目标定位跟踪算法及仿真程序
- 格式:doc
- 大小:36.50 KB
- 文档页数:4

雷达动态探测目标的仿真建模谢卫,陈怀新(中国电子科技集团公司第十研究所,成都 610036)摘要:通过对雷达动态探测目标过程分析,提出了雷达探测目标仿真模型的方法,实现了雷达目标检测、多目标滤波跟踪、资源调度管理等数字模型。
实际表明这些模型满足数据融合中雷达探测目标数据的需求,并且建模方法对数据融合传感器模型建立具有实际指导意义。
关键词:雷达;建模;仿真;数据融合Radar detection of targets dynamic simulation modelingXIE Wei,CHEN Huai-xin(CETC No.10th Research Institute, Chengdu, China; )Abstract:With the analysis of the process of radar dynamic detecting targets, a method of the simulation model based on of radar detect targets is presented, some mathematic models (such as target indication by radar, variable number of targets tracking, resource management based on Scheduling algorithm) are realized. An actual experiment that the simulation data provided by radar detecting model can supply for the study of data fusion was made, simultaneity modeling method has a certain actual instructing meaning at the aspect of sensor detecting model of data fusion.Key words: radar; modeling; simulation; data fusion1 引言现代战场上各种目标的出现,要求利用多种传感器组网来采集信息并加以融合,充分利用不同目标各个方向、不同频段的反射特性,最大限度地提取信息,满足战场需要。

基于指数平滑的动态规划检测前跟踪算法胡显东;陈伯孝;王俊【摘要】针对传统动态规划检测前跟踪(Dynamic Programming Track-Before-Detect,DP-TBD)算法在低信噪比(Signal to Noise Ratio,SNR)环境下跟踪性能较差以及容易出现团聚效应的问题,提出一种基于指数平滑法的DP-TBD算法.该算法的创新之处在于:利用指数平滑法预测当前帧的目标状态,当对当前帧代价函数进行优化时利用预测的目标状态对前一帧搜索窗内的代价函数进行加权.仿真结果表明,文中所提算法能够有效抑制团聚效应,且算法的检测性能和跟踪性能都比传统算法有所提高,并且信噪比越低,性能提高越明显.因此文中算法相对于传统算法来说更适用于低信噪比环境.【期刊名称】《电波科学学报》【年(卷),期】2016(031)003【总页数】6页(P468-472,478)【关键词】动态规划;检测前跟踪;团聚效应;指数平滑法【作者】胡显东;陈伯孝;王俊【作者单位】西安电子科技大学雷达信号处理国家重点实验室,西安710071;西安电子科技大学雷达信号处理国家重点实验室,西安710071;西安电子科技大学雷达信号处理国家重点实验室,西安710071【正文语种】中文【中图分类】TN957DOI 10.13443/j.cjors.2015062301检测前跟踪(Track-Before-Detect,TBD)是低信噪比(Signal to Noise Ratio,SNR)情况下对微弱目标进行检测和跟踪的一种技术.相对于传统检测方法而言,TBD并不是通过每帧设置门限来检测目标,而是将多帧数据进行联合处理,经过积累后得到目标检测结果的同时给出目标的轨迹.由于单帧并没有过门限处理,TBD保留了更多的目标信息.所以说TBD的本质是通过时间积累来提高信噪比.目前TBD的主要实现方法有:三维匹配滤波、霍夫变换、多阶假设检验、动态规划、粒子滤波等[1-3]. 动态规划检测前跟踪(Dynamic Programming TBD,DP-TBD)算法已广泛应用于红外弱目标检测[4-5],目前也正应用于雷达系统中[6-10].传统算法在进行状态搜索时,只是在前一帧的搜索窗内寻找代价函数最大者,这种方式会使能量扩散到目标真实状态附近,称为团聚效应.团聚效应会对最终的目标检测造成困难.文献[11]将目标后验概率比的对数作为代价函数,本质上就是在状态搜索过程中加入状态转移惩罚项,利用目标运动特征对搜索状态进行调整,但该方法假设目标状态信息在时间上独立且各个状态之间也是独立的,这种假设在实际雷达系统中是不容易成立的.