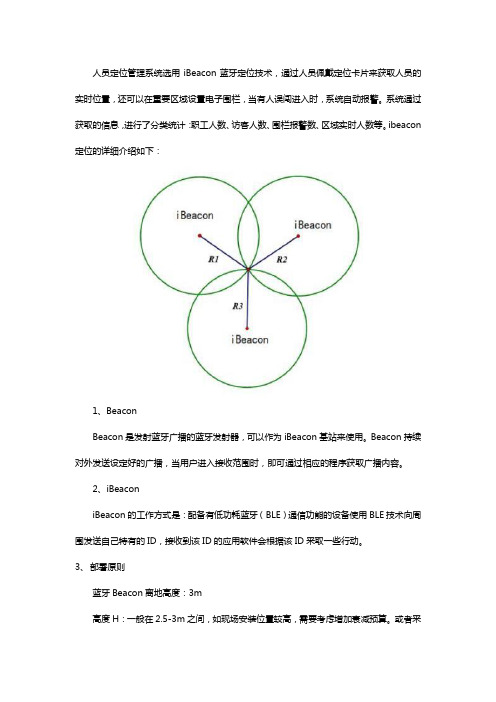
人员定位管理系统选用iBeacon蓝牙定位技术,通过人员佩戴定位卡片来获取人员的实时位置,还可以在重要区域设置电子围栏,当有人误闯进入时,系统自动报警。
系统通过获取的信息,进行了分类统计:职工人数、访客人数、围栏报警数、区域实时人数等。
ibeacon 定位的详细介绍如下:
1、Beacon
Beacon是发射蓝牙广播的蓝牙发射器,可以作为iBeacon基站来使用。
Beacon持续对外发送设定好的广播,当用户进入接收范围时,即可通过相应的程序获取广播内容。
2、iBeacon
iBeacon的工作方式是:配备有低功耗蓝牙(BLE)通信功能的设备使用BLE技术向周围发送自己特有的ID,接收到该ID的应用软件会根据该ID采取一些行动。
3、部署原则
蓝牙Beacon离地高度:3m
高度H:一般在2.5-3m之间,如现场安装位置较高,需要考虑增加衰减预算。
或者采
用地面、墙面部署,保证高度在3m内。
蓝牙Beacon水平间距:4-8m
一维定位场景:适合隔离度过高的过道,理论上只需要按序列部署一列间距4-8m的Beacon。
一般定位场景(开放区域):蓝牙Beacon呈三角均匀部署,需要3个或3个以上的蓝牙Beacon。
互相间距4-8m。
使用IBeacon技术的系统进一步加强了企业生产区域人员管控,分类统计出入生产区域企业人员、外来人员信息,精确显示生产区域内在线人员动态,第一时间掌握企业应急状态时涉险人员情况,提高应急救援效率,杜绝未经培训、未经批准人员进入生产区域,全面提升企业风险管控能力和精细化安全管理水平。
iBeacon技术在室内位置综合信息服务中的应用摘要地理位置是人的行为活动的重要基础之一,而室内又是人每天活动时间最长的处所,只要将室内位置、用户数据或用户感兴趣的信息和服务相结合,那么,室内位置综合信息服务必定有非常广阔的应用前景。
室内位置综合信息服务必将成为移动互联时代的最为重要的入口之一。
关键词iBeacon;室内位置;综合信息引言室内位置综合信息服务就是在商场里为消费者提供导购、导航、引流等综合信息服务。
室内位置综合信息服务系统会实时准确地告诉你:你目前在哪个楼层的哪个位置?附近有哪些商家商品在打折?这商场内有什么品牌?你的车放在停车场什么位置?大型商场里面最近的餐馆在哪里?精确引导消费者查找咨询台、服务中心、母婴室、洗手间、安全出口、电梯位置等等。
1 室内定位技术现状室内位置综合信息服务技术是基于WiFi、Zigbee、RFID、蓝牙或超声波等无线信号技术,通过测距或定位算法等手段实现室内目标的精确定位及服务的综合性技术,在商业应用、公共安全和医疗卫生等许多领域有着广泛的需求与应用。
然而室内的复杂环境和人身遮挡等影响因素对室内定位的精度提出了严峻的挑战,同时,受硬件开销和部署成本的影响,基于各种无线信号的室内定位系统在应用规模上也受到很大的限制,这也使得室内定位和服务技术成为当前无线定位研究的热点。
目前,大部分商场面积大,环境复杂,消费者难以寻找目标商家;消费者难以获知当前地点准确信息;地下有多个大型停车场,多个出入口,消费者消费回来找车困难等等问题。
要解决这些大商场普遍存在的痛点,商场迫切需要为消费者提供室内位置综合信息服务。
2 iBeacon技术特点及优势[1]室内定位面临的技术挑战,主要包括定位精度、抗干扰性、传输距离等。
同时,室内定位又需要成本低、功耗小、覆盖度广、灵活性高,以及可以接受的精度要求等。
目前的室内定位技术,主要包括几种:RFID、超声波、蓝牙、Zigbee、WiFi、超宽带定位等。

基于蓝牙信标的室内定位随着人们对室内定位需求的逐渐增加,依赖于蓝牙信标的室内定位系统也逐渐成为了一种较为普遍的解决方案。
蓝牙信标是一种小型电子设备,可与移动设备配对,向其发送信号并在附近广播自身位置的信息,被用于室内定位系统中,可以使应用程序能够确定手机或其他智能设备相对于信标所在的位置。
本文将对蓝牙信标与室内定位技术进行详细探讨。
一、蓝牙信标技术蓝牙信标是一种被设计用于室内位置识别与导航的电子设备,利用低功耗蓝牙技术连接到其他设备,并通过广播自身ID等信息被识别出来。
从技术上讲,一个蓝牙信标可以容纳一个唯一的标识符,而且有一个比其他设备更广的射程。
当移动设备进入蓝牙信标的覆盖范围内时,它会发现并读取信标广播的信息以确定自己的位置。
目前市场上的蓝牙信标种类繁多,主要分为两种类型:iBeacon和Eddystone。
1.iBeaconiBeacon是由苹果公司于2013年推出的一种低功耗蓝牙设备标准,其广播范围为几米到几十米。
它包含三个重要的参数:UUID、Major和Minor。
