最新《移动机器人原理与设计》第六章移动机器人感知
- 格式:ppt
- 大小:303.00 KB
- 文档页数:18
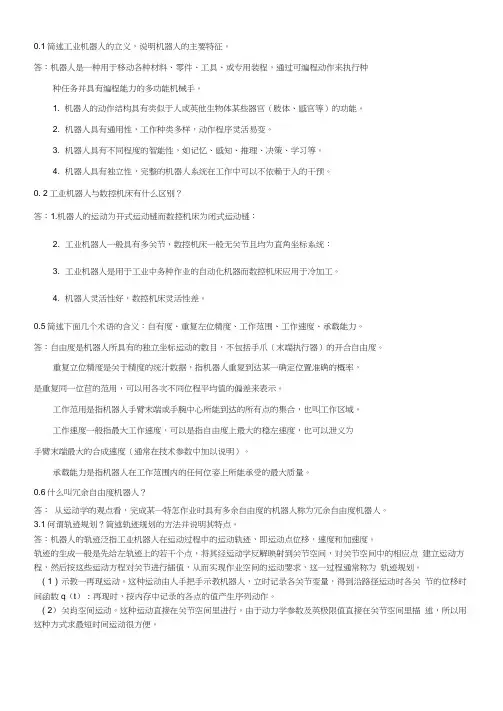
0.1简述工业机器人的立义,说明机器人的主要特征。
答:机器人是一种用于移动各种材料、零件、工具、或专用装程,通过可编程动作来执行种种任务并具有编程能力的多功能机械手。
1. 机器人的动作结构具有类似于人或英他生物体某些器官(肢体、感官等)的功能。
2. 机器人具有通用性,工作种类多样,动作程序灵活易变。
3. 机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。
4. 机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。
0. 2工业机器人与数控机床有什么区别?答:1.机器人的运动为开式运动链而数控机床为闭式运动链:2. 工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统:3. 工业机器人是用于工业中务种作业的自动化机器而数控机床应用于冷加工。
4. 机器人灵活性好,数控机床灵活性差。
0.5简述下面几个术语的含义:自有度、重复左位精度、工作范围、工作速度、承载能力。
答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。
重复立位精度是关于精度的统汁数据,指机器人重复到达某一确定位置准确的概率,是重复同一位苣的范用,可以用各次不同位程平均值的偏差来表示。
工作范用是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
工作速度一般指最大工作速度,可以是指自由度上最大的稳左速度,也可以泄义为手臂末端最大的合成速度(通常在技术参数中加以说明)。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
0.6什么叫冗余自由度机器人?答:从运动学的观点看,完成某一特怎作业时具有多余自由度的机器人称为冗余自由度机器人。
3.1何谓轨迹规划?简述轨迹规划的方法并说明其特点。
答:机器人的轨迹泛指工业机器人在运动过程中的运动轨迹,即运动点位移,速度和加速度。
轨迹的生成一般是先给左轨迹上的若干个点,将其经运动学反解映射到关节空间,对关节空间中的相应点建立运动方程,然后按这些运动方程对关节进行插值,从而实现作业空间的运动要求,这一过程通常称为轨迹规划。
智能信息处理技术论文论文题目:多传感器数据融合技术在移动机器人中的应用学院:自动化学院专业:控制理论与控制工程学号:XX:序号:多传感器数据融合技术在移动机器人中的应用摘要机器人多传感器数据融合是当今科学研究的热点问题。
综述了多传感器数据融合技术在移动机器人几个工作阶段中的应用。
指明了移动机器人领域中多传感器数据融合技术的开展趋势。
关键词移动机器人多传感器数据融合AbstractNowadays, the multi-sensor data fusion of robots is an intensive topicin scientific research. The application of multi-sensor data fusion technology in mobile robots' several sessions is described. At last, future development trends of this technology arealso presented.Key Wordmobile robot multi-sensor data fusion前言随着传感器种类的日益丰富和传感器技术的飞速开展,多传感器数据融合技术得到了越来越多的关注。
并且由于其在解决探测、跟踪和识别等问题上具有生存能力强,能够增强系统检测性能、可信度、鲁棒性和可靠性,可以提高测量数据精度,扩展系统的时间和空间覆盖X围[1]等优势,多传感器数据融合在军事、农业、工业等各个领域上的应用越来越频繁。