文献[12]根据目标在相邻帧间运动不会倒退的原理,提出一种方向加权算法,改进了算法性能,但当帧间时间间隔变大时算法的性能会急速下降.文献[13]在原来可能状态转移的基础上又对后续状态进行了估计,因此可以减少目标强度起伏的影响,提高了关联精度.文献[14]在第k帧观测值与第k-1帧窗内某观测值累加的基础上,沿此方向再与第k-2帧区域内的代价函数最大者进行累加,并记录累加后最优代价函数值所对应的前两帧的位置,用于回溯航迹,但这种方法对目标的机动性很敏感.文中首先利用指数平滑法进行状态预测,当对目标的每个可能状态进行状态搜索时,利用预测状态与当前帧状态所对应的距离差对前一帧搜索窗内的代价函数加权.当状态预测精度足够高时,目标前一帧真实状态所对应的预测状态就会贴近当前帧状态,因此前一帧真实状态处的代价函数就会获得较大的权值,从而提高了被关联的概率.文中给出所提算法检测和跟踪性能的仿真结果,并与传统算法进行了比较,验证了算法性能.假设雷达每帧数据由M×N个分辨单元组成,第k帧观测数据可表示为,其中zk(x,y)表示第k帧(x,y)处的观测值:DP-TBD的目的就是利用数据Z估计目标轨迹X.根据弹道积分原理,目标沿轨迹上积累的能量必定大于沿非轨迹上积累的能量.因此DP-TBD问题可以归结为一个K 维优化问题.根据动态规划最优化原理,不论过去的状态和优化结果如何,对前面的优化过程所形成的状态而言,余下的优化过程必须满足最优化策略,所以上述K维优化问题可以转化为K个一维优化问题:2.1 基于预测值加权的DP-TBD算法针对传统DP-TBD算法在低SNR情况下容易出现航迹关联错误,难以回溯真实的目标航迹这一问题,文中提出一种加权算法:利用式(4)优化第k帧任意Vk(xk)时,针对Uxk中每个xk-1,首先运用指数平滑法获取对应的预测值k,然后根据k和xk所对应的距离差对Vk-1(xk-1)进行加权,即将式(4)更新为2.2 指数平滑法为了获得高精度预测值,文中采用线性二次指数平滑法[15]进行状态预测,由于线性二次指数平滑法也是递归地进行预测,因此既不需要存储大量数据也可以很好地加入动态规划优化过程.该方法分为平滑和预测两个阶段.首先平滑当前帧的状态,平滑公式如下:由式(9)可知,想要获得k(xk-1),只需xk-1和k-1帧的平滑值 (xk-1)和 (xk-1),因此只需要在TBD递归过程中引入变量和,便可以实现指数平滑预测.2.3 基于指数平滑的DP-TBD算法实现流程1) 初始化(k=1)对于所有x1,令V1(x1)=z1(x1);Ψ1(x1)=0;2) 初始预测(k=2)对于任意的x2,运用式(4)、(5)得到相应的代价函数和航迹追踪函数,然后运用式(8)计算第2帧平滑值:3) 循环递推(3≤k≤K)将前一帧平滑值代入式(9)预测当前帧状态,然后将式(7)计算出的权值代入式(6)、(5)计算代价函数和航迹追踪函数,最后计算当前帧平滑值.4) 目标检测当积累K帧数据后,对于任意状态xK,利用以下方法进行目标检测:VT=-bn·ln(-ln(1-pd))+an.5) 航迹回溯运用xk-1=Ψk(xk) (k=K,K-1, (1)为验证文中算法的性能,将文中算法和传统算法进行了比较.假设雷达观测区域为,每帧接收数据大小为50×50,x轴和y轴分辨单元均分100 m,总共有20帧接收数据,相邻帧的时间间隔为1 s.设目标初始状态x1=(1.51×105,1.21×105,100,100),在观测区域内做匀速直线运动,观测噪声为参数为1的瑞利分布.文中利用目标检测概率和跟踪概率来验证算法性能.检测概率表示经过20帧的数据积累后检测到目标的概率,允许误差为一个分辨单元.跟踪概率表示检测到目标并且经过航迹回溯后每帧的状态都和目标真实状态相差在一个分辨单元内的概率.仿真中进行100次蒙特卡罗实验.图1为传统算法和文中所提算法在SNR为6 dB时经过20帧积累处理后得到的代价函数比较图,图1(a)为传统算法代价函数,图1(b)为文中所提算法代价函数.比较可知,传统算法在目标真实位置附近的代价函数同样也很高,存在明显的团聚效应,在检测目标时会对门限的设置造成困难,而所提算法则有效地抑制了这种现象,可以更加准确地检测目标真实状态.图2为传统算法和所提算法的检测概率随SNR变化的比较图.由图可知:在SNR相同的情况下,文中提出算法的检测概率都要高于传统算法;当SNR高于7 dB时,两种算法性能差距不大;当SNR较低为4时,文中算法检测概率比传统算法高出0.3.可见SNR越低,文中算法检测优势越明显.图3为SNR为4 dB时传统算法与文中算法的跟踪效果比较图.由图可知,传统算法有多处出现关联偏差而文中算法则较准确地恢复了目标航迹.因此在低SNR环境下,文中算法拥有更好的跟踪性能.图4为传统的DP-TBD算法和文中算法的跟踪概率随SNR的变化比较图.在SNR 相同的情况下,文中提出算法的跟踪概率都要优于传统算法.