其中UUID为全球唯一的标识符,Major和Minor则分别用于在UUID的基础上定义区域和子区域。
2.EddystoneEddystone是谷歌公司于2015年推出的蓝牙信标协议。
同样是低功耗蓝牙技术,Eddystone与iBeacon不同的是,其数据包括广播的ID、URL、TLM三种类型,同时Eddystone的广播范围更大,最多可达到200米。
室内定位技术是一项涉及室内环境定位、路线规划等多个方面的技术,可用于导航、安保和移动广告等多个领域。
蓝牙信标技术作为其中的一种定位技术,也逐渐成为了重要的室内定位解决方案之一。
基于蓝牙信标的室内定位技术主要分为两个部分:部署和定位。
1.部署部署是指在室内环境中放置蓝牙信标。
在放置蓝牙信标时,需要已知房间的大小和形状,确定蓝牙信标摆放点的位置以及信标数量。
通过相应的软件工具,管理员可以为每个信标输入其ID等信息,并将其放置于建筑物的不同位置。

beacon定位原理Beacon定位原理是基于无线电信号传播原理实现的一种室内定位技术。
通过在室内放置一系列的beacon设备,利用它们发出的无线信号来定位移动设备的位置。
Beacon设备通常采用蓝牙低功耗(Bluetooth Low Energy,BLE)技术,可以持续广播短距离的信号。
移动设备可以通过扫描周围的beacon信号来确定自己所处的位置。
下面将详细介绍Beacon定位原理的几个关键方面:1. 信号广播和接收:Beacon设备通过固定的时间间隔发送广播信号。
这个广播信号包含了设备的唯一识别码(UUID)和其他一些有关设备的信息,如信号强度(RSSI)和发射功率(TX Power)。
移动设备通过扫描周围的信号来获取这些信息。
2. 信号传播模型:Beacon信号的传播遵循一定的信号强度衰减规律。
信号衰减模型主要包括两个因素:距离和环境。
根据收到的信号强度,移动设备可以推断出自己离Beacon设备的距离。
3. 三角测距:借助收到的多个Beacon信号,移动设备可以使用三角测距算法来确定自己的位置。
三角测距原理是通过收集至少三个Beacon的信号,并结合它们与移动设备之间的距离,计算设备的精确位置。
这个过程类似于GPS定位系统。
4. 基站定位:Beacon设备的布局和位置也是Beacon定位原理的关键因素。
布置不同位置的Beacon设备可以根据需要创建不同大小和形状的定位区域。
通过计算所收到的Beacon信号位置来自不同Beacon设备的距离和方向,可以确定移动设备相对于这些Beacon设备的位置。
这种基站定位适用于中小范围的室内环境。
5. 参考点匹配:随着Beacon设备数量和覆盖范围的增加,可以建立一个详细的参考点数据库。
移动设备在接收到Beacon信号时,可以与数据库中的参考点进行匹配,进一步提高位置的准确性。
总结起来,Beacon定位原理基于无线电信号的广播和接收,通过信号传播模型和三角测距等算法来确定移动设备的位置。

iBeacon技术介绍iBeacon技术介绍iBeacons是苹果在2013年WWDC上推出一项基于蓝牙4.0(Bluetooth4.0|BLE|Bluetooth Smart)的精准微定位技术,当你的手持设备靠近一个Beacon基站时,设备就能够感应到Beacon信号,范围可以从几毫米到50米。
2014年3月11日,苹果iOS7.1版本发布的同时也为iBeacaon协议带来了新的功能,它允许用户设备上的应用在关闭状态下也能搜索到iBeacon信标,并改善了蓝牙的响应速度,用户在探索iBeacon信标时几乎是瞬时反应,随时随地可得。
iBeacons技术特点1、免配对。
苹果在之前对蓝牙设备的控制比较严格,所以只有通过MFI认证过的蓝牙设备才能与iDevice连接,而蓝牙4.0就没有这些限制了;2、定位精准、距离更远。
普通的蓝牙(蓝牙4.0之前)一般的传输距离在0.1-10m,而iBeacons 信号可以精确到毫米级别,并且最大可支持到50m的范围;3、超低功耗。
蓝牙4.0又叫低功耗蓝牙,一个普通的纽扣电池可供一个Beacon基站硬件使用两年。
4、适用广泛。
所有搭载有蓝牙4.0以上版本的设备(iOS设备外,Android和Windows Phone 平台也可以同样适用)都可以作为iBeacons技术的发射器和接收器。
iBeacon典型应用一、室内定位、导航iBeacon精准定位技术,定位范围可从几毫米到50米,即便在没有无线网、GPS的建筑物内,通过iBeacon技术也可以实现“室内导航”的用途。
三、移动支付iBeacon技术除了可以帮助商家及时推送优惠信息以外,还能够在蓝牙技术的帮助下快捷的完成掌上支付。
