TLD目标跟踪算法
- 格式:ppt
- 大小:912.50 KB
- 文档页数:31

∙▪Tracking-Learning-Detection (一种目标跟踪算法...∙▪热释光剂量计∙▪调频液体阻尼器∙▪法国TLD集团收藏10732TLD(Tracking-Learning-Detection (一种目标跟踪算法))TLD(Tracking-Learning-Detection)是英国萨里大学的一个捷克籍博士生ZdenekKalal在其攻读博士学位期间提出的一种新的单目标长时间跟踪(long term tracking)算法。
该算法与传统跟踪算法的显著区别在于将传统的跟踪算法和传统的检测算法相结合来解决被跟踪目标在被跟踪过程中发生的形变、部分遮挡等问题。
同时,通过一种改进的在线学习机制不断更新跟踪模块的“显著特征点”和检测模块的目标模型及相关参数,从而使得跟踪效果更加稳定、可靠。
对于长时间跟踪而言,一个关键的问题是:当目标重新出现在相机视野中时,系统应该能重新检测到它,并开始重新跟踪。
但是,长时间跟踪过程中,被跟踪目标将不可避免的发生形状变化、光照条件变化、尺度变化、遮挡等情况。
传统的跟踪算法,前端需要跟检测模块相互配合,当检测到被跟踪目标之后,就开始进入跟踪模块,而此后,检测模块就不会介入到跟踪过程中。
但这种方法有一个致命的缺陷:即,当被跟踪目标存在形状变化或遮挡时,跟踪就很容易失败;因此,对于长时间跟踪,或者被跟踪目标存在形状变化情况下的跟踪,很多人采用检测的方法来代替跟踪。
该方法虽然在某些情况下可以改进跟踪效果,但它需要一个离线的学习过程。
即:在检测之前,需要挑选大量的被跟踪目标的样本来进行学习和训练。
这也就意味着,训练样本要涵盖被跟踪目标可能发生的各种形变和各种尺度、姿态变化和光照变化的情况。
换言之,利用检测的方法来达到长时间跟踪的目的,对于训练样本的选择至关重要,否则,跟踪的鲁棒性就难以保证。
考虑到单纯的跟踪或者单纯的检测算法都无法在长时间跟踪过程中达到理想的效果,所以,TLD方法就考虑将两者予以结合,并加入一种改进的在线学习机制,从而使得整体的目标跟踪更加稳定、有效。

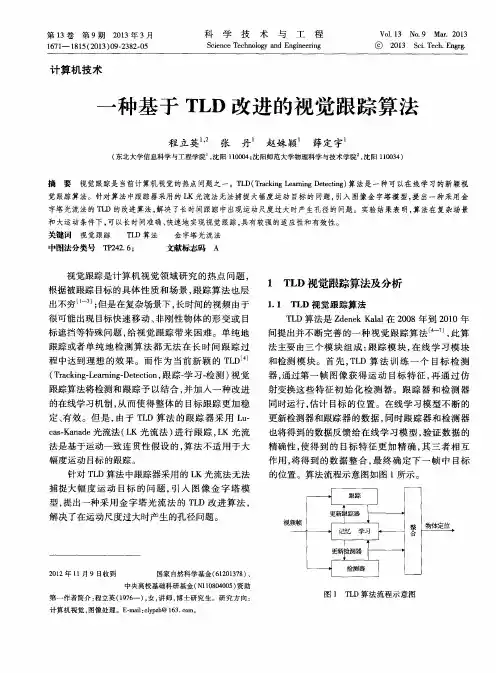
基于TLD的自适应单目标跟踪算法研究摘要针对因光照变化、目标形态变化和遮挡等问题引起的目标自动跟踪失效问题,本文采用优化后的TLD算法在opencv2.4.9和VS2010搭建的平臺上进行仿真实验。
结果表明,利用扩展Kalman滤波器进行目标预测,Mean-shift算法替代TLD算法中跟踪模块的光流法,可减少TLD的计算量,增强TLD算法的稳定性和鲁棒性并且能够自适应的进行目标跟踪。
关键词TLD;目标跟踪;自适应前言目标自动跟踪技术是一项融合图像处理、模式识别、人工智能、自动控制、大规模集成电路等多种不同领域先进成果的综合性技术。
和目标识别一样,目标自动跟踪被广泛应用在军事中。
但战场环境复杂多变,再加上目标本身会发生诸如姿态、大小、运动轨迹、运动速度以及如目标被遮挡等其他各种因素的影响,使得对运动目标的跟踪成为一个难点。
虽然目前已有的算法有很多,但是他们只能在一定条件下或特定场合中对解决某一个或某几个问题效果较好,很难解决复杂场景中各种不确定情况及适应不同场合的运动目标跟踪。
为此,本文对TLD算法进行了改进与优化,使其能较好地解决上述问题[1]。
1 TLD算法的优化由于TLD(Tracking-Learning-Detection)能够较好地实现单目标长时间稳定跟踪,适应目标形态发生的变化,近年来在计算机视觉领域被广泛应用。
相比传统的只能在高斯运动场下使用的粒子滤波、卡尔曼滤波等算法而言,跟踪模块采用光流法的TLD算法则可应用于各种运动场。
但其也有诸多缺点,例如,光流法计算量较大,存在对快速移动目标跟踪准确度不高,有外观相似物体干扰时不能实现较好的稳定跟踪等问题。
为此,本文采用计算量相对较少的Mean-shift算法替代TLD算法中跟踪模块的光流法,同时利用扩展Kalman滤波器进行目标预测,以减少TLD的计算量,增强算法的可靠性。
改进后的算法主要思路如下:初始化Kalman滤波器并进行目标位置的预测,再用得到新的系统状态预测量和新的系统状态测量对Kalman滤波器进行校正。
TLD目标跟踪算法TLD(Track Learning Detection)是一种目标跟踪算法,它结合了目标跟踪和目标检测的方法,能够在复杂环境中跟踪目标并检测目标的丢失。