其中,数据融合技术在机器人研究领域的应用也正处在快速开展的阶段,特别是在移动机器人中,数据融合技术的应用就更为广泛了。
本文比拟分析了现有移动机器人上所应用的多传感器数据融合技术,并对未来移动机器人研究领域内数据融合技术的开展进展了合理的展望。
正文1 移动机器人技术简介移动机器人是一类能够通过传感器感知自身状态和周围环境,实现在复杂未知中面向目标的自主运动,并完成预定任务的机器人系统[2,3]。

WMR具有结构简单、控制方便、运动灵活、维护容易等优点,但也存在一些局限性,如对环境的适应性、运动稳定性、导航精度等方面的问题。
轮式移动机器人的定义与特点特点定义军事应用用于生产线上的物料运输、仓库管理等,也可用于执行一些危险或者高强度任务,如核辐射环境下的作业。
工业应用医疗应用第一代WMR第二代WMR第三代WMRLagrange方程控制理论牛顿-Euler方程动力学建模的基本原理车轮模型机器人模型控制系统模型030201轮式移动机器人的动力学模型仿真环境模型验证性能评估动力学模型的仿真与分析开环控制开环控制是指没有反馈环节的控制,通过输入控制信号直接驱动机器人运动。
反馈控制理论反馈控制理论是运动控制的基本原理,通过比较期望输出与实际输出之间的误差,调整控制输入以减小误差。
闭环控制闭环控制是指具有反馈环节的控制,通过比较实际输出与期望输出的误差,调整控制输入以减小误差。
运动控制的基本原理PID控制算法模糊控制算法神经网络控制算法轮式移动机器人的运动控制算法1 2 3硬件实现软件实现优化算法运动控制的实现与优化路径规划的基本原理路径规划的基本概念路径规划的分类路径规划的基本步骤轮式移动机器人的路径规划方法基于规则的路径规划方法基于规则的路径规划方法是一种常见的路径规划方法,它根据预先设定的规则来寻找路径。
其中比较常用的有A*算法和Dijkstra算法等。
这些算法都具有较高的效率和可靠性,但是需要预先设定规则,对于复杂的环境适应性较差。
基于学习的路径规划方法基于学习的路径规划方法是一种通过学习来寻找最优路径的方法。
它通过对大量的数据进行学习,从中提取出有用的特征,并利用这些特征来寻找最优的路径。
其中比较常用的有强化学习、深度学习等。
这些算法具有较高的自适应性,但是对于大规模的环境和复杂的环境适应性较差。
基于决策树的路径规划方法基于强化学习的路径规划方法决策算法在轮式移动机器人中的应用03姿态与平衡控制01传感器融合技术02障碍物识别与避障地图构建与定位通过SLAM(同时定位与地图构建)技术构建环境地图,实现精准定位。
移动机器人智能导航与路径规划系统设计智能导航与路径规划系统是现代移动机器人领域中至关重要的技术之一。
它使得移动机器人能够在复杂环境中自主导航,并规划合适的路径以完成特定任务。
本文将深入探讨移动机器人智能导航与路径规划系统的设计原理和关键技术。
一、智能导航系统的设计智能导航系统旨在通过传感器、定位系统和环境地图等组件,使移动机器人能够了解自身位置和周围环境,并根据其目标进行自主导航。
1. 传感器传感器是智能导航系统中的关键组件之一。
常用的传感器包括激光雷达、摄像头、超声波传感器等。
激光雷达可以通过测量回波时间来准确探测出障碍物的距离和形状,摄像头则可以用于图像识别和目标跟踪,超声波传感器则适用于近距离障碍物的检测。
2. 定位系统定位系统用于确定移动机器人当前的位置。
常见的定位系统包括全球定位系统(GPS)、惯性导航系统(INS)和视觉定位系统。
GPS可以提供全球性的位置信息,但在室内环境下会受到信号遮挡的影响。
INS可以通过测量加速度和角速度来估计位置,但存在误差积累的问题。
视觉定位系统则依靠计算机视觉算法来识别环境中的特征点和物体,从而进行定位。
3. 环境地图环境地图是智能导航系统中的核心组成部分。
它包含了地图的拓扑结构、障碍物的位置和特征等信息。
常用的环境地图表示方法包括栅格地图、拓扑图和语义地图。
栅格地图将环境划分为一系列网格,拓扑图则是通过节点和边来表示环境的连通性,语义地图则融合了语义信息,使得机器人可以理解环境中的语义概念。