考虑到iBeacon技术的覆盖范围远远大于NFC,未来在移动支付上iBeacon 有着更广阔的想象空间。
beacons设备及应用示例:Estimote是国外最早开始研究和推广iBeacon技术的厂商,并且成功的获得310万美元风险投资,目前来说在业界做的也算是比较成熟好用的。
ibeacon协议iBeacon协议。
iBeacon是一种基于蓝牙低功耗技术的定位服务,它可以帮助移动应用程序识别用户的位置,并向用户发送相关的信息。
iBeacon协议是苹果公司推出的一种基于蓝牙4.0技术的定位服务协议,它可以让移动设备在特定范围内与iBeacon设备进行通信,从而实现室内定位、导航、推送信息等功能。
本文将详细介绍iBeacon协议的相关内容。
首先,iBeacon协议基于蓝牙4.0技术,它利用低功耗蓝牙(BLE)技术实现设备之间的通信。
iBeacon设备通过发射蓝牙信号,向周围的移动设备广播自己的位置信息和唯一标识符。
移动设备在接收到iBeacon设备的信号后,可以计算出自己与iBeacon设备之间的距离,并据此进行定位和导航。
其次,iBeacon协议规定了一套标准的信号格式和数据格式。
每个iBeacon设备都有一个唯一的UUID(通用唯一标识符)、一个主要值(Major Value)和一个次要值(Minor Value)。
移动设备在接收到iBeacon设备的信号后,可以通过解析这些数值来识别不同的iBeacon设备,并进行相应的定位和导航。
另外,iBeacon协议还规定了一些特定的应用场景和使用方式。
比如,在商场、博物馆、机场等室内场所,可以部署多个iBeacon设备,通过这些设备向用户发送特定的信息,比如促销信息、展品介绍、导航指引等。
同时,移动应用程序可以根据接收到的iBeacon信号,向用户推送相关的信息,从而提升用户体验和增加交互性。
最后,iBeacon协议还具有一定的隐私保护机制。
iBeacon设备只能发送信号,不能接收信号,因此用户的隐私信息不会被泄露。
同时,用户可以通过设置自己的移动设备,选择是否接收特定iBeacon设备的信号,从而保护个人隐私。
总之,iBeacon协议是一种基于蓝牙低功耗技术的定位服务协议,它可以帮助移动应用程序实现室内定位、导航、推送信息等功能。
ibeacon 解决方案
《iBeacon解决方案》
iBeacon技术是一种近场定位和传输技术,利用蓝牙低功耗技
术进行短距离通信。
它可以通过在特定地点发送信号,让其它设备感知到自己的存在,从而实现室内定位、位置推送等功能。
iBeacon技术已经在零售、娱乐、旅游、医疗等领域得到广泛
应用,但在实际应用过程中也面临一些问题,比如信号干扰、定位精度等。
针对这些问题,各种iBeacon解决方案应运而生。
首先是信号
干扰的问题,解决方案可以采用布线优化、信号强化、信号遮蔽等方法来改善信号覆盖范围和稳定性。
另外,定位精度不高也是一个常见问题,可以通过增加iBeacon设备密度、使用更
高精度的传感器、结合地图数据等方式来提高定位精度。
此外,iBeacon解决方案还可以结合大数据分析、智能推送等
技术,实现更加个性化、智能化的服务。
比如通过分析用户行为数据,可以为用户提供更精准的推送信息和定位服务,提升用户体验。
另外,结合物联网技术,iBeacon还可以与其它设
备进行联动,比如与智能家居设备、车联网设备等实现智能控制和连接。
总的来说,针对iBeacon技术在实际应用中遇到的各种问题,
不同的行业和场景都可以制定相应的解决方案。
结合硬件、软件和数据分析等多种技术手段,可以使iBeacon得到更广泛的
应用,并为用户提供更好的定位和服务体验。
iBeacon技术下PDR增强的室内定位方法设计吴坚;王秀【摘要】This paper presents a method for indoor location by using iBeacon auxiliary for PDR.The method uses particle filter to fuse PDR and iBeaeon to determine the location of the user,so as to reduce the cumulative error caused by the increase of PDR with the increasing walking distance.Furthermore,based on the iBeacon online step size adjustment model,the error caused by the step length is decreased to a certain extent.In the paper,the experiments prompted that the proposed method can effectively overcome the cumulative error generated by PDR,and validly improve the robustness and accuracy of locationing.