TLD算法的核心思想是结合在线学习和离线学习的方法,通过检测器(detector)来检测目标,并通过跟踪器(tracker)来跟踪目标。
在在线学习阶段,检测器会进行训练,学习目标的外观特征和形状信息。
而在跟踪阶段,跟踪器会根据检测器的输出来进行目标的跟踪,同时根据跟踪结果反馈给检测器,进行修正。
TLD算法的具体步骤如下:1. 首先,通过一个强分类器进行目标检测。
这个强分类器使用了Haar特征和Adaboost算法进行训练,能够在图像中快速定位目标。
2.检测到目标后,根据目标的位置和尺度信息,将目标裁剪出来作为正样本,并提取其外观特征,包括颜色、纹理等。
3.同时,从目标附近随机选择一些负样本,并提取其外观特征。
这些负样本一般是与目标外观相似的背景区域。
4. 然后,使用一个在线集成学习器(Online Ensemble Learning)来学习目标的外观特征。
这个学习器使用了随机决策的方法,通过多个弱分类器的投票来进行目标的分类。
5.在跟踪阶段,通过跟踪器来进行目标的跟踪。
跟踪器使用了一个模板,通过计算目标与模板的相似度来判断目标的位置。
6.如果跟踪器发生目标丢失,即目标与模板的相似度低于一个阈值,那么就需要重新进行目标检测。
7.在进行目标检测时,使用之前训练得到的检测器,来对图像进行目标检测。
同时,根据跟踪器的输出结果,对检测器进行修正,从而提高检测的准确率。
TLD算法的优点是能够在复杂环境中进行目标跟踪,并且能够适应目标的外观变化。
它通过结合目标检测和目标跟踪的方法,能够在目标丢失时及时进行目标检测,从而提高了跟踪的准确率和稳定性。
然而,TLD算法也有一些缺点。
首先,由于在跟踪阶段是基于目标检测结果来进行跟踪的,所以在目标遮挡或者快速移动时容易出现跟踪失败。
视频监控系统中的目标跟踪技术随着科技的不断进步,视频监控系统已经成为了现代城市管理、安全监控等领域的重要手段。
而其中的目标跟踪技术则是视频监控系统中的重要一环。
本文将从技术原理、应用场景、发展趋势等方面进行分析和探讨。
一、技术原理目标跟踪技术可以概括为:通过对视频中特定物体的识别和跟踪,实现对该物体的动态监控。
其核心技术包括目标检测、目标跟踪和目标识别。
目标检测是指在图像或视频序列中检测到指定目标的过程。
常用的目标检测算法包括 Haar 特征、HOG 特征、LBP 特征、SIFT 特征等。
这些算法都是通过提取目标的特征,然后将特征与预先训练好的模型进行匹配,从而识别出目标。
目标跟踪是将目标从一个场景中的一帧图像跟踪到另一帧图像的过程。
它可以分为点跟踪和区域跟踪两种,其中区域跟踪更为常见。
常用的目标跟踪算法包括KCF、TLD、MOSSE、CSR-DCF 等。
目标识别是指对目标进行分类识别,常用的算法包括SVM、CNN、RCNN 等。
目标识别的目的在于将目标与其他物体进行区分,从而实现更加精确的监控和跟踪。
二、应用场景目标跟踪技术在现代社会的各个领域都有非常广泛的应用。
其中最为常见的应用场景是视频监控和安防。
在视频监控中,目标跟踪技术可以帮助安防人员实现对可疑人员或物品的定位、跟踪和拍摄。
同时,目标识别技术还可以对不同类型的目标进行分类和识别,从而实现更加精细化的监控。
在智能交通领域,目标跟踪技术可以实现对车辆、行人等交通参与者的跟踪和识别。
其中,目标跟踪技术通过对车辆的跟踪,可以实现对交通流量的监控和控制;对行人的跟踪,则可以帮助警方对司法案件进行调查和侦破。
在医疗领域,目标跟踪技术可以实现对病人的监控和识别。
例如,在 ICU 中使用目标跟踪技术,可以实时监测病人的身体各项数据,并在出现异常情况时及时报警,从而保障病人的生命安全。
三、发展趋势随着人工智能技术的发展,目标跟踪技术也将得到进一步的提升。
目标跟踪算法目标跟踪算法是指通过视频分析技术,实时追踪视频序列中的目标并获取其位置、形状、速度等信息的一种算法。
目标跟踪算法在计算机视觉、机器人、无人驾驶等领域广泛应用,能够实现自动驾驶、智能监控、动作捕捉等功能。
目标跟踪算法的主要步骤包括目标检测、目标跟踪和目标预测。
目标检测是指通过检测算法从视频帧中提取目标的位置和形状信息。
目标检测算法有很多种,常用的包括基于深度学习的卷积神经网络(CNN)算法和基于传统计算机视觉方法的背景建模、特征提取和分类器等算法。
目标跟踪是指在视频序列中连续追踪目标的位置和形状信息,实时更新目标的状态。