二、路径规划系统的设计路径规划系统旨在为移动机器人提供合适的路径,使其能够安全高效地到达目标点。
路径规划可以基于环境地图、机器人能力和任务需求等因素进行。
1. 单目标路径规划单目标路径规划是最基础的路径规划问题,即机器人在环境中寻找一条最短路径或最快路径到达目标点。
常用的算法包括A*算法、最短路径算法和Dijkstra算法等。
这些算法根据环境地图中的障碍物和机器人的运动能力,通过权衡路径的代价和可行性,寻找出最优的路径。
学科分类号0807本科毕业设计题目(中文):移动机器人结构设计(英文):Mobile robot structure design姓名陈霄锋学号2008180235院(系)工学院机械工程系专业、年级 2008级机械设计制造及其自动化指导教师彭可副教授二○一二年五月湖南师范大学本科毕业设计诚信声明本人郑重声明:所呈交的本科毕业设计,是本人在指导老师的指导下,独立进行研究工作所取得的成果,成果不存在知识产权争议,除设计中已经注明引用的内容外,本设计不含任何其他个人或集体已经发表或撰写过的作品成果。
对本设计的研究做出重要贡献的个人和集体均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
本科毕业设计作者签名:二○一二年五月十四日湖南师范大学本科毕业设计任务书毕业设计题目移动式机器人结构设计作者姓名陈霄锋所属院、专业、年级工学院机械设计制造及其自动化专业08年级指导教师姓名、职称彭可副教授预计字数10000开题日期2011-12-19选题的目的和意义:出于个人兴趣我选择了这个设计题目,目的在于了解移动机器人的结构设计及其控制系统的设计,为将来研究此方面内容做基础。
国内有关移动机器人研究的起步较晚,但也取得了不少成绩。
2003年国防科技大学贺汉根教授主持研制的无人驾驶车采用了四层递阶控制体系结构以及机器学习等智能控制算法,在高速公路上达到了130 Km/h的稳定时速,最高时速170 Km/h,而且具备了自主超车功能,这些技术指标均处于世界领先的地位。
但是我国在机器人的核心及关键技术的原创性研究、高性能关键工艺装备的自主设计和制造能力、高可靠性基础功能部件的批量生产应用等方面,同发达国家相比,我国仍存在较大的差距。
未来研究热点是将各种智能控制方法应用到移动机器人的控制。
所以研究和在这个方面的创新是有意义的。
主要研究内容:1、移动机器人的移动方式2、机器人的结构设计3、机器人控制系统的简单设计应达到的技术指标或要求:1、能较灵活移动2、能有基本的越障能力3、设计说明书字数不少于100004、3D装配图一幅和零件图主要设计方法或技术路线:首先进行移动方式的分析与选择,选择合适的驱动电机和驱动机构,再根据控制系统来设计机器人的机构,选择和设计合适的零件和机构。
移动机器人路径规划算法设计与优化移动机器人在现代工业生产和服务领域中的应用越来越广泛。
为了使机器人能够在复杂的环境中高效地完成任务,路径规划算法的设计和优化变得尤为重要。
本文将介绍移动机器人路径规划算法的设计原理和优化方法,并探讨其在实际应用中的挑战和发展趋势。
一、移动机器人路径规划算法的设计原理1. 探索算法探索算法是移动机器人路径规划中常用的一种方法。
其基本原理是根据机器人对环境的感知信息,采用搜索算法来不断地探索未知领域,直到发现目标位置或者到达指定的探索深度。
常见的探索算法包括深度优先搜索、广度优先搜索和A*算法等。
2. 基于规则的算法基于规则的算法主要是根据机器人对环境中障碍物、地形和任务需求等的认知,制定一系列路径规划规则,从而指导机器人的移动。
这种算法适用于环境相对简单且规则性较强的情况。
3. 基于图搜索的算法基于图搜索的算法将环境建模为一个图,机器人的移动过程可以看作是在该图上的一系列节点的遍历。
通过在图上进行搜索和优化,机器人可以找到最优的路径。
常见的图搜索算法有Dijkstra 算法、Bellman-Ford算法和A*算法等。