当SNR为7 dB时,文中算法跟踪概率只比传统算法高0.05,但当SNR为4 dB,跟踪概率差距扩大到0.3,可见在低SNR情况下,传统算法的跟踪概率很低,而文中算法仍然具有较好的跟踪性能.针对传统DP-TBD算法在低信噪比情况下容易出现关联错误和团聚效应的问题,提出了一种基于指数平滑的加权DP-TBD算法.文中方法的创新之处在于:运用指数平滑法预测目标状态,再利用预测的目标状态加权前一帧的代价函数.由于充分利用了目标的运动特性,文中算法比传统算法具有更好的检测和跟踪性能.仿真结果表明,文中所提算法的检测性能和跟踪性能都比传统算法有一定的提高,且SNR越低,文中算法的优势越明显.因此文中算法比传统算法更适用于低信噪比环境.但当目标机动性较强,指数平滑法出现较大偏差时,算法性能会随之恶化.胡显东 (1990-),男,安徽人,西安电子科技大学博士研究生,研究方向为雷达微弱目标检测与跟踪.陈伯孝 (1969-),男,安徽人,西安电子科技大学教授,博士生导师,研究方向为新体制雷达系统设计、阵列信号处理、精确制导与目标跟踪等.王俊 (1969-),男,贵州人,西安电子科技大学教授,博士生导师,研究方向为无源双多基地雷达探测、定位与成像技术、传感器栅格和信息融合技术等.【相关文献】[1] REED I, GAGLIARDI R, SHAO H. Application of three-dimensional fitering to moving target detectin [J]. IEEE rransactions on aerospace and electronic systems, 1983, 19(6): 898-905.[2] 曾建奎, 何子述, 刘红明. 一种基于改进Hough变换的雷达检测方法[J]. 电波科学学报, 2008, 23(5): 838-841.ZENG J K, HE Z S, LIU H M. Improved detection algorithm for radar based on Hough transform[J]. Chinese journal of radio science, 2008, 23(5): 838-841. (in Chinese)[3] 鲜海滢, 傅志中, 李在铭. 强噪声背景下红外微弱目标集成检测[J]. 电波科学学报, 2008, 23(3): 438-442.XIAN H Y, FU Z Z, LI Z M. Integration detection algorithm of infrared small dim moving target based on strong complex noise[J]. Chinese journal of radio science, 2008, 23(4): 438-442. (in Chinese)[4] BARNIV Y. Dynamic programming solution for detecting dim moving targets[J]. IEEE transactions on aerospace and electronic systems, 1985, 21(1):144-156.[5] BARNIV Y, KELLA O. Dynamic programming solution for detecting dim moving targets Part II: analysis[J]. IEEE transactions on aerospace and electronic systems, 1987, 23(6):776-788.[6] ORLANDO D, VENTURINO L, LOPS M, et al. Track-before-detect strategies for STAP radar [J]. IEEE transactions on singal processing, 2010,58(2):933-938.[7] BUZZI S, LOPS M, VENTURINO L. Track-before-detect procedures for early detection of moving target from airborne radars[J]. IEEE transactions on aerospace and electronic systems, 2005, 41(3):937-954.[8] GAO F, ZHANG F F, ZHU H, et al. An improved TBD algorithm based on dynamic programming for dim SAR target detection [C]//12th International Conference on Signal Processing. Hangzhou, 19-23 Oct, 2014:1880-1884.