%提出一种利用iBeacon技术辅助PDR的室内定位方法.采用粒子滤波器将PDR和iBeacon技术定位信息融合,从而确定出用户的位置,以此减少PDR随距离增加而产生的累积误差.此外,基于iBeacon在线步长调整模型在一定程度上减少了步长不正确带来的误差.实验结果显示,提出的方法能够有效克服PDR产生的累积误差,有效提升了定位的鲁棒性和精度.【期刊名称】《福州大学学报(自然科学版)》【年(卷),期】2017(045)005【总页数】6页(P646-651)【关键词】iBeacon;行人航迹导航定位算法;粒子滤波;惯性传感器【作者】吴坚;王秀【作者单位】福州大学数学与计算机科学学院,福建福州350116;福州大学数学与计算机科学学院,福建福州350116【正文语种】中文【中图分类】TP274.2随着移动通信技术和互联网技术的快速发展,基于位置的服务的需求逐渐增加. 例如,车辆跟踪、位置查询、家长跟踪定位小孩的位置、在大型商场内快速定位自己的位置等等. 对于室外定位,可以通过全球定位系统(global positioning system, GPS)来实现. 然而,在室内,由于建筑物对GPS信号的遮挡,使其在室内定位中不能很好地发挥作用. 因此,如何实现一个高精度的室内定位仍然是一个研究热点.室内定位系统被设计用来为个人和智能设备提供位置信息[1]. 定位收敛时间和定位精度被认为是评价定位技术最重要的两个因素. 室内定位较早是通过红外线(Infrared)[2]来实现定位的,红外有着定位精度高的特点,但是易受到其他光源的影响且定位设备较昂贵. 射频技术[3](radio frequency identification, RFID)也适合用于室内定位,其覆盖率大,但是需要在定位区域内安装大量的设备. 基于Wi-Fi的室内定位是目前比较常用的室内定位方法[4],但是由于Wi-Fi信号的高衰变性以及高功耗率,因此基于Wi-Fi的室内定位方法不适用于精度高和长时间室内定位及导航. 行人航迹导航定位算法(pedestrian dead reckoning, PDR)[5]是指从一个已知的坐标点位置开始,利用加速度传感器、方向传感器等感知行人在该时刻的速度、航向等,从而得到行人在下一时刻的坐标的过程. 与其他的室内定位方法相比而言, PDR方法对外界环境鲁棒性强,在较短时间内能获得较高的定位精度,然而,它是一种相对定位,会随着距离的增加而产生累计误差. 目前很多研究者已经结合了多种矫正方法来改进PDR系统产生的累积误差. 文献[6]提出了一种将PDR和GPS相结合的方法,但是在室内环境下接收到的GPS信号很弱,导致矫正效果不好. Fisher等[7]提出利用超声波来矫正PDR产生的累积误差,实验结果显示该方法可以有效提高定位精度,但是需要购买昂贵的设备,因此该技术并不适合大范围推广. 文献[8]提出利用Wi-Fi指纹与惯性传感器进行融合定位,该方法可以有效提高定位精度,但是需要离线采集大量指纹点,会增加人力成本.2013年苹果公司推出了基于低功耗蓝牙模块的定位技术, 也就是iBeacon技术. iBeacon技术[9]靠蓝牙基站拓扑根据射频场强随距离衰减的模型计算距离. 与Wi-Fi相比功耗更低,信号更稳定,目前大部分的iOS设备和Android设备都自带了低功耗蓝牙模块,因此可以十分方便地利用这项技术.基于iBeacon技术的优点,将iBeacon技术与PDR算法通过粒子滤波进行融合,提出了基于粒子滤波[10]的辅助定位方法iBeacon_PDR. 一般情况下要获得校正点处准确的位置信息,通常采用三点定位方法,该方法要求在矫正点处测得三个不在一条直线上的iBeacon基站的位置,这就需要在室内环境中部署高密度的iBeacon基站. 而本研究提出的方案中只需要在矫正点处有一个iBeacon基站即可,这将极大减少部署基站的成本;同时,在矫正阶段通过粒子滤波器将PDR和iBeacon技术进行融合从而定位出用户的位置,减少PDR产生的累积误差,最终达到校正目的.PDR算法的原理是已知起始点时刻的位置,利用行进的位移(即步长)和航向来推测当前时刻的位置,其数学表达式为:其中: (xk, yk) 是二维平面中行人的位置; lk是k时刻的步长;θk 是k时刻行人的朝向. 