目标跟踪算法有很多种,常用的包括基于特征匹配的相关滤波器算法、卡尔曼滤波器算法和粒子滤波器算法等。
这些算法通过使用目标的特征信息(如颜色直方图、纹理特征等)来匹配目标并更新目标状态,从而实现目标的连续跟踪。
目标预测是指在目标跟踪的基础上,对目标未来位置进行预测。
目标预测算法有很多种,常用的包括基于卡尔曼滤波器的预测算法和基于运动模型的预测算法等。
这些算法通过分析目标的运动规律来推测目标未来位置,从而提前做出反应。
目标跟踪算法的性能指标通常包括跟踪精度、实时性和鲁棒性等。
跟踪精度是指算法追踪目标的准确度,即目标位置和形状信息的准确性。
实时性是指算法处理速度的快慢,即算法在给定时间内能够处理的视频帧数。
鲁棒性是指算法对噪声、光照变化、遮挡等外界干扰的抗干扰能力。
目标跟踪算法的应用非常广泛,如智能监控、自动驾驶、图像检索等。
智能监控系统可以通过目标跟踪算法实现对目标的自动跟踪和报警功能。
自动驾驶系统可以通过目标跟踪算法实现对前方车辆和行人的跟踪和避让功能。
图像检索系统可以通过目标跟踪算法实现对目标图像的搜索和匹配功能。
总之,目标跟踪算法是一种重要的视频分析技术,具有广泛的应用前景。
随着深度学习等技术的发展,目标跟踪算法的性能将进一步提升,应用范围也将更加广泛。
目标检测跟踪计数教程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by the editor. I hope that after you download them, they can help yousolve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts,other materials and so on, want to know different data formats and writing methods, please pay attention!目标检测跟踪计数是计算机视觉领域中一个重要的研究方向,旨在通过算法让计算机能够自动识别视频或图像中的目标,实现目标的跟踪并对目标进行计数。
单目标跟踪的主要算法
基于特征的方法:基于特征的方法通过提取目标的颜色、纹理和形状等特征进行跟踪。
在目标被完全遮挡的情况下,基于特征的方法往往容易失效。
常用的算法包括:Mean Shift、Camshift、TLD等。
基于滤波的方法:基于滤波的方法通过建立一个滤波器来预测目标的位置和运动轨迹。
常用的算法包括:Kalman Filter、Particle Filter等。
这些方法对于线性系统的跟踪比较有效,但在处理非线性系统时可能会出现问题。
基于深度学习的方法:随着深度学习技术的发展,基于深度学习的方法在单目标跟踪领域也取得了很大的进展。
这些方法通过训练神经网络来学习目标的特征表示,并利用这些特征进行跟踪。
常用的算法包括:Siamese Network、Tracklet Network等。
基于深度学习的方法在处理复杂场景和遮挡问题时具有较好的性能,但需要大量的计算资源和训练数据。
基于生成模型的方法:基于生成模型的方法通过构建目标模型来生成目标的候选位置,并利用一些规则进行筛选。
常用的算法包括:Multiple Hypothesis Tracking、Tracklet-based Tracking等。
基于生成模型的方法在处理遮挡问题时具有一定的优势,但在处理复杂场景时可能会出现问题。
以上是单目标跟踪的主要算法,各种算法都有其优缺点,在实际应用中需要根据具体场景选择合适的算法。
卷积神经网络与时空上下文结合的目标跟踪算法闵召阳;赵文杰【摘要】In this paper, an algorithm of the target tracking combining convolution neural network with the temporal and spatial context is proposed. In the framework of the context-based algorithm, the convolutional neural network algorithm is integrated to improve the stability and robustness of the tracking system. The Kalman filter is introduced to deal with the problem