[9] LIU R, YI W, KONG L J, et al. An efficient multi-target track-before-detect algorithm for low PRF surveillance radars [C]//12th International Conference on Singal Processing,2014:1273-1277.[10] 战立晓, 汤子跃, 易蕾, 等. 基于广义似然比检验-动态规划的检测前跟踪算法[J]. 电波科学学报, 2013, 28(1): 190-196.ZHAN L X, TANG Z Y, YI L, et al. Novel GLRT-DP based TBD algorithm in range-doppler domain[J]. Chinese journal of radio science, 2013, 28(1): 190-196. (in Chinese)[11] ARNOLD J, SHAW S, PASTERNACK H. Efficient target tracking using dynamic programming [J]. IEEE transactions on aerospace and electronic systems, 1993, 29(1):44-56.[12] 陈尚峰, 陈华明, 卢焕章. 基于加权动态规划和航迹关联的小目标检测技术[J]. 国防科技大学学报, 2003, 25(2): 46-50.CHEN S F, CHEN H M, LU H Z. Detection and tracking of dim targets based on dynamic programming and track matching[J]. Journal of national univeisity of defense technology, 2003,25(2): 46-50. (in Chinese)[13] 孙立宏, 王俊. 用于雷达弱小目标检测的改进TBD算法[J]. 雷达科学与技术, 2004,12(8): 292-295.SUN L H, WANG J. An improved track-before-detect algorithm for radar weak target detection[J]. Radar science and technology, 2004,12(8): 292-295. (in Chinese)[14] 吴卫华, 王首勇, 杜鹏飞. 一种基于目标状态关联的动态规划TBD算法[J]. 空军雷达学院学报, 2011,25(6): 415-418.WU W H, WANG S Y, DU P F. A dynamic programming track-before-detect algorithm based on targets state association[J]. Journal of air force radar academy, 2011, 25(6): 415-418. (in Chinese)[15] 张忠平. 指数平滑法[M]. 北京:中国统计出版社, 1996, 36-49.。
基于IMM-MHT算法的杂波环境多机动目标跟踪邵俊伟;同伟;单奇【摘要】针对杂波环境下多机动目标的跟踪问题,提出将交互多模型(IMM)算法与多假设跟踪(MHT)算法结合,并运用Murty算法和假设树修剪方法进行假设生成和假设管理,提高IMM-MHT算法的实用性.仿真结果表明,IMM-MHT算法具有较高的正确关联率和较好的跟踪稳定性,且与只使用单模型的MHT算法相比,具有更好的跟踪精度.【期刊名称】《舰船电子对抗》【年(卷),期】2014(037)002【总页数】5页(P87-90,93)【关键词】数据关联;多假设跟踪;交互多模型【作者】邵俊伟;同伟;单奇【作者单位】中国电子科技集团公司第38研究所,合肥230088;陆军驻中电集团38所军事代表室,合肥230088;中国电子科技集团公司第38研究所,合肥230088【正文语种】中文【中图分类】TP957.510 引言随着战场环境的日趋复杂以及目标机动性能的日益提升,如何在杂波环境下跟踪机动目标正成为雷达数据处理系统要应对的关键问题之一。
传统数据关联算法,如最近邻[1](NN)、概率数据关联[2](PDA)、联合概率数据关联[3](JPDA)等,以当前扫描周期内的量测为基础进行数据关联,若某一扫描周期内的关联结果与真实情况有较大差别,则之后的跟踪过程常会发生错误,甚至丢失目标。
多假设跟踪[4](MHT)的关联结果不仅取决于当前扫描周期内的量测数据,而且还与历史量测信息有关。
对不能确定的关联,会形成多种逻辑假设,并用后续的量测数据来解决这种不确定性。
在理想条件下,MHT是最优的数据关联算法,可以有效地解决杂波环境下的数据关联问题。