二、移动机器人路径规划算法的优化方法1. 启发式搜索优化启发式搜索算法通过引入启发函数,提供更准确的路径评估和优化策略的选择。
通过合理设计启发函数,可以在保证搜索效率的同时,更快速地找到最优路径。
A*算法是一种常用的启发式搜索算法,通过估计目标位置和起点之间的代价函数,从而实现路径规划的优化。
2. 动态路径规划优化在移动机器人的实际应用中,环境和任务需求会随时间发生变化,因此需要实时进行路径规划的优化。
动态路径规划优化算法可以根据实时的环境信息和机器人的状态,及时修正原有的路径规划方案,以适应变化的环境需求。
常见的动态路径规划优化方法有遗传算法和模拟退火算法等。
3. 分布式路径规划优化当多台移动机器人同时进行路径规划时,为了提高整体系统效率,需要考虑分布式路径规划优化。
轮式移动机器人的结构设计学生姓名:张华班级:078105131指导老师:许瑛摘要:随着机器人技术在外星探索、野外考察、军事、安全等全新的领域得到日益广泛的采用,机器人技术由室内走向室外,由固定、人工的环境走向移动、非人工的环境。
本课题是机器人设计的基本环节,能够为后续关于机器人的研究提供有价值的平台参考和有用的思路。
本文介绍了已有的机器人移动平台的发展现状和趋势,分析操作手臂常用的结构和工作原理,根据选定的方案对带有机械臂的全方位移动机器人进行本体设计,包括全方位车轮旋转机构的设计、车轮转向机构的设计和机器人操作臂的设计。
要求全方位移动机构转向、移动灵活,可以快速、有效的到达指定地点;机械臂操作范围广、运动灵活、结构简单紧凑且尺寸小,可以快速、准确的完成指定工作。
设计完成后要分析全方位移动机构的性能,为后续的研究提供可靠的参考和依据。
关键字:机器人移动平台操作臂简单快速准确指导老师签名:Structure design of wheeled mobile robotsStudent name: Zhang hua Class: 0781051Supervisor: Xu yingAbstract:with the robot technology in an alien exploration, field survey, military and security new areas to be increasingly widely adopted, robot technology by indoor, outdoor by fixed, to move towards artificial environment, the artificial environment. This topic is the basic link, robot design for the follow-up about robots can provide valuable reference and useful ideas platform.This article summarizes the existing robot mobile platform development status and trends of operating the arm structure and principle of common, According to the selected scheme of mechanical arm with ontology omni-directional mobile robots designed, including the design of all-round wheel rotating mechanism, wheel steering mechanism of design and the design of robot manipulator. Request to change direction, move the omni-directional mobile institution, can quickly and effectively flexible the reaches the specified location; Mechanical