对于PDR方法,其中关键的三个因素是:步频检测、步长估算、方向检测.1) 步频检测. 步频检测可以利用竖直方向上加速度数据的周期性规律来对人体进行检测,但是由于智能手机自带的加速度传感器获得参数精度不高,因此本研究采用文献[11]提出的基于加速度计方差的动态阈值步频检测方法,通过设置一个方差阈值用于判定行人的运动状态. 经过分析统计,本研究阈值设定为Var(a(k))×g2,其中,a(k)=-g1 表示在k时刻通过智能手机上自带的加速度传感器获得的x、y、z轴加速度总和; g1 为重力加速度,而Var表示方差; g2 为本地加速度,可由静止情况下,计算n次a(k),然后取平均来获得.2) 行走步长. 每个人在不同的时刻行走的步长都不同,计算步长目前主要有常数步长模型[12]、线性步长模型[13],但是这些方法无法解决不同场景的情况,比如跳跃和跑步等情况. 本研究在常数步长模型的基础上,提出了基于iBeacon技术在线调整步长模型,具体方法见3.3节.3) 行走的航向. 利用智能手机内嵌的方向传感器来获得行人的航向角度,可以通过Android API提供的方位角、倾斜角和旋转角这三个值来获得[14]. 其中,方位角为返回水平时磁北极与y轴的夹角. 根据方位角就可以得到行人的运动方向的变换信息,之后将每步获得的方位角的值平均,就可以获得该步的方位信息了.通过方向传感器获得行人的航向,如图1所示.iBeacon是基于低功耗蓝牙4.0进行室内定位的技术,当智能终端接近iBeacon基站时,终端就能接收到iBeacon基站发射的蓝牙信号. iBeacon基站会周期性发射唯一编码UUID和信号强度值rssi,可以将iBeacon基站发射的信号强度值rssi通过信号传播损耗模型[15]转换为距离信息,从而定位出目标的位置, 常用的信号传播损耗模型为:其中: s是待测点处iBeacon基站发射的信号强度值rssi; s0是参考点处iBeacon 基站发射的rssi值;∂值为路径损耗即环境因子,与具体环境有关; d是待测点和iBeacon基站之间的距离; d0 是参考点与iBeacon基站之间的距离,通常取1 m. 因此,可以得到距离公式为:通过该公式,可以获得行人和iBeacon之间的距离,从而获得用户的绝对定位. 对于路径损耗因子,通过在实验场所采集大量信号强度,然后基于公式(3)求出对应的∂,再将这些∂进行平均,从而得到∂的平均值为2.粒子滤波[16]是一种通过非参数化的蒙特卡罗模拟的序列重要性抽样方法,该方法通过寻找在一组状态空间中传播的随机粒子来近似表示概率密度函数. 其用数学语言可以描述为,假设系统在k-1时刻的概率密度函数为p(xk-1|zk-1),然后随机生成n个样本点,在获取k时刻的测量zk,更新状态转移方程和观测方程,可以获得这n个样本的后验概率p(xk|zk),随着采样粒子数目的增加, p(xk|zk)会逐渐逼近真实的后验概率密度函数. 但随着迭代时间的增加,粒子一般都会出现权重退化的问题,只有少数的粒子权值较大,其余粒子的权值可忽略不计. 因此需要进行重采样,复制权重大的粒子以满足粒子数目需要.由于PDR算法不能获取绝对的定位信息,为了提高PDR定位算法的精度,本研究采用融合iBeacon技术进行辅助定位,通过iBeacon技术为PDR系统提供绝对的定位信息. 由于此融合问题是一个非线性问题,因此不能采用传统的线性融合算法来解决该问题. 而粒子滤波器为非线性动态系统提供了一种有效的解决方法,从而适用于室内定位算法,故可以通过粒子滤波将PDR和iBeacon技术进行融合,以此实现辅助定位.本研究提出基于粒子滤波的融合算法iBeacon_PDR,通过粒子滤波策略将iBeacon技术获得的绝对定位与PDR进行融合,从而获得更加稳定和精确的定位精度.iBeacon基站发射的蓝牙信号强度值rssi在传输过程中,随着距离的增加,信号将变得越来越不稳定,从而使得利用rssi值计算出的行人与iBeacon基站之间的距离也将变得不准确. 在iBeacon基站的某个范围内,根据距离与iBeacon基站发射的rssi之间的关系,由当前的rssi值计算出iBeacon基站与行人之间的距离较为准确. 因此,当用户在走入某个iBeacon基站发射的强蓝牙信号范围内部的时候,可以采用iBeacon技术的矫正模型. 本研究采用的策略是当智能设备接收到的iBeacon基站发射的rssi值大于预设的阈值时,则开启矫正算法iBeacon_PDR.定义1 粒子与iBeacon基站之间的距离用于表征第i个粒子和iBeacon基站之间的距离具体公式如下:其中: (m, n)是iBeacon基站的位置;是第i个粒子在k时刻的位置.