但是,MHT算法所需的计算和存储资源会随着量测数和跟踪步数的增长呈指数增加,若要实际应用,还需要有效的假设管理技术。
对机动目标,以单一的运动模型来刻画其运动过程,往往和实际情况有偏差,最终会由于模型失配导致跟踪误差增大甚至跟踪失败。
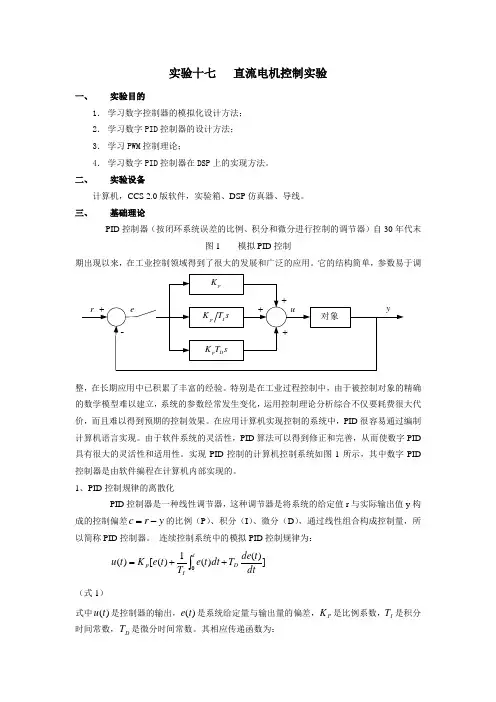
实验十七 直流电机控制实验一、 实验目的1. 学习数字控制器的模拟化设计方法;2. 学习数字PID 控制器的设计方法;3. 学习PWM 控制理论;4. 学习数字PID 控制器在DSP 上的实现方法。
二、实验设备 计算机,CCS 2.0版软件,实验箱、DSP 仿真器、导线。
三、基础理论 PID 控制器(按闭环系统误差的比例、积分和微分进行控制的调节器)自30年代末图1 模拟PID 控制期出现以来,在工业控制领域得到了很大的发展和广泛的应用。
它的结构简单,参数易于调整,在长期应用中已积累了丰富的经验。
特别是在工业过程控制中,由于被控制对象的精确的数学模型难以建立,系统的参数经常发生变化,运用控制理论分析综合不仅要耗费很大代价,而且难以得到预期的控制效果。
在应用计算机实现控制的系统中,PID 很容易通过编制计算机语言实现。
由于软件系统的灵活性,PID 算法可以得到修正和完善,从而使数字PID 具有很大的灵活性和适用性。
实现PID 控制的计算机控制系统如图1所示,其中数字PID 控制器是由软件编程在计算机内部实现的。
1、PID 控制规律的离散化PID 控制器是一种线性调节器,这种调节器是将系统的给定值r 与实际输出值y 构成的控制偏差y r c -=的比例(P )、积分(I )、微分(D ),通过线性组合构成控制量,所以简称PID 控制器。
连续控制系统中的模拟PID 控制规律为:])()(1)([)(0dtt de T dt t e T t e K t u D t I p ++=⎰ (式1)式中)(t u 是控制器的输出,)(t e 是系统给定量与输出量的偏差,P K 是比例系数,I T 是积分时间常数,D T 是微分时间常数。
其相应传递函数为:)11()(s T sT K s G D I p ++= (式2) 比例调节器、积分调节器和微分调节器的作用:(1)比例调节器:比例调节器对偏差是即时反应的,偏差一旦出现,调节器立即产生控制作用,使输出量朝着减小偏差的方向变化,控制作用的强弱取决于比例系数P K 。
I G I T C W导航 天地GNSS World12DIGITCW2024.040 引言无源定位是辐射源信息获取中重要的一方面[1-3]。
常用的定位方法适用于不同的平台数量,但通常平台样式较为单一,容易受到影响,目前缺乏有效的跨平台协同定位方法。
地球同步轨道(GEO )卫星与地球相对静止,对地观测范围大,能够全天时、全天候工作,具有较强的信号接收能力,并能够对信号进行透明转发。
将其与常规机动平台相结合,能够对辐射源进行高效定位。
本文在测向时差定位算法基础上[4-6],利用GEO 卫星和机动平台相互配合,提出星地协同测向时差定位算法。
传统双星或三星平台定位中需要主邻星波束同时覆盖目标,该算法避免了寻找匹配邻星的问题,且无需高程辅助信息就能对目标进行三维定位[7-10]。
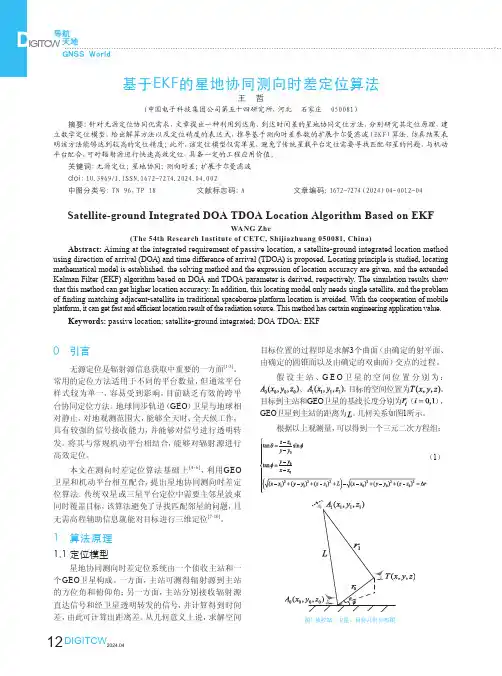
1 算法原理1.1 定位模型星地协同测向时差定位系统由一个侦收主站和一个GEO 卫星构成。
一方面,主站可测得辐射源到主站的方位角和俯仰角;另一方面,主站分别接收辐射源直达信号和经卫星透明转发的信号,并计算得到时间差,由此可计算出距离差。
从几何意义上说,求解空间目标位置的过程即是求解3个曲面(由确定的射平面、由确定的圆锥面以及由确定的双曲面)交点的过程。
假设主站、G E O 卫星的空间位置分别为:、,目标的空间位置为。
目标到主站和GEO 卫星的基线长度分别为(),GEO 卫星到主站的距离为。
几何关系如图1所示。
根据以上观测量,可以得到一个三元二次方程组:1)基于EKF的星地协同测向时差定位算法王 哲(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)摘要:针对无源定位协同化需求,文章提出一种利用到达角、到达时间差的星地协同定位方法,分别研究其定位原理,建立数学定位模型,给出解算方法以及定位精度的表达式,推导基于测向时差参数的扩展卡尔曼滤波(EKF)算法。
仿真结果表明该方法能够达到较高的定位精度;此外,该定位模型仅需单星,避免了传统星载平台定位需要寻找匹配邻星的问题,与机动平台配合,可对辐射源进行快速高效定位,具备一定的工程应用价值。