that the target is obscured. In addition, the whole tracking system adopts a coarse-to-fine target location method, and the target localization is achieved by the temporal and spatial context algorithm, and the target location is accurately located by the convolution neural network. Experimental results show that the proposed algorithm is stable and robust for real-time performance.%本文所提算法是一种卷积神经网络与时空上下文结合的目标跟踪算法.将卷积神经网络算法融入时空上下文算法框架下,使得跟踪系统整体的鲁棒性有显著提高.引入Kalman滤波来处理目标被严重遮挡时,跟踪框容易漂移的问题.此外,整个跟踪系统采取由粗到精的双重目标位置定位方式,由时空上下文算法实现目标初定位,由卷积神经网络进行目标位置的精确定位.经实验验证,算法不仅稳定性和鲁棒性较好,而且实时性的条件也基本满足.【期刊名称】《红外技术》【年(卷),期】2017(039)008【总页数】6页(P740-745)【关键词】目标跟踪;时空上下文;卷积神经网络【作者】闵召阳;赵文杰【作者单位】空军航空大学航空航天情报系,吉林长春 130022;空军航空大学航空航天情报系,吉林长春 130022【正文语种】中文【中图分类】TP391目标跟踪是计算机视觉领域比较热门的研究热点之一,目前在这方面有很多优秀的算法,但是这些算法通常只能在处理某一类问题时表现出色,很难找到一种算法在应付目标的尺度变化,形状变化,运动速度和方向变化,环境光照以及目标遮挡等一系列问题时都保持鲁棒的跟踪。
基于KCF相似度的TLD目标跟踪算法KCF(Kernelized Correlation Filter)相似度算法是一种常用于目标跟踪的算法。
TLD(Tracking-Learning-Detection)目标跟踪算法是一种融合了检测和学习的算法。
本文将介绍基于KCF相似度的TLD目标跟踪算法。
TLD目标跟踪算法的核心思想是通过检测算法来定位目标,并通过学习算法来提高目标跟踪的准确性和鲁棒性。
在传统的TLD算法中,通常使用HOG(Histogram of Oriented Gradients)特征来表示目标的外观信息,并使用机器学习算法(如随机森林)进行目标的分类和识别。
但是,由于目标的外观可能会发生剧烈变化,传统的TLD算法在目标出现遮挡、光照变化、形变等情况下的性能表现较差。
为了提高目标跟踪算法的准确性和鲁棒性,我们可以引入KCF相似度算法。
KCF相似度算法是一种基于相关滤波器的目标跟踪算法,它通过将目标特征的离散傅立叶变换(DFT)与正定核函数相结合,来进行目标的相似度计算。
KCF相似度算法具有较快的运算速度和较好的鲁棒性,可以在目标出现较大变化时仍能准确跟踪目标。
1.初始化目标区域:使用目标检测算法(如HOG+SVM)初始化目标的位置和外观信息。
2.提取目标特征:将目标区域的图像进行预处理,并提取图像特征,如颜色直方图、HOG特征等。
3.训练模型:使用KCF相似度算法对目标特征进行训练,得到目标的跟踪模型。
4.目标跟踪:对于每一帧图像,通过计算当前帧图像与目标模型之间的相似度,确定目标的位置。
5.目标更新:通过更新目标模型,使其能够适应目标的外观变化和遮挡等情况。
6.错误修正:根据目标跟踪的结果,对跟踪错误进行修正,如通过目标形状的检测和形状模型的更新等。
基于KCF相似度的TLD目标跟踪算法通过引入KCF相似度算法,克服了传统TLD算法在目标外观变化和遮挡等情况下的不足,提高了目标的跟踪准确性和鲁棒性。
⽬标跟踪算法综述第⼀部分:⽬标跟踪速览先跟⼏个SOTA的tracker混个脸熟,⼤概了解⼀下⽬标跟踪这个⽅向都有些什么。
⼀切要从2013年的那个数据库说起。