arm operation scope, sports flexible, simple and compact structure and size is small, can quickly and accurately completed tasks. The design is completed to analyze the performance of the omni-directional mobile institutions for subsequent research, provide reliable reference and basis.Keywords: Robot mobile platform manipulator simple accurate and quickSignature of Supervisor:本文由闰土服务机械外文文献翻译成品淘宝店整理目录1.绪论1.1引言 (1)1.2国内外相关领域的研究现状 (1)1.3主要研究内容 (5)2.全向移动机器人移动结构设计2.1引言 (5)2.2机械设计的基本要求 (6)2.3全方位轮式移动机构的设计 (6)2.3.1移动机器人车轮旋转机构设计 (7)2.3.2移动机器人转向机构设计 (10)2.3.3电机的选型与计算 (12)2.4移动机器人车体机构设计 (15)2.5本章小结 (16)3.机械手臂的设计3.1末端执行器的设计 (16)3.1.1末端执行器的设计要求 (17)3.1.2末端执行器的设计 (17)3.1.3电机的选型与计算 (20)3.2机械手臂杆件的设计 (21)3.2.1腕部结构设计 (21)3.2.2臂部结构设计 (21)3.2.3机械臂电机的选型与计算 (23)3.3本章小结 (23)4.机械材料的选择和零件的校核4.1机械材料的选用原则 (24)4.2零件材料选择和强度校核 (25)4.3本章小结 (29)参考文献 (30)致谢 (31)附录1 绪论1.1 引言移动机器人已经成为机器人研究领域的一个重要分支。
移动机器人视觉导航算法的研究与设计的开题报告一、选题的背景及意义近年来,随着移动机器人的快速发展,人们对其功能的需求也越来越高。
移动机器人视觉导航算法是指移动机器人在运动过程中运用视觉传感器所采集的信息实现自主导航。
其在机器人探测、物流、清洁、安保等领域中具有广泛的应用,并且未来有着更为广阔的发展前景。
因此,研究移动机器人视觉导航算法的实现及其优化具有重要的理论和实践意义。
二、选题的目的和内容本论文旨在研究并设计一种移动机器人视觉导航算法,实现移动机器人在运动过程中的自主导航。
本文的研究内容包括:1.对现有移动机器人视觉导航算法进行分析和总结。
2.研究移动机器人视觉导航算法的工作原理和基本实现方法,并建立算法数学模型。
3.设计一种基于视觉传感器的机器人位置估计算法,实现机器人的精确定位和追踪。
4.研究移动机器人路径规划算法,设计一种基于局部最优化和全局优化的路径规划算法。
5.设计移动机器人控制模块,实现机器人的动态控制,使其能够遵循规划的路径进行移动。
三、选题的方法和技术路线本论文采用了理论分析和实验对比等方法。
首先,对现有移动机器人视觉导航算法进行分析和总结,以掌握其基本实现方法和优缺点。
然后,研究视觉传感器的原理及其在机器人自主导航中的应用,确定技术实现路线。
接着,根据研究结果,建立算法数学模型。
然后,设计一种机器人位置估计算法和路径规划算法,并实现算法验证。
最后,设计移动机器人控制模块,实现机器人的动态控制,使其能够遵循规划的路径进行移动。
四、可行性分析随着科技的不断进步,越来越多的高精度、高速度、低成本的视觉传感器被广泛应用于移动机器人中。
本文研究的移动机器人视觉导航算法是基于现有视觉传感器技术、机器人控制理论和路径规划算法,因此其技术可行性较高。
同时,本论文将对算法的性能进行实验对比验证,对研究结果具有较高的可靠性和实用性。
五、预期的研究成果通过本论文的研究,预期达到以下成果:1.总结现有移动机器人视觉导航算法,明确其优缺点和应用场景。