基于RTW和视景仿真的经纬仪跟踪控制仿真测试系统熊帅;付承毓;刘子栋【摘要】Testing on theodolite tracking control system is very important for the theodolite development. The function structure of the simulation test system was established. Real-time Workshop (RTW) was used to realize the tracking control algorithm fast. The virtual target motion scenes, which accord with the theodolite imaging character and effect and satisfy various simulation test demands, were rendered real-time based on the visual simulation technology. The practical applications show that this simulation test system can be used to test theodolite tracking control system and solve the limitation of traditional indoor test methods. It is not only convenient and fast, but also targeted and repeatable. The test system is quite useful to analyze and design theodolite tracking control system.% 在经纬仪研制中,对跟踪控制系统的测试具有十分重要的意义。
SAR成像BP算法仿真源程序及结果以下是一个基于BP算法的SAR成像仿真的源程序及结果展示。
源程序如下所示:```pythonimport numpy as npimport matplotlib.pyplot as plt#设置参数c=3*10**8#光速fc = 2 * 10**9 # 载频B=10**6#带宽lambda_ = c / fc # 波长#设置SAR系统参数Fs=2*B#采样频率T=1/Fs#采样周期PRI = 1 / fc # 脉冲重复间隔Rmax = 5000 # 最大探测距离Vr=500#目标速度#生成模拟的回波信号t = np.arange(0, PRI, T) # 一个脉冲内的时间序列F = np.linspace(-B/2, B/2, len(t)) # 频率序列R = np.linspace(0, Rmax, int(Fs * PRI)) # 距离序列#生成目标雷达截面target_rcs = 0.5 # 目标雷达截面target_distance = 2000 # 目标距离target_velocity = 0 # 目标速度#生成基站回波信号def generate_echo_signal(R, t, F, target_rcs,target_distance, target_velocity):for i in range(len(R)):for j in range(len(t)):delay = 2 * R[i] / c # 延迟时间doppler_shift = 2 * target_velocity * F[j] / fc # 多普勒频移phase_shift = 2 * np.pi * (F[j] * delay + fc * doppler_shift) # 相位差echo_signal[i][j] = np.exp(1j*phase_shift) * target_rcs /R[i]**2 # 回波信号return echo_signalecho_signal = generate_echo_signal(R, t, F, target_rcs,target_distance, target_velocity)#使用BP算法进行SAR成像def sar_imaging(echo_signal, R, t, F, c, fc, B, lambda_):for i in range(len(R)):for j in range(len(t)):for k in range(len(R)):for l in range(len(t)):delay = 2 * (R[i] - R[k]) / c # 延迟时间差doppler_shift = 2 * Vr * F[j] / fc # 多普勒频移phase_shift = 2 * np.pi * (F[j] * delay + fc * doppler_shift) # 相位差image[i][j] += echo_signal[k][l] * np.exp(1j*phase_shift) #累积成像return abs(image)image = sar_imaging(echo_signal, R, t, F, c, fc, B, lambda_)#展示SAR成像结果plt.figureplt.imshow(np.flipud(image), cmap='gray', extent=[0,np.max(t), np.min(R), np.max(R)])plt.xlabel('Time (s)')plt.ylabel('Range (m)')plt.title('SAR Imaging Result')plt.colorbarplt.show```运行以上程序,即可得到一张SAR成像结果图像。