如果你问别⼈近⼏年有什么⽐较niubility的跟踪算法,⼤部分⼈都会扔给你吴毅⽼师的论⽂,OTB50和OTB100(OTB50这⾥指OTB-2013,OTB100这⾥指OTB-2015,50和100分别代表视频数量,⽅便记忆):Wu Y, Lim J, Yang M H. Online object tracking: A benchmark [C]// CVPR, 2013.Wu Y, Lim J, Yang M H. Object tracking benchmark [J]. TPAMI, 2015.顶会转顶刊的顶级待遇,在加上引⽤量1480+320多,影响⼒不⾔⽽喻,已经是做tracking必须跑的数据库了,测试代码和序列都可以下载:,OTB50包括50个序列,都经过⼈⼯标注:两篇论⽂在数据库上对⽐了包括2012年及之前的29个顶尖的tracker,有⼤家⽐较熟悉的OAB, IVT, MIL, CT, TLD, Struck等,⼤都是顶会转顶刊的神作,由于之前没有⽐较公认的数据库,论⽂都是⾃卖⾃夸,⼤家也不知道到底哪个好⽤,所以这个database的意义⾮常重⼤,直接促进了跟踪算法的发展,后来⼜扩展为OTB100发到TPAMI,有100个序列,难度更⼤更加权威,我们这⾥参考OTB100的结果,⾸先是29个tracker的速度和发表时间(标出了⼀些性能速度都⽐较好的算法):接下来再看结果(更加详细的情况建议您去看论⽂⽐较清晰):直接上结论:平均来看Struck, SCM, ASLA的性能⽐较⾼,排在前三不多提,着重强调CSK,第⼀次向世⼈展⽰了相关滤波的潜⼒,排第四还362FPS简直逆天了。
速度排第⼆的是经典算法CT(64fps)(与SCM, ASLA等都是那个年代最热的稀疏表⽰)。
TLD算法原理及应用实例TLD(Tracking-Learning-Detection)算法是一种基于机器学习的目标跟踪算法,它可以用于实时跟踪视频中的目标物体,并通过学习目标外观的变化来提高跟踪的准确性。
在定位阶段,TLD算法会通过初始目标框的位置,提取目标的特征描述子,例如Haar-like特征或HOG特征等。
利用目标的外观特征,TLD算法能够预测目标在下一帧中的位置,从而实现目标的跟踪。
在学习阶段,TLD算法会根据目标的当前外观和位置信息,更新目标的外观模型。
通过学习目标的外观模型,TLD算法能够适应目标外观的变化,尤其是面对目标干扰、遮挡或形变等情况。
在检测阶段,TLD算法会使用学习到的目标外观模型,在整个图像中进行物体检测。
通过检测步骤,TLD算法可以发现目标的新位置,并在跟踪过程中进行修正,以保持目标在视频帧中的准确跟踪。
1.视频监控:TLD算法可以用于实时监控摄像头拍摄的视频,跟踪并定位监控区域内的目标,例如行人、车辆等。
在安防领域,TLD算法可以实现24小时不间断的目标跟踪,帮助安保人员及时发现异常事件。
2.交通管理:TLD算法可以用于交通监控系统,实时跟踪车辆并提取其特征信息,例如车牌号码、车辆颜色等。
通过车辆的跟踪,交通管理部门可以及时收集交通数据,并实现车辆违法行为的监测和处罚。
3.人机交互:TLD算法也可以应用于人机交互领域。
通过跟踪用户的手势或身体动作,可以实现手势识别、动作捕捉等功能。
这个应用场景可以应用在虚拟现实、游戏、体感互动等领域。
4.智能驾驶:TLD算法在自动驾驶系统中也有广泛的应用。
通过实时跟踪其他车辆和行人,自动驾驶车辆可以及时做出反应,规避潜在的危险。
同时,TLD算法可以学习车辆和行人的行为模式,提高自动驾驶系统的感知和决策能力。
总结来说,TLD算法是一种基于机器学习的目标跟踪算法,可以应用于视频监控、交通管理、人机交互等领域。
通过利用目标的外观特征、学习目标的外观模型,并结合物体检测方法,TLD算法可以实现高精度的目标跟踪,并在实际应用中发挥重要作用。
第45卷 第3期2021年5月激 光 技 术LASERTECHNOLOGYVol.45,No.3May,2021 文章编号:1001 3806(2021)03 0292 06基于改进TLD算法的激光视觉传感型焊缝跟踪杜健准1,高向东1,黎扬进1,肖小亭1,孙友松1,卢新钊2(1.广东工业大学广东省焊接工程技术研究中心,广州510006;2.广东精泰人防工程有限公司,肇庆526238)摘要:为了解决基于线激光视觉传感的焊缝中心位置定位精度不高的问题,采用了一种基于改进跟踪 学习 检测(TLD)算法的焊缝跟踪方法。
由激光视觉传感器实时获取焊缝图像,采用将跟踪器与检测器结合的TLD算法实时跟踪焊缝特征点,同时通过在线学习机制更新分类器参量。
在此基础上对激光条纹图像截取感兴趣区域,大幅减少检测器的搜索区域;根据激光条纹光强分布特性,结合纠偏方向选取跟踪器有效特征点,以此提高算法效率,对不锈钢板V型焊缝和搭接焊缝进行跟踪试验。