定义2 粒子权重用于表征行人实际位置与粒子表示的估计位置之间的相似度,计算权重的公式如下:其中: d是利用公式(3)计算出的行人与iBeacon基站之间的距离;σn为标准差.定义3 有效粒子数Neff 用于衡量粒子权值的退化程度,有效粒子数可以近似为:详细的算法如下:1) 初始化. 给定行人的初始位置(x0, y0),并以初始点位置为均值, 标准差为2的高斯分布来产生n个粒子. 初始权值表示为且每一个粒子表示行人的一个可能的位置,可以表示为).2) 粒子状态转移. 通过智能手机获得行人的步长和航向,计算粒子在第k步的位置, 具体计算公式如下:其中:是二维平面中第i个粒子在k时刻的位置; lk 是k时刻的步长;θk 是k时刻粒子的朝向.3)观测阶段. 当智能设备接收到的iBeacon基站发射的信号强度值RSSI大于阈值(预设的强度)时,计算出第i个粒子和iBeacon基站之间的距离4)权重计算. 计算第i个粒子在k时刻的权重为了保证所有粒子权重相加后为1,需要归一化权重,公式为:5)位置更新. 更新行人位置(xk, yk),计算公式如下:6)重采样. 若小于预设的阈值,进入重采样阶段,其采样过程为:a) 从均匀分布的[0, 1]区间中随机产生一个样本ut~U[0, 1], t=1, 2, …, n;b) 将满足公式的粒子索引i对应的粒子集作为新粒子集中的第t个粒子;c) 重复n次,从而生成新的粒子集,每个粒子的权重都为1/n.在实际应用中,由于每个人的行走步长不一致,会导致定位误差的增大,因此需要不断调整步长来提高定位的稳定性和精度.本研究在常数步长模型的基础上,提出了基于iBeacon技术在线调整步长模型.因为iBeacon技术的辅助定位是将行人矫正到绝对位置上,通过统计实验得出的常数来设置初始的步长,所以,在实验过程中利用iBeacon技术的辅助定位来得到动态步长SL的方法如下:其中: L(位移)是两个iBeacon基站之间的距离; N(步数)是两次位置矫正之间的行走步数.本研究通过两个实验来验证融合算法iBeacon_PDR的效果. 实验1(行走步长的改进)在真实环境中进行,实验者直线行走了20 m,路程中部署了两个iBeacon基站. 实验2(融合算法iBeacon_PDR)的实验环境为一个25 m×80 m的办公室区域,并稀疏部署了13个iBeacon基站,其中粉红色星星为iBeacon基站的位置,如图2所示. 使用的手机是华为荣耀6,运行Android 4.2.2系统,其中手机只有接收到iBeacon基站发射的rssi值大于一定阈值时才开启矫正程序 .本实验设置初始步长为0.8 m,然后匀速计步统计, 5次纠正步长的均值为0.89 m,如表1所示. 由表1可以看出,由于智能手机自带的传感器测量存在误差,导致计步上存在误差,从而影响了步长的计算,而本研究提出的行走步长改进算法能够及时调整步长,从而减少由计步误差带来的对定位精度的影响. 因此,其在线调整步长能够有效提高定位精度.用户通过手持设计好的Android App程序在办公室区域行走,通过记录每步行走的地理坐标位置导入到一个文档中,然后通过ArcGIS软件将获得的地理坐标位置导入,最后绘制出一条行走的路径.图3显示了行人真实路径、 PDR方法估计的路径、基于粒子滤波的融合算法iBeacon_PDR估计的路径. 从图3可以看出, PDR方法会随着距离的增加而产生累积误差,产生越来越大的偏移,而融合算法iBeacon_PDR则能将轨迹矫正到正确的轨道上,因此采用PDR与iBeacon技术进行融合的定位算法提高了系统对环境的鲁棒性,从而实现长期稳定的定位精度.同时,我们对两种定位的定位误差的累积分布函数(计算估计位置和真实位置之间的误差)进行统计,结果如图4所示.从图4中可以看出,单独采用PDR方法进行定位时,有60.33%的概率精度优于2 m;而采用融合算法iBeacon_PDR进行定位时,有92.21%的概率精度优于2 m,且有63.2%的概率精度在1 m以下. 因此, PDR与iBeacon技术结合的联合定位方法有效提高了室内定位系统的精度. 实验结果表明,在进行行人室内定位时,本研究提出的融合算法iBeacon_PDR相较于PDR方法具有较好的性能.提出一种在定位矫正阶段通过粒子滤波将PDR与iBeacon技术相结合的室内定位方法iBeacon_PDR,实验结果显示,提出的方法能够提高定位精度,具有较强的鲁棒性. 此外,本研究的步长改进算法能够获得有效的提高定位的精度和稳定性. 在未来的工作中,由于Android智能手机平台上使用的是低成本的传感器,课题组计划提高PDR算法的定位精度、稳定性,且对iBeacon基站发出的信号进行滤波处理,从而获得更加精确的矫正位置,以期进一步提高定位精度.