双基阵纯方位被动定位跟踪方法胡科强;袁志勇;周浩【摘要】The basic principle and method for target motion analysis based on bearing measurements of two arrays is studied in this paper. The algorithm of Kalman filter estimation is presented. The simulation results show that the movement factors of single or double targets can be fast and steadily estimated using combined filter. At the same time, the influence of the bearing data association, space between two arrays and the error of bearing on the tracking performance is shown and references to engineering application are provided.%研究了双基阵纯方位目标运动分析的原理和方法,给出了卡尔曼滤波算法的模型.针对目标跟踪和滤波中容易出现的跟错目标和滤波发散问题,提出将进行方位数据时空关联、采取航迹状态转移和距离回归门限相结合的方法实现对单、双目标的跟踪定位.仿真实验表明,应用该方法可以快速、稳定地完成目标运动要素的估计,可以较好地应用于工程实现.【期刊名称】《舰船科学技术》【年(卷),期】2012(034)005【总页数】4页(P83-86)【关键词】纯方位;目标运动分析;目标跟踪【作者】胡科强;袁志勇;周浩【作者单位】海军工程大学兵器工程系,湖北武汉430033;海军工程大学兵器工程系,湖北武汉430033;海军工程大学兵器工程系,湖北武汉430033【正文语种】中文【中图分类】TP212纯方位目标运动分析(TMA)[1-5]一直是人们研究的重点和难点,这主要是因为测量方程为非线性的。
如有你有帮助,请购买下载,谢谢!
1页
目标定位跟踪算法及仿真程序
质心算法是最简单的定位算法,如图2-1所示,四个小圆为观测站,实线三
角形是目标真实的位置,假设四个圆形观测站都探测到目标的存在,则根据质心
定位算法,目标的位置(x,y)可以表示为:44321xxxxx,
4
4321
yyyyy
,这里观测站得位置为),(iiyx,同理,当观测站数目为N
时,这时候的质心定位算法可以表示为:
图1 质心定位
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 质心定位算法Matlab程序
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function main
% 定位初始化
Length=100; % 场地空间,单位:米
Width=100; % 场地空间,单位:米
d=50; % 目标离观测站50米以内都能探测到,反之则不能
Node_number=6; % 观测站的个数
for i=1:Node_number % 观测站的位置初始化,这里位置是随机给定的
Node(i).x=Width*rand;
Node(i).y=Length*rand;
end
% 目标的真实位置,这里也随机给定
Target.x=Width*rand;
Target.y=Length*rand;
% 观测站探测目标
X=[];
for i=1:Node_number
if DIST(Node(i),Target)<=d
X=[X;Node(i).x,Node(i).y];
end
end
N=size(X,1); % 探测到目标的观测站个数
Est_Target.x=sum(X(:,1))/N; % 目标估计位置x
Est_Target.y=sum(X(:,2))/N; % 目标估计位置y
Error_Dist=DIST(Est_Target,Target) % 目标真实位置与估计位置的偏差距离
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 画图
figure
如有你有帮助,请购买下载,谢谢!