结果表明,跟踪与检测可实现共同定位焊缝中心位置,其融合的焊缝跟踪方法能够准确地提取焊缝特征点,两种焊缝跟踪平均绝对误差分别为0.062mm和0.052mm。
此方法为提高焊缝跟踪精度提供了依据。
关键词:图像处理;焊缝跟踪;跟踪 学习 检测算法;激光视觉中图分类号:TN249;TG409 文献标志码:A doi:10 7510/jgjs issn 1001 3806 2021 03 004AlaservisionsensingmethodforseamtrackingbasedonanimprovedTLDalgorithmDUJianzhun1,GAOXiangdong1,LIYangjin1,XIAOXiaoting1,SUNYousong1,LUXinzhao2(1.GuangdongProvincialWeldingEngineeringTechnologyResearchCenter,GuangdongUniversityofTechnology,Guangzhou510006,China;2.GuangdongJingtaiCivilAirDefenseProjectsCo.Ltd.,Zhaoqing526238,China)Abstract:Inordertosolvetheproblemoflowpositioningaccuracyoftheweldseamcenterbasedonlinelaservisionsensing,aseamtrackingmethodbasedonanimprovedtracking learning detection(TLD)algorithmwasadopted.Theweldimageswereacquiredinrealtimeduringtheweldseamtracking.TheTLDalgorithmcombiningthetracker(tracking)andthedetector(detection)wasadoptedtotrackweldfeaturepointsinrealtimeandtheonlinelearningmechanism(learning)wasadoptedtoupdatetheclassifierparameters,soastoimprovetheaccuracyofseamtracking.Onthisbasis,theregionofinterest(ROI)wasinterceptedfromthelaserstripeimages,whichgreatlyreducedthedetector’ssearcharea.Theeffectivefeaturepointsofthetrackerwereselectedtoimprovetheefficiencyofthealgorithmaccordingtothecharacteristicsofthelightintensitydistributionofthelaserstripeincombinationwiththerectifyingdirection.TheV shapedweldandthelappedweldofthestainlesssteelplateweretracked.Theresultsindicatethatthelocationoftheseamcentercanbeachievedbytrackinganddetectingandthefusionweldtrackingmethodcanaccuratelyextractweldfeaturepoints.Themeanabsolutetrackingerrorsofbothweldseamswere0.062mmand0.052mm.Thismethodprovidesthebasisforimprovingtheaccuracyofweldseamtracking.Keywords:imageprocessing;seamtracking;TLDalgorithm;laservision 基金项目:国家自然科学基金资助项目(51675104);广州市科技计划资助项目(202002020068);广东省教育厅创新团队资助项目(2017KCXTD010)作者简介:杜健准(1994 ),男,硕士研究生,主要从事焊接自动化方面的研究。