【相关文献】[1] GU Y, LO A, NIEMEGEERS I. A survey of indoor positioning systems for wireless personal networks[J]. Communications Surveys and Tutorials, IEEE, 2009, 11(1): 13-32. [2] LEE S, HA K N, LEE K C. A pyroelectric infrared sensor-based indoor location-aware system for the smart home[J]. IEEE Transactions on Consumer Electronics, 2006, 52(4): 1 311-1 317.[3] CHANDRASEKARAN V, NARAYAN K, VASANI R K, et al. Inplace RFID: indoor path loss translation for object localization in cluttered environments[C]// The IEEE 10th International Conference on Intelligent Sensors, Sensor Networks and Information Processing. [S.l.]: IEEE, 2015: 1-6.[4] MA R, GUO Q, HU C, et al. An improved WiFi indoor positioning algorithm by weighted fusion[J]. Sensors, 2015, 15(9): 21 824-21 843.[5] BEAUREGARD S, HAAS H. Pedestrian dead reckoning: a basis for personal positioning[C]//Proceedings of the 3rd Workshop on Positioning, Navigation and Communication. New York: IEEE, 2006: 27-35.[6] TIAN G H, ZHANG Q B, DING N N. Research on integrated positioning of PDR and GPS based WT-UKF[J]. Control and Decision, 2015, 30(1): 86-90.[7] FISCHER C, MUTHUKRISHNAN K, HAZAS M, et al. Ultrasound-aided pedestrian dead reckoning for indoor navigation[C]// Proceedings of the ACM International Workshop on Mobile Entity Localization and Tracking in GPS-less Environments. San Francisco: ACM, 2008: 31-36.[8] CHEN G, MENG X, WANG Y, et al. Integrated WiFi/PDR/smartphone using an unscented kalman filter algorithm for 3D indoor localization[J]. Sensors, 2015, 15(9): 24 595-24 614.[9] MARTIN P, HO B J, GRUPEN N, et al. An iBeacon primer for indoor localization: demo abstract[C]//Proceedings of the 1st ACM Conference on Embedded Systems for Energy-Efficient Buildings. New York: ACM, 2014: 190-191.[10] HONG F, ZHANG Y, ZHANG Z, et al. WAP: indoor localization and tracking using WiFi-assisted particle filter[C]// IEEE Conference on Local Computer Networks. Edmonton: IEEE, 2014: 210-217.