2页
hold on;box on;axis([0 100 0 100]); % 输出图形的框架
for i=1:Node_number
h1=plot(Node(i).x,Node(i).y,'ko','MarkerFace','g','MarkerSize',10);
text(Node(i).x+2,Node(i).y,['Node ',num2str(i)]);
end
h2=plot(Target.x,Target.y,'k^','MarkerFace','b','MarkerSize',10);
h3=plot(Est_Target.x,Est_Target.y,'ks','MarkerFace','r','MarkerSize',10);
line([Target.x,Est_Target.x],[Target.y,Est_Target.y],'Color','k');
circle(Target.x,Target.y,d);
legend([h1,h2,h3],'Observation Station','Target Postion','Estimate Postion');
xlabel(['error=',num2str(Error_Dist),'m']);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 子函数,计算两点间的距离
function dist=DIST(A,B)
dist=sqrt( (A.x-B.x)^2+(A.y-B.y)^2 );
% 子函数, 以目标为中心画圆
function circle(x0,y0,r)
sita=0:pi/20:2*pi;
plot(x0+r*cos(sita),y0+r*sin(sita)); % 中心在(x0,y0),半径为r
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
执行程序,得到仿真结果:
更多目标定位跟踪算法和程序请参考以下书籍:
目 录
第一章 目标跟踪概述 1
1.1 多传感器探测的目标跟踪架构 1
1.2 目标定位算法简介 2
1.3 目标跟踪过程描述 2
1.4 跟踪模型的建立 4
第二章 常用目标定位算法 7
2.1 质心定位算法程序 7
2.2 加权质心定位算法程序 9
2.3 最小二乘/极大似然定位算法 12
2.3.1 测距技术 12
2.3.2 定位技术 14
16
2.3.4 最小均方误差的三维定位方法程序 17
2.3.5 最小二乘/极大似然用于目标跟踪(连续定位)程序 19
2.3.6 最小二乘/极大似然用于纯方位目标跟踪(连续定位)程序 22
第三章 卡尔曼滤波 24
3.1 Kalman滤波 24
3.1.1 Kalman滤波原理 24
3.1.2 Kalman滤波在目标跟踪中的应用及仿真程序 26
3.2 扩展Kalman滤波(EKF) 28
3.2.1 扩展Kalman滤波原理 28
如有你有帮助,请购买下载,谢谢!
3页
3.2.2 基于EKF的单站观测距离的目标跟踪程序 29
3.2.3 基于EKF的单站纯方位目标跟踪程序 32
3.3 无迹Kalman滤波(UKF) 35
3.3.1 无迹Kalman滤波原理 35
3.3.2 无迹卡尔曼在目标跟踪中的应用的仿真程序 36
3.4 交互多模型Kalman滤波(IMM) 40
3.4.1 交互多模原理 40
3.4.1 交互多模kalman滤波在目标跟踪应用仿真程序 47
第四章 蒙特卡洛方法 52
4.1 概念和定义 52
4.2 蒙特卡洛模拟仿真程序 53
53
53
54
54
55
4.3 蒙特卡洛理论基础 57
57
58
59
4.4 蒙特卡洛方法的应用 60
4.4.1 Buffon实验及仿真程序 61
4.4.2 蒙特卡洛方法计算定积分的仿真程序 62
第五章 粒子滤波 66
5.1 粒子滤波概述 66
5.1.1 蒙特卡洛采样原理 66
5.1.2 贝叶斯重要性采样 67
5.1.3 序列重要性抽样(SIS)滤波器 67
5.1.4 Bootstrap/SIR滤波器 69
5.2 粒子滤波重采样方法实现程序 71
5.2.1 随机重采样程序 71
5.2.2 多项式重采样程序 73
5.2.3 系统重采样程序 74
5.2.4 残差重采样程序 76
5.3 粒子滤波在目标跟踪中的应用 77
5.3.1 高斯模型下粒子滤波的实例程序 77
5.3.2 高斯噪声下粒子滤波用于目标跟踪的程序 81
5.3.3 闪烁噪声下粒子滤波用于目标跟踪的程序 85
本书说明:
该书的研究内容是目标跟踪的状态估计方法,主要有最小二乘估计,Kalman
滤波,扩展Kalman滤波,无迹Kalman滤波以及粒子滤波等,包括理论介绍和
MATLAB源程序两部分。