[11] 邓中亮. 室内外无线定位与导航[M]. 北京:北京邮电大学出版社, 2013.[12] 洪超. 基于多传感器的安卓平台室内导航技术研究[D]. 成都:电子科技大学, 2015.[13] 王克己. 室内定位系统中的行人航迹推算研究[D]. 北京:北京邮电大学, 2015.[14] 张荣吉. 基于移动设备多维感知的室内定位方法研究[D]. 秦皇岛:燕山大学, 2013.[15] 郭小成, 刘喜凤. 基于无线信号传播损耗模型的RFID定位系统[J]. 科技创业家, 2013(8): 7-8.[16] TIAN M, BO Y, CHEN Z, et al. Improved adaptive particle filter for integrated navigation system[J]. CMES-Computer Modeling in Engineering and Sciences, 2015,108(5): 285-301.。
楼宇的iBeacon室内定位技术
1iBeacon介绍
iBeacon是苹果在2013年WWDC上推出一项基于蓝牙4.0(BluetoothLE|BLE|
BluetoothSmart)的精准微定位技术,当你的手持设备靠近一个Beacon基站时,
设备就能够感应到Beacon信号,范围可以从几毫米到50米。因为是一种定位技
术,苹果将iBeacon相关的接口放到了CoreLocation.framework。Google在Android
4.3及后续版本支持了该功能,只要满足iBeacon技术标准即可。
BLE与传统的蓝牙相比最大的优势是功耗降低90%,同时传输距离增大(理想状
况下超过100米)、安全和稳定性提高(支持AES加密和CRC验证)。iBeacon同
时有一些自己的特点:
(1)无需配对,一般蓝牙设备印象中都需要配对工作。iBeacon无需配对,因为
它是采用蓝牙的广播频道传送信号。
(2)程序可以后台唤醒,iBeacon的信息推送需要App支持。但是我们接收iBeacon
信号无需打开App,只要保证安装了,同时手机蓝牙打开。
(3)iBeacon不具备传统意义上的数据传输功能,Beacon基站只推送位置信息,
数据格式如下图所示。如果开发的APP要运行起来并与服务器通信以实现定制
化功能、获取定制化数据,需要开启其他的数据通信方式,如WIFI、4G等。
其中:
UUID:厂商识别号
Major:相当于群组号,同一个组里Beacon有相同的Major
Minor相当于识别群组里单个的Beacon
TXPower:用于测量设备离Beacon的距离
UUID+Major+Minor就构成了一个Beacon的识别号,有点类似于网络中的IP地址。
TXPower用于测距,iBeacon目前只定义了大概的3个粗略级别:
非常近(Immediate):大概10厘米内
近(Near):1米内
远(Far):1米外
2iBeacon工作原理
iBeacon的工作原理是基于BluetoothLowEnergy(BLE)低功耗蓝牙传输技术发送
特定识别信息。蓝牙低功耗Beacon基站不断向四周发送蓝牙信号(含相同的
UUID,一个区域内有多个相同UUID时,可附带其他信息以区分),带满足iBeacon
技术标准的蓝牙模块的智能设备进入设定区域时,就能够收到信号。蓝牙设备定
位接受并反馈信号,定位引擎通过三点定位算法、采用RSSI方式计算出用户位
置。
BLE(低功耗蓝牙技术)是一种2.4GHz频段的射频技术,射频信号的传播受环境干
扰大不稳定,基于该原理的测距也不会精确。苹果也是把结果放在一个概率范围
内,分成如上所述的immediate,Near,Far,实际定位精度约在3米左右,国内
一些厂商号称能达到0.3米的3D定位精度。
3系统组成
3.1系统架构
3.2主要设备组成
(1)蓝牙终端,包括手机、PAD等;
(2)Beacon基站;
(3)Beacon定位引擎;
(4)其他网络设备设施及服务器。
3.3主要基本功能
(1)室内位置监测和轨迹记录;
(2)室内地图导航;
(3)精准信息(广告)推送。
4部署原则
(1)蓝牙Beacon离地高度:3m
一般在2.5-3m之间,如现场安装位置较高或遮挡等,需要考虑增加衰减预算;
或者采用地面、墙面部署,保证高度在3m内。
(2)蓝牙Beacon水平间距:4-8m
1D定位场景:适合隔离度高的过道,理论上只需要按序列部署一列间距4-8m的
Beacon。
一般定位场景(开放区域):蓝牙Beacon呈三角均匀部署,需要3个或3个以上
的蓝牙Beacon。互相间距4-8m。
本文来自网络收集,如有